Спосіб антиблокувального керування гальмуванням з підвищеною курсовою стійкістю транспортного засобу
Номер патенту: 11673
Опубліковано: 16.01.2006
Автори: Тимофєєв Віталій Сергійович, Богатиренко Костянтин Іванович, Лавріненко Олександр Сергійович
Формула / Реферат
Спосіб антиблокувального керування гальмуванням транспортного засобу, при якому екстремальне автоматичне керування гальмуванням транспортного засобу здійснюють шляхом виміру тангенціальної складової сили тертя між гальмовим диском і гальмовою колодкою при розгальмовуванні колеса в точці фактичного максимуму сили зчеплення коліс з дорожнім покриттям, який відрізняється тим, що визначають умови зчеплення кожного колеса (однієї осі) з дорожнім покриттям, знаходять колесо з гіршими умовами зчеплення з дорожнім покриттям і відповідно до цього розподіляють гальмові зусилля таким чином, щоб забезпечити рівність гальмових сил між гальмовою колодкою і гальмовим диском обох коліс.
Текст
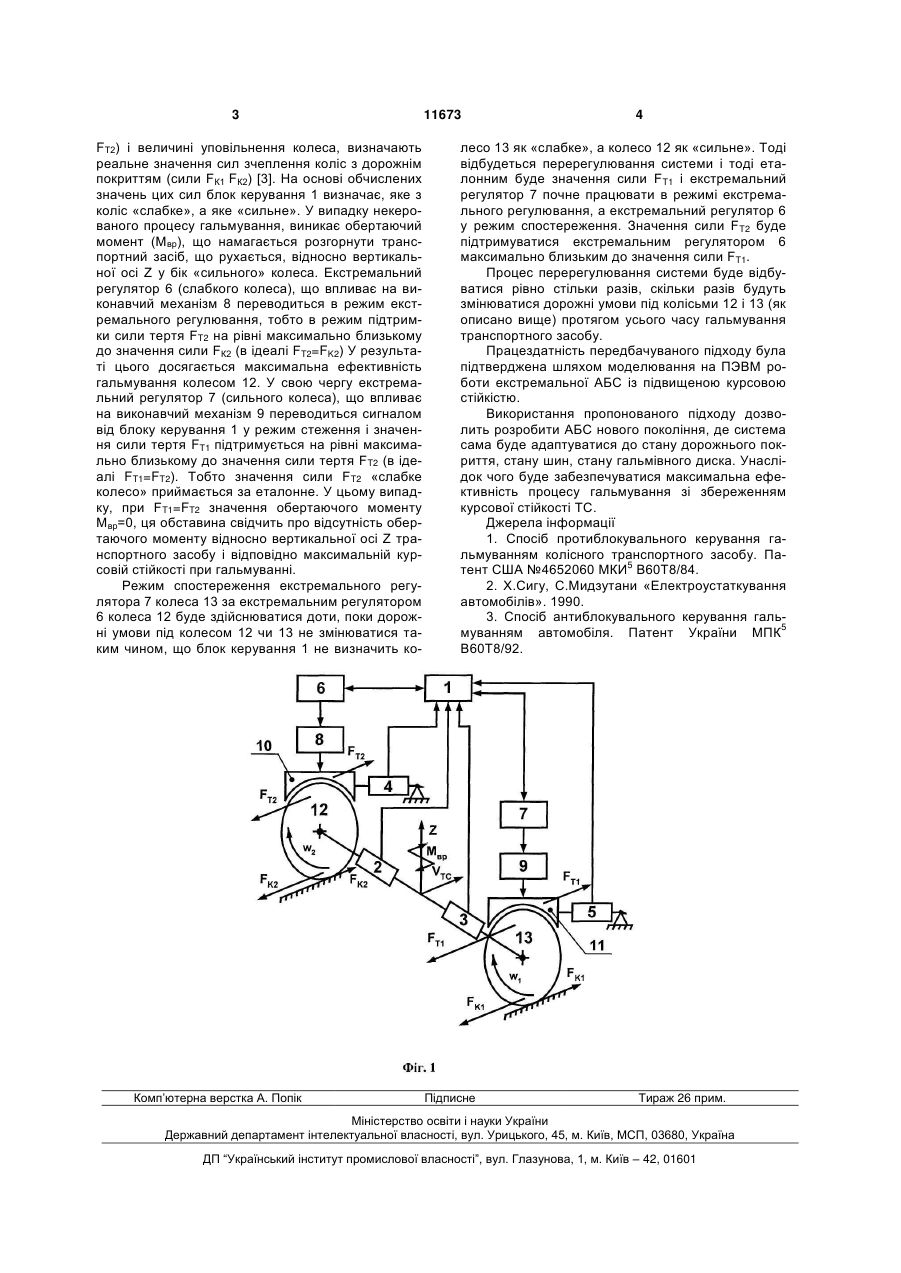
Спосіб антиблокувального керування гальмуванням транспортного засобу, при якому екстремальне автоматичне керування гальмуванням 3 FТ2) і величині уповільнення колеса, визначають реальне значення сил зчеплення коліс з дорожнім покриттям (сили FК1 FК2) [3]. На основі обчислених значень цих сил блок керування 1 визначає, яке з коліс «слабке», а яке «сильне». У випадку некерованого процесу гальмування, виникає обертаючий момент (Мвр), що намагається розгорнути транспортний засіб, що рухається, відносно вертикальної осі Z у бік «сильного» колеса. Екстремальний регулятор 6 (слабкого колеса), що впливає на виконавчий механізм 8 переводиться в режим екстремального регулювання, тобто в режим підтримки сили тертя FT2 на рівні максимально близькому до значення сили FК2 (в ідеалі FT2=FK2) У результаті цього досягається максимальна ефективність гальмування колесом 12. У свою чергу екстремальний регулятор 7 (сильного колеса), що впливає на виконавчий механізм 9 переводиться сигналом від блоку керування 1 у режим стеження і значення сили тертя FT1 підтримується на рівні максимально близькому до значення сили тертя FT2 (в ідеалі FT1=FT2). Тобто значення сили FT2 «слабке колесо» приймається за еталонне. У цьому випадку, при FT1=FT2 значення обертаючого моменту Мвр=0, ця обставина свідчить про відсутність обертаючого моменту відносно вертикальної осі Z транспортного засобу і відповідно максимальній курсовій стійкості при гальмуванні. Режим спостереження екстремального регулятора 7 колеса 13 за екстремальним регулятором 6 колеса 12 буде здійснюватися доти, поки дорожні умови під колесом 12 чи 13 не змінюватися таким чином, що блок керування 1 не визначить ко Комп’ютерна верстка А. Попік 11673 4 лесо 13 як «слабке», а колесо 12 як «сильне». Тоді відбудеться перерегулювання системи і тоді