Слідкуюча система
Номер патенту: 79546
Опубліковано: 25.06.2007
Автори: Стефанович Віктор Тарасович, Корсун Валентин Петрович, Стеба Олександр Михайлович, Кралін Володимир Всеволодович, Мотуз Георгій Іванович


Формула / Реферат
Слідкуюча система, яка включає вимірювач неузгодженості, перший і другий суматори, перший і другий перетворювачі "код-напруга", підсилювач, двигун, датчик кута, функціональний кодуючий перетворювач і коректуючий блок, до складу якого входять блок масштабуючого коефіцієнта, перший і другий випрямляючі модулі, пороговий компаратор і блок множення, при цьому вихід першого суматора через перший перетворювач «код-напруга» підключений до неінвертованого першого входу другого суматора, вихід якого через послідовно з'єднані підсилювач, двигун і механічно зв'язаний з двигуном датчик кута підключений до входу функціонального кодуючого перетворювача, перший вихід якого через другий перетворювач "код-напруга" з'єднаний із інвертуючим другим входом другого суматора, другий вихід функціонального кодуючого перетворювача з'єднаний з інвертуючим першим входом вимірювача неузгодженості, неінвертуючий другий вхід якого підключений до цифрового задавача вхідної дії, а вихід вимірювача неузгодженості підключений до неінвертованого першого входу першого суматора і через послідовно з'єднані перший випрямляючий модуль і пороговий компаратор підключений до першого входу блока множення, другий вхід якого з'єднаний із виходом другого випрямляючого модуля, вхід якого підключений до третього входу блока множення, вихід якого з'єднаний з неінвертованим другим входом першого суматора, яка відрізняється тим, що в коректуючий блок введено інвертор, вхід якого підключений до виходу блока масштабуючого коефіцієнта, а вихід підключений до входу другого випрямляючого модуля і третього входу блока множення, при цьому перший вихід функціонального кодуючого перетворювача з'єднаний із входом блока масштабуючого коефіцієнта.
Текст
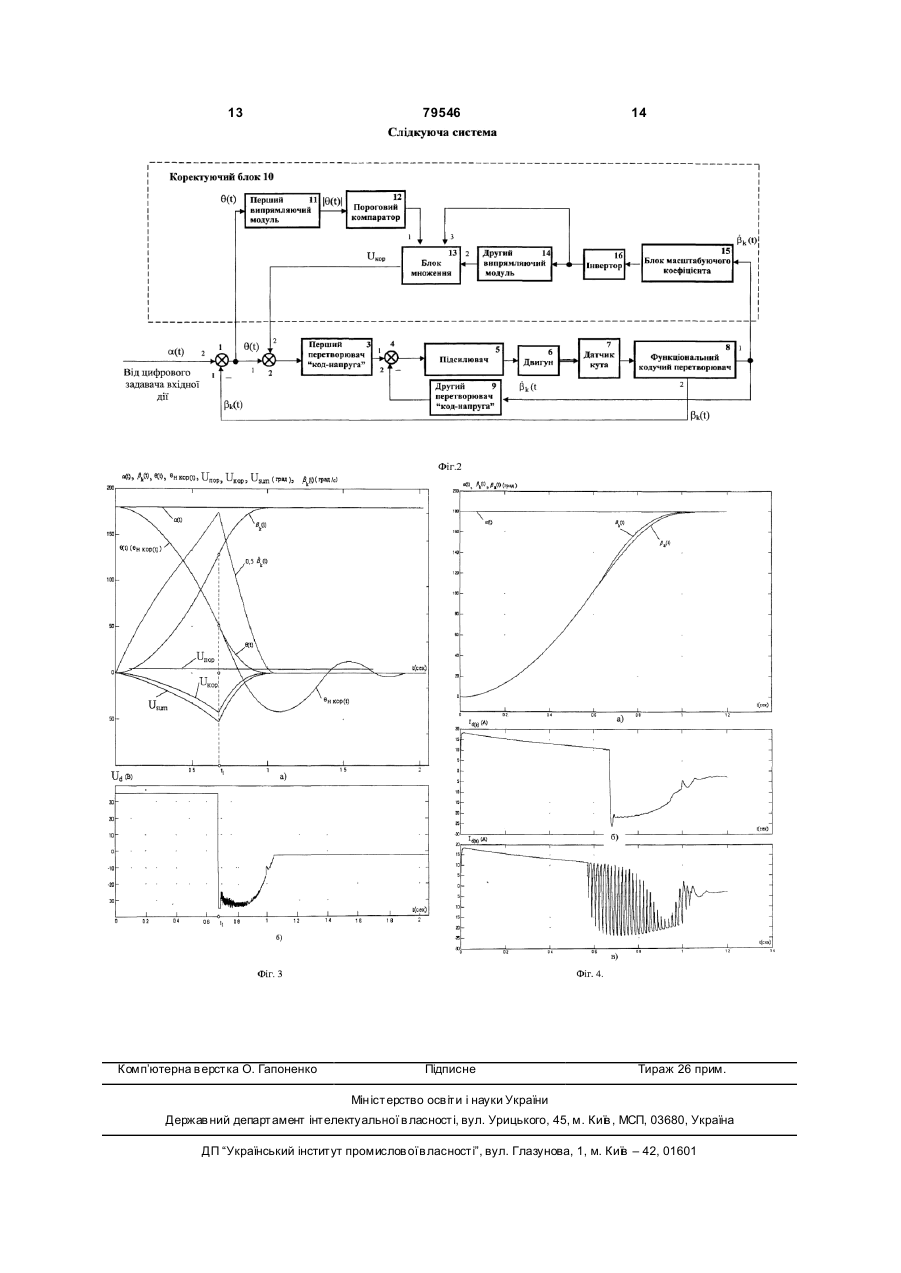
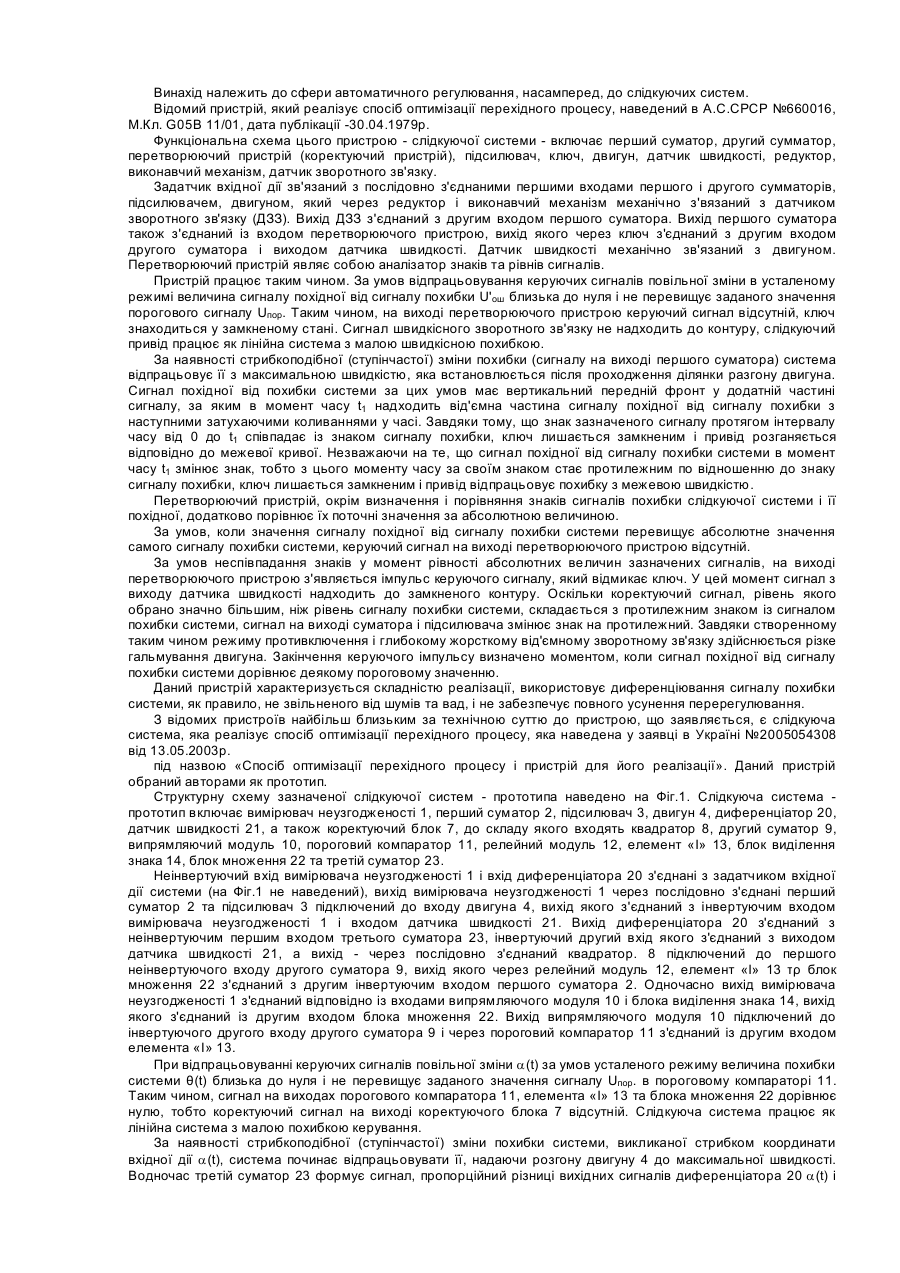
Слідкуюча система, яка включає вимірювач неузгодженості, перший і другий суматори, перший і другий перетворювачі "код-напруга", підсилювач, двигун, датчик кута, функціональний кодуючий перетворювач і коректуючий блок, до складу якого входять блок масштабуючого коефіцієнта, перший і другий випрямляючі модулі, пороговий компаратор і блок множення, при цьому ви хід першого суматора через перший перетворювач «коднапруга» підключений до неінвертованого першого входу др угого суматора, вихід якого через послідовно з'єднані підсилювач, двигун і механічно зв'я C2 2 (19) 1 3 79546 4 Таким чином, на виході перетворюючого пристрою го складу вимірювач неузгодженості 1, перший керуючий сигнал відсутній, ключ знаходиться у суматор 2, перший перетворювач «код-напруга» 3, замкненому стані. Сигнал швидкісного зворотного другий суматор 4, підсилювач 5, двигун 6, датчик зв'язку не надходить до контуру, слідкуючий прикута 7, функціональний кодуючий перетворювач 8, від працює як лінійна система з малою щвидкісною другий перетворювач «код-напруга» 9 і коректуюпохибкою. чий блок 10, який включає перший випрямляючий За наявності стрибкоподібної (ступінчастої) модуль 