Ергатична система з контуром стабілізації параметрів стану біологічної складової
Номер патенту: 31879
Опубліковано: 25.04.2008
Автори: Поліщук Сергій Тимофійович, Бойко Іван Федорович, Азарсков Валерій Миколайович
Формула / Реферат
Ергатична система з контуром стабілізації параметрів стану біологічної складової, яка містить порівняльний прилад, прилад керування, об'єкт керування, біологічний об'єкт оптимізації, у якій перший вхід біологічного об'єкта оптимізації з'єднано з виходом об'єкта керування, перший вихід біологічного об'єкта оптимізації з'єднано з другим входом порівняльного приладу, вихід якого з'єднано з входом приладу керування, вихід якого з'єднано з входом об'єкта керування, причому перший вхід порівняльного приладу є входом ергатичної системи, вихід об'єкта керування є виходом ергатичної системи, яка відрізняється тим, що в неї введено контур стабілізації параметрів стану біологічної складової, входом якого є перший вхід суматора, вихід якого з'єднано з входом пристрою корекції гомеостазу, вихід якого з'єднано з другим входом біологічного об'єкта оптимізації, другий вихід якого є виходом контуру стабілізації і з'єднаний з другим входом суматора.
Текст
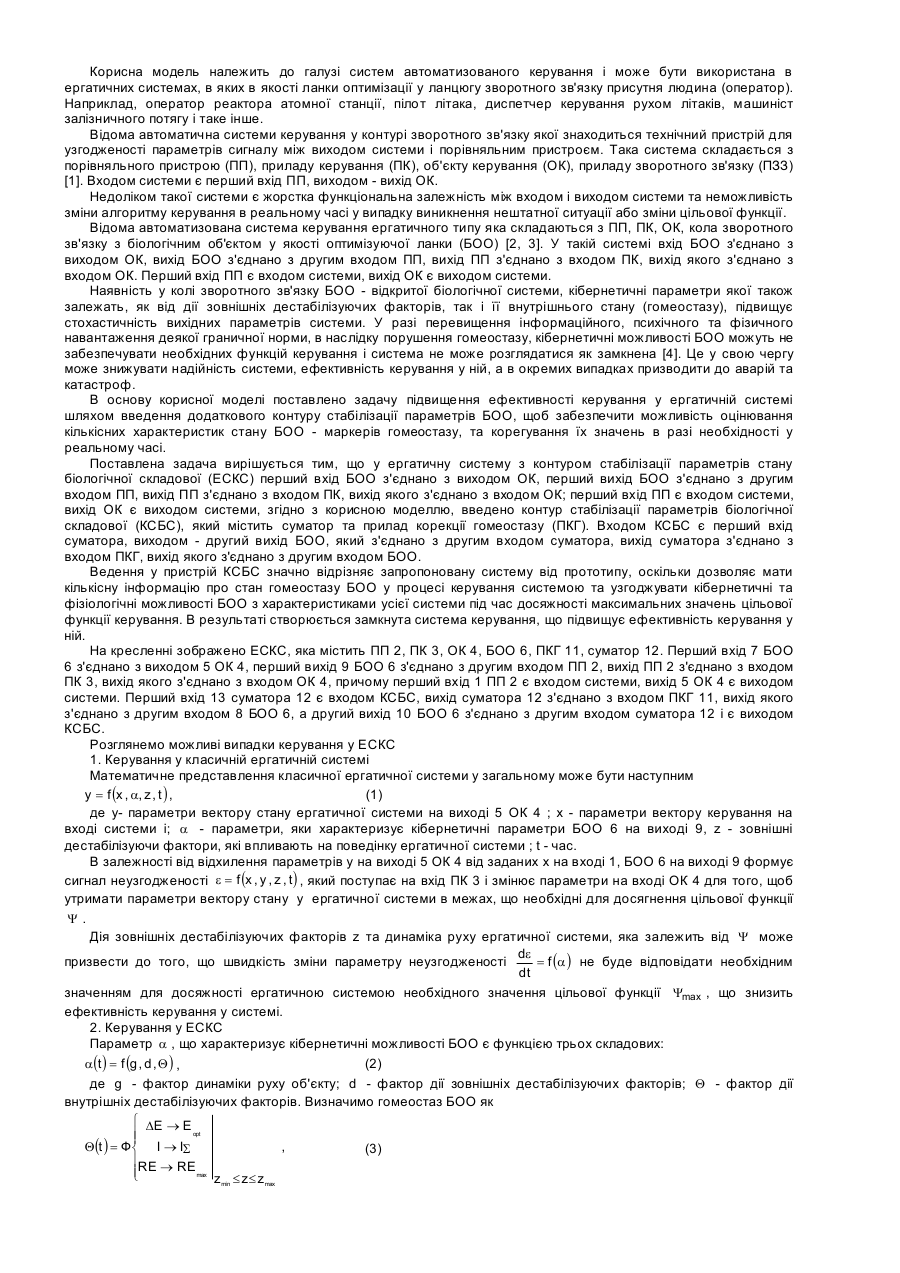
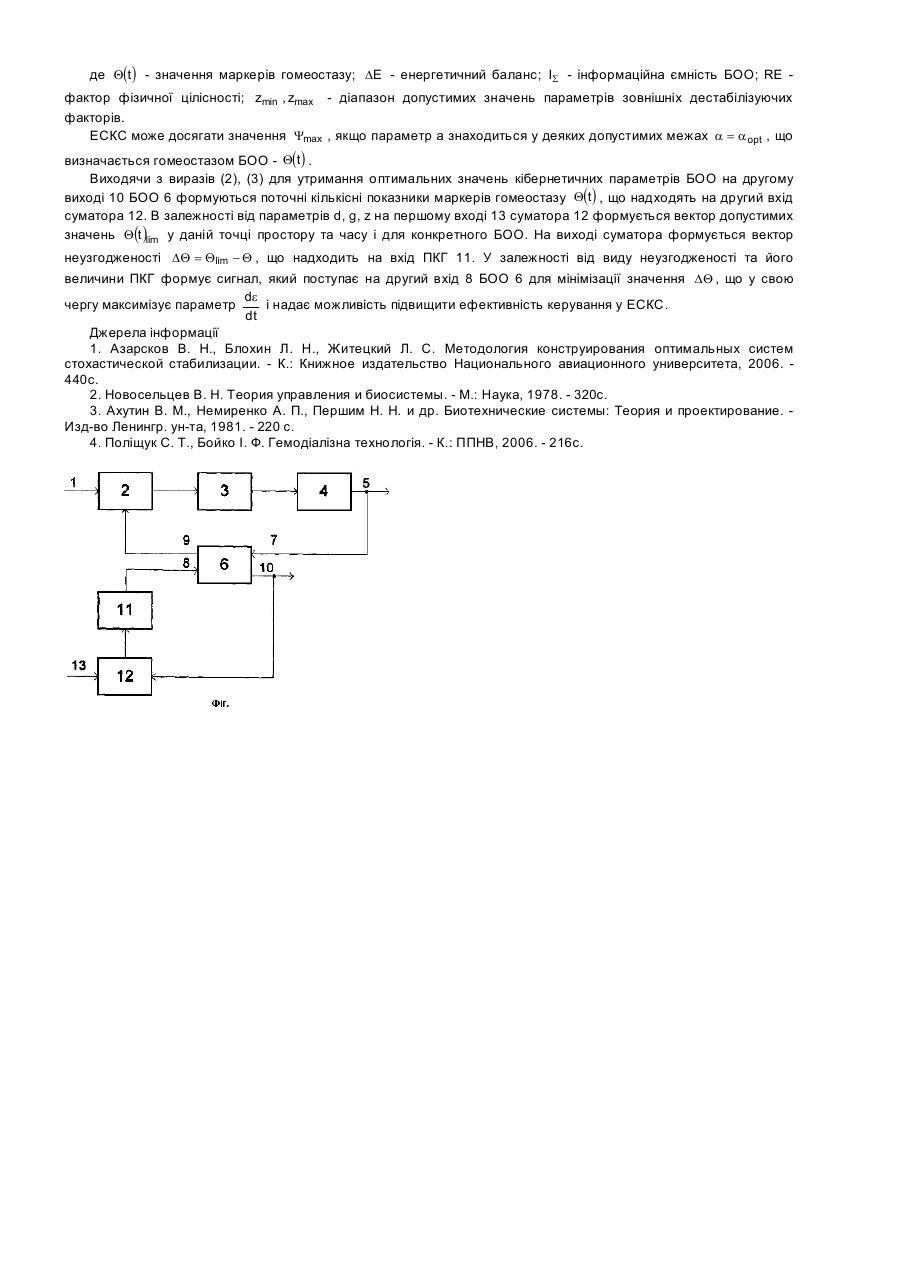
Корисна модель належить до галузі систем автоматизованого керування і може бути використана в ергатичних системах, в яких в якості ланки оптимізації у ланцюгу зворотного зв'язку присутня людина (оператор). Наприклад, оператор реактора атомної станції, пілот літака, диспетчер керування рухом літаків, машиніст залізничного потягу і таке інше. Відома автоматична системи керування у контурі зворотного зв'язку якої знаходиться технічний пристрій для узгодженості параметрів сигналу між виходом системи і порівняльним пристроєм. Така система складається з порівняльного пристрою (ПП), приладу керування (ПК), об'єкту керування (ОК), приладу зворотного зв'язку (ПЗЗ) [1]. Входом системи є перший вхід ПП, виходом - вихід ОК. Недоліком такої системи є жорстка функціональна залежність між входом і виходом системи та неможливість зміни