Спосіб керування натягом по ширині штаби
Номер патенту: 14504
Опубліковано: 15.05.2006
Автори: Островерхов Микола Якович, Попович Микола Гаврилович
Формула / Реферат
Спосіб керування натягом по ширині штаби, в якому вимірюють розподіл натягу по ширині штаби, обчислюють на його основі керуючі зусилля, якими діють на штабу, який відрізняється тим, що на штабу діють керуючими зусиллями у площині штаби без механічного контакту вздовж її продовжної осі, причому керуючі зусилля обчислюють відносно середньоарифметичного значення натягу штаби, яке попередньо розраховують.
Текст
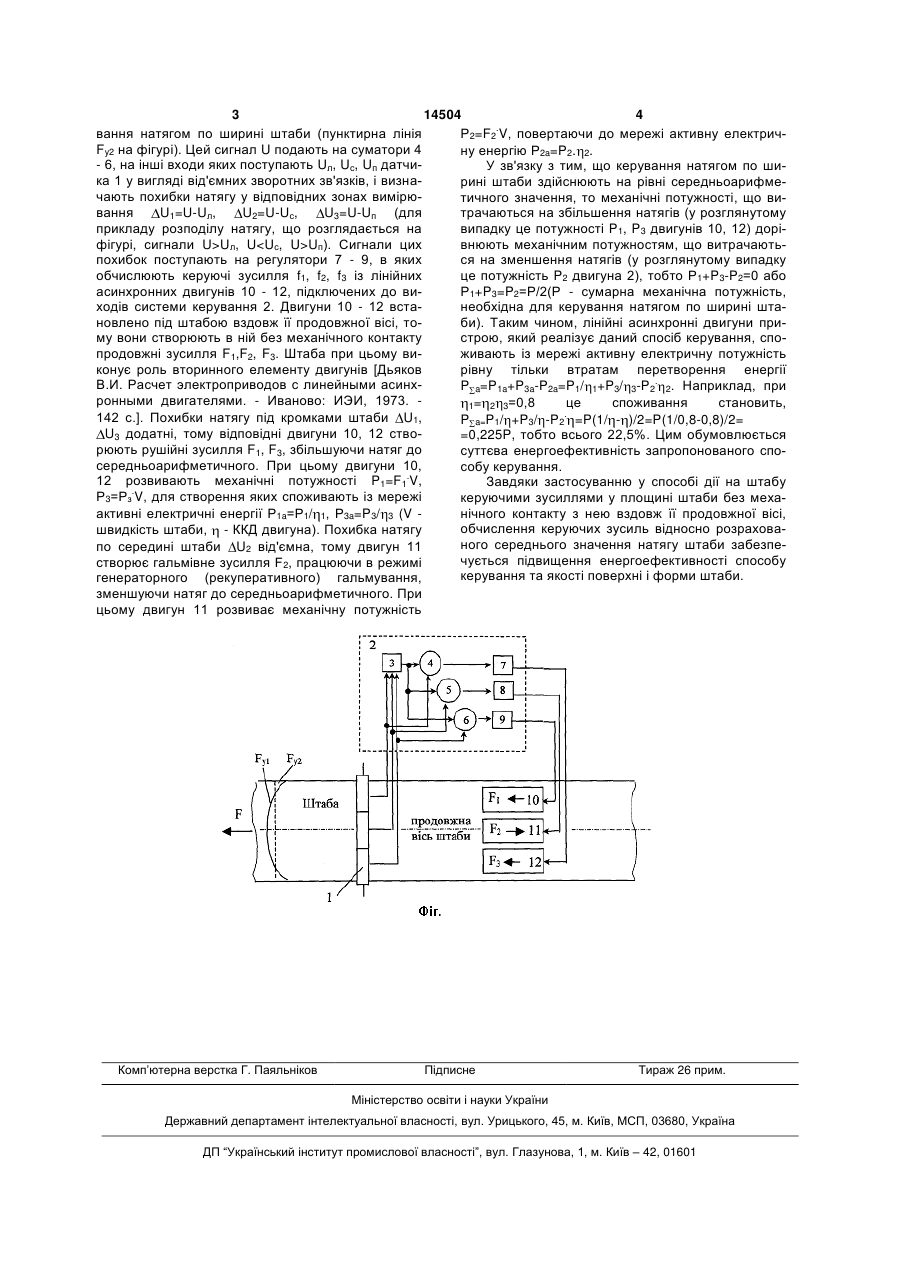
Спосіб керування натягом по ширині штаби, в якому вимірюють розподіл натягу по ширині штаби, обчислюють на його основі керуючі зусилля, якими діють на штабу, який відрізняється тим, що на штабу діють керуючими зусиллями у площині штаби без механічного контакту вздовж її продовжної осі, причому керуючі зусилля обчислюють відносно середньоарифметичного значення натягу штаби, яке попередньо розраховують. (19) (21) u200511322 (22) 29.11.2005 (24) 15.05.2006 (46) 15.05.2006, Бюл. № 5, 2006 р. (72) Попович Микола Гаврилович, Островерхов Микола Якович (73) НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ "КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ" 3 14504 4 вання натягом по ширині штаби (пунктирна лінія Р2=F2.V, повертаючи до мережі активну електричFy2 на фігурі). Цей сигнал U подають на суматори 4 ну енергію Р2a=P2. 2. - 6, на інші входи яких поступають Uл, Uс, Uп датчиУ зв'язку з тим, що керування натягом по шика 1 у вигляді від'ємних зворотних зв'язків, і визнарині штаби здійснюють на рівні середньоарифмечають похибки натягу у відповідних зонах вимірютичного значення, то механічні потужності, що вивання U1=U-Uл, U2=U-Uс, U3=U-Uп (для трачаються на збільшення натягів (у розглянутому прикладу розподілу натягу, що розглядається на випадку це потужності P1, P3 двигунів 10, 12) доріфігурі, сигнали U>Uл, UUп). Сигнали цих внюють механічним потужностям, що витрачаютьпохибок поступають на регулятори 7 - 9, в яких ся на зменшення натягів (у розглянутому випадку обчислюють керуючі зусилля f1, f2, f3 із лінійних це потужність P2 двигуна 2), тобто Р1+P3-P2=0 або асинхронних двигунів 10 - 12, підключених до виР1+P3=P2=P/2(Р - сумарна механічна потужність, ходів системи керування 2. Двигуни 10 - 12 встанеобхідна для керування натягом по ширині штановлено під штабою вздовж її продовжної вісі, тоби). Таким чином, лінійні асинхронні двигуни приму вони створюють в ній без механічного контакту строю, який реалізує даний спосіб керування, спопродовжні зусилля F1,F2, F3. Штаба при цьому виживають із мережі активну електричну потужність конує роль вторинного елементу двигунів [Дьяков рівну тільки втратам перетворення енергії В.