Система керування
Номер патенту: 61030
Опубліковано: 15.10.2003
Автори: Ткачук Денис Ярославович, Дрючин Віктор Гаврилович, Жиляков Віктор Іванович
Формула / Реферат
Система керування, до складу якої входить об'єкт керування, що складається з «n» послідовно з'єднаних інерційних ланок, моделі об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а входом, що віднімає, - до виходу об'єкта керування, зворотну модель, релейний елемент, два підсилювачі, яка відрізняється тим, що додатково введені «n+1» квадраторів, інтегратор і блок перемножування, при цьому на вхід, що підсумовує, першого підсилювача надходить сигнал завдання, а «n» його входів, що віднімають, з'єднані з відповідними «n» виходами об'єкта керування, вхід якого підключений до виходу першого підсилювача, що також з'єднаний із першим входом другого суматора, другий вхід якого підключений до виходу інтегратора, вхід якого з'єднаний із виходом блока перемножування, входи якого підключені до виходу релейного елемента і виходу другого підсилювача, «n+1» входів, що підсумовують, якого з'єднані з відповідними виходами «n+1» квадраторів, входи яких підключені відповідно до «n» виходів зворотної моделі і до виходу першого суматора, що також з'єднаний із входом релейного елемента і входом зворотної моделі об'єкта керування, а вихід другого суматора підключений до входу об'єкта керування.
Текст
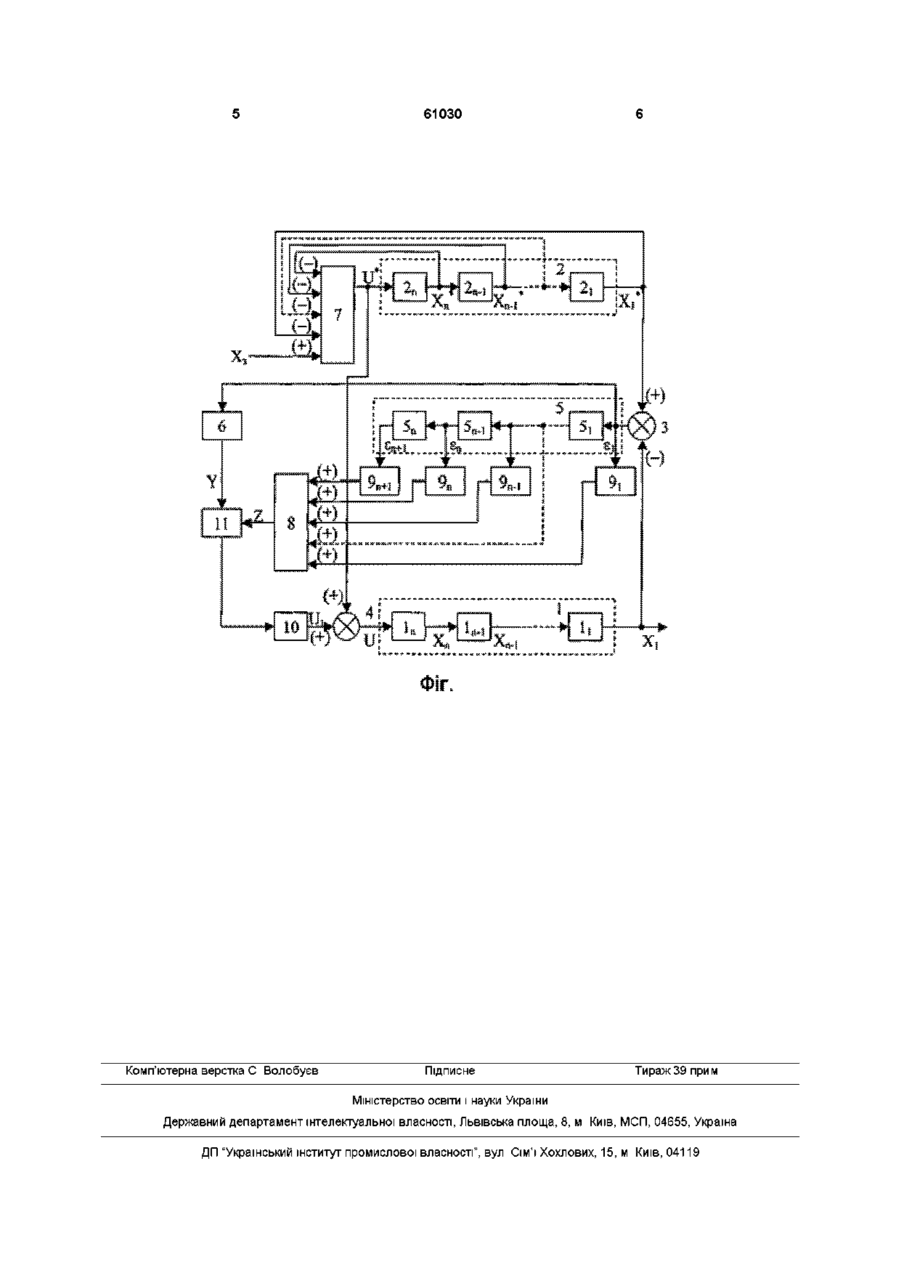
Система керування, до складу якої входить об'єкт керування, що складається з «п» послідовно з'єднаних інерційних ланок, моделі об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а входом, що віднімає, - до виходу об'єкта керування, зворотну модель, релейний елемент, два підсилювачі, яка відрізняється тим, що додатково введені «п+1» квадраторів, інтегратор і блок перемножування, при цьому на вхід, що підсумовує, першого підсилювача надходить сигнал завдання, а «п» його входів, що віднімають, з'єднані з ВІДПОВІДНИМИ «П» виходами об'єкта керування, вхід якого підключений до виходу першого підсилювача, що також з'єднаний із першим входом другого суматора, другий вхід якого підключений до виходу інтегратора, вхід якого з'єднаний із виходом блока перемножування, входи якого підключені до виходу релейного елемента і виходу другого підсилювача, «п+1» входів, що підсумовують, якого з'єднані з ВІДПОВІДНИМИ виходами «п+1» квадраторів, входи яких підключені ВІДПОВІДНО до «п» виходів зворотної моделі і до виходу першого суматора, що також з'єднаний із входом релейного елемента і входом зворотної моделі об'єкта керування, а вихід другого суматора підключений до входу об'єкта керування Винахід відноситься до автоматичного керування і може знайти застосування для керування об'єктами, параметри яких змінюються в широкому діапазоні, а також при неможливості виміру проміжних фазових координат об'єкта Відома система керування, що містить суматори, перші входи яких