алгоритму керування в реальному часі у випадку виникнення нештатної ситуації або зміни цільової функції. Відома автоматизована система керування ергатичного типу яка складаються з ПП, ПК, ОК, кола зворотного зв'язку з біологічним об'єктом у якості оптимізуючої ланки (БОО) [2, 3]. У такій системі вхід БОО з'єднано з виходом ОК, вихід БОО з'єднано з другим входом ПП, вихід ПП з'єднано з входом ПК, вихід якого з'єднано з входом ОК. Перший вхід ПП є входом системи, вихід ОК є виходом системи. Наявність у колі зворотного зв'язку БОО - відкритої біологічної системи, кібернетичні параметри якої також залежать, як від дії зовнішніх дестабілізуючих факторів, так і її внутрішнього стану (гомеостазу), підвищує стохастичність вихідних параметрів системи. У разі перевищення інформаційного, психічного та фізичного навантаження деякої граничної норми, в наслідку порушення гомеостазу, кібернетичні можливості БОО можуть не забезпечувати необхідних функцій керування і система не може розглядатися як замкнена [4]. Це у свою чергу може знижувати надійність системи, ефективність керування у ній, а в окремих випадках призводити до аварій та катастроф. В основу корисної моделі поставлено задачу підвищення ефективності керування у ергатичній системі шляхом введення додаткового контуру стабілізації параметрів БОО, щоб забезпечити можливість оцінювання кількісних характеристик стану БОО - маркерів гомеостазу, та корегування їх значень в разі необхідності у реальному часі. Поставлена задача вирішується тим, що у ергатичну систему з контуром стабілізації параметрів стану біологічної складової (ЕСКС) перший вхід БОО з'єднано з виходом ОК, перший вихід БОО з'єднано з другим входом ПП, вихід ПП з'єднано з входом ПК, вихід якого з'єднано з входом ОК; перший вхід ПП є входом системи, вихід ОК є виходом системи, згідно з корисною моделлю, введено контур стабілізації параметрів біологічної складової (КСБС), який містить суматор та прилад корекції гомеостазу (ПКГ). Входом КСБС є перший вхід суматора, виходом - другий вихід БОО, який з'єднано з другим входом суматора, вихід суматора з'єднано з входом