Слідкуюча система
Номер патенту: 62671
Опубліковано: 15.12.2003
Автори: Мухлаєв Сергій Вікторович, Соколов Юрий Миколайович, Субота Анатолій Максимович, Клименко Віталій Валерійович
Формула / Реферат
Слідкуюча система, що містить датчик положення вхідного вала, датчик положення вихідного вала, вимірювач неузгодження, підсилювач, привід навантаження, яка відрізняється тим, що додатково містить мікроконтролер, який через узгоджуючий інтерфейс з'єднаний з входом крокового двигуна, вихідний вал якого через редуктор і кінематичний зв'язок з'єднаний з ротором датчика положення вхідного вала, вихід якого через перший підсилювач з'єднаний з одним з входів вимірювача неузгодження, вихід якого через підсилювач потужності приєднаний до входу приводу навантаження, вихідний вал якого зв'язаний з навантаженням, яке, в свою чергу, через кінематичний зв'язок з'єднано з ротором датчика положення вихідного вала навантаження, вихід якого через другий підсилювач приєднаний до другого входу вимірювача неузгодження.
Текст
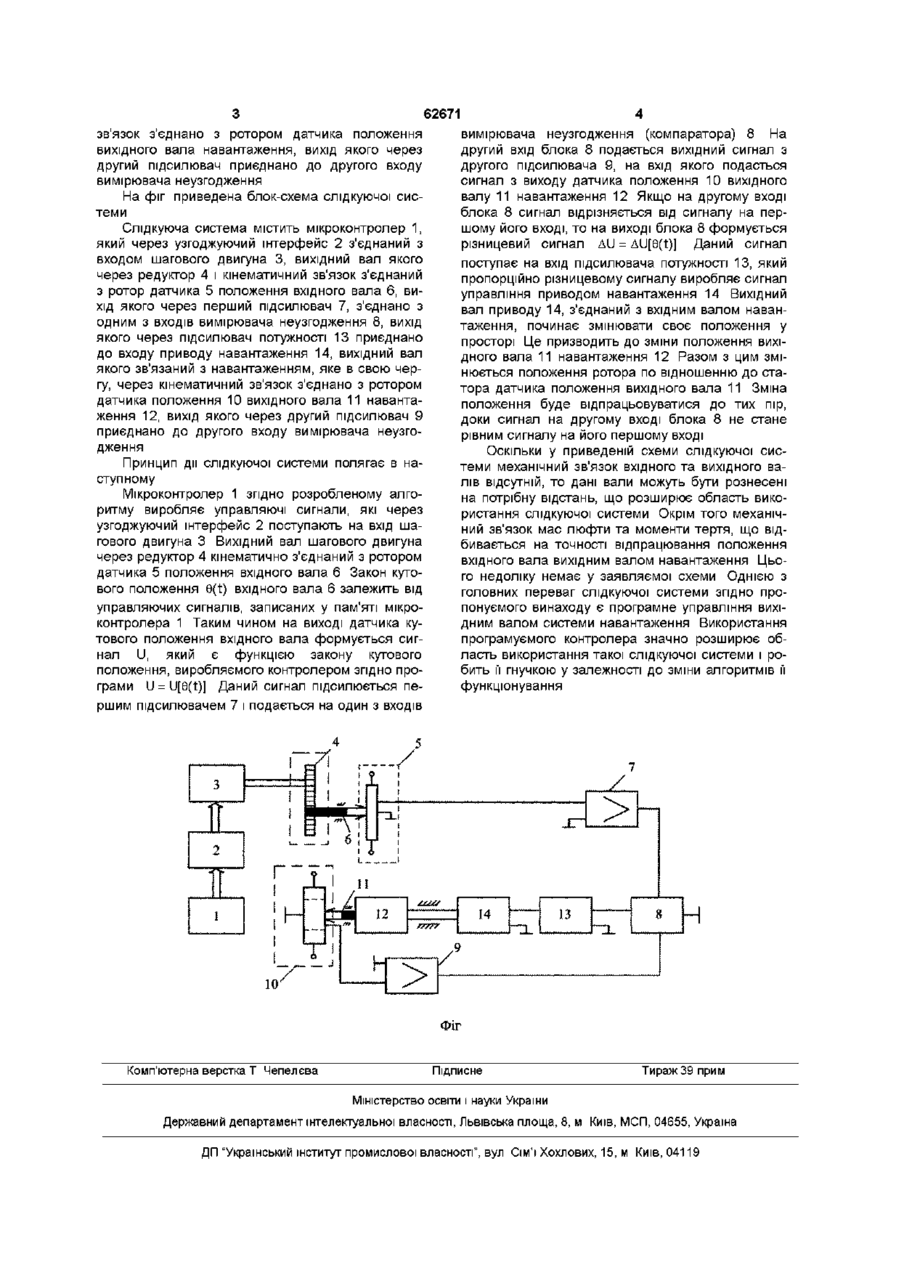
Слідкуюча система, що містить датчик положення вхідного вала, датчик положення вихідного вала, вимірювач неузгодження, підсилювач, привід навантаження, яка відрізняється тим, що додат ково містить мікроконтролер, який через узгоджуючий інтерфейс з'єднаний з входом крокового двигуна, вихідний вал якого через редуктор і кінематичний зв'язок з'єднаний з ротором датчика положення вхідного вала, вихід якого через перший підсилювач з'єднаний з одним з входів вимірювача неузгодження, вихід якого через підсилювач потужності приєднаний до входу приводу навантаження, вихідний вал якого зв'язаний з навантаженням, яке, в свою чергу, через кінематичний зв'язок з'єднано з ротором датчика положення вихідного вала навантаження, вихід якого через другий підсилювач приєднаний до другого входу вимірювача неузгодження Винахід відноситься до слідкуючих систем автоматизованого приводу, з програмним управлінням положення навантаження на відстані Відома слідкуюча система, яка містить датчик кута повороту вхідного вала, ротор якого з'єднаний з вхідним валом, а вихід через підсилювач і виконавчий механізм - з вихідним валом, який, у свою чергу, з'єднаний зі статором датчика кута повороту вхідного вала [Юматов В В А С СРСР №586421, М Кл 2 G05B11/01 Опубліковано З012 77 Бюлетень №48] Відома слідкуюча система, яка містить основу, вхідний вал, датчик кута повороту вхідного валу, з'єднаний через підсилювач з приводом навантаження, різьбову втулку, в середині якої розташовано вхідний вал, рухомо з'єднаний з втулкою та кінематичне зв'язаний з ротором датчика кута повороту вхідного вала, а втулка, яка кінематично зв'язана з приводом навантаження, мас фіксатор від повздовжнього переміщення відносно основи [Юматов В В А С СССР №769498, М Кл 3 G05D1/00 Опубліковано 7 10 80 Бюлетень №37] До недоліків відомих систем необхідно віднести порівняльне низьку їх точність, бо вони виконані з використанням суто механічного зв'язку між вхід вала Відома найбільш близька за