11, пороговий компаратор 12, блок мнозміни похибки (сигналу на виході першого суматоження 13, другий випрямляючий модуль 14, блок ра) система відпрацьовує її з максимальною швимасштабуючого коефіцієнта 15, блок затримки 20, дкістю, яка встановлюється після проходження третій суматор 21, ключ 22 та фіксатор 23. ділянки розгону двигуна. Сигнал похідної від похиНеінвертуючий вхід вимірювача неузгодженобки системи за цих умов має вертикальний передсті 1 з'єднаний з цифровим задавачем кода вхідної ній фронт у додатній частині сигналу, за яким в дії (на Фіг.1 не наведений). Вихід вимірювача немомент часу t1 надходить від'ємна частина сигналу узгодженості 1 з'єднаний з об'єднаними входами похідної від сигналу похибки з наступними затухапершого випрямляючого модуля 11, блока масшючими коливаннями у часі. Завдяки тому, що знак табуючого коефіцієнта 15, та неінвертуючим перзазначеного сигналу протягом інтервалу часу від 0 шим входом першого суматора 2, вихід якого чедо t1 співпадає із знаком сигналу похибки, ключ рез послідовно з'єднані перший перетворювач лишається замкненим і привід розганяється відпо"код-напруга" 3, другий суматор 4, підсилювач 5, відно до межової кривої. Незважаючи на те, що двигун 6 та датчик кута 7, механічно зв'язаний з сигнал похідної від сигналу похибки системи в мовалом двигуна 6, з'єднаний із входом функціонамент часу t1 змінює знак, тобто з цього моменту льного кодуючого перетворювача 8, перший вихід часу за своїм знаком стає протилежним по відно(на якому сформовано код швидкості вихідної дії шенню до знаку сигналу похибки, ключ лишається системи) якого з'єднаний через другий пертворюзамкненим і привід відпрацьовує похибку з межовач "код-напруга" 9 з інвертуючим другим входом вою швидкістю. другого суматора 3. Другий ви хід функціонального Перетворюючий пристрій, окрім визначення і кодуючого перетворювача 8 (на якому сформовапорівняння знаків сигналів похибки слідкуючої сисно код кута вихідної дії системи) з'єднаний з інвертеми і її похідної, додатково порівнює їх поточні туючим входом вимірювача неузгодженості 1. значення за абсолютною величиною. Вихід першого випрямляючого модуля 11 чеЗа умов, коли значення сигналу похідної від рез пороговий компаратор 12 підключений до сигналу похибки системи перевищує абсолютне першого входу блока множення 13. значення самого сигналу похибки системи, керуюВихід блока масштабуючого коефіцієнта 15 чий сигнал на виході перетворюючого пристрою через блок затримки 20 з'єднаний з інвертуючим відсутній. першим входом третього суматора 21, другий вхід За умов неспівпадання знаків у момент рівноякого підключений до входу блока затримки 20, а сті абсолютних величин зазначених сигналів на вихід - через послідовно з'єднані ключ 22, фіксатор виході перетворюючого пристрою з'являється ім23 і другий випрямляючий модуль 14 з'єднаний з пульс керуючого сигналу, який відмикає ключ. У другим входом блока множення 13, третій вхід цей момент сигнал з виходу датчика швидкості якого підключений до виходу фіксатора 23. Вихід надходить до замкненого контуру. Оскільки корекблока множення 13 з'єднаний з неінвертованим туючий сигнал, рівень якого обрано значно більдругим входом першого суматора 2. шим, ніж рівень