Система автоматичного вимірювання маси вантажу в автосамоскидах
Номер патенту: 31746
Опубліковано: 25.04.2008
Автори: Полянський Олександр Сергійович, Степанов Олексій Вікторович
Формула / Реферат
Система автоматичного вимірювання маси вантажу в автосамоскидах, що включає датчик тиску, пов'язаний з лічильником рейсів, яка відрізняється тим, що використані п'езокристалічні датчики, які вибрано з можливістю реєстрації максимально допустимих для автосамоскида навантажень (зусиль) та розташовано багатоточково по периметру вантажної платформи автосамоскида й електрично пов'язано з блоком контролю й обробки сигналів, що виникають у датчиках при впливі навантаження, блок контролю й обробки сигналів електрично пов'язаний з блоком світлової й звукової сигналізації, з блоком дистанційного зв'язку з АСУ навантажувального комплексу, з блоком відліку повновантажних рейсів за зміну, який виконано у вигляді цифрового суматора з двійково-десятковим кодуванням виходу.
Текст
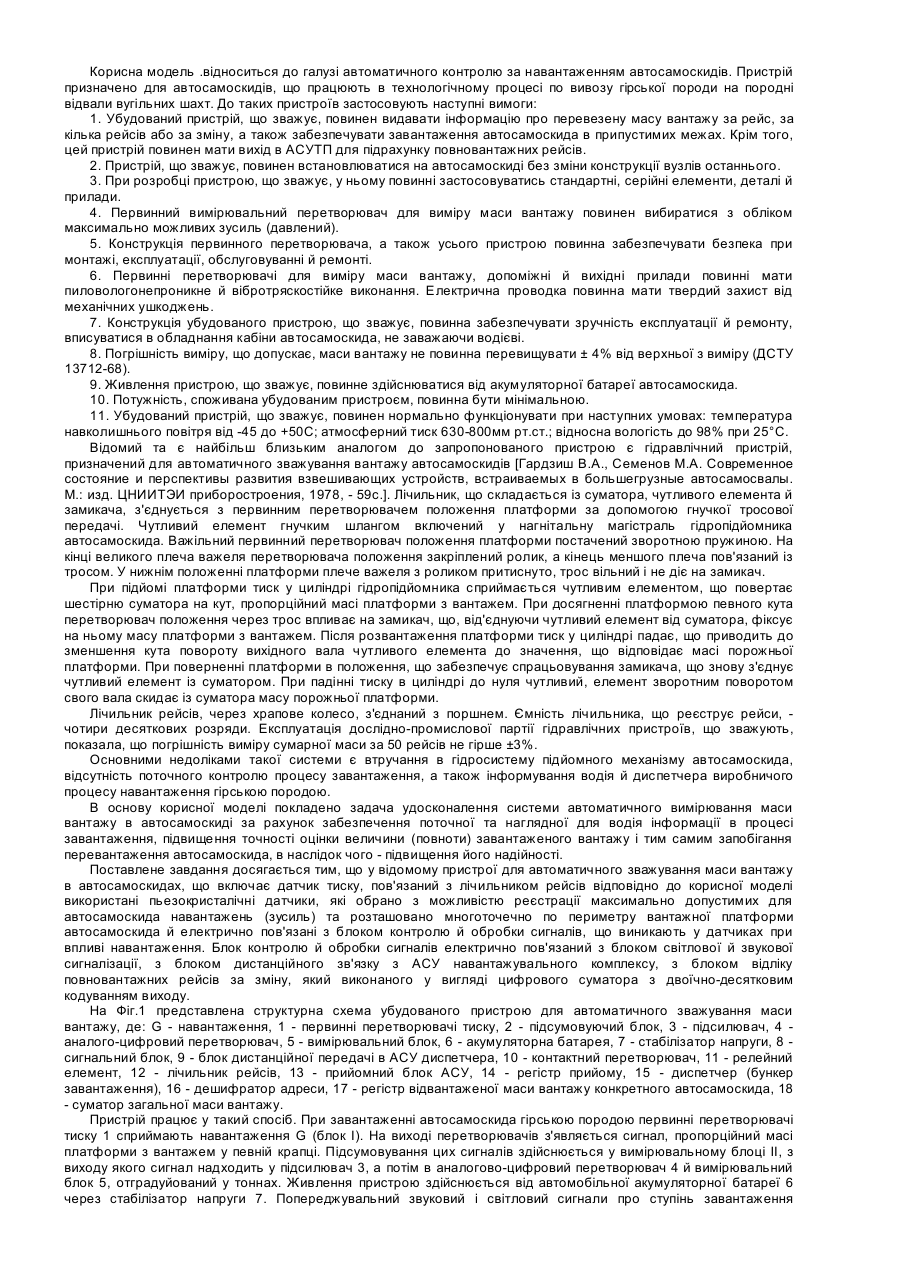
Корисна модель .відноситься до галузі автоматичного контролю за навантаженням автосамоскидів. Пристрій призначено для автосамоскидів, що працюють в технологічному процесі по вивозу гірської породи на породні відвали вугільних шахт. До таких пристроїв застосовують наступні вимоги: 1. Убудований пристрій, що зважує, повинен видавати інформацію про перевезену масу вантажу за рейс, за кілька рейсів або за зміну, а також забезпечувати завантаження автосамоскида в припустимих межах. Крім того, цей пристрій повинен мати вихід в АСУТП для підрахунку повновантажних рейсів. 2. Пристрій, що зважує, повинен встановлюватися на автосамоскиді без зміни конструкції вузлів останнього. 3. При розробці пристрою, що зважує, у ньому повинні застосовуватись стандартні, серійні елементи, деталі й прилади. 4. Первинний вимірювальний перетворювач для виміру маси вантажу повинен вибиратися з обліком максимально можливих зусиль (давлений). 5. Конструкція первинного перетворювача, а також усього пристрою повинна забезпечувати безпека при монтажі, експлуатації, обслуговуванні й ремонті. 6. Первинні перетворювачі для виміру маси вантажу, допоміжні й вихідні прилади повинні мати пиловологонепроникне й вібротряскостійке виконання. Електрична проводка повинна мати твердий захист від механічних ушкоджень. 7. Конструкція убудованого пристрою, що зважує, повинна забезпечувати зручність експлуатації й ремонту, вписуватися в обладнання кабіни автосамоскида, не заважаючи водієві. 8. Погрішність виміру, що допускає, маси вантажу не повинна перевищувати ± 4% від верхньої з виміру (ДСТУ 13712-68). 9. Живлення пристрою, що зважує, повинне здійснюватися від акумуляторної батареї автосамоскида. 10. Потужність, споживана убудованим пристроєм, повинна бути мінімальною. 11. Убудований пристрій, що зважує, повинен нормально функціонувати при наступних умовах: температура навколишнього повітря від -45 до +50С; атмосферний тиск 630-800мм рт.ст.; відносна вологість до 98% при 25°С. Відомий та є найбільш близьким аналогом до запропонованого пристрою є гідравлічний пристрій, призначений для автоматичного зважування вантажу автосамоскидів [Гардзиш В.А., Семенов М.А. Современное состояние и перспективы развития взвешивающих устройств, встраиваемых в большегрузные автосамосвалы. М.: изд. ЦНИИТЭИ приборостроения, 1978, - 59с.]