еталонним буде значення сили FT1 і екстремальний регулятор 7 почне працювати в режимі екстремального регулювання, а екстремальний регулятор 6 у режим спостереження. Значення сили FT2 буде підтримуватися екстремальним регулятором 6 максимально близьким до значення сили FT1. Процес перерегулювання системи буде відбуватися рівно стільки разів, скільки разів будуть змінюватися дорожні умови під колісьми 12 і 13 (як описано вище) протягом усього часу гальмування транспортного засобу. Працездатність передбачуваного підходу була підтверджена шляхом моделювання на ПЭВМ роботи екстремальної АБС із підвищеною курсовою стійкістю. Використання пропонованого підходу дозволить розробити АБС нового покоління, де система сама буде адаптуватися до стану дорожнього покриття, стану шин, стану гальмівного диска. Унаслідок чого буде забезпечуватися максимальна ефективність процесу гальмування зі збереженням курсової стійкості ТС. Джерела інформації 1. Спосіб протиблокувального керування гальмуванням колісного транспортного засобу. Патент США №4652060 МКИ5 В60Т8/84. 2. Х.Сигу, С.Мидзутани «Електроустаткування автомобілів». 1990. 3. Спосіб антиблокувального керування галь5 муванням автомобіля. Патент України МПК В60Т8/92. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of antiskid control of braking transportation means at high course stability of transportation means
Автори англійськоюBohatyrenko Kostiantyn Ivanovych
Назва патенту російськоюСпособ антиблокировочного управления торможением с повышенной курсовой стойкостью транспортного средства
Автори російськоюБогатыренко Константин Иванович
МПК / Мітки
МПК: B60T 8/88
Мітки: стійкістю, керування, підвищеною, антиблокувального, спосіб, гальмуванням, курсовою, засобу, транспортного
Код посилання
<a href="https://ua.patents.su/2-11673-sposib-antiblokuvalnogo-keruvannya-galmuvannyam-z-pidvishhenoyu-kursovoyu-stijjkistyu-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб антиблокувального керування гальмуванням з підвищеною курсовою стійкістю транспортного засобу</a>
Спосіб антиблокувального керування гальмуванням автомобіля
Номер патенту: 48538
Опубліковано: 15.08.2002
Автори: Левтеров Андрій Іванович, Кліменко Валерій Іванович, Нечитайло Юлія Анатоліївна, Богатиренко Костянтин Іванович
МПК: B60T 8/88
Мітки: автомобіля, спосіб, керування, антиблокувального, гальмуванням
Формула / Реферат:
Спосіб антиблокувального керування гальмуванням автомобіля, при якому на робочому органі створюють зусилля, менше за величиною, ніж зусилля, яке призводить до блокування колеса, який відрізняється тим, що екстремальне автоматичне керування гальмуванням автомобіля здійснюють шляхом вимірювання тангенційної складової сили тертя колеса і гальмової колодки при розгальмовуванні колеса в точці фактичного максимуму сили зчеплення колеса з...