з'єднані з ВІДПОВІДНИМИ виходами моделі об'єкта керування, другі входи із ВІДПОВІДНИМИ виходами об'єкта керування, а виходи - з входами ВІДПОВІДНИХ підсилювачів, релейний елемент входи якого з'єднані з виходами підсилювачів, а вихід підключений до входу об'єкта керування (Авт свид СССР № 847272, кп G05B 13/00, опубл БИ №26, 1981 ) Недоліком такої системи є низька точність при дії впливів, що збурюють, на об'єкт, викликаних суперечністю в інформації про стан об'єкта, що полягає втому, що відхилення фазових координат від їхніх заданих значень до місця дії збурення і після нього мають протилежні знаки Крім того, для побудови зазначених систем керування необхідно мати інформацію про усі фазові координати об'єкта, що не завжди можливо Найбільш близької по технічній сутності і розв'язуваній задачі є система керування, що склада ється з «п» послідовно з єднаних інерційних ланок, моделі об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а входом, що віднімає - до виходу об'єкта керування, зворотну модель, релейний елемент, два підсилювачі (Авт свид СССР № 1215085, кл G05B 13/00, опубл БИ №8, 1986) Недоліком даної системи є складність забезпечення оптимальної по квадратичному критерію якості керування В основу винаходу покладене завдання удосконалити систему керування, в якій завдяки додатковому введенню квадраторів, інтегратора, блока перемножування і відповідному їх підключенню досягається автоматичне забезпечення оптимальної по квадратичному критерію якості керування Поставлене завдання досягається тим, що система керування до складу якої входить об'єкт керування, що складається з «п» послідовно з'єднаних інерційних ланок, моделі об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а входом, що віднімає - до виходу об'єкта О со о (О 61030 керування, зворотну модель, релейний елемент, два підсилювачі, згідно з винаходом, додатково введені «п+1» квадраторів, інтегратор і блок перемножування, при цьому на вхід, що підсумовує, першого підсилювача надходить сигнал завдання, а «п» його входів, що віднімають, з'єднані з ВІДПОВІДНИМИ «п» виходами об'єкта керування, вхід якого підключений до виходу першого підсилювача, що також з'єднаний із першим входом другого суматора, другий вхід якого підключений до виходу інтегратора, вхід якого з'єднаний із виходом блока перемножування, входи якого підключені до виходу релейного елемента і виходу другого підсилювача, «п+1» входів, що підсумовують, якого з'єднані з ВІДПОВІДНИМИ виходами «п+1» квадраторів, входи яких підключені ВІДПОВІДНО до «п» виходів зворотної моделі і до виходу першого суматора, що також з'єднаний із входом релейного елемента і входом зворотної моделі об'єкта керування, а вихід другого суматора підключений до входу об'єкта керування, що дозволяє автоматично забезпечити оптимальну по квадратичному критерію якість керування На фігурі подана блок-схема системи керування Система містить