Слідкуюча система
Номер патенту: 63756
Опубліковано: 15.08.2005
Автори: Старков Юрій Володимирович, Кралін Володимир Всеволодович, Стеба Олександр Михайлович, Орляк Микола Васильович, Мотуз Георгій Іванович, Стефанович Віктор Тарасович, Корсун Валентин Петрович
Формула / Реферат
Лінійний хвильовий п'єзоелектричний двигун, що містить дві притиснуті одна до одної однією або двома плоскими фрикційними поверхнями дві частини з можливістю їх взаємного зміщення, одна з яких є п'єзоелемент у формі бруска з трьома парами електродів на плоских протилежних поверхнях, крайні з яких перехресно з'єднані між собою, між якими розміщена третя пара електродів, який відрізняється тим, що брусок виконаний з одного матеріалу постійного перерізу, довжина якого дорівнює 1,3-1,7 відстані між фрикційними поверхнями.
Текст
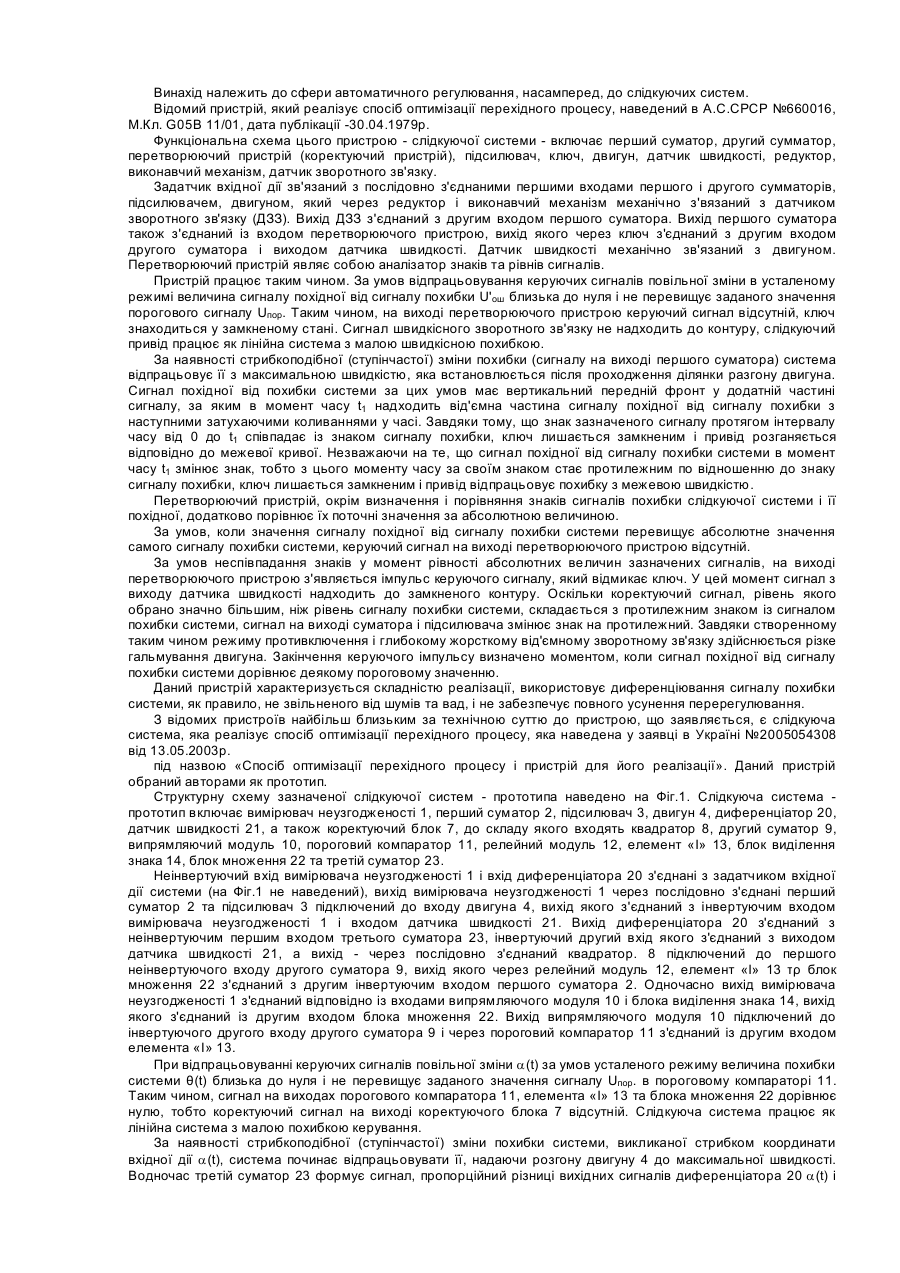
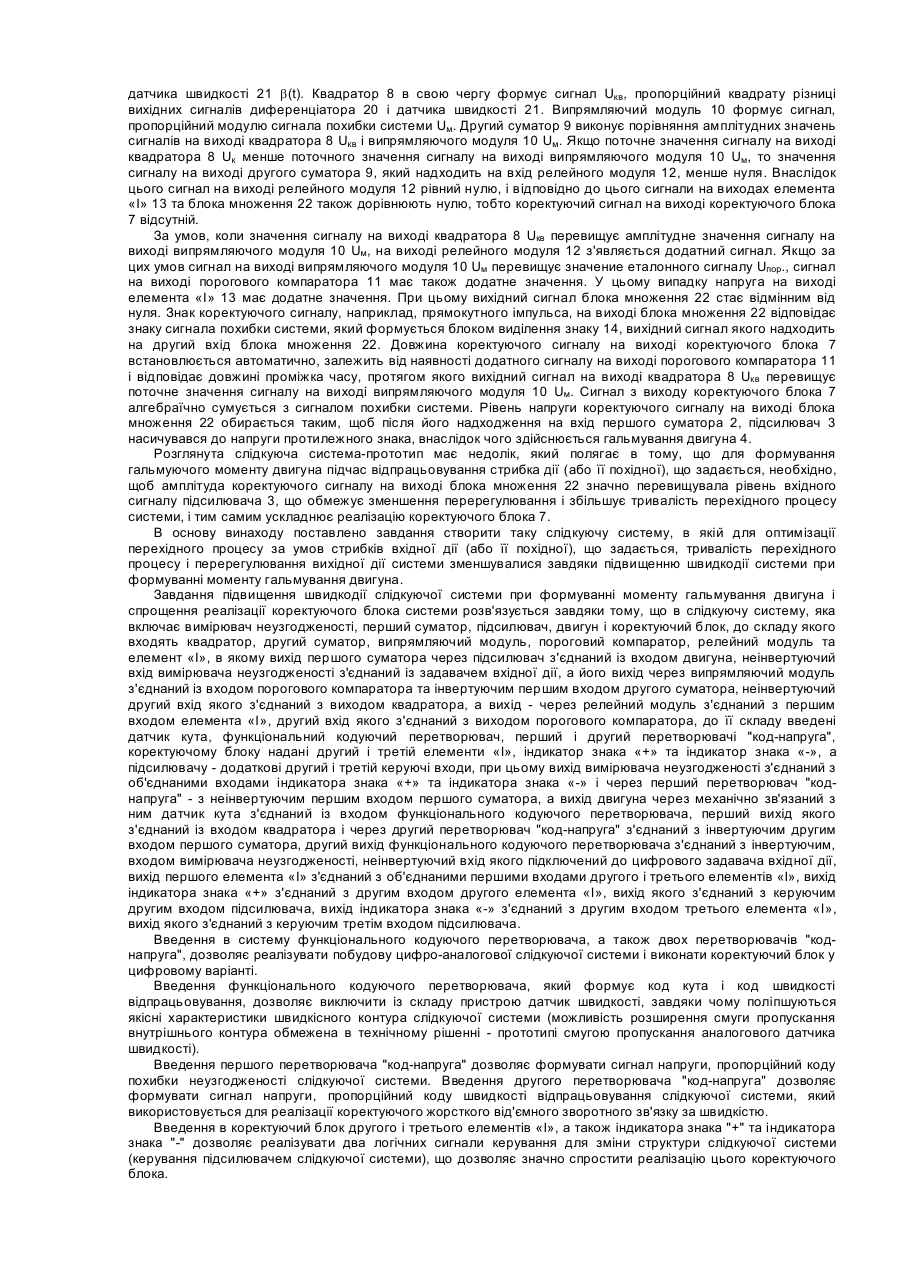
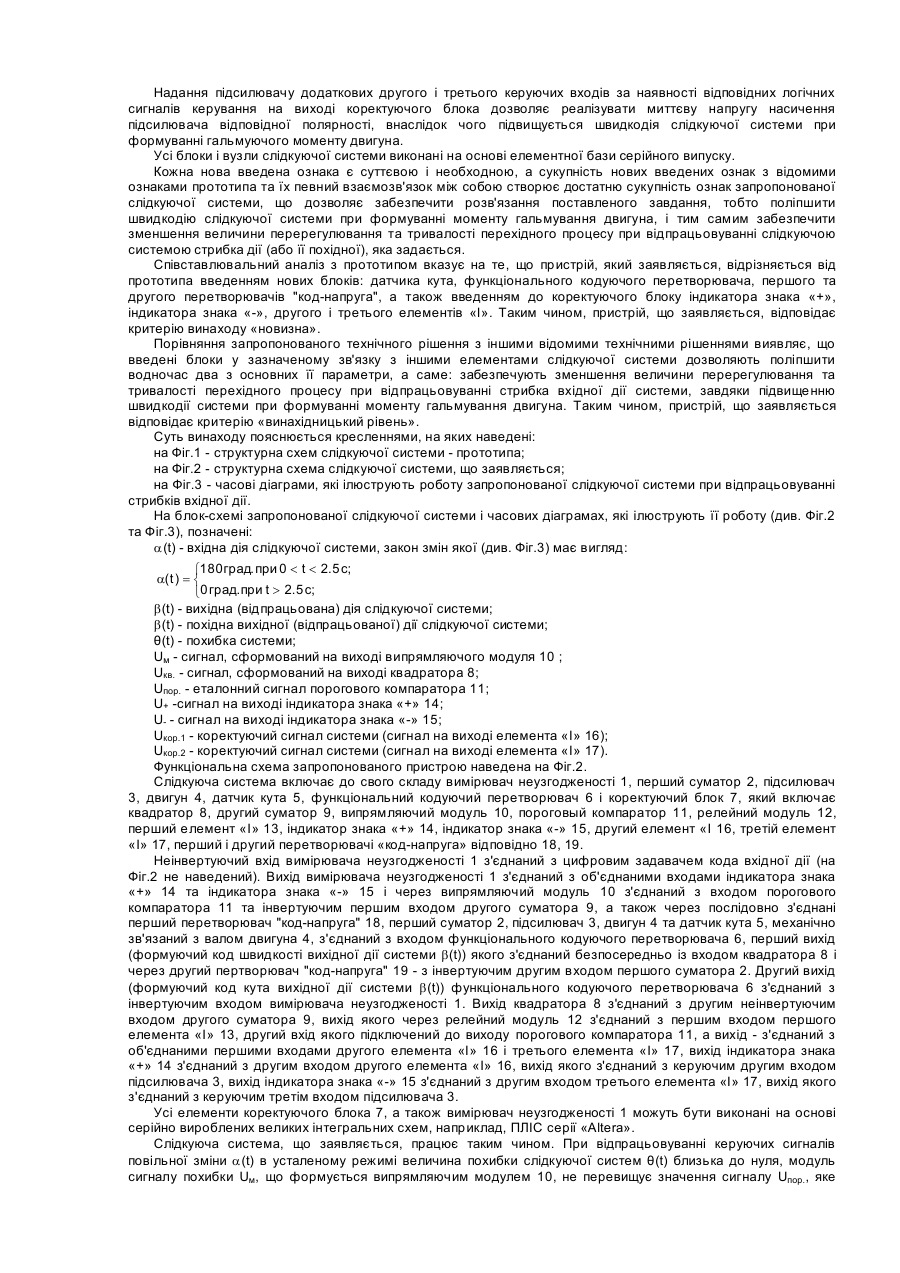
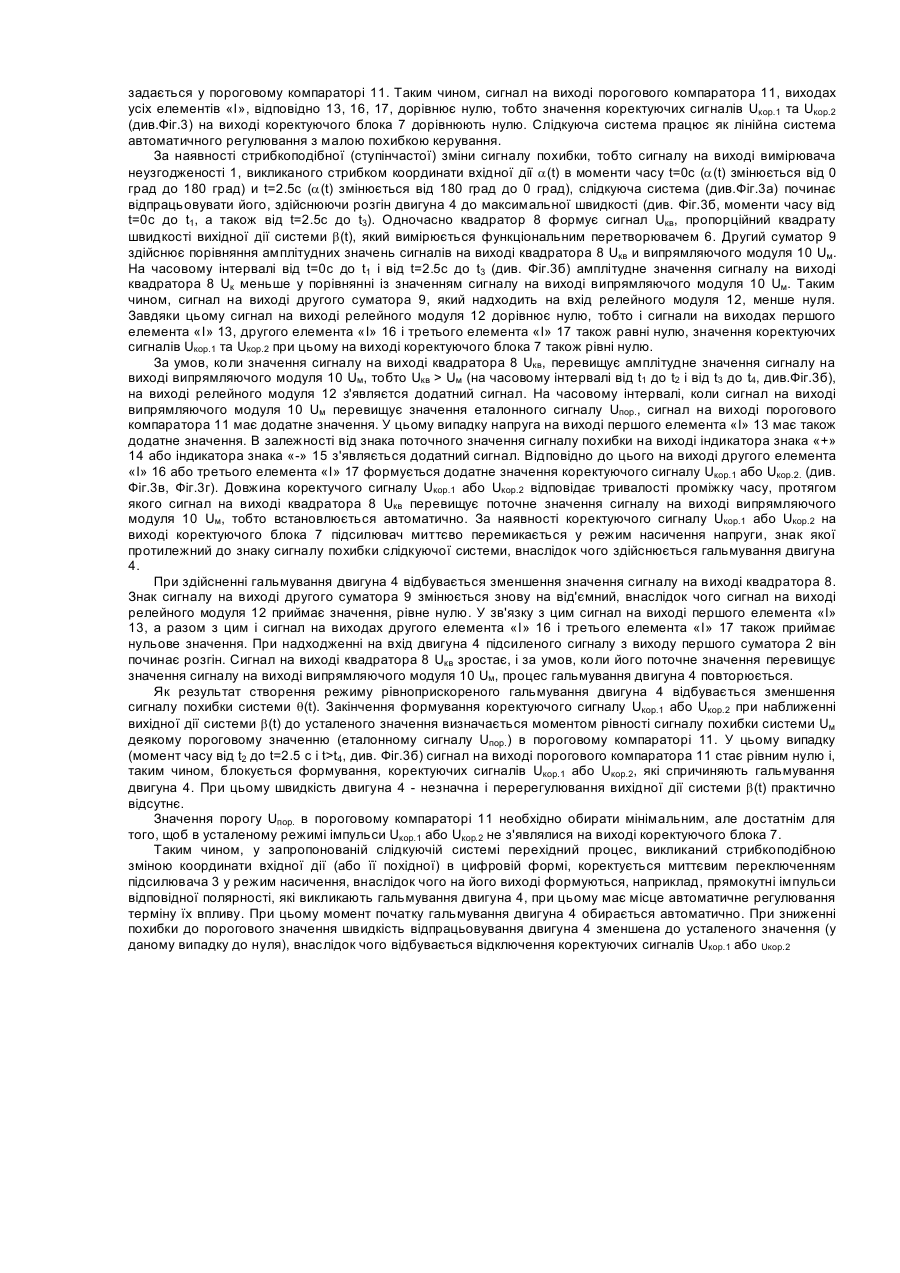
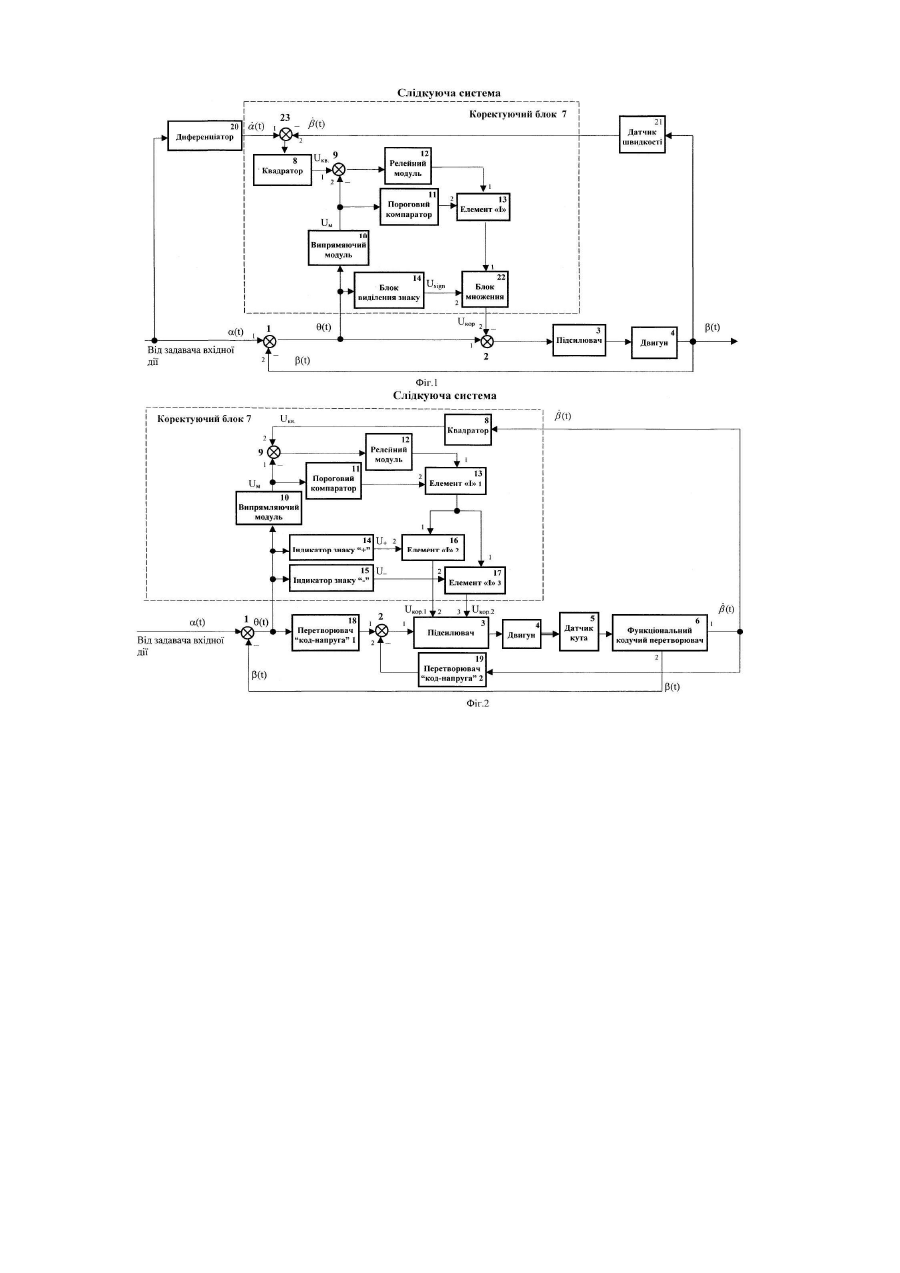
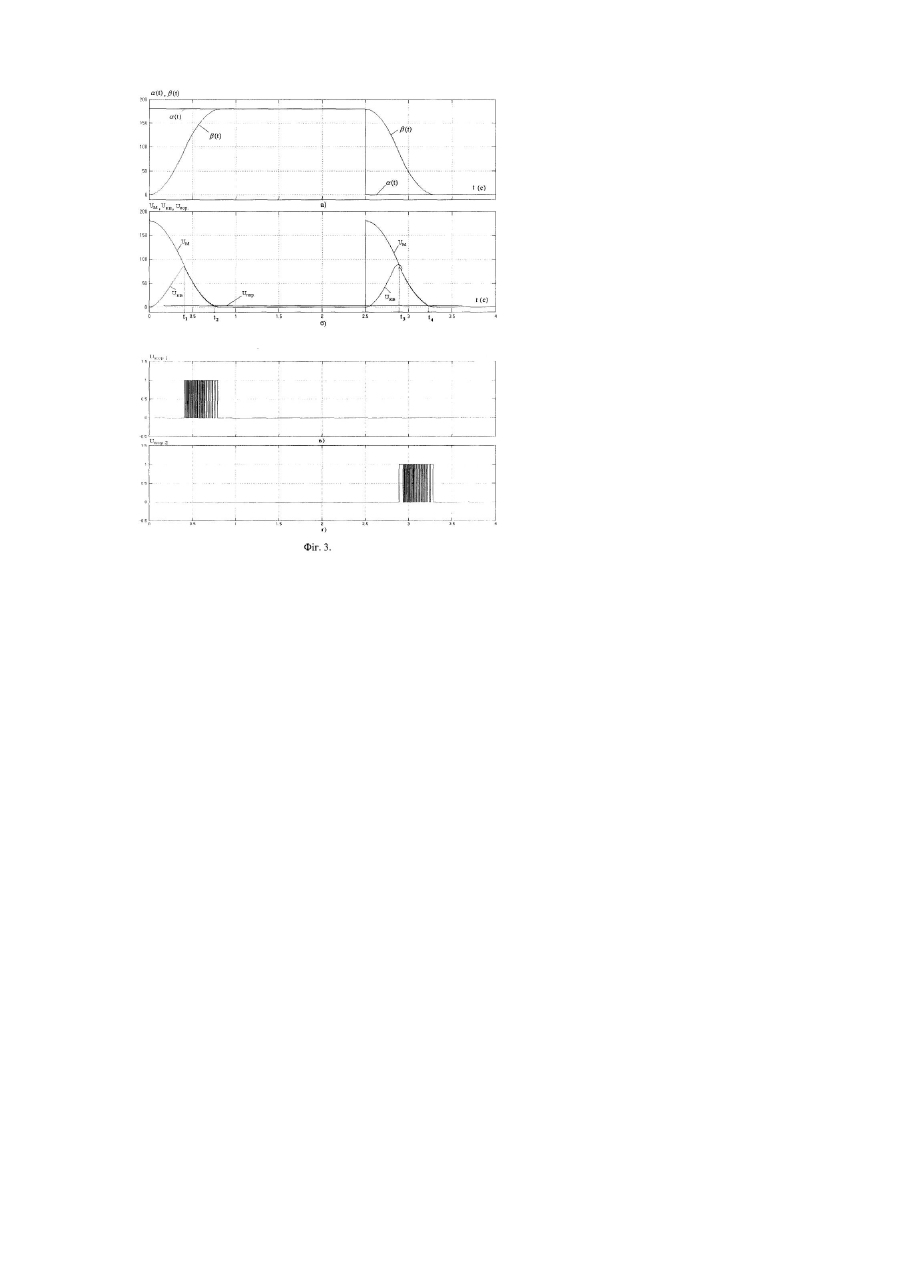
Винахід належить до сфери автоматичного регулювання, насамперед, до слідкуючих систем. Відомий пристрій, який реалізує спосіб оптимізації перехідного процесу, наведений в А.С.СРСР №660016, М.Кл. G05B 11/01, дата публікації -30.04.1979р. Функціональна схема цього пристрою - слідкуючої системи - включає перший суматор, другий сумматор, перетворюючий пристрій (коректуючий пристрій), підсилювач, ключ, двигун, датчик швидкості, редуктор, виконавчий механізм, датчик зворотного зв'язку. Задатчик вхідної дії зв'язаний з послідовно з'єднаними першими входами першого і другого сумматорів, підсилювачем, двигуном, який через редуктор і виконавчий механізм механічно з'вязаний з датчиком зворотного зв'язку (ДЗЗ). Вихід ДЗЗ з'єднаний з другим входом першого суматора. Вихід першого суматора також з'єднаний із входом перетворюючого пристрою, вихід якого через ключ з'єднаний з другим входом другого суматора і виходом датчика швидкості. Датчик швидкості механічно зв'язаний з двигуном. Перетворюючий пристрій являє собою аналізатор знаків та рівнів сигналів. Пристрій працює таким чином. За умов відпрацьовування керуючих сигналів повільної зміни в усталеному режимі величина сигналу похідної від сигналу похибки U'ош близька до нуля і не перевищує заданого значення порогового сигналу Uпор. Таким чином, на виході перетворюючого пристрою керуючий сигнал відсутній, ключ знаходиться у замкненому стані. Сигнал швидкісного зворотного зв'язку не надходить до контуру, слідкуючий привід працює як лінійна система з малою швидкісною похибкою. За наявності стрибкоподібної (ступінчастої) зміни похибки (сигналу на виході першого суматора) система відпрацьовує її з максимальною швидкістю, яка встановлюється після проходження ділянки разгону двигуна. Сигнал похідної від похибки системи за цих умов має вертикальний передній фронт у додатній частині сигналу, за яким в момент часу t1 надходить від'ємна частина сигналу похідної від сигналу похибки з наступними затухаючими коливаннями у часі. Завдяки тому, що знак зазначеного сигналу протягом інтервалу часу від 0 до t1 співпадає із знаком сигналу похибки, ключ лишається замкненим і привід розганяється відповідно до межевої кривої. Незважаючи на те, що сигнал похідної від сигналу похибки системи в момент часу t1 змінює знак, тобто з цього моменту часу за своїм знаком стає протилежним по відношенню до знаку сигналу похибки, ключ лишається замкненим і привід відпрацьовує похибку з межевою швидкістю. Перетворюючий пристрій, окрім визначення і порівняння знаків сигналів похибки слідкуючої системи і її похідної, додатково порівнює їх поточні значення за абсолютною величиною. За умов, коли значення сигналу похідної від сигналу похибки системи перевищує абсолютне значення самого сигналу похибки системи, керуючий сигнал на виході перетворюючого пристрою відсутній. За умов неспівпадання знаків у момент рівності абсолютних величин зазначених сигналів, на виході перетворюючого пристрою з'являється імпульс керуючого сигналу, який відмикає ключ. У цей момент сигнал з виходу датчика швидкості надходить до замкненого контуру. Оскільки коректуючий сигнал, рівень якого обрано значно більшим, ніж рівень сигналу похибки системи, складається з протилежним знаком із сигналом похибки системи, сигнал на виході суматора і підсилювача змінює знак на протилежний. Завдяки створенному таким чином режиму противключення і глибокому