Спосіб керування гальмом залізничного транспортного засобу
Номер патенту: 9537
Опубліковано: 17.10.2005
Автори: Ладик Юлія Еріковна, Осенін Юрій Іванович
МПК: B60T 7/00, B60T 11/10
Мітки: гальмом, спосіб, залізничного, транспортного, засобу, керування
Формула / Реферат:
Спосіб керування гальмом залізничного транспортного засобу, який включає зміну сили натискання східчастим чергуванням фаз відпущення й витримування тиску на постійному рівні, який відрізняється тим, що зусилля, яке передається на гальмові колодки за допомогою важільної передачі, змінюють із заданою частотою й тривалістю прикладання шляхом зміни величини тиску в гальмових циліндрах.
Виконавчий механізм рульового керування транспортного засобу

Номер патенту: 63416
Опубліковано: 15.01.2004
Автори: Антонова Галина Володимирівна, Жуковський Віктор Анатолійович, Петров Віктор Олексійович, Просвірнін Віктор Іванович, Лубяний Микола Миколайович, Крилов Володимир Вікторович, Бондар Андрій Миколайович
МПК: B62D 5/10
Мітки: виконавчий, механізм, рульового, транспортного, керування, засобу
Формула / Реферат:
1. Виконавчий механізм рульового керування транспортного засобу, який має гідроциліндр двосторонньої дії, поршень з ущільнювальними кільцями та штоком, кришки, патрубки для підводу робочої рідини, який відрізняється тим, що поршень має кільцеподібні магніти, які установлені на бічних його поверхнях.2. Виконавчий механізм за п. 1, який відрізняється тим, що магніти закріплені на бічних поверхнях через немагнітні шайби.3....
Пристрій для керування акселератором транспортного засобу
Номер патенту: 873
Опубліковано: 16.07.2001
Автори: Сердюк Лев Валерійович, Сердюк Валерій Дмитрович
МПК: B60K 31/00
Мітки: засобу, акселератором, пристрій, керування, транспортного
Формула / Реферат:
Пристрій для керування акселератором транспортного засобу, що містить, розташований у корпусі фіксатор, зв'язаний з педалями акселератора, гальма та зчеплення, який відрізняється тим, що фіксатор зроблений у вигляді електромагнітної катушки, на серцевині якої встановлена упорна ступиця з можливістю контакту з повзуном, який зв'язаний за допомогою тяги з педаллю акселератора, а в корпусі фіксатора встановлена каретка, на якій закріплена...
Пристрій автоматичного керування блокуванням диференціала транспортного засобу
Номер патенту: 4848
Опубліковано: 15.02.2005
Автори: Верба Юрій Валентинович, Верба Артем Юрійович, Нікітін Володимир Олександрович
МПК: B60K 17/00
Мітки: пристрій, транспортного, засобу, автоматичного, диференціала, блокуванням, керування
Формула / Реферат:
Пристрій автоматичного керування блокуванням диференціала транспортного засобу, що містить систему реагування на заданий кут повороту транспортного засобу з датчиком кута повороту, зв'язаним з елементом рульового керування, керуючий елемент, зв'язаний із силовим циліндром муфти блокування диференціала і з джерелом живлення, два тахометричних датчики, зв'язаних з відповідними ведучими колесами транспортного засобу і електрично зв'язані з...
Попередній патент: Муфта
Наступний патент: Спосіб оцінки адаптаційних можливостей організму
Випадковий патент: Спосіб прогнозування ризику розвитку гіпертонічної хвороби