об'єкт керування 1, що складається з «п» послідовно з'єднаних інерційних ланок 1 (1і І2 ,1п), модель об'єкта керування 2 (2і 2г, , 2 П ), два суматори 3 і 4, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування 2, а входом, що віднімає - до виходу об'єкта керування 1, зворотну модель об'єкта керування 5 (5і 5г, , 5 П ), релейний елемент 6, два підсилювачі 7 і 8, «п+1» квадраторів 9 (9і 9г, , 9 п , 9 п +і), інтегратор 10 і блок перемножування 11, при цьому на вхід, що підсумовує, підсилювача 7 надходить сигнал завдання Хз, а «п» його входів, що віднімають, з'єднані з ВІДПОВІДНИМИ « П » виходами моделі 2, вхід якої підключений до виходу підсилювача 7, що також з'єднаний із першим входом суматора 4, другий вхід якого підключений до виходу інтегратора 10, вхід якого з'єднаний із виходом блока перемножування 1 1 , входи якого підключені до виходу релейного елемента 6 і виходи підсилювача 8, «п+1» входів, що підсумовують, якого з'єднані з ВІДПОВІДНИМИ виходами квадраторів 9-і, , 9 П , 9 п +і, входи яких підключені ВІДПОВІДНО до «п» виходів зворотної моделі 5 і до виходу суматора 3, що також з'єднаний із входом релейного елемента 6 і входом зворотної моделі 5, а вихід суматора 4 підключений до входу об'єкта 1 Система керування працює наступним способом При Хз=0 сигнал керування U* моделі 2, що одночасно є першою частиною сигналу керування об'єкта 1 (надходить на перший вхід суматора 4), бажані фазові Координати Хі*, , Хги*, Х п * формовані моделлю 2, фазові координати об'єкта 1 Х-і, , Х п і , Х п а також фазові координати зворотної моделі 5, si=Xi*-Xi, S2=X2*-X2, , sn=Xn*-Xn, s n +i=AU (керування об'єкта, що відповідають ВИХІДНІЙ координаті об'єкта єі) будуть дорівнювати нулю Це забезпечує нульові сигнали на виході квадраторів 9 (9і 9г, , 9 П , 9 п +і), на виході підсилювача 8, на виході інтегратора 10, тобто друга складова керу вання об'єкта 1, що надходить на другий вхід суматора 4 буде дорівнюти нулю (Ui=0) Після подачі сигналу Хз здійснюється формування координат Хі*, Хг*, , Хп* і ВІДПОВІДНОГО їм керування U* Це здійснюється системою керування моделлю 2, побудованої по модельному принципу керування Коефіцієнти керування по ВІДПОВІДНИХ фазових координатах Хі*, Хг*, , Хп*, моделі 2 є коефіцієнтами підсилення по ВІДПОВІДНИХ входах підсилювача 7, тобто на виході підсилювача 7 буде сигнал керування ІГ=уіХз-уіХі*-у2Х2*- -упХп* Вибором коефіцієнтів модального керування можна задати необхідні ЯКІСНІ показники системи Керування U* надходить через суматор 4 на вхід об'єкта 1 Якщо параметри моделі 2 відповідають параметрам об'єкта 1 і на об'єкт 1 не діють ЗОВНІШНІ збурення, то буде мати місце Хі=Хі*, Хг=Х2*, , Х П =Х П *, тобто рух об'єкта відбувається ВІДПОВІДНО ДО заданих якісних показників При цьому si=Xi*-Xi на виході суматора 3 буде дорівнювати нулю, а, отже, будуть рівні нулю фазові координати єг, , єп, sn+i зворотної моделі 5 Це