сигналу похибки системи, складаСлідкуюча система - прототип працює таким ється з протилежним знаком із сигналом похибки чином. системи, сигнал на виході суматора і підсилювача При відпрацюванні керуючих сигналів повільзмінює знак на протилежний. Завдяки створеному ної зміни a(t) в усталеному режимі величина похитаким чином режиму противключення і глибокому бки слідкуючої систем q(t) на ви ході вимірювача жорсткому від'ємному зворотному зв'язку здійснюнеузгодженості 1 близька до нуля, тому модуль ється різке гальмування двигуна. Закінчення керусигналу похибки q(t), що формується першим виючого імпульса визначено моментом, коли сигнал прямляючим модулем 11, не перевищує значення похідної від сигналу похибки системи дорівнює еталонного сигналу, який задається у пороговому деякому пороговому значенню. компараторі 12. Таким чином, сигнал на виході Даний пристрій характеризується складністю порогового компаратора 12 дорівнює нулю, тобто реалізації, використовує диференціювання сигназначення коректуючого сигналу на ви ході блоку лу по хибки системи, як правило, не звільненого від множення 13 коректуючого блока 10 також дорівшумів та вад, і не забезпечує повного усунення нює нулю. Слідкуюча система працює як лінійна перерегулювання. система автоматичного регулювання з малою поЗ відомих пристроїв найбільш близьким за хибкою керування. технічною суттю до пристрою, що заявляється, є За наявності стрибкоподібної (ступінчастої) пристрій, який наведений у [заявці №а200505480 зміни сигналу похибки системи q(t), тобто сигналу від 08 червня 2005 року під назвою «Слідкуюча на виході вимірювача неузгодженості 1, викликасистема» МПК 7G05B11/01]. ного стрибком координати вхідної дії a(t), наприДаний пристрій обраний авторами як протоклад, додатного знаку, сигнал на виході першого тип. Структурну схему зазначеної слідкуючої сисвипрямляючого модуля 11 починає перевищува ти теми - прототипа наведено на Фіг.1. значення еталонного сигнала порогового компараСлідкуюча система - прототип включає до свотора 12. Тому сигнал на виході порогового компа 5 79546 6 ратора 12 стає додатнім. Блок масштабуючого Значення еталонного сигналу в пороговому коефіцієнта 15 та блок затримки 20 з встановлекомпараторі 12 обирається мінімальним, але доним часом затримки разом с третім суматором 21 статнім для того, щоб в усталеному режимі корекформують сигнал, пропорційний похідній похибки туючий сигнал не з'являвся на виході коректуючосистеми заданого рівня з властивостями фільтра, го блоку 10. який фіксується за допомогою ключа 22 та фіксаРозглянута слідкуюча система-прототип (як і тора 23. Далі коректуючий блок 10 слідкуючої сиссистема-аналог) характеризується складністю ретеми за допомогою другого випрямляючого модуалізації. Для формування коректуючого сигналу в ля 14 та блока множення 13 формує коректуючий такій слідкуючій системі використовується дифесигнал у вигляді знакозалежного квадрата фіксоренцювання сигналу похибки системи. Формуванваного на встановленний часом затримки значення коректуючого сигналу за допомогою пристроїв ня похідної сигнала похибки системи, який склада(блок затримки 20, третій суматор 21, ключ 22 та фіксатор 23) для диференцювання сигналу похибється з сигналом