Механізм архімедової спіралі
Номер патенту: 25486
Опубліковано: 30.10.1998
Автори: Савченко Сергей Леонидович, Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович

Формула / Реферат
Механізм Архімедової спіралі, що має утримуючий корпус, зубчате колесо, прямокутний шток, який відрізняється тим, що у корпусі твердо посаджено конічне колесо, яке входить до зачеплення з другим конічним колесом, поєднане водночас із ведучим валом за допомогою прямокутного штока та утворюючого гвинтове з'єднання у своєму геометричному центрі з гвинтом, який утворює поступову кінематичну пару з ведучим валом.
Текст
Винахід стосується машино- та приладобудівної промисловості, стосовно тих механізмів, які використовуються для якісного відтворення кривих. Відомі конструкції механізмів Архімедової спіралі (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиноведение, 1987. - Фиг. на с.24), в якій Архімедову спіраль описує центр шарніра, сполучених між собою шатунів п'ятиланцюгового важільного механізму. Суттєвим недоліком цього механізму є складність конструкції механізму в цілому; необхідність існування додаткового ведучого механізму, щоб узгодити рух вхідних ланок (кількість ступенів вільності цього механізму рівняється двом). Остання обставина ще більш ускладнює конструкцію механізму в цілому. Іншим технічним рішенням є пристрій для відтворення Архімедової спіралі (фиг.г. с.24), що прийнято за прототип. Механізм містить у собі циліндричне зубчасте колесо, яке рухомо насаджено на прямокутний шток. Шток одним кінцем утворює поступальну кінематичну пару з корпусом механізму, а другим кінцем контактує з кулачком. Профіль кулачка є з одного боку - зубчаста рейка, з другого - наклонна площина. Зубчаста рейка взаємодіє з циліндричним зубчастим колесом, а наклонна площина - з роликом, що рухомо насаджений на корпус механізму. При поступальному русі кулачка, останній передаватиме свій рух усім ланкам механізму, в тому числі також і зубчастому колесу. Завдяки прямолінійному профілю кулачка забезпечується незмінне відношення швидкості переміщення та обертання зубчастого колеса. Нерухома точка корпусу, обрана на напрямку руху прямокутного штоку описує Архімедову спіраль, яка твердо закріплена на циліндричному зубчастому колесі. Такий механізм має наступні важливі недоліки: 1. Багатоланцюговість і складність конструкції, що викликає велику масу та габаритні розміри. 2. Існування кулачкового механізму з поступально рухомим кулачком, якому властиві низька зносостійкість, недовговічність та інше. 3. Обмеження можливостей механізму відносно довжини відтворювання Архімедової спіралі. 