жорсткому від'ємному зворотному зв'язку здійснюється різке гальмування двигуна. Закінчення керуючого імпульсу визначено моментом, коли сигнал похідної від сигналу похибки системи дорівнює деякому пороговому значенню. Даний пристрій характеризується складністю реалізації, використовує диференціювання сигналу похибки системи, як правило, не звільненого від шумів та вад, і не забезпечує повного усунення перерегулювання. З відомих пристроїв найбільш близьким за технічною суттю до пристрою, що заявляється, є слідкуюча система, яка реалізує спосіб оптимізації перехідного процесу, яка наведена у заявці в Україні №2005054308 від 13.05.2003p. під назвою «Спосіб оптимізації перехідного процесу і пристрій для його реалізації». Даний пристрій обраний авторами як прототип. Структурну схему зазначеної слідкуючої систем - прототипа наведено на Фіг.1. Слідкуюча система прототип включає вимірювач неузгодженості 1, перший суматор 2, підсилювач 3, двигун 4, диференціатор 20, датчик швидкості 21, а також коректуючий блок 7, до складу якого входять квадратор 8, другий суматор 9, випрямляючий модуль10, пороговий компаратор 11, релейний модуль 12, елемент «І» 13, блок виділення знака 14, блок множення 22 та третій суматор 23. Неінвертуючий вхід вимірювача неузгодженості 1 і вхід диференціатора 20 з'єднані з задатчиком вхідної дії системи (на Фіг.1 не наведений), вихід вимірювача неузгодженості 1 через послідовно з'єднані перший суматор 2 та підсилювач 3 підключений до входу двигуна 4, вихід якого з'єднаний з інвертуючим входом вимірювача неузгодженості 1 і входом датчика швидкості 21. Вихід диференціатора 20 з'єднаний з неінвертуючим першим входом третього суматора 23, інвертуючий другий вхід якого з'єднаний з виходом датчика швидкості 21, а вихід - через послідовно з'єднаний квадратор. 8 підключений до першого неінвертуючого входу другого суматора 9, вихід якого через релейний модуль 12, елемент «І» 13 τρ блок множення 22 з'єднаний з другим інвертуючим входом першого суматора 2. Одночасно вихід вимірювача неузгодженості 1 з'єднаний відповідно із входами випрямляючого модуля 10 і блока виділення знака 14, вихід якого з'єднаний із другим входом блока множення 22. Вихід випрямляючого модуля 10 підключений до інвертуючого другого входу другого суматора 9 і через пороговий компаратор 11 з'єднаний із другим входом елемента «І» 13. При відпрацьовуванні керуючих сигналів повільної зміни a(t) за умов усталеного режиму величина похибки системи θ(t) близька до нуля і не перевищує заданого значення сигналу Uпор. в пороговому компараторі 11. Таким чином, сигнал на виходах порогового компаратора 11, елемента «І» 13 та блока множення 22 дорівнює нулю, тобто коректуючий сигнал на виході коректуючого блока 7 відсутній. Слідкуюча система працює як лінійна система з малою похибкою керування. За наявності стрибкоподібної (ступінчастої) зміни похибки системи, викликаної стрибком координати вхідної дії a(t), система починає відпрацьовувати її, надаючи розгону двигуну 4 до максимальної швидкості. Водночас третій суматор 23 формує сигнал, пропорційний різниці вихідних сигналів диференціатора 20 a(t) і датчика швидкості 21 b(t). Квадратор 8 в свою чергу формує сигнал Uкв, пропорційний квадрату різниці вихідних сигналів диференціатора 20 і датчика швидкості 21. Випрямляючий модуль 10 формує сигнал, пропорційний модулю сигнала похибки системи Uм. Другий суматор 9 виконує порівняння амплітудних значень сигналів на виході квадратора 8 Uкв і випрямляючого модуля 10 Uм. Якщо поточне значення сигналу на виході квадратора 8 Uк менше поточного значення сигналу на виході випрямляючого модуля 10 Uм, то значення сигналу на виході другого суматора 9, який надходить на вхід релейного модуля 12, менше нуля. Внаслідок цього сигнал на виході релейного модуля 12 рівний нулю, і відповідно до цього сигнали на виходах елемента «І» 13 та блока множення 22 також дорівнюють нулю, тобто коректуючий сигнал на виході коректуючого блока 7 відсутній. За умов, коли значення сигналу на виході квадратора 8 Uкв перевищує амплітудне значення сигналу на виході випрямляючого модуля 10 Uм, на виході релейного модуля 12 з'являється додатний сигнал. Якщо за цих умов сигнал на виході випрямляючого модуля 10 Uм перевищує значение еталонного сигналу Uпор., сигнал на виході порогового компаратора 11 має також додатне значення. У цьому випадку напруга на виході елемента «І» 13 має додатне значення. При цьому вихідний сигнал блока