Адаптивна система керування
Номер патенту: 26903
Опубліковано: 10.10.2007
Автори: Сиротська Ольга Олександрівна, Гавриленко Олег Іванович, Тарасенко Олексій Володимирович, Мирна Олена Володимирівна
Формула / Реферат
Адаптивна система керування, що містить адаптивний регулятор, який складається з трьох суматорів, перший суматор з'єднаний паралельно з інтегратором і диференціатором і послідовно з другим суматором; виходи інтегратора і диференціатора з'єднані з другим суматором, який послідовно з'єднаний із блоком множення, яка відрізняється тим, що в систему введений датчик збурювальної дії, з'єднаний із третім суматором, вихід якого з'єднаний із першим суматором; у адаптивний регулятор введений мікроконтролер, вхід якого з'єднаний із першим суматором і диференціатором, а вихід - із блоком множення.
Текст
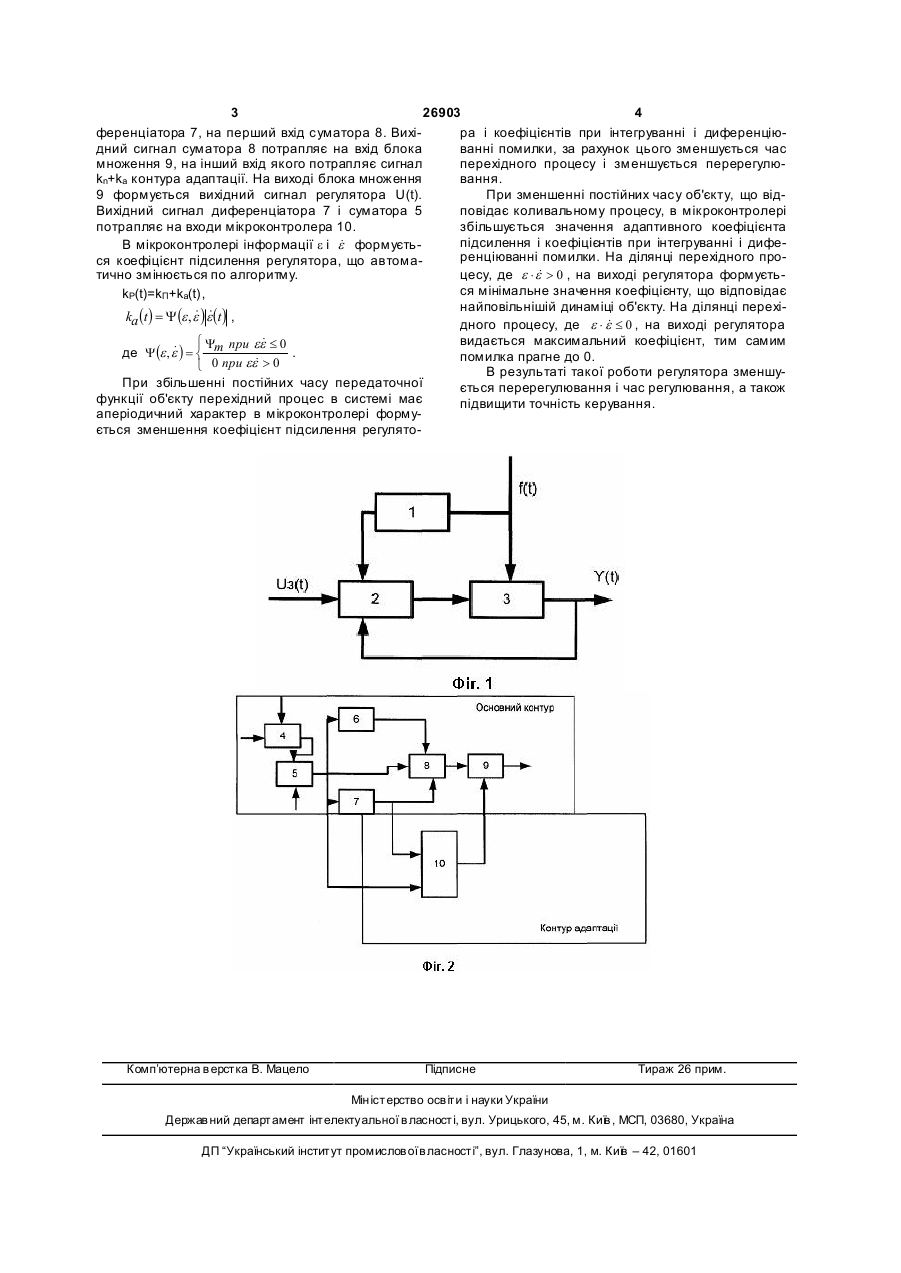
Адаптивна система керування, що містить адаптивний регулятор, який складається з трьох 3 26903 4 ференціатора 7, на перший вхід суматора 8. Вихіра і коефіцієнтів при інтегруванні і диференціюдний сигнал суматора 8 потрапляє на вхід блока ванні помилки, за рахунок цього зменшується час множення 9, на інший вхід якого потрапляє сигнал перехідного процесу і зменшується перерегулюkn+ka контура адаптації. На виході блока множення вання. 9 формується вихідний сигнал регулятора U(t). При зменшенні постійних часу об'єкту, що відВихідний сигнал диференціатора 7 і суматора 5 повідає коливальному процесу, в мікроконтролері потрапляє на входи мікроконтролера 10. збільшується значення адаптивного коефіцієнта підсилення і коефіцієнтів при інтегруванні і дифе& В мікроконтролері інформації e і e формуєтьренціюванні помилки. На ділянці перехідного прося коефіцієнт підсилення регулятора, що автоматично змінюється по алгоритму. цесу, де e × e& > 0 , на виході регулятора формується мінімальне значення коефіцієнту, що відповідає kP(t)=kП+kа(t), найповільнішій динаміці об'єкту. На ділянці перехі& & ka (t ) = Y (e , e ) e (t ) , & дного процесу, де e × e £ 0 , на виході регулятора видається максимальний коефіцієнт, тим самим ì Ym при ee £ 0 & & де Y (e , e ) = í . помилка прагне до 0. î 0 при ee& > 0 В результаті такої роботи регулятора зменшуПри збільшенні постійних часу передаточної ється перерегулювання і час регулювання, а також функції об'єкту перехідний процес в системі має підвищити точність керування. аперіодичний характер в мікроконтролері формується зменшення коефіцієнт підсилення регулято Комп’ютерна в ерстка В. Мацело Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive control system
Автори англійськоюHavrylenko Oleh Ivanovych, Myrna Olena Volodymyrivna, Tarasenko Oleksii Volodymyrovych, Syrotska Olga Oleksandrivna
Назва патенту російськоюАдаптивная система управления
Автори російськоюГавриленко Олег Иванович, Мирная Елена Владимировна, Тарасенко Алексей Владимирович, Сиротская Ольга Александровна
МПК / Мітки
МПК: G05B 13/02
Мітки: керування, система, адаптивна
Код посилання
<a href="https://ua.patents.su/2-26903-adaptivna-sistema-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Адаптивна система керування</a>
Система керування об’єктом із запізнюванням
Номер патенту: 34774