4. Низька точність відтворення Архімедової,спіралі, внаслідок копіювання на ній помилок виготовлення кулачка. 5. Необхідність використання додаткового механізму, який забезпечить рух кулачка, ще більше ускладнює конструкцію механізму, збільшуючи масу та габаритні розміри. До основи винаходу поставлена задача скласти принципово новий механізм Архімедової спіралі, з використанням планетарної конічної передачі разом із гвинтовим механізмом, що дозволяє спростити конструкцію механізму, підвищити надійність, довговічність і точність відтворення спіралі, зменшити металоємність. Поставлена мета досягається тим, що корпус механізму виготовлений у вигляді конічного колеса. Такий саме вигляд має циліндричне зубчасте колесо прототипу. Прямокутний шток утворює шарнірне сполучення з обома конічними колесами, які зачеплені між собою. Рухоме зубчасте колесо в своєму геометричному центрі утворює гвинтове з'єднання з гвинтом, утворюючи водночас поступову кінематичну пару з прямокутним штоком. У такому механізмі будь-яка точка гвинта описує Архімедову спіраль, що математично доводиться слідуючим. Відомо, якщо відрізок прямої обертається навколо нерухомої точки, та на цьому відрізку водночас рухається точка за законом, прямопропорційно куту обертання, тоді в абсолютному русі вона відтворює криву, яка має назву "Архімедова спіраль" (Выгодский М.Я. Справочник по высшей математике. - М.: Наука, 1964. - С.113). Запропонований механізм повторює всі ці рухи: при обертанні штока разом із ним повертається гвинт. Завдяки існуванню гвинтового з'єднання між гвинтом і конічним колесом, відносний кут повороту якого прямопропорційний куту повороту штока, гвинт отримує прямолінійне переміщення відносно центра обертання штоку. Отже, будь-яка точка гвинта описує Архімедову спіраль. Відомо технічне рішення (Кожевников С.Н., Есипенко Я.И., Раскин Я.М. Механизмы. - М.: Машиноведение, 1976. - Рис.3.120, с.200), в якому корпус виготовлений у вигляді нерухомого конічного колеса, з яким входить у зачеплення рухоме зубчасте колесо (сателіт), яке утворює шарнірне сполучення з водилом, закріпленим твердо з ведучим валом механізму. Цей механізм використовується як передаючий механізм. Відоме також гвинтове з'єднання (рис.10.66 с.611), призначене для перетворення обертального руху на поступальний і навпаки. Проте авторам невідомі технічні рішення, у яких конічна передача враз з гвинтовим механізмом набуває нові функціональні можливості. Технічний наслідок розв'язання цієї задачі, це можливість відтворення Архімедової спіралі будь-якої довжини, спрощення конструкції, підвищення та довголіття праці, а також точності відтворення спіралі. Коли заявлене рішення порівнюється не тільки з прототипом, але і з