множення 22 стає відмінним від нуля. Знак коректуючого сигналу, наприклад, прямокутного імпульса, на виході блока множення 22 відповідає знаку сигнала похибки системи, який формується блоком виділення знаку 14, вихідний сигнал якого надходить на другий вхід блока множення 22. Довжина коректуючого сигналу на виході коректуючого блока 7 встановлюється автоматично, залежить від наявності додатного сигналу на виході порогового компаратора 11 і відповідає довжині проміжка часу, протягом якого вихідний сигнал на виході квадратора 8 Uкв перевищує поточне значення сигналу на виході випрямляючого модуля 10 Uм. Сигнал з виходу коректуючого блока 7 алгебраїчно сумується з сигналом похибки системи. Рівень напруги коректуючого сигналу на виході блока множення 22 обирається таким, щоб після його надходження на вхід першого суматора 2, підсилювач 3 насичувався до напруги протилежного знака, внаслідок чого здійснюється гальмування двигуна 4. Розглянута слідкуюча система-прототип має недолік, який полягає в тому, що для формування гальмуючого моменту двигуна підчас відпрацьовування стрибка дії (або її похідної), що задається, необхідно, щоб амплітуда коректуючого сигналу на виході блока множення 22 значно перевищувала рівень вхідного сигналу підсилювача 3, що обмежує зменшення перерегулювання і збільшує тривалість перехідного процесу системи, і тим самим ускладнює реалізацію коректуючого блока 7. В основу винаходу поставлено завдання створити таку слідкуючу систему, в якій для оптимізації перехідного процесу за умов стрибків вхідної дії (або її похідної), що задається, тривалість перехідного процесу і перерегулювання вихідної дії системи зменшувалися завдяки підвищенню швидкодії системи при формуванні моменту гальмування двигуна. Завдання підвищення швидкодії слідкуючої системи при формуванні моменту гальмування двигуна і спрощення реалізації коректуючого блока системи розв'язується завдяки тому, що в слідкуючу систему, яка включає вимірювач неузгодженості, перший суматор, підсилювач, двигун і коректуючий блок, до складу якого входять квадратор, другий суматор, випрямляючий модуль, пороговий компаратор, релейний модуль та елемент «І», в якому вихід першого суматора через підсилювач з'єднаний із входом двигуна, неінвертуючий вхід вимірювача неузгодженості з'єднаний із задавачем вхідної дії, а його вихід через випрямляючий модуль з'єднаний із входом порогового компаратора та інвертуючим першим входом другого суматора, неінвертуючий другий вхід якого з'єднаний з виходом квадратора, а вихід - через релейний модуль з'єднаний з першим входом елемента «І», другий вхід якого з'єднаний з виходом порогового компаратора, до її складу введені датчик кута, функціональний кодуючий перетворювач, перший і другий перетворювачі "код-напруга", коректуючому блоку надані другий і третій елементи «І», індикатор знака «+» та індикатор знака «-», а підсилювачу - додаткові другий і третій керуючі входи, при цьому вихід вимірювача неузгодженості з'єднаний з об'єднаними входами індикатора знака «+» та індикатора знака «-» і через перший перетворювач "коднапруга" - з неінвертуючим першим входом першого суматора, а вихід двигуна через механічно зв'язаний з ним датчик кута з'єднаний із входом функціонального кодуючого перетворювача, перший вихід якого з'єднаний із входом квадратора і через другий перетворювач "код-напруга" з'єднаний з інвертуючим другим входом першого суматора, другий вихід функціонального кодуючого перетворювача з'єднаний з інвертуючим, входом вимірювача неузгодженості, неінвертуючий вхід якого підключений до цифрового задавача вхідної дії, вихід першого елемента «І» з'єднаний з об'єднаними першими входами другого і третього елементів «І», вихід індикатора знака «+» з'єднаний з другим входом другого елемента «І», вихід якого з'єднаний з керуючим другим входом підсилювача, вихід індикатора знака «-» з'єднаний з другим входом третього елемента «І», вихід якого з'єднаний з керуючим третім входом підсилювача. Введення в систему функціонального кодуючого перетворювача, а також двох перетворювачів "коднапруга", дозволяє реалізувати побудову цифро-аналогової слідкуючої системи і виконати коректуючий блок у цифровому варіанті. Введення функціонального кодуючого перетворювача, який формує код кута і код швидкості відпрацьовування, дозволяє виключити із складу пристрою датчик швидкості, завдяки чому поліпшуються якісні характеристики швидкісного контура слідкуючої системи (можливість