технічною суттю слідкуюча система [Воронов А А Основы теории автоматического управления Часть 1 М-л "Энергия", 1965, с 15-22], яка містить датчик положення вхідного вала, датчик положення вихідного вала, вимірювач неузгодження, підсилювач та виконавчий механізм До недоліків даної слідкуючої системи відноситься те, що вона не може функціонувати під програмним управлінням Задачею даного винаходу являється підвищення точності роботи системи, здобуття можливості рознесення вхідного і вихідного валів на відстань, а також забезпечення гнучкості системи за рахунок програмного управління Поставлена задача вирішується тим, що в слідкуючу систему, яка містить датчик положення вхідного вала, датчик положення вихідного вала, вимірювач неузгодження, попередній підсилювач, привід навантаження, згідно з винаходом до неї додатково введені мікроконтролер, який через узгоджуючий інтерфейс з'єднаний з входом шагового двигуна, вихідний вал якого через редуктор і кінематичний зв'язок з'єднаний з ротором датчика положення вхідного вала, вихід якого через перший підсилювач з'єднано з одним з входів вимірювача неузгодження, вихід якого через підсилювач потужності приєднано до входу приводу навантаження, вихідний вал якого зв'язаний з навантаженням, яке в свою чергу, через кінематичний ним та вихідним валами, окрім того, ВХІДНІ та ВИХІ ДНІ вали повинні бути розташованими на достатньо близькій відстані один від одного, а також неможливе функціонування таких систем при програмному управлінні приводом навантаження, який знаходиться на значній відстані від вхідного (О (О 62671 звязок з єднано з ротором датчика положення вихідного вала навантаження, вихід якого через другий підсилювач приєднано до другого входу вимірювача неузгодження На фіг приведена блок-схема слідкуючої системи Слідкуюча система містить м ікро контролер 1, який через узгоджуючий інтерфейс 2 з'єднаний з входом шагового двигуна 3, вихідний вал якого через редуктор 4 і кінематичний зв'язок з'єднаний з ротор датчика 5 положення вхідного вала 6, вихід якого через перший підсилювач 7, з'єднано з одним з входів вимірювача неузгодження 8, вихід якого через підсилювач потужності 13 приєднано до входу приводу навантаження 14, вихідний вал якого зв'язаний з навантаженням, яке в свою чергу, через кінематичний зв'язок з'єднано з ротором датчика положення 10 вихідного вала 11 навантаження 12, вихід якого через другий підсилювач 9 приєднано до другого входу вимірювача неузгодження Принцип дії слідкуючої системи полягає в наступному Мікроконтролер 1 згідно розробленому алгоритму виробляє управляючі сигнали, які через узгоджуючий інтерфейс 2 поступають на вхід шагового двигуна 3 Вихідний вал шагового двигуна через редуктор 4 кінематично з'єднаний з ротором датчика 5 положення вхідного вала 6 Закон кутового положення 9(t) вхідного вала 6 залежить від управляючих сигналів, записаних у пам'яті мікроконтролера 1 Таким чином на виході датчика кутового положення вхідного вала формується сигнал U, який є функцією закону кутового положення, виробляємого