іншими технічними рішеннями, не знайдене рішення, яке містить у собі східні прикмети, отже воно відповідає рисі "новизна". Сутність заявленого розв'язання пояснюється рисунком (фіг.). Механізм складається з корпуса 1, у якому нерухомо посаджено конічне колесо 2. Із колесом 2 входять до зачеплення друге конічне колесо 3, яке входить до зачеплення з водилом 4. Переміщення колеса 3 удовж його геометричної осі попереджається (виключається) за допомогою пружинного кільця 5. Водило 4 твердо посаджено на вал 6. Останній рухомо посаджений до корпуса 1 за допомогою підшипників. У конічному колесі 3 виконаний гвинтовий отвір, до якого увіходить гвинт 7. Вдовж вала 6 виконаний отвір до якого входить гвинт 7, складаючи поступову кінематичну пару. На валу 6 закріплений палець 8, який входить до продольної канавки, виконаній на гвинті 7. Механізм працює так. Рух від зовнішнього джерела переходить до валу 6. Від валу 6 рух переходить до водила 4. Разом з водилом 4 обертається конічне колесо 3, яке водночас обкатується вздовж нерухомого колеса 2, повертаючись біля своєї геометричної осі. Цей відносний оберт за допомогою гвинтового з'єднання перетворюється у поступове переміщення гвинта 7 з одночасним його обертом разом з валом 6. Галузь вживання заявленого механізму машино та приладобудування, зокрема у станках, які займаються виготовленням кулачків, профільованих Архімедовою спіраллю, патронів металоріжучих станків та інш.
ДивитисяДодаткова інформація
Автори англійськоюAmbartsumiants Robert Vachahanovych, Ambartsumiants Karen Robertovych
Автори російськоюАмбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК / Мітки
МПК: F16H 21/04, F16H 1/28
Мітки: механізм, спіралі, архімедової
Код посилання
<a href="https://ua.patents.su/2-25486-mekhanizm-arkhimedovo-spirali.html" target="_blank" rel="follow" title="База патентів України">Механізм архімедової спіралі</a>
Механізм переміщення колеса транспортного засобу у вертикальній поздовжій площині
Номер патенту: 815
Опубліковано: 01.01.1993
Автор: Москаль Григорій Євдокимович
МПК: B62D 53/00
Мітки: колеса, механізм, переміщення, поздовжій, засобу, площині, транспортного, вертикальний
Формула / Реферат:
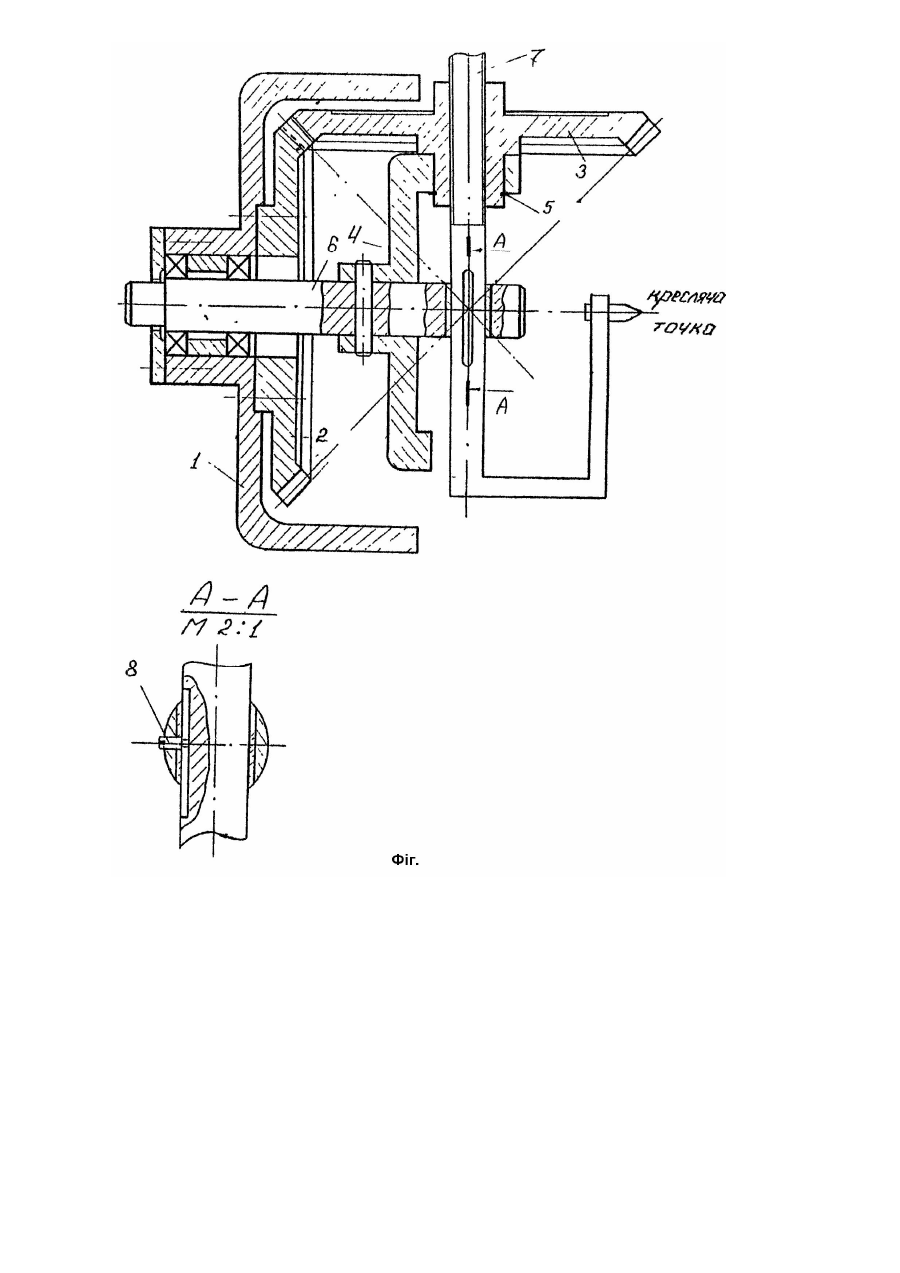
Механизм перемещения колеса транспортного средства в вертикальной продольной плоскости, содержащий приводной винт, закрепленную на оси транспортного средства с возможностью вращения в вертикальной плоскости двуплечую стойку, на одном конце которой установлено колесо, отличающийся тем, что, с целью упрощения конструкции и расширения эксплуатационных возможностей, устройство снабжено установленным на приводном валу вильчатым ползуном,...