розширення смуги пропускання внутрішнього контура обмежена в технічному рішенні - прототипі смугою пропускання аналогового датчика швидкості). Введення першого перетворювача "код-напруга" дозволяє формувати сигнал напруги, пропорційний коду похибки неузгодженості слідкуючої системи. Введення другого перетворювача "код-напруга" дозволяє формувати сигнал напруги, пропорційний коду швидкості відпрацьовування слідкуючої системи, який використовується для реалізації коректуючого жорсткого від'ємного зворотного зв'язку за швидкістю. Введення в коректуючий блок другого і третього елементів «І», а також індикатора знака "+" та індикатора знака "-" дозволяє реалізувати два логічних сигнали керування для зміни структури слідкуючої системи (керування підсилювачем слідкуючої системи), що дозволяє значно спростити реалізацію цього коректуючого блока. Надання підсилювачу додаткових другого і третього керуючих входів за наявності відповідних логічних сигналів керування на виході коректуючого блока дозволяє реалізувати миттєву напругу насичення підсилювача відповідної полярності, внаслідок чого підвищується швидкодія слідкуючої системи при формуванні гальмуючого моменту двигуна. Усі блоки і вузли слідкуючої системи виконані на основі елементної бази серійного випуску. Кожна нова введена ознака є суттєвою і необходною, а сукупність нових введених ознак з відомими ознаками прототипа та їх певний взаємозв'язок між собою створює достатню сукупність ознак запропонованої слідкуючої системи, що дозволяє забезпечити розв'язання поставленого завдання, тобто поліпшити швидкодію слідкуючої системи при формуванні моменту гальмування двигуна, і тим самим забезпечити зменшення величини перерегулювання та тривалості перехідного процесу при відпрацьовуванні слідкуючою системою стрибка дії (або її похідної), яка задається. Співставлювальний аналіз з прототипом вказує на те, що пристрій, який заявляється, відрізняється від прототипа введенням нових блоків: датчика кута, функціонального кодуючого перетворювача, першого та другого перетворювачів "код-напруга", а також введенням до коректуючого блоку індикатора знака «+», індикатора знака «-», другого і третього елементів «І». Таким чином, пристрій, що заявляється, відповідає критерію винаходу «новизна». Порівняння запропонованого технічного рішення з іншими відомими технічними рішеннями виявляє, що введені блоки у зазначеному зв'язку з іншими елементами слідкуючої системи дозволяють поліпшити водночас два з основних її параметри, а саме: забезпечують зменшення величини перерегулювання та тривалості перехідного процесу при відпрацьовуванні стрибка вхідної дії системи, завдяки підвищенню швидкодії системи при формуванні моменту гальмування двигуна. Таким чином, пристрій, що заявляється відповідає критерію «винахідницький рівень». Суть винаходу пояснюється кресленнями, на яких наведені: на Фіг.1 - структурна схем слідкуючої системи - прототипа; на Фіг.2 - структурна схема слідкуючої системи, що заявляється; на Фіг.3 - часові діаграми, які ілюструють роботу запропонованої слідкуючої системи при відпрацьовуванні стрибків вхідної дії. На блок-схемі запропонованої слідкуючої системи і часових діаграмах, які ілюструють її роботу (див. Фіг.2 та Фіг.3), позначені: a(t) - вхідна дія слідкуючої системи, закон змін якої (див. Фіг.3) має вигляд: ì180град. при 0 < t 2. 5 c; b(t) - вихідна (відпрацьована) дія слідкуючої системи; b(t) - похідна вихідної (відпрацьованої) дії слідкуючої системи; θ(t) - похибка системи; Uм - сигнал, сформований на виході випрямляючого модуля 10 ; Uкв. - сигнал, сформований на виході квадратора 8; Uпор. - еталонний сигнал порогового компаратора 11; U+ -сигнал на виході індикатора знака «+» 14; U- - сигнал на виході індикатора знака «-» 15; Uкор.1 - коректуючий сигнал системи (сигнал на виході елемента «І» 16); Uкop.2 - коректуючий сигнал системи (сигнал на виході елемента «І» 17). Функціональна схема запропонованого пристрою наведена на Фіг.2. Слідкуюча система включає до свого складу вимірювач неузгодженості 1, перший суматор 2, підсилювач 3, двигун 4, датчик кута 5, функціональний кодуючий перетворювач 6 і коректуючий блок 7, який включає квадратор 8, другий суматор 9, випрямляючий модуль 10, пороговый компаратор 11, релейний модуль 12, перший елемент «І» 13, індикатор знака «+» 14, індикатор знака «-» 15, другий елемент «І 16, третій елемент «І» 17, перший і другий перетворювачі «код-напруга» відповідно 18, 