похибки q(t) в першому суматорі ки системи, як правило, не звільненого від шумів 2. Слідкуюча система починає відпрацьовувати та вад, не забезпечує повного усунення перерегутакий сумарний сигнал, здійснюючи розгін двигуна лювання при оптимізації перехідного процесу за 6 до максимальної швидкості. Амплітудне значенумов стрибків вхідної дії, що задається. ня сигналу на виході блока множення 13 (тобто значення коректуючого сигналу) у цей проміжок В основу винаходу поставлено завдання створити таку слідкуючу систему, в якій при формуванчасу менше у порівнянні із амплітудним значенням ні коректуючого сигналу для оптимізації перехідносигналу похибки на виході вимірювача неузгоджего процесу за умов стрибків вхідної дії, що ності 1, тому сигнал на ви ході першого суматора 2, задається, похідна від похибки системи регулюякий подається на вхід першого перетворювача «код-напруга» 3 додатного знаку. Сигнал на виході вання формувалась без застосування безпосереднього диференцювання похибки системи, завдядругого суматора 3, який здійснює формування ки чому якість коректуючого сигналу підвищується, алгебраїчної суми сигналів з виходів першого та а реалізація коректуючого блоку при формуванні другого перетворювачів «код напруга» (блоки 3 і моменту гальмування двигуна спрощується, в на9), за рахунок вибору рівня жорсткого від'ємного зворотного зв'язку по швидкості двигуна 6 (рівня слідок чого тривалість перехідного процесу і перерегулювання вихідної дії системи зменшуються сигнала з виходу другого перетворювача "кодзавдяки підвищенню швидкодії системи. напруга" 9) також додатного знаку. Завдання спрощення реалізації коректуючого За умов, коли амплітудне значення сигналу на блоку, підвищення швидкодії слідкуючої системи виході блока множення 13 разом з сигналом жорсткого від'ємного зворотного зв'язку на виході друта підвищення якості коректуючого сигналу при формуванні моменту гальмування двигуна розв'ягого перетворювача «код-напруга» 9 моментами зується завдяки тому, що у слідкуючій системі, яка часу перевищує амплітудне значення сигналу повключає вимірювач неузгодженості, перший і друхибки на виході вимірювача неузгодженості 1, сиггий суматори, перший і другий перетворювачі "коднал на виході другого суматора 4 (і підсилювача 5) змінює знак на протилежний, за рахунок чого понапруга", підсилювач, двигун, датчик кута, функціональний кодуючий перетворювач і коректуючий чинається миттєве гальмування двигуна 6. блок, до складу якого входять блок масштабуючоПри здійсненні гальмування двигуна 6 відбуго коефіцієнта, перший і другий випрямляючі мовається зменшення його швидкості, тобто змендулі, пороговий компаратор і блок множення, при шення рівня сигналу на першому ви ході функціонального кодуючого перетворювача 8 та другого цьому ви хід першого суматора через перший перетворювач «код-напруга» підключений до неінвеперетворювача «код-напруга» 9. Внаслідок цього ртованого першого входу другого суматора, вихід знак сигнала на виході другого суматора 4 (і підсиякого через послідовно з'єднані підсилювач, двилювача 5) змінюється знову на додатній, за рахугун і механічно зв'язаний з двигуном датчик кута нок якого двигун 6 знову починає розгін. Сигнал на виході блока