Механізм подання гірничої машини
Номер патенту: 12171
Опубліковано: 25.12.1996
Автори: Аккерман Фрідріх Маркович, Пальчак Микола Іванович, Агранат Арон Рувімович, Демяненко Михайло Якович, Юргілевич Володимир Антонович, Пащенко Володимир Лазаревич
МПК: E21C 29/00
Мітки: механізм, подання, машини, гірничої
Формула / Реферат:
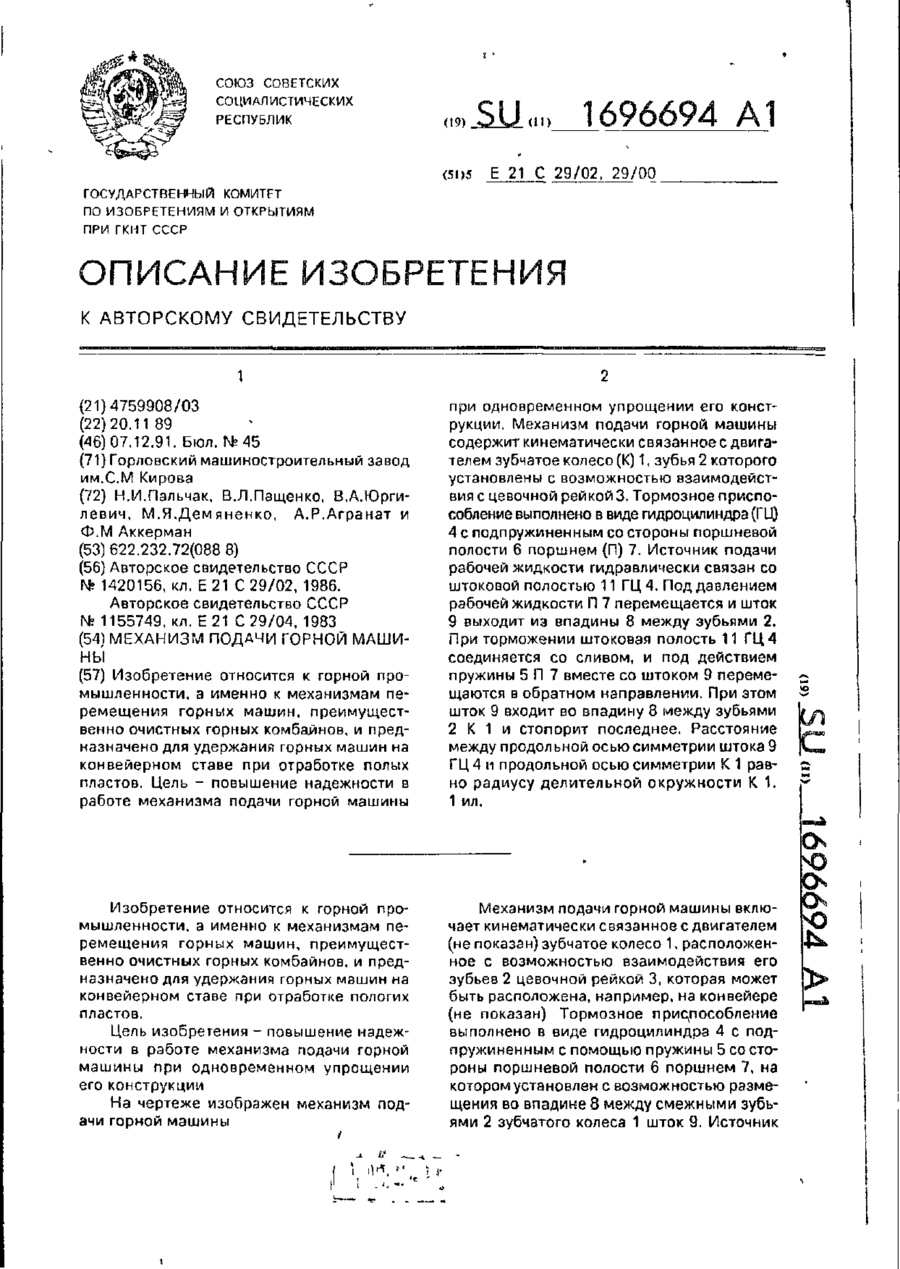
Механизм подачи горной машины, включающий кинематически связанное с двигателем зубчатое колесо, зубья которого установлены с возможностью взаимодействия с цевочной рейкой, тормозное приспособление в виде гидроцилиндра с подпружиненным со стороны поршневой полости поршнем, на котором соосно установлен с возможностью размещения во впадине между смежными зубьями зубчатого колеса шток, и гидравлически связанный со штоковой полостью...