забезпечує нульові сигнали на виході квадраторів 9 (9і 9г, , 9 П , 9 п +і), на виході цідсилювача 8, блока перемножування 11 і інтегратора 10, тобто Ui=0 При наявності параметричних або ЗОВНІШНІХ збурень, що діють на об'єкт 1, Х і ^ Х і * , тобто на виході суматора буде сигнал єі ВІДМІННИЙ ВІД нуля, ЩО, у СВОЮ Чергу, П р и в е д е ДО ПОЯВИ СИГНаЛІВ S2, S3, , єп, sn+i на виходах ВІДПОВІДНИХ ланок зворотної моделі 5 Сигнал єі надходить також на вхід релейного елемента 6, на виході якого формується сигнал у=1 • sign є-і, тобто в залежності від знака ЕІ на виході релейного елемента 6 буде ±1 Цей сигнал надходить на один із входів блока перемножування 1 1 , на другий вхід якого надходить сигнал Z із виходу підсилювача 8, що формується ВІДПОВІДНО до алгоритму Z = a i s i 2 + 32S22 + + a n s n 2 + cs n +i 2 (де аі аг, , a n , с - вагові коефіцієнти) за допомогою квадраторів 9 (9і 9г, , 9 П , 9 п +і), включених між виходами суматора 3 і зворотної моделі 5 і входами (із ВІДПОВІДНИМИ коефіцієнтами підсилення) підсилювача 8 Отже, на виході блока перемножування 1 1 , буде сигнал ±Z (у ВІДПОВІДНОСТІ ЗІ знаком є-і) Цей сигнал надходить на інтегратор 10, на виході якого буде сигнал t t U 1 = ± f Z d t = + Ja 1 s^ + a 2 s | + + &nsn + c s ^ + 1 d t , о о який є другою частиною сигналу керування (що компенсує параметричні і ЗОВНІШНІ збурення) об'єкта 1, тобто компенсує сигнал Ui формується ВІДПОВІДНО до квадратичного функціонала якості Задаючи різні значення вагових коефіцієнтів а-і, аг, , а п с (коефіцієнти підсилення по ВІДПОВІДНИХ входах підсилювача 8) можна одержати ВІДПОВІДНІ ЯКІСНІ показники відпрацьовування впливів, що збурюють, діючих на об'єкт 1 Таким чином, запропонована система керування дозволяється забезпечити оптимальне по квадратичному показнику якості керування при відпрацьовуванні параметричних і ЗОВНІШНІХ збурень, що діють на об'єкт 61030 Комп'ютерна верстка С Волобусв Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюControl unit
Автори англійськоюDriuchyn Viktor Havrylovych, Zhyliakov Viktor Ivanovych
Назва патенту російськоюУстройство управления
Автори російськоюДрючин Виктор Гаврилович, Жиляков Виктор Иванович
МПК / Мітки
МПК: G05B 13/00
Код посилання
<a href="https://ua.patents.su/3-61030-sistema-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Система керування</a>
Система керування
Номер патенту: 59845
Опубліковано: 15.09.2003
Автори: Ткачук Денис Ярославович, Жиляков Віктор Іванович, Дрючин Віктор Гаврилович
МПК: G05B 13/00
Формула / Реферат:
Система керування, що містить об'єкт керування, що складається з n послідовно з'єднаних інерційних ланок, модель об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а виходом, що віднімає, - до виходу об'єкта керування, зворотну модель об'єкта керування, два підсилювачі, яка відрізняється тим, що на вхід, що підсумовує, першого підсилювача надходить сигнал завдання, а n його...