19. Неінвертуючий вхід вимірювача неузгодженості 1 з'єднаний з цифровим задавачем кода вхідної дії (на Фіг.2 не наведений). Вихід вимірювача неузгодженості 1 з'єднаний з об'єднаними входами індикатора знака «+» 14 та індикатора знака «-» 15 і через випрямляючий модуль 10 з'єднаний з входом порогового компаратора 11 та інвертуючим першим входом другого суматора 9, а також через послідовно з'єднані перший перетворювач "код-напруга" 18, перший суматор 2, підсилювач 3, двигун 4 та датчик кута 5, механічно зв'язаний з валом двигуна 4, з'єднаний з входом функціонального кодуючого перетворювача 6, перший вихід (формуючий код швидкості вихідної дії системи b(t)) якого з'єднаний безпосередньо із входом квадратора 8 і через другий пертворювач "код-напруга" 19 - з інвертуючим другим входом першого суматора 2. Другий вихід (формуючий код кута вихідної дії системи b(t)) функціонального кодуючого перетворювача 6 з'єднаний з інвертуючим входом вимірювача неузгодженості 1. Вихід квадратора 8 з'єднаний з другим неінвертуючим входом другого суматора 9, вихід якого через релейний модуль 12 з'єднаний з першим входом першого елемента «І» 13, другий вхід якого підключений до виходу порогового компаратора 11, а вихід - з'єднаний з об'єднаними першими входами другого елемента «І» 16 і третього елемента «І» 17, вихід індикаторазнака «+» 14 з'єднаний з другим входом другого елемента «І» 16, вихід якого з'єднаний з керуючим другим входом підсилювача 3, вихід індикатора знака «-» 15 з'єднаний з другим входом третього елемента «І» 17, вихід якого з'єднаний з керуючим третім входом підсилювача 3. Усі елементи коректуючого блока 7, а також вимірювач неузгодженості 1 можуть бути виконані на основі серійно вироблених великих інтегральних схем, наприклад, ПЛІС серії «Altera». Слідкуюча система, що заявляється, працює таким чином. При відпрацьовуванні керуючих сигналів повільної зміни a(t) в усталеному режимі величина похибки слідкуючої систем θ(t) близька до нуля, модуль сигналу похибки Uм, що формується випрямляючим модулем 10, не перевищує значення сигналу Uпор., яке задається у пороговому компараторі 11. Таким чином, сигнал на виході порогового компаратора 11, виходах усіх елементів «І», відповідно 13, 16, 17, дорівнює нулю, тобто значення коректуючих сигналів Uкор.1 та Uкор.2 (див.Фіг.3) на виході коректуючого блока 7 дорівнюють нулю. Слідкуюча система працює як лінійна система автоматичного регулювання з малою похибкою керування. За наявності стрибкоподібної (ступінчастої) зміни сигналу похибки, тобто сигналу на виході вимірювача неузгодженості 1, викликаного стрибком координати вхідної дії a(t) в моменти часу t=0c (a(t) змінюється від 0 град до 180 град) и t=2.5c (a(t) змінюється від 180 град до 0 град), слідкуюча система (див.Фіг.3а) починає відпрацьовувати його, здійснюючи розгін двигуна 4 до максимальної швидкості (див. Фіг.3б, моменти часу від t=0c до t1, а також від t=2.5c до t3). Одночасно квадратор 8 формує сигнал Uкв, пропорційний квадрату швидкості вихідної дії системи b(t), який вимірюється функціональним перетворювачем 6. Другий суматор 9 здійснює порівняння амплітудних значень сигналів на виході квадратора 8 Uкв и випрямляючого модуля 10 Uм. На часовому інтервалі від t=0c до t1 і від t=2.5c до t3 (див. Фіг.3б) амплітудне значення сигналу на виході квадратора 8 Uк меньше у порівнянні із значенням сигналу на виході випрямляючого модуля 10 Uм. Таким чином, сигнал на виході другого суматора 9, який надходить на вхід релейного модуля 12, менше нуля. Завдяки цьому сигнал на виході релейного модуля 12 дорівнює нулю, тобто і сигнали на виходах першого елемента «І» 13, другого елемента «І» 16 і третього елемента «І» 17 також равні нулю, значення коректуючих сигналів Uкор.1 та Uкор.2 при цьому на виході коректуючого блока 7 також рівні нулю. За умов, коли значення сигналу на виході квадратора 8 Uкв, перевищує амплітудне значення сигналу на виході випрямляючого модуля 10 Uм, тобто Uкв > Uм (на часовому інтервалі від t1 до t2 і від t3 до t4, див.