Зубчато-важільний планетарний кривошинно-повзунний механізм
Номер патенту: 6139
Опубліковано: 29.12.1994
Автор: Чеславський Володимир Федірович
МПК: F16H 21/14
Мітки: кривошинно-повзунний, планетарний, механізм, зубчато-важільний
Формула / Реферат:
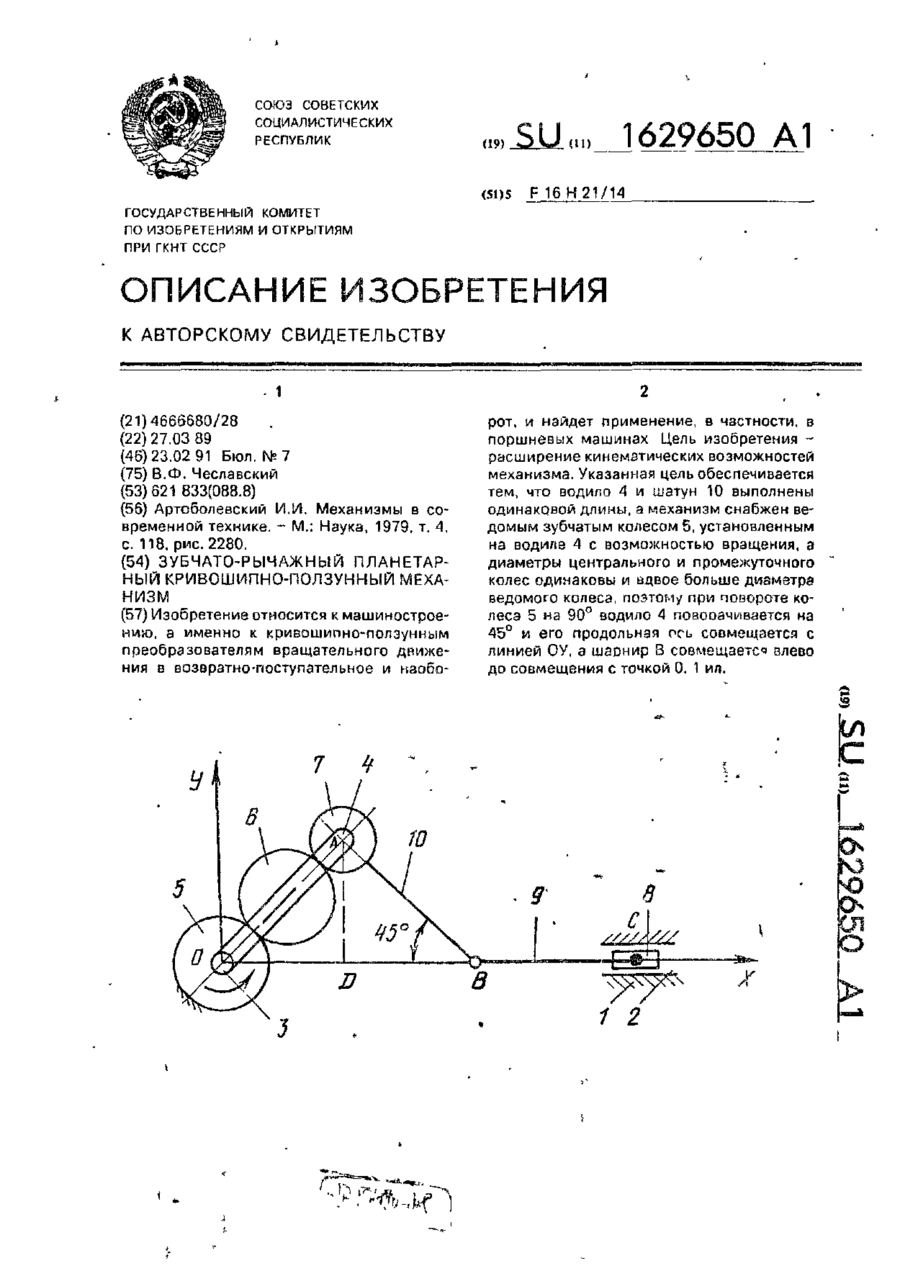
Зубчато-рычажный планетарный кривошипно-ползунный механизм, содержащий основание с прямолинейной направляющей, ведущий вал с жестко закрепленным на ней водилом, ось вращения которого пересечена с продольной осью направляющей, закрепленное на основании зубчатое колесо, ось которого совмещена с осью вращения ведущего вала, установленное на водило с возможностью вращения промежуточное зубчатое колесо, входящее в зацепление с центральным...