множення 13 знову зростає, і за умов, підключений до входу функціонального кодуючого перетворювача, перший вихід якого через другий коли його поточне значення разом з сигналом жоперетворювач "код-напруга" з'єднаний із інвертуюрсткого від'ємного зворотного зв'язку на виході чим другим входом другого суматора, другий вихід другого перетворювача «код-напруга» 9 перевифункціонального кодуючого перетворювача з'єдщує значення сигналу на виході вимірювача неузгодженості 1, процес гальмування двигуна 6 понаний з інвертуючим першим входом вимірювача неузгодженості, неінвертуючий другий вхід якого вторюється. підключений до цифрового задавача вхідної дії, а Закінчення формування коректуючого сигналу вихід вимірювача неузгодженості підключений до на виході блока множення 13 при наближенні вихінеінвертованого першого входу першого суматора дної дії системи до усталеного значення визначається моментом рівності модуля сигнала похибки з і через послідовно з'єднанні перший випрямляючий модуль і пороговий компаратор підключений виходу першого випрямляючого модуля 11 породо першого входу блока множення, другий вхід говому значенню (еталонному сигналу) в порогоякого з'єднаний із виходом другого випрямляючого вому компараторі 12. У цьому випадку сигнал на модуля, вхід якого підключений до третього входу виході порогового компаратора 12 стає рівним нулю і, таким чином, відбувається блокування блока множення, вихід якого з'єднаний з неінвертованим другим входом першого суматора, корекпроцесу формування коректуючого сигналу. При туючому блоку надано інвертор, вхід якого підклюцьому швидкість двигуна 6 - незначна і перерегучений до виходу блока масштабуючого лювання вихідної дії системи практично відсутнє. 7 79546 8 коефіцієнта, а вихід підключений до входу другого процесу при відпрацюванні стрибка вхідної дії сисвипрямляючого модуля і третього входу блока теми, що задається, при підвищенні швидкодії сисмноження, при цьому перший вихід функціональтеми для формування моменту гальмування двиного кодуючого перетворювача з'єднаний із вхогуна. Таким чином, пристрій, що заявляється дом блока масштабуючого коефіцієнта. відповідає критерію «винахідницький рівень». Введення в коректуючий блок інвертора доСуть винаходу пояснюється кресленнями, на зволяє узгодити знак сигналу з першого виходу яких наведені: функціонального кодуючого перетворювача, на на Фіг.1 - структурна схема слідкуючої системи якому сформовано код швидкості вихідної дії сис- прототипа; теми, інвертоване значення якого при відпрацюна Фіг.2 - стр уктурна схема слідкуючої систеванні системою стрибка вхідної дії являється проми, що заявляється; порційним похідній сигнала похибки слідкуючої на Фіг.3 - часові діаграми, які ілюструють робосистеми. ту запропонованої слідкуючої системи при відпраПідключення першого виходу функціонального цюванні стрибка вхідної дії a(t). кодуючого перетворювача, на якому сформовано на Фіг.4 - часові діаграми, які ілюструють якість код швидкості вихідної дії системи, через послідороботи запропонованої слідкуючої системи при вно з'єднані блок масштабного коефіцієнту та інвідпрацюванні стрибка вхідної дії a(t) в порівнянні вертор до третього входу блока множення дозвоз слідкуючою