ПКГ, вихід якого з'єднано з другим входом БОО. Ведення у пристрій КСБС значно відрізняє запропоновану систему від прототипу, оскільки дозволяє мати кількісну інформацію про стан гомеостазу БОО у процесі керування системою та узгоджувати кібернетичні та фізіологічні можливості БОО з характеристиками усієї системи під час досяжності максимальних значень цільової функції керування. В результаті створюється замкнута система керування, що підвищує ефективність керування у ній. На кресленні зображено ЕСКС, яка містить ПП 2, ПК 3, ОК 4, БОО 6, ПКГ 11, суматор 12. Перший вхід 7 БОО 6 з'єднано з виходом 5 ОК 4, перший вихід 9 БОО 6 з'єднано з другим входом ПП 2, вихід ПП 2 з'єднано з входом ПК 3, вихід якого з'єднано з входом ОК 4, причому перший вхід 1 ПП 2 є входом системи, вихід 5 ОК 4 є виходом системи. Перший вхід 13 суматора 12 є входом КСБС, вихід суматора 12 з'єднано з входом ПКГ 11, вихід якого з'єднано з другим входом 8 БОО 6, а другий вихід 10 БОО 6 з'єднано з другим входом суматора 12 і є виходом КСБС. Розглянемо можливі випадки керування у ЕСКС 1. Керування у класичній ергатичній системі Математичне представлення класичної ергатичної системи у загальному може бути наступним y = f (x , a, z , t ) , (1) де у- параметри вектору стану ергатичної системи на виході 5 ОК 4 ; х - параметри вектору керування на вході системи і; a - параметри, яки характеризує кібернетичні параметри БОО 6 на виході 9, z - зовнішні дестабілізуючи фактори, які впливають на поведінку ергатичної системи ; t - час. В залежності від відхилення параметрів у на виході 5 ОК 4 від заданих х на вході 1, БОО 6 на виході 9 формує сигнал неузгодженості e = f (x , y , z , t ) , який поступає на вхід ПК 3 і змінює параметри на вході ОК 4 для того, щоб утримати параметри вектору стану y ергатичної системи в межах, що необхідні для досягнення цільової функції Y. Дія зовнішніх дестабілізуючих факторів z та динаміка руху ергатичної системи, яка залежить від Y може de призвести до того, що швидкість зміни параметру неузгодженості = f (a ) не буде відповідати необхідним dt значенням для досяжності ергатичною системою необхідного значення цільової функції Ymax , що знизить ефективність керування у системі. 