И. Расчет электроприводов с линейными асинхP a=P1a+P3a-P2a=P1/ 1+P3/ 3-P2. 2. Наприклад, при ронными двигателями. - Иваново: ИЭИ, 1973. це споживання становить, 1= 2 3=0,8 142 с.]. Похибки натягу під кромками штаби U1, P a=P1/ +P3/ -P2. =P(1/ - )/2=P(1/0,8-0,8)/2= U3 додатні, тому відповідні двигуни 10, 12 ство=0,225P, тобто всього 22,5%. Цим обумовлюється рюють рушійні зусилля F1, F3, збільшуючи натяг до суттєва енергоефективність запропонованого спосередньоарифметичного. При цьому двигуни 10, собу керування. 12 розвивають механічні потужності P1=F1.V, Завдяки застосуванню у способі дії на штабу . Р3=Рз V, для створення яких споживають із мережі керуючими зусиллями у площині штаби без мехаактивні електричні енергії Р1a=Р1/ 1, Р3a=P3/ 3 (V нічного контакту з нею вздовж її продовжної вісі, обчислення керуючих зусиль відносно розраховашвидкість штаби, - ККД двигуна). Похибка натягу ного середнього значення натягу штаби забезпепо середині штаби U2 від'ємна, тому двигун 11 чується підвищення енергоефективності способу створює гальмівне зусилля F2, працюючи в режимі керування та якості поверхні і форми штаби. генераторного (рекуперативного) гальмування, зменшуючи натяг до середньоарифметичного. При цьому двигун 11 розвиває механічну потужність Комп’ютерна верстка Г. Паяльніков Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of tension control on the strip width
Автори англійськоюPopovych Mykola Havrylovych
Назва патенту російськоюСпособ управления натяжением по ширине полосы
Автори російськоюПопович Николай Гаврилович
МПК / Мітки
МПК: B21B 39/00
Мітки: спосіб, натягом, ширини, керування, штаби
Код посилання
<a href="https://ua.patents.su/2-14504-sposib-keruvannya-natyagom-po-shirini-shtabi.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування натягом по ширині штаби</a>
Пристрій для регулювання міжвалкового зазору по ширині штаби
Номер патенту: 46259
Опубліковано: 15.05.2002
Автори: Андрусевич Дмитро Анатолійович, Ніколаєв Віктор Олександрович
МПК: B21B 31/00
Мітки: регулювання, ширини, зазору, пристрій, міжвалкового, штаби
Формула / Реферат:
Пристрій для регулювання міжвалкового зазору по ширині штаби, що прокатують, включає в себе робочі й опорні валки з подушками, гідроциліндри для противигину робочих валків, встановлені в подушках нижнього робочого валка, систему подачі рідини високого тиску, який відрізняється тим, що торці опорних ділянок плунжерів виконані з площею поперечного перерізу меншою площі поперечного перерізу самого плунжера, а довжина опорної ділянки плунжера...