. Лічильник, що складається із суматора, чутливого елемента й замикача, з'єднується з первинним перетворювачем положення платформи за допомогою гнучкої тросової передачі. Чутливий елемент гнучким шлангом включений у нагнітальну магістраль гідропідйомника автосамоскида. Важільний первинний перетворювач положення платформи постачений зворотною пружиною. На кінці великого плеча важеля перетворювача положення закріплений ролик, а кінець меншого плеча пов'язаний із тросом. У нижнім положенні платформи плече важеля з роликом притиснуто, трос вільний і не діє на замикач. При підйомі платформи тиск у циліндрі гідропідйомника сприймається чутливим елементом, що повертає шестірню суматора на кут, пропорційний масі платформи з вантажем. При досягненні платформою певного кута перетворювач положення через трос впливає на замикач, що, від'єднуючи чутливий елемент від суматора, фіксує на ньому масу платформи з вантажем. Після розвантаження платформи тиск у циліндрі падає, що приводить до зменшення кута повороту вихідного вала чутливого елемента до значення, що відповідає масі порожньої платформи. При поверненні платформи в положення, що забезпечує спрацьовування замикача, що знову з'єднує чутливий елемент із суматором. При падінні тиску в циліндрі до нуля чутливий, елемент зворотним поворотом свого вала скидає із суматора масу порожньої платформи. Лічильник рейсів, через храпове колесо, з'єднаний з поршнем. Ємність лічильника, що реєструє рейси, чотири десяткових розряди. Експлуатація дослідно-промислової партії гідравлічних пристроїв, що зважують, показала, що погрішність виміру сумарної маси за 50 рейсів не гірше ±3%. Основними недоліками такої системи є втручання в гідросистему підйомного механізму автосамоскида, відсутність поточного контролю процесу завантаження, а також інформування водія й диспетчера виробничого процесу навантаження гірською породою. В основу корисної моделі покладено задача удосконалення системи автоматичного вимірювання маси вантажу в автосамоскиді за рахунок забезпечення поточної та наглядної для водія інформації в процесі завантаження, підвищення точності оцінки величини (повноти) завантаженого вантажу і тим самим запобігання перевантаження автосамоскида, в наслідок чого - підвищення його надійності. Поставлене завдання досягається тим, що у відомому пристрої для автоматичного зважування маси вантажу в автосамоскидах, що включає датчик тиску, пов'язаний з лічильником рейсів відповідно до корисної моделі використані пьезокристалічні датчики, які обрано з можливістю реєстрації максимально допустимих для автосамоскида навантажень (зусиль) та розташовано многоточечно по периметру вантажної платформи автосамоскида й електрично пов'язані з блоком контролю й обробки сигналів, що виникають у датчиках при впливі навантаження. Блок контролю й обробки сигналів електрично пов'язаний з блоком світлової й звукової сигналізації, з блоком дистанційного зв'язку з АСУ навантажувального комплексу, з блоком відліку повновантажних рейсів за зміну, який виконаного у вигляді цифрового суматора з двоїчно-десятковим кодуванням виходу. На Фіг.1 представлена структурна схема убудованого пристрою для автоматичного зважування маси вантажу, де: G - навантаження, 1 - первинні перетворювачі тиску, 2 - підсумовуючий блок, 3 - підсилювач, 4 аналого-цифровий перетворювач, 5 - вимірювальний блок, 6 - акумуляторна батарея, 7 - стабілізатор напруги, 8 сигнальний блок, 9 - блок дистанційної передачі в АСУ диспетчера, 10 - контактний перетворювач, 11 - релейний елемент, 12 - лічильник рейсів, 13 - прийомний блок АСУ, 14 - регістр прийому, 15 - диспетчер (бункер завантаження), 16 - дешифратор адреси, 17 - регістр відвантаженої маси вантажу конкретного автосамоскида, 18 - суматор загальної маси вантажу. Пристрій працює у такий спосіб. При завантаженні автосамоскида гірською породою первинні перетворювачі тиску 1 сприймають навантаження G (блок І). На виході перетворювачів з'являється сигнал, пропорційний масі платформи з вантажем у певній крапці. Підсумовування цих сигналів здійснюється у вимірювальному блоці II, з виходу якого сигнал надходить у підсилювач 3, а потім в аналогово-цифровий перетворювач 4 й вимірювальний блок 5, отградуйований у тоннах. Живлення пристрою здійснюється від автомобільної акумуляторної батареї 6 через стабілізатор напруги 7. Попереджувальний звуковий і світловий сигнали про ступінь завантаження автосамоскидів подається сигнальним блоком 8, с вимірювального блоку 5. При досягненні номінального завантаження гірською породою, інформація подається на блок дистанційної передачі в АСУ диспетчера закінчення завантаження 9. Передана інформація в цифровому коді реєструється прийомним блоком АСУ 13, обробляється в регістрі прийому 14 з видачею команди на відключення системи навантаження з бункера 15 й, за допомогою дешифратора адреси 16, фіксується у відповідний регістр відвантаженої маси вантажу конкретному автосамоскиду 17. Суматор загальної маси вантажу 18, фіксує загальну вагу відвантаженої гірської породи кожному автосамоскиду наприкінці зміни (блок III). При розвантаженні автосамоскида, на початку підйому вантажної платформи, спрацьовує контактний перетворювач 10, що включає релейний елемент 11, і підготовляє до спрацьовування лічильник рейсів 12. Відлік повновантажного рейсу відбудеться після вивантаження гірської породи G й опускання порожньої вантажної платформи на контактний перетворювач 10 (блок IV). Труднощі рішення завдання нормалізації завантаження пов'язані з технологічними особливостями навантаження гірською породою з бункера. У зв'язку із цим убудований пристрій, що зважує, вчасно сповіщає світловим і звуковим сигналом (блок 8) водія й диспетчера про досягнення номінального завантаження, а через блок 9, дистанційного керування з навантажувальним комплексом III, автоматично відключає механізм завантаження з бункера. Також у пристрої зважування передбачено блок IV автоматичного обліку числа повно вантажних рейсів у вигляді цифрового суматора із двоїчно-десятковим кодуванням виходу, що дозволяє передавати дані про масу перевезеної гірської породи в АСУ транспортним процесом вугільної шахти. Експериментальне дослідження запропонованої системи автоматичного вимірювання маси вантажу в автосамоскиді показало, що у порівнянні з пристроєм аналогічного типу (прототипом) запропонований пристрій забезпечує: більш надійне і точне вимірювання маси вантажу; передачу інформації диспетчеру й водію в момент завантаження, що дозволяє за рахунок цього підвищити ефективність і довговічність автосамоскидів. Запропонований пристрій дозволяє виключити перевантаження вантажної платформи автосамоскиду в момент його завантаження тобто дозволяє знизити витрати палива та витрати на технічне обслуговування та ремонт. Пристрій не потребує розробки нової елементної бази.