Опубліковано: 15.03.2001
Автори: Ткачов Роман Юрійович, Жиляков Віктор Іванович
МПК: G05B 13/02
Мітки: об'єктом, запізнюванням, керування, система
Формула / Реферат:
Система керування об'єктом із запізнюванням, що містить послідовно сполучені: перший елемент порівняння, перший регулятор, об'єкт із запізнюванням, другий елемент порівняння, а також залучену до виходу першого регулятора модель чистого запізнювання і залучену до входу другого елемента порівняння першу модель інерційної частини об'єкта, яка відрізняється тим, що вона додатково обладнана другою моделлю інерційної частини об'єкта, другим...
Адаптивна резервована система
Номер патенту: 51152
Опубліковано: 15.11.2002
Автори: Дергачов Володимир Андрійович, Доценко Наталія Володимирівна, Кулік Анатолій Степанович
МПК: G06F 11/18
Мітки: система, резервована, адаптивна
Формула / Реферат:
Адаптивна резервована система, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, двійковий лічильник, перший і другий елементи АБО, причому вихід і -го блока, що резервується з'єднаний з першим входом і-го елемента І, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І, вихід якого з'єднаний з і-им входом першої групи входів порогового елемента, вихід порогового...
Адаптивна система управління
Номер патенту: 11808
Опубліковано: 16.01.2006
Автори: Рудико Оксана Вікторівна, Симонов Володимир Федорович, Бандура Іван Миколайович, Шемшур Микола Володимирович
МПК: G05B 13/00
Мітки: управління, адаптивна, система
Формула / Реферат:
1. Адаптивна система управління, що містить перший блок інтеграторів, перший блок підсилювачів, об'єкт управління, другий блок інтеграторів, яка відрізняється тим, що в систему введено обчислювач, з'єднаний з виходом пристрою узгодження через блок аналого-цифрових перетворювачів та з входом другого блока інтеграторів через блок цифро-аналогових перетворювачів.2. Адаптивна система управління за п. 1, яка відрізняється тим, що пристрій...
Система керування
Номер патенту: 61030
Опубліковано: 15.10.2003
Автори: Дрючин Віктор Гаврилович, Жиляков Віктор Іванович, Ткачук Денис Ярославович
МПК: G05B 13/00
Формула / Реферат:
Система керування, до складу якої входить об'єкт керування, що складається з «n» послідовно з'єднаних інерційних ланок, моделі об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а входом, що віднімає, - до виходу об'єкта керування, зворотну модель, релейний елемент, два підсилювачі, яка відрізняється тим, що додатково введені «n+1» квадраторів, інтегратор і блок...
Система керування
Номер патенту: 59845
Опубліковано: 15.09.2003
Автори: Дрючин Віктор Гаврилович, Ткачук Денис Ярославович, Жиляков Віктор Іванович
МПК: G05B 13/00
Формула / Реферат:
Система керування, що містить об'єкт керування, що складається з n послідовно з'єднаних інерційних ланок, модель об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а виходом, що віднімає, - до виходу об'єкта керування, зворотну модель об'єкта керування, два підсилювачі, яка відрізняється тим, що на вхід, що підсумовує, першого підсилювача надходить сигнал завдання, а n його...
Попередній патент: Гумова суміш
Наступний патент: Рекламний пристрій
Випадковий патент: Спосіб автоматичного регулювання парової турбіни