Спосіб керування літальним апаратом та зміни його аеродинамічної компоновки і система керування
Номер патенту: 55253
Опубліковано: 17.03.2003
Автори: Сайног Максим Борисович, Егліт Микола Олександрович, Кузьмін В'ячеслав Павлович, Семенов Леонід Антонович, Яковенко Петро Олексійович, Смішко Григорій Павлович, Косовенко Євген Вікторович, Комендантова Людмила Степанівна, Доценко Борис Іванович
МПК: F42B 15/01
Мітки: спосіб, система, зміни, керування, апаратом, компоновки, аеродинамічної, літальним
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Система керування вогнем танка
Номер патенту: 49989
Опубліковано: 15.10.2002
Автори: Фролов Леонід Андрійович, Руденко Микола Прохорович, Бондаренко Олександр Григорович, Бусяк Юрій Митрофанович, Походняков Валерій Георгійович
МПК: F41G 5/00
Мітки: танка, система, вогнем, керування
Формула / Реферат:
1. Система керування вогнем танка, що містить денний приціл, який складається з гіростабілізатора і кінематично зв'язаних з ним головного дзеркала прицілу і датчика кута вертикального наведення, балістичний обчислювач, вхід якого з'єднаний з датчиком кута вертикального наведення, а вихід якого з'єднаний з приводом гармати, яка кінематично зв'язана з датчиком кута вертикального наведення і датчиком положення гармати, нічний приціл, що...
Система керування положенням платформи
Номер патенту: 48332
Опубліковано: 15.08.2002
Автори: Головіна Олена Василівна, Магерамов Лютфалій Курбан-Алієвич, Качанов Петро Олексійович, Лещенко В'ячеслав Михайлович, Васильченков Олег Георгійович, Наплеков Михайло Іванович, Ребров Олексій Анатолійович, Бусяк Юрій Митрофанович, Смоляков Василь Андрійович, Безлепкін Олександр Андрійович
МПК: G05D 1/08
Мітки: керування, система, положенням, платформи
Формула / Реферат:
Система керування положенням платформи, що містить контролер персонального комп'ютера, з'єднаний із трьома електроприводами, кожний з яких містить послідовно з'єднані цифровий регулятор, електродвигун, кінематично зв'язаний з редуктором, що обладнаний датчиком положення вихідного вала редуктора i за допомогою кривошипно-шатунного механізму з'єднаний із платформою, причому до другого i третього входів цифрового регулятора відповідно...
Система керування вогнем танка
Номер патенту: 51830
Опубліковано: 16.12.2002
Автори: Єрдаков Євген Володимирович, Хандога Анатолій Максимович, Мошнін Віктор Миколайович, Бондаренко Олександр Григорович
МПК: F41G 5/00
Мітки: вогнем, керування, танка, система
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, приціл, який складається з пульта керування, з'єднаного з приводом дзеркала прицілу, датчика кута вертикального наведення, датчика кута горизонтального наведення, які кінематично зв'язані з дзеркалом прицілу і відповідно з гарматою і баштою, балістичний обчислювач, блок керування приводами, гіротахометр вертикального наведення і гіротахометр горизонтального наведення,...
Попередній патент: Катетер
Наступний патент: Кодово-механічний пристрій
Випадковий патент: Спосіб лікування розлитого перитоніту