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for automated measurement of load mass in motor dump-trucks
Автори англійськоюPolianskyi Oleksandr Serhiiovych, Stepanov Oleksii Viktorovych
Назва патенту російськоюСистема автоматического измерения массы груза в автосамосвалах
Автори російськоюПолянский Александр Сергеевич, Степанов Алексей Викторович
МПК / Мітки
МПК: G01G 19/08
Мітки: автосамоскидах, вантажу, автоматичного, маси, система, вимірювання
Код посилання
<a href="https://ua.patents.su/2-31746-sistema-avtomatichnogo-vimiryuvannya-masi-vantazhu-v-avtosamoskidakh.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного вимірювання маси вантажу в автосамоскидах</a>
Пристрій для автоматичного вимірювання маси вантажу на кар’єрних автосамоскидах
Номер патенту: 30873
Опубліковано: 15.12.2000
Автори: Бизов Богдан Володимирович, Безлуцький Юрій Борисович, Філатов Сергій Валентинович, Горіх Володимир Васильович
МПК: G01G 19/02
Мітки: пристрій, автоматичного, маси, кар'єрних, вантажу, вимірювання, автосамоскидах
Текст:
...з обох підсилювачів 2, у свою чергу підживлених від формувача синусного 3 і косинусного 4 сигналів, в якій через RC-фільтр 5 чергуються сигнали опорної частоти з блоком 6. Формувач синусного сигналу 3 також послідовно з'єднаний з блоком формування опорного сигналу 7, з якого сигнали поступають у формувач імпульсів рахування обертів фаз 8, з'єднаних також з виходом резольвера 1. Далі імпульси подаються на емітатор підрахунку, який...
Спосіб вимірювання ваги вантажу
Номер патенту: 53005
Опубліковано: 15.01.2003
Автори: Свирида Віталій Іванович, Шабатура Юрій Васильович
МПК: G01G 19/08
Мітки: спосіб, вантажу, вимірювання, ваги
Формула / Реферат:
Спосіб вимірювання ваги вантажу в транспортному засобі на пневматичному ходу, який полягає у визначенні частотної характеристики, за якою складають математичну модель транспортного засобу, який відрізняється тим, що додатково визначають частотну характеристику й температуру кожної шини транспортного засобу, а також значення атмосферного тиску до і після завантаження, і за результатами цих вимірювань по математичній моделі транспортного...
Ваги для вимірювання маси рухомих вагонів
Номер патенту: 49962
Опубліковано: 15.10.2002
Автори: Дашевський Яків Тевелевич, Марцикевич Олександр Петрович
МПК: G01G 19/04
Мітки: рухомих, ваги, вимірювання, маси, вагонів
Формула / Реферат:
Залізничні ваги для вимірювання маси рухомих вагонів, які містять кілька послідовно установлених вантажоприймальних платформ, які опираються на силовимірювальні датчики, багатоканальний аналого-цифровий перетворювач, з'єднаний своїми виходами з суматорами каналів візків і входом пристрою індикації і реєстрації, які відрізняються тим, що ваги мають схему вибору вантажоприймальних платформ, при цьому виходи силовимірювальних датчиків кожної...
Система автоматичного водіння самохідної колісної машини
Номер патенту: 71847
Опубліковано: 15.12.2004
Автори: Парфьонова Наталя Сергійовна, Поляшенко Сергій Олексійович
МПК: A01B 69/04
Мітки: колісної, водіння, система, автоматичного, машини, самохідної
Формула / Реферат:
Система автоматичного водіння самохідної колісної машини, що містить регулятор, виконавчий елемент, датчик копіювання, датчик положення керуючих коліс і суматор, яка відрізняється тим, що з метою підвищення точності відстеження заданої траєкторії, введені регульований інтегратор і датчик швидкості, причому регульований інтегратор включений послідовно між додатковим входом суматора і виходом датчика копіювання, а ланцюг керування коефіцієнтом...
Система автоматичного управління гідравлічним потужним штампувальним пресом
Номер патенту: 13470
Опубліковано: 17.04.2006
Автори: Устінов Володимир Єгорович, Єрьомкін Євген Анатолійович
МПК: B30B 15/26
Мітки: система, автоматичного, потужним, управління, гідравлічним, пресом, штампувальним
Формула / Реферат:
Система автоматичного управління гідравлічним потужним штампувальним пресом, що містить датчики положення рухомої поперечини, датчики тиску у робочому циліндрі, задатчик розміру поковки, індикатор поточного розміру поковки, виконавчий механізм системи, підсилювач потужності, датчики положення виконавчого механізму, виконавчий механізм відключення робочого ходу, електронний обчислювальний пристрій (контролер), що містить ряд блоків: блок...
Попередній патент: Пристрій діагностики забруднення мастила в агрегатах автомобіля
Наступний патент: Спосіб виготовлення адсорбенту комбінованої лікувальної дії
Випадковий патент: Спосіб магнітного запису з адаптивним підмагнічуванням