Фіг.3б), на виході релейного модуля 12 з'являєтся додатний сигнал. На часовому інтервалі, коли сигнал на виході випрямляючого модуля 10 Uм перевищує значення еталонного сигналу Uпор., сигнал на виході порогового компаратора 11 має додатне значення. У цьому випадку напруга на виході першого елемента «І» 13 має також додатне значення. В залежності від знака поточного значення сигналу похибки на виході індикатора знака «+» 14 або індикатора знака «-» 15 з'являється додатний сигнал. Відповідно до цього на виході другого елемента «І» 16 або третього елемента «І» 17 формується додатне значення коректуючого сигналу Uкор.1 або Uкор.2. (див. Фіг.3в, Фіг.3г). Довжина коректучого сигналу Uкop.1 або Uкоp.2 відповідає тривалості проміжку часу, протягом якого сигнал на виході квадратора 8 Uкв перевищує поточне значення сигналу на виході випрямляючого модуля 10 Uм, тобто встановлюється автоматично. За наявності коректуючого сигналу Uкop.1 або Uкоp.2 на виході коректуючого блока 7 підсилювач миттєво перемикається у режим насичення напруги, знак якої протилежний до знаку сигналу похибки слідкуючої системи, внаслідок чого здійснюється гальмування двигуна 4. При здійсненні гальмування двигуна 4 відбувається зменшення значення сигналу на виході квадратора 8. Знак сигналу на виході другого суматора 9 змінюється знову на від'ємний, внаслідок чого сигнал на виході релейного модуля 12 приймає значення, рівне нулю. У зв'язку з цим сигнал на виході першого елемента «І» 13, а разом з цим і сигнал на виходах другого елемента «І» 16 і третього елемента «І» 17 також приймає нульове значення. При надходженні на вхід двигуна 4 підсиленого сигналу з виходу першого суматора 2 він починає розгін. Сигнал на виході квадратора 8 Uкв зростає, і за умов, коли його поточне значення перевищує значення сигналу на виході випрямляючого модуля 10 Uм, процес гальмування двигуна 4 повторюється. Як результат створення режиму рівноприскореного гальмуваннядвигуна 4 відбувається зменшення сигналу похибки системи q(t). Закінчення формування коректуючого сигналу Uкop.1 або Uкоp.2 при наближенні вихідної дії системи b(t) до усталеного значення визначається моментом рівності сигналу похибки системи Uм деякому пороговому значенню (еталонному сигналу Uпор.) в пороговому компараторі 11. У цьому випадку (момент часу від t2 до t=2.5 с і t>t4, див. Фіг.3б) сигнал на виході порогового компаратора 11 стає рівним нулю і, таким чином, блокується формування, коректуючих сигналів Uкop.1 або Uкор.2, які спричиняють гальмування двигуна 4. При цьому швидкість двигуна 4 - незначна і перерегулювання вихідної дії системи b(t) практично відсутнє. Значення порогу Uпop. в пороговому компараторі 11 необхідно обирати мінімальним, але достатнім для того, щоб в усталеному режимі імпульси Uкор.1 або Uкор.2 не з'являлися на виході коректуючого блока 7. Таким чином, у запропонованій слідкуючій системі перехідний процес, викликаний стрибкоподібною зміною координати вхідної дії (або її похідної) в цифровій формі, коректується миттєвим переключенням підсилювача 3 у режим насичення, внаслідок чого на його виході формуються, наприклад, прямокутні імпульси відповідної полярності, які викликають гальмування двигуна 4, при цьому має місце автоматичне регулювання терміну їх впливу. При цьому момент початку гальмування двигуна 4 обирається автоматично. При зниженні похибки до порогового значення швидкість відпрацьовування двигуна 4 зменшена до усталеного значення (у даному випадку до нуля), внаслідок чого відбувається відключення коректуючих сигналів Uкор.1 або Uкор.2
ДивитисяДодаткова інформація
Назва патенту англійськоюTracking system
Автори англійськоюKorsun Valentyn Petrovych, Kralin Volodymyr Vsevolodovych, Motuz Heorhii Ivanovych, Steba Oleksandr Mykhailovych, Stefanovych Viktor Tarasovych
Назва патенту російськоюСледящая система
Автори російськоюКорсун Валентин Петрович, Кралин Владимир Всеволодович, Мотуз Георгий Иванович, Стеба Александр Михайлович, Стефанович Виктор Тарасович
МПК / Мітки
МПК: G05B 11/00, G05B 11/01
Код посилання
<a href="https://ua.patents.su/6-63756-slidkuyucha-sistema.html" target="_blank" rel="follow" title="База патентів України">Слідкуюча система</a>
Слідкуюча система
Номер патенту: 62671
Опубліковано: 15.12.2003
Автори: Соколов Юрий Миколайович, Субота Анатолій Максимович, Мухлаєв Сергій Вікторович, Клименко Віталій Валерійович
МПК: G05B 19/02, F15B 9/00, G05B 11/01, G06F 11/07
Формула / Реферат:
Слідкуюча система, що містить датчик положення вхідного вала, датчик положення вихідного вала, вимірювач неузгодження, підсилювач, привід навантаження, яка відрізняється тим, що додатково містить мікроконтролер, який через узгоджуючий інтерфейс з'єднаний з входом крокового двигуна, вихідний вал якого через редуктор і кінематичний зв'язок з'єднаний з ротором датчика положення вхідного вала, вихід якого через перший підсилювач з'єднаний з одним...