Спосіб намотування штаби на барабан моталки в печі
Номер патенту: 48850
Опубліковано: 15.08.2002
Автори: Білобров Юрій Миколайович, Осокін Анатолій Андрійович, Тіщенко Андрій Миколайович, Єршов Валентин Олександрович
МПК: B21C 47/02
Мітки: моталки, намотування, печі, спосіб, штаби, барабан
Формула / Реферат:
Спосіб намотування штаби на барабан моталки в печі, що складається з подачі штаби задавальними роликами у проріз барабана моталки, розгону барабана з наступним натягом штаби до її контакту з роликом, що відхиляє, який відрізняється тим, що після згаданого контакту здійснюють підйом штаби на ділянці між задавальними роликами i барабаном моталки, переміщаючи ролик, що відхиляє.
Спосіб намотування штаби на барабан моталки в печі
Номер патенту: 75750
Опубліковано: 15.05.2006
Автори: Єршов Валентин Олександрович, Богданова Людмила Василівна, Тіщенко Андрій Миколайович, Панченко Віктор Миколайович
МПК: B21C 47/02, B21C 47/26
Мітки: моталки, спосіб, штаби, печі, барабан, намотування
Формула / Реферат:
Спосіб намотування штаби на барабан моталки в печі, при якому здійснюють подачу штаби у проріз нерухомого барабана моталки з наступним прикладанням до нього робочого крутильного моменту, вплив на штабу з боку привідного відхильного ролика, і формування витків рулону з перекриттям ними переднього кінця штаби, розташованої у прорізі барабана, і накладенням кожного витка на ділянку барабана з прорізом, який відрізняється тим, що в процесі...
З’єднання деталей з натягом і спосіб його здійснення
Номер патенту: 62373
Опубліковано: 15.12.2003
Автори: Кулюкін Сергій Васильович, Сігбатулін Олександр Томович, Малиновський Микола Григорович, Андреєв Арнольд Георгійович, Оборський Іван Леонідович, Арпентьєв Борис Михайлович, Носік Віктор Сергійович, Кантур В'ячеслав Григорович, Зенкін Анатолій Семенович
МПК: B23P 11/02, B23P 19/02
Мітки: натягом, з'єднання, здійснення, деталей, спосіб
Формула / Реферат:
1. З'єднання деталей з натягом, що містить бандаж з гребенем та центр, бандаж усередині посадкового отвору має два буртики - перший у площині гребеня та другий - з іншого боку, центр має посадкову поверхню з гострою кромкою з боку вхідної частини, яке відрізняється тим, що перший буртик розміщений від другого на відстані, яка менше довжини посадки на величину двостороннього осьового натягу, причому перший буртик має вертикальну твірну, а...
Спосіб керування реверсивним станом з моталками в печах

Номер патенту: 67367
Опубліковано: 15.06.2004
Автори: Барабаш Андрій Володимирович, Леонідов-Канєвський Євген Володимирович, Білобров Юрій Миколайович, Єлецьких Володимир Іванович, Стеч Володимир Станіславович, Гагарін Павло Павлович
МПК: B21B 37/48
Мітки: моталками, печах, спосіб, реверсивним, керування, станом
Формула / Реферат:
Спосіб керування реверсивним станом з моталками в печах, який включає зміну швидкостей усіх попередніх або всіх наступних клітей по відхиленню натягу штаби в конкретному міжклітьовому проміжку від заданого значення, обумовленого результатом послідовної процедури, що включає вимір на кожній кліті горизонтальної сили притиснення подушок робочих валків до стійок станини і зусилля прокатки, обчислення, при першому заповненні клітей металом,...
Попередній патент: Блок насадки тепломасообмінного апарата
Наступний патент: Установка для культивування мікроорганізмів
Випадковий патент: Спосіб одержання усередненої розгортки з бокових поверхонь колодки за допомогою шаблонів