2. Керування у ЕСКС Параметр a , що характеризує кібернетичні можливості БОО є функцією трьох складових: a(t ) = f (g , d , Q ) , (2) де g - фактор динаміки руху об'єкту; d - фактор дії зовнішніх дестабілізуючих факторів; Q - фактор дії внутрішніх дестабілізуючих факторів. Визначимо гомеостаз БОО як ì DЕ ® Е opt ï ï Q(t ) = Ф í I ® IS , (3) ïRE ® RE ï max î z min £ z £ z max де Q(t ) - значення маркерів гомеостазу; DE - енергетичний баланс; IS - інформаційна ємність БОО; RE фактор фізичної цілісності; zmin , zmax - діапазон допустимих значень параметрів зовнішніх дестабілізуючих факторів. ЕСКС може досягати значення Ymax , якщо параметр а знаходиться у деяких допустимих межах a = a opt , що визначається гомеостазом БОО - Q(t ) . Виходячи з виразів (2), (3) для утримання оптимальних значень кібернетичних параметрів БОО на другому виході 10 БОО 6 формуються поточні кількісні показники маркерів гомеостазу Q(t ) , що надходять на другий вхід суматора 12. В залежності від параметрів d, g, z на першому вході 13 суматора 12 формується вектор допустимих значень Q(t )lim у даній точці простору та часу і для конкретного БОО. На виході суматора формується вектор неузгодженості DQ = Qlim - Q , що надходить на вхід ПКГ 11. У залежності від виду неузгодженості та його величини ПКГ формує сигнал, який поступає на другий вхід 8 БОО 6 для мінімізації значення DQ , що у свою de чергу максимізує параметр і надає можливість підвищити ефективність керування у ЕСКС. dt Джерела інформації 1. Азарсков В. Н., Блохин Л. Н., Житецкий Л. С. Методология конструирования оптимальных систем стохастической стабилизации. - К.: Книжное издательство Национального авиационного университета, 2006. 440с. 2. Новосельцев В. Н. Теория управления и биосистемы. - М.: Наука, 1978. - 320с. 3. Ахутин В. М., Немиренко А. П., Першим Н. Н. и др. Биотехнические системы: Теория и проектирование. Изд-во Ленингр. ун-та, 1981. - 220 с. 4. Поліщук С. Т., Бойко I. Ф. Гемодіалізна технологія. - К.: ППНВ, 2006. - 216с.