Копіювальна слідкуюча система пропорційного керування для металорізальних верстатів
Номер патенту: 9773
Опубліковано: 30.09.1996
Автори: Дубров Борис Іванович, Лавріненко Анатолій Костянтинович
МПК: B23Q 35/00
Мітки: металорізальних, копіювальна, верстатів, система, керування, пропорційного, слідкуюча
Формула / Реферат:
(57) Копировальная следящая система пропорционального управления для металлорежущих станков, содержащая копировальный датчик, предварительный усилитель-выпрямитель, усилители сигналов задающего и следящего каналов и электроприводов, отличающаяся тем, что она снабжена дистанционным регулятором чувствительности датчика, преобразователем уровня, блоком выделения модуля сигнала и нелинейными блоками, причем вход регулятора чувствительности...
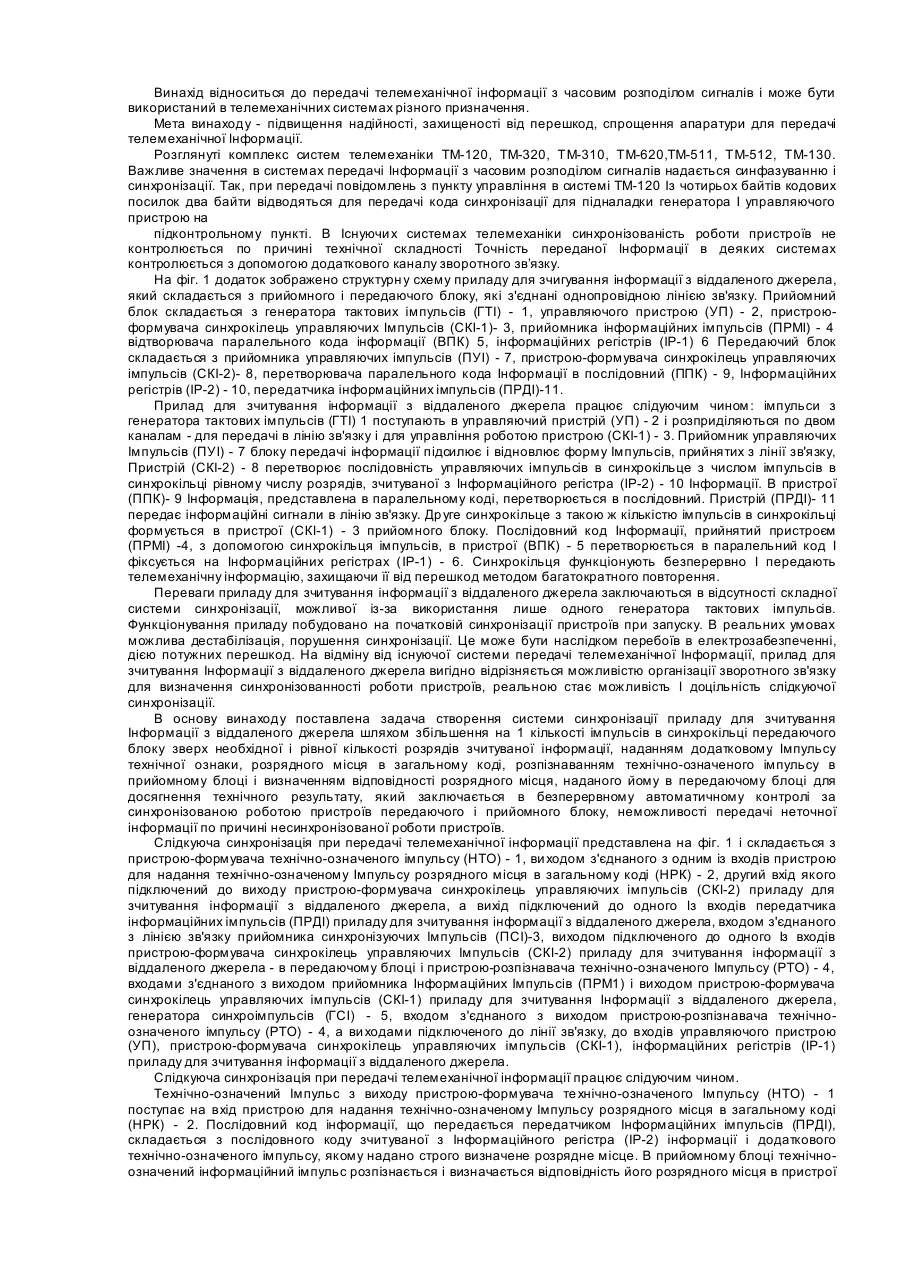
Слідкуюча синхронізація при передачі телемеханічної інформації
Номер патенту: 22679
Опубліковано: 07.04.1998
Автор: Шовкопляс Іван Петрович
МПК: H04J 3/00
Мітки: інформації, синхронізація, телемеханічної, слідкуюча, передачі
Формула / Реферат:
Слідкуюча синхронізація при передачі телемеханічної інформації, яка складається з генератора синхроімпульсів, входом з'єднаного з виходом пристрою розпізнавача технічно-означеного імпульсу, а виходом підключеного до лінії зв'язку, до входів управляючого пристрою, пристрою-формувача синхрокілець управляючих Імпульсів, інформаційних регістрів приладу для зчитування інформації з віддаленого джерела - в прийомному блоці і входом з'єднаного з...
Адаптивна резервована система
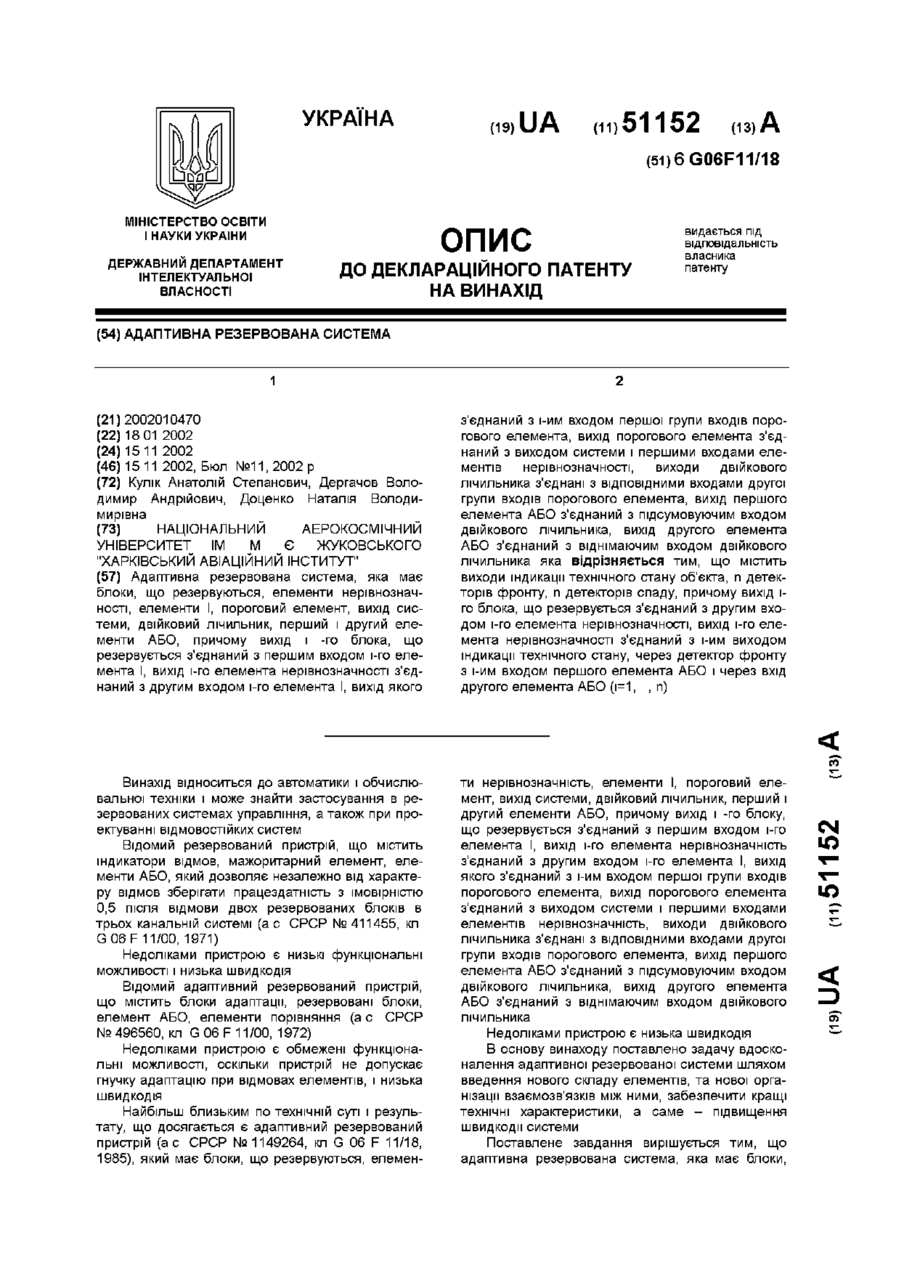
Номер патенту: 51152
Опубліковано: 15.11.2002
Автори: Кулік Анатолій Степанович, Дергачов Володимир Андрійович, Доценко Наталія Володимирівна
МПК: G06F 11/18
Мітки: адаптивна, система, резервована
Формула / Реферат:
Адаптивна резервована система, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, двійковий лічильник, перший і другий елементи АБО, причому вихід і -го блока, що резервується з'єднаний з першим входом і-го елемента І, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І, вихід якого з'єднаний з і-им входом першої групи входів порогового елемента, вихід порогового...
Система керування
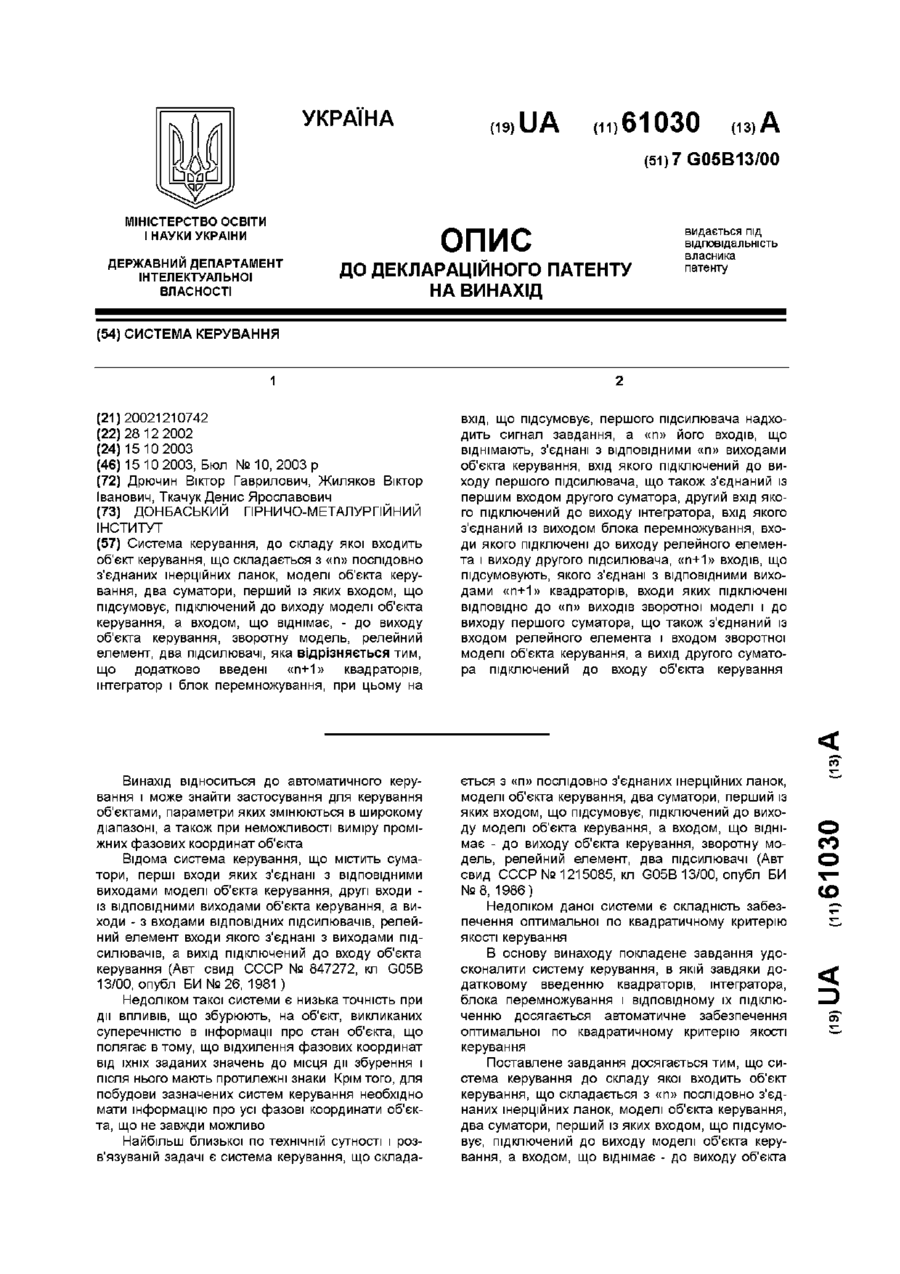
Номер патенту: 61030
Опубліковано: 15.10.2003
Автори: Дрючин Віктор Гаврилович, Жиляков Віктор Іванович, Ткачук Денис Ярославович
МПК: G05B 13/00
Формула / Реферат:
Система керування, до складу якої входить об'єкт керування, що складається з «n» послідовно з'єднаних інерційних ланок, моделі об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а входом, що віднімає, - до виходу об'єкта керування, зворотну модель, релейний елемент, два підсилювачі, яка відрізняється тим, що додатково введені «n+1» квадраторів, інтегратор і блок...
Попередній патент: Привід транспортного засобу
Наступний патент: Подвійний основов’язаний еластичний трикотаж
Випадковий патент: Спосіб повірки терморезистивних перетворювачів і пристрій для його здійснення