контролером згідно програми U = U[9(t)] Даний сигнал підсилюється першим підсилювачем 7 і подається на один з входів вимірювача неузгодження (компаратора) 8 На другий вхід блока 8 подається вихідний сигнал з другого підсилювача 9, на вхід якого подасться сигнал з виходу датчика положення 10 вихідного валу 11 навантаження 12 Якщо на другому вході блока 8 сигнал відрізняється від сигналу на першому його вході, то на виході блока 8 формується різницевий сигнал Дії = AU[6(t)] Даний сигнал поступає на вхід підсилювача потужності 13, який пропорційно різницевому сигналу виробляє сигнал управління приводом навантаження 14 Вихідний вал приводу 14, з'єднаний з вхідним валом навантаження, починає змінювати своє положення у просторі Це призводить до зміни положення вихідного вала 11 навантаження 12 Разом з цим змінюється положення ротора по відношенню до статора датчика положення вихідного вала 11 Зміна положення буде відпрацьовуватися до тих пір, доки сигнал на другому вході блока 8 не стане рівним сигналу на його першому вході Оскільки у приведеній схеми слідкуючої системи механічний зв'язок вхідного та вихідного валів відсутній, то дані вали можуть бути рознесені на потрібну відстань, що розширює область використання слідкуючої системи Окрім того механічний зв'язок мас люфти та моменти тертя, що відбивається на точності відпрацювання положення вхідного вала вихідним валом навантаження Цього недоліку немає у заявляємої схеми Однією з головних переваг слідкуючої системи згідно пропонуємого винаходу є програмне управління вихідним валом системи навантаження Використання програмуємого контролера значно розширює область використання такої слідкуючої системи і робить її гнучкою у залежності до зміни алгоритмів її функціонування Фіг Комп'ютерна верстка Т Чепелєва Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюTracking system
Автори англійськоюSubota Anatolii Maksymovych, Sokolov Yurii Mykolaiovych
Назва патенту російськоюСледящая система
Автори російськоюСубота Анатолий Максимович, Соколов Юрий Николаевич
МПК / Мітки
МПК: G05B 11/01, G06F 11/07, F15B 9/00, G05B 19/02
Код посилання
<a href="https://ua.patents.su/2-62671-slidkuyucha-sistema.html" target="_blank" rel="follow" title="База патентів України">Слідкуюча система</a>
Копіювальна слідкуюча система пропорційного керування для металорізальних верстатів
Номер патенту: 9773
Опубліковано: 30.09.1996
Автори: Дубров Борис Іванович, Лавріненко Анатолій Костянтинович
МПК: B23Q 35/00
Мітки: копіювальна, верстатів, система, металорізальних, керування, слідкуюча, пропорційного
Формула / Реферат:
(57) Копировальная следящая система пропорционального управления для металлорежущих станков, содержащая копировальный датчик, предварительный усилитель-выпрямитель, усилители сигналов задающего и следящего каналов и электроприводов, отличающаяся тем, что она снабжена дистанционным регулятором чувствительности датчика, преобразователем уровня, блоком выделения модуля сигнала и нелинейными блоками, причем вход регулятора чувствительности...