Пристрій для гнуття по спіралі профільних заготовок

Номер патенту: 16574
Опубліковано: 29.08.1997
Автор: Кікта Ярослав Йосифович
МПК: B21D 11/06
Мітки: пристрій, гнуття, заготовок, профільних, спіралі
Механізм обертання платформи будівельної машини
Номер патенту: 7775
Опубліковано: 26.12.1995
Автори: Анохін Юрій Олександрович, Ведмедєв Анатолій Федорович
МПК: E02F 9/08
Мітки: механізм, обертання, платформи, будівельної, машини
Формула / Реферат:
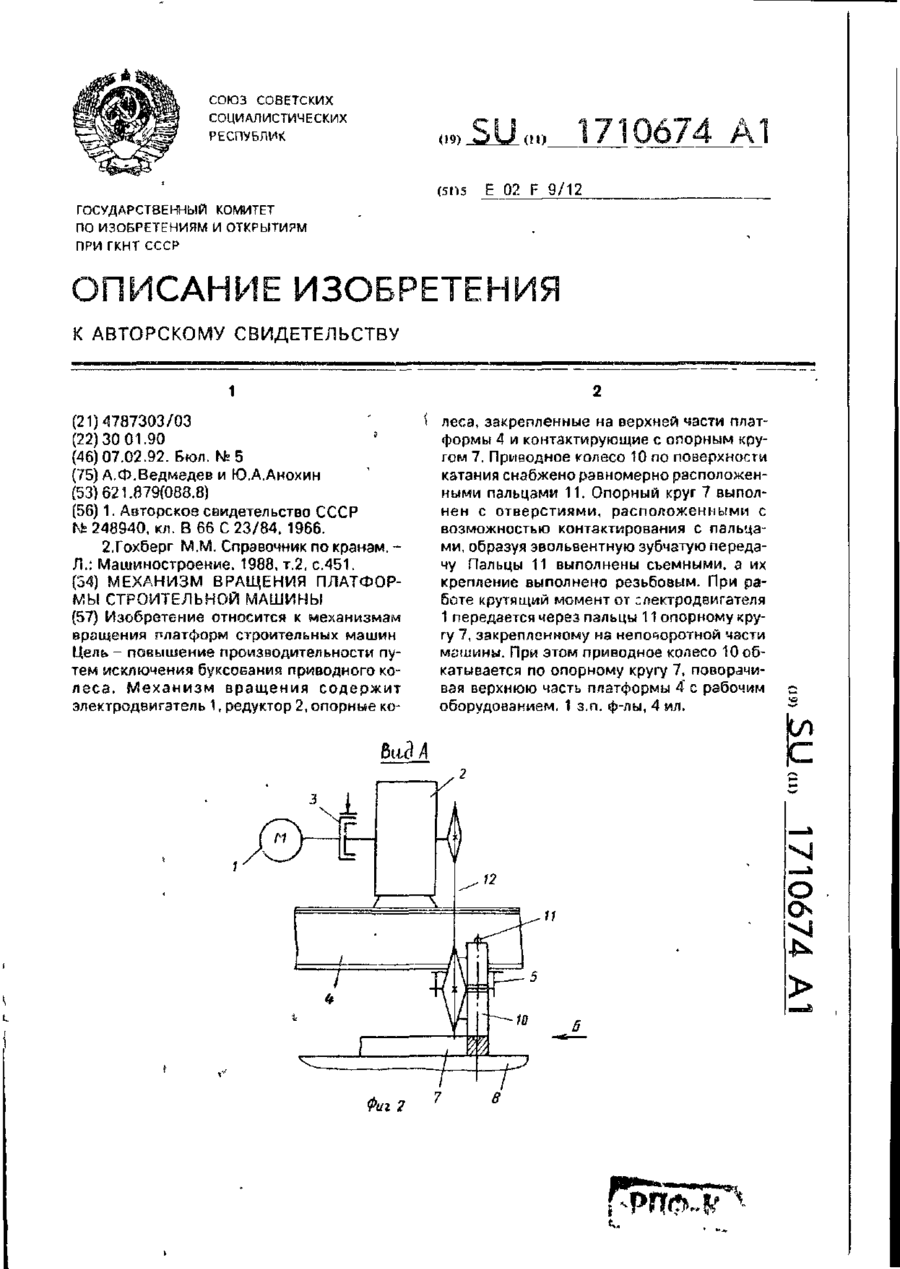
1. Механизм вращения платформы строительной машины, включающий опорный круг и соединенный с приводным колесом привод, отличающийся тем, что, с целью повышения производительности путем исключения буксования приводного колеса, приводное колесо по поверхности катания имеет равномерно закрепленные пальцы, а опорный круг выполнен с отверстиями, расположенными с возможностью контактирования с пальцами, образуя эвольвентную зубчатую...
Попередній патент: Спосіб лікування хвороби гіршпрунга
Наступний патент: Спосіб прокатування зливків на обтискному стані
Випадковий патент: Пристрій буксирний