системою-прототипом. ляє формувати на виході блока множення На блок-схемах слідкуючіх систем (Фіг.1, Фіг.2) коректуючий сигнал у вигляді знакозалежного знаі часових діаграмах (Фіг.3, Фіг.4 ) позначено: чення квадрата інвертованого кода швидкості виa(t) - вхідна дія слідкуючої системи, хідної дії системи. Таким чином, при формуванні b a(t) - ви хідна (відпрацьована) дія слідкуючої коректуючого сигналу для оптимізації перехідного системи-прототипа; процесу за умов стрибків вхідної дії, що задається, b k(t) - вихідна (відпрацьована) дія запропонопохідна від похибки системи регулювання на відваної слідкуючої системи; міну від слідкуючої системи - прототипа, форму& ba (t ) - похідна вихідної дії слідкуючої системиється без застосування беспосереднього диферепрототипа; нцювання похибки системи. Як буде показано далі, & якість коректуючого сигналу і швидкодія системи в bk (t ) - похідна вихідної дії запропонованої цьому разі підвищуються, а реалізація коректуючослідкуючої системи; го блоку спрощується. q(t) - похибка коректованої слідкуючої системи; Усі блоки і вузли слідкуючої системи виконані qн.кор.(t) - похибка некоректованої слідкуючої на основі елементної бази серійного випуску. системи; Кожна введена ознака є суттєвою і необхідUм - сигнал, сформований на виході першого ною, а сук упність нових введених ознак з відомими випрямляючого модуля (Uм =|q(t)|); ознаками прототипа та їх певний взаємозв'язок Uпор. - еталонний сигнал порогового компараміж собою створює достатню сукупність ознак затора; пропонованої слідкуючої системи, що дозволяє Uкор. - коректуючий сигнал системи (сигнал на забезпечити розв'язання поставленого завдання, виході блоку множення); тобто спростити реалізацію коректуючого блоку Usum - сумарний сигнал (сума амплітудного слідкуючої системи, забезпечити більш якісне фозначення сигналу на виході блока множення та рмування коректуючого сигналу для створення сигнала жорсткого від'ємного зворотного зв'язку з моменту гальмування двигуна, і тим самим забезпершого виходу функціонального кодуючого перепечити зменшення величини перерегулювання та творювача); тривалості перехідного процесу при відпрацюванні Id(a) - сигнал струму двигуна слідкуючої систеслідкуючою системою стрибка вхідної дії, яка зами-прототипа; дається. Id(k) - сигнал стр уму двигуна запропонованої Співставлювальний аналіз з прототипом вкаслідкуючої системи. зує на те, що пристрій, який заявляється, відрізняНа Фіг.3а представлено часові діаграми вхідється від прототипа введенням до коректуючого ної a(t) та вихідної дії b k(t), похибки коректованої блоку інвертора, вхід якого підключений до виходу q(t) та некоректованої системи qн.кор.(t), коректуюмасштабуючого коефіцієнта, а вихід - підключений чого сигнала Uкор., еталонного сигнала порогового до входу другого випрямляючого модуля і третьокомпаратора Uпор., сигнала го входу блока множення, при цьому перший вихід & функціонального кодуючого перетворювача з'єд- = Uкор + Кос × b k (t ) в градусах, де К ос - коеUs um наний із входом блока масштабуючого коефіцієнфіцієнт вводу си гнала жорсткого від'ємного зворота. Таким чином, пристрій, що заявляється, відпотного зв'язку з першого виходу функціонального відає критерію