ДивитисяДодаткова інформація
Назва патенту англійськоюInteractive system with circuit of stabilization of parameters of state of biological component
Автори англійськоюPolischuk Serhiy Tymofiiovych, Azarskov Valerii Mykolaiovych, Boiko Ivan Fedorovych
Назва патенту російськоюЭргатическая система с контуром стабилизации параметров состояния биологической составляющей
Автори російськоюПолищук Сергей Тимофеевич, Азарсков Валерий Николаевич, Бойко Иван Федорович
МПК / Мітки
МПК: G05B 13/00
Мітки: стабілізації, ергатична, біологічно, контуром, складової, параметрів, стану, система
Код посилання
<a href="https://ua.patents.su/2-31879-ergatichna-sistema-z-konturom-stabilizaci-parametriv-stanu-biologichno-skladovo.html" target="_blank" rel="follow" title="База патентів України">Ергатична система з контуром стабілізації параметрів стану біологічної складової</a>
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Величко Надія Вікторівна, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: стабілізації, апарата, безпілотного, система, літального
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Паніна Алла Володимирівна, Симонов Володимир Федорович, Литвиненко Денис Володимирович
МПК: G05D 1/03
Мітки: апарата, система, безпілотного, літального, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Пристрій для вимірювання змін уявної складової діелектричної проникності біологічної речовини
Номер патенту: 6716
Опубліковано: 16.05.2005
Автори: Мунтян Володимир Олексійович, Коваленко Ярослав Миколайович, Мунтян Андрій Володимирович
МПК: G01R 27/04
Мітки: змін, пристрій, проникності, вимірювання, речовини, діелектричної, біологічно, уявної, складової
Формула / Реферат:
Пристрій для вимірювання змін уявної складової діелектричної проникності біологічної речовини, який містить послідовно з'єднані НВЧ-генератор, вихід якого через блок автоматичного підстроювання частоти з'єднаний з керуючим входом НВЧ-генератора, модуляторний вхід якого підключений до виходу модулятора, резонансний підсилювач, реєстратор уявної складової діелектричної проникності, НВЧ-детектор, блок опорних напруг, диференціальний підсилювач,...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Амелін Сергій Вікторович, Антошик Вікторія Миколаївна
МПК: B64C 13/00, G05D 1/03
Мітки: стабілізації, безпілотного, літального, система, апарата
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Система керування
Номер патенту: 66917
Опубліковано: 15.06.2004
Автори: Чигирин Юрій Трохимович, Маранов Олександр Вікторович, Чигирин Олег Трохимович
МПК: G06F 11/00, G06F 11/16
Формула / Реферат:
Система керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом системи керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Попередній патент: Пристрій для обробки діелектричних паливно-мастильних матеріалів
Наступний патент: Пристрій затримки імпульсних сигналів
Випадковий патент: Склоочисник