Система керування положенням платформи
Номер патенту: 48332
Опубліковано: 15.08.2002
Автори: Наплеков Михайло Іванович, Лещенко В'ячеслав Михайлович, Смоляков Василь Андрійович, Безлепкін Олександр Андрійович, Васильченков Олег Георгійович, Бусяк Юрій Митрофанович, Ребров Олексій Анатолійович, Головіна Олена Василівна, Качанов Петро Олексійович, Магерамов Лютфалій Курбан-Алієвич
МПК: G05D 1/08
Мітки: система, платформи, положенням, керування
Формула / Реферат:
Система керування положенням платформи, що містить контролер персонального комп'ютера, з'єднаний із трьома електроприводами, кожний з яких містить послідовно з'єднані цифровий регулятор, електродвигун, кінематично зв'язаний з редуктором, що обладнаний датчиком положення вихідного вала редуктора i за допомогою кривошипно-шатунного механізму з'єднаний із платформою, причому до другого i третього входів цифрового регулятора відповідно...
Система керування вогнем танка
Номер патенту: 49989
Опубліковано: 15.10.2002
Автори: Руденко Микола Прохорович, Походняков Валерій Георгійович, Фролов Леонід Андрійович, Бусяк Юрій Митрофанович, Бондаренко Олександр Григорович
МПК: F41G 5/00
Мітки: система, керування, танка, вогнем
Формула / Реферат:
1. Система керування вогнем танка, що містить денний приціл, який складається з гіростабілізатора і кінематично зв'язаних з ним головного дзеркала прицілу і датчика кута вертикального наведення, балістичний обчислювач, вхід якого з'єднаний з датчиком кута вертикального наведення, а вихід якого з'єднаний з приводом гармати, яка кінематично зв'язана з датчиком кута вертикального наведення і датчиком положення гармати, нічний приціл, що...
Слідкуюча синхронізація при передачі телемеханічної інформації
Номер патенту: 22679
Опубліковано: 07.04.1998
Автор: Шовкопляс Іван Петрович
МПК: H04J 3/00
Мітки: телемеханічної, слідкуюча, синхронізація, передачі, інформації
Формула / Реферат:
Слідкуюча синхронізація при передачі телемеханічної інформації, яка складається з генератора синхроімпульсів, входом з'єднаного з виходом пристрою розпізнавача технічно-означеного імпульсу, а виходом підключеного до лінії зв'язку, до входів управляючого пристрою, пристрою-формувача синхрокілець управляючих Імпульсів, інформаційних регістрів приладу для зчитування інформації з віддаленого джерела - в прийомному блоці і входом з'єднаного з...
Система керування вогнем танка
Номер патенту: 51805
Опубліковано: 16.12.2002
Автори: Фролов Леонід Андрійович, Бондаренко Олександр Григорович
МПК: F41G 5/00
Мітки: вогнем, керування, танка, система
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, датчик кутового положення гармати, жорстко установлений на башті і кінематично зв'язаний з гарматою, приціл, датчик кута вертикального наведення і датчик кута горизонтального наведення, які кінематично зв'язані з прицілом і відповідно з гарматою і баштою, а датчик кута вертикального наведення електрично зв'язаний з приводом гармати, яка відрізняється тим, що в систему...
Попередній патент: Інструмент для обробки отворів
Наступний патент: Спосіб прогнозування імунного статусу новонароджених
Випадковий патент: Розважальний комплекс "mamagi"