винаходу «новизна». кодуючого перетворювача. Порівняння запропонованого технічного ріНа Фіг.3б представлено часові діаграми сигнашення з іншими відомими технічними рішеннями лу напруги двигуна Ud запропонованої слідкуючої виявляє, що введення нового блоку у зазначеному системи (у вольтах). зв'язку з іншими елементами слідкуючої системи На Фіг.4а представлено часові діаграми вхіддозволяє спростити реалізацію коректуючого блоної a(t), вихідної дії слідкуючої системи-прототипа ку, забезпечити більш якісне формування корекb a(t) та ви хідної дії запропонованої слідкуючої систуючого сигналу та забезпечити зменшення велитеми b k(t). чини перерегулювання і тривалості перехідного 9 79546 10 На Фіг.4б представлена часова діаграма сигдуль сигналу похибки Uм , що формується першим налу стр уму двигуна Id( k) запропонованої слідкуювипрямляючим модулем 11, не перевищує значої системи (у амперах). чення сигналу Uпор., яке задається у пороговому На Фіг.4в представлена часова діаграма сигкомпараторі 12. Таким чином, сигнал на виході налу стр уму двигуна I d(a) слідкуючої системипорогового компаратора 12 дорівнює нулю, тобто прототипа (у амперах). значення коректуючого сигналу Uкор. на виході блоЧасові діаграми (Фіг.4) демонструють ефектику множення 13 коректуючого блока 10 також дорівність підвищення швидкодії запропонованої слідвнє нулю. Слідкуюча система працює як лінійна куючої системи при порівнянні часових діаграм система автоматичного регулювання з малою похибкою керування. вихідної дії слідкуючої системи-прототипа b a(t) і За наявності стрибкоподібної (ступінчастої) вихідної дії запропонованої слідкуючої системи зміни сигналу похибки, тобто сигналу на виході b k(t), та якість формування коректуючого сигналу вимірювача неузгодженості 1, викликаного стрибпри порівнянні часових діаграм сигналу струму ком координати вхідної дії a(t) в момент часу t=0 двигуна слідкуючої системи-прототипа Id(a) і сигналу струм у запропонованої слідкуючої системи Id(k) (наприклад, a(t) змінюється від 0град до 180град) при відпрацюванні стрибка вхідної дії. сигнал на виході першого випрямляючого модуля Функціональна схема запропонованого при11Uм починає перевищувати порогове значення строю наведена на Фіг.2. порогового компаратора 12 (еталоний сигнал Uпор., Слідкуюча система включає до свого складу який на Фіг.3 не показано). При цьому сигнал на вимірювач неузгодженості 1, перший суматор 2, виході порогового компаратора 12 стає додатнім. перший перетворювач «код-напруга» 3, другий Блок масштабуючого коефіцієнта 15, разом з інсуматор 4, підсилювач 5, двигун 6, датчик кута 7, вертором 16, другим випрямляючим модулем 14 і функціональний кодуючий перетворювач 8, другий блоком множення 13 формують на виході останьоперетворювач «код-напруга» 9 і коректуючий блок го коректуючий сигнал Uкор. у вигляді знакозалеж10, який включає перший випрямляючий модуль ного значення квадрата інвертованого кода швид11, пороговий компаратор 12, блок множення 13, & & кості вихідної дії системи bk (t ) × b k (t ) , який другий випрямляючий модуль 14, блок масштабуючого коефіцієнта 15 та інвертор 16. складається з сигналом похибки q(t) в першому суматорі 2. Внутрішній контур слідкуючої системи Неінвертуючий вхід вимірювача неузгодженопочинає відпрацьовувати такий сумарний сигнал, сті 1 з'єднаний з цифровим задавачем кода вхідної здійснюючи розгін двигуна 6 до максимальної дії (на Фіг.2 не наведений). Вихід вимірювача нешвидкості (див. Фіг.3а, момент часу від t=0 до t1). узгодженості 1 підключений через послідовно з'єднані перший випрямляючий модуль 11 і пороговий Амплітудне значення сигналу на виході блока множення 13Uкор. у цей проміжок часу менше у компаратор 12 до першого входу блока множення порівнянні із амплітудним значенням сигналу по13, а також підключений до неінвертуючого першого входу першого суматора 2, ви хід якого через хибки q(t) на виході вимірювача неузгодженості 1, послідовно з'єднані перший перетворювач "кодтому сигнал на виході першого суматора 2, який напруга" 3, другий суматор 4, підсилювач 5, двигун подається на вхід першого перетворювача «код6 та датчик кута 7, механічно зв'язаний з валом напруга» 3, додатного знаку. Сигнал на виході друдвигуна 6, з'єднаний з входом функціонального гого суматора 4, який здійснює формування алгекодуючого перетворювача 8. Перший вихід функбраїчної суми сигналів з виходів першого та другоціонального кодуючого перетворювача 8 (на якому го перетворювачів «код напруга» (блоки 3, 9, сформовано код швидкості вихідної дії системи відповідно), за рахунок вибору рівня жорсткого від'ємного зворотного зв'язку по швидкості двигуна & (t ) ) з'єднаний через другий перетворювач "кодbk 6 (рівня сигнала з виходу другого перетворювача напруга" 9 з інвертуючим другим входом другого "код-напруга" 9) також додатного знаку. суматора 4, а також через послідовно з'єднані За умов, коли амплітудне значення сигналу на блок масштабуючого коефіцієнта 15, інвертор 16 і виході блока множення 13 Uкор. разом з сигналом другий випрямляючий модуль 14 з'єднаний з дру& жорсткого від'ємного зворотного зв'язку bk (t ) могим входом блока множення 13, третій вхід якого підключений до виходу інвертора 16. Вихід блока ментами часу перевищує амплітудне значення множення 13 з'єднаний з неінвертуючим другим сигналу q(t) на виході вимірювача неузгодженості 1 входом першого суматора 2. Другий вихід функці(на часовому інтервалі t>t1 див. Фіг.3а), тобто онального кодуючого перетворювача 8 (на якому & Uкор. + К ос × bk (t ) > q(t ) , сигнал на ви ході другого & сформовано код кута вихідної дії системи bk (t ) ) суматора 4 (і підсилювача 5) змінює знак на проз'єднаний з інвертуючим входом вимірювача нетилежний, за рахунок чого починається миттєве узгодженості 1. гальмування двигуна 6. Усі елементи коректуючого блоку 10, а також При здійсненні гальмування двигуна 6 відбувимірювач неузгодженості 1 можуть бути виконані вається зменшення швидкості двигуна 6, тобто на основі серійно вироблених великих інтегральзменшення рівня сигналу на першому виході фунних схем, наприклад, ПЛІС серії «Altera». & кціонального кодуючого перетворювача 8 bk (t ) (і Слідкуюча система, що заявляється, працює другого перетворювача «код-напруга» 9). І в мотаким чином. менти часу, коли амплітудне значення сигналу на При відпрацюванні керуючих сигналів повільвиході блока множення 13 Uкop. разом з сигналом ної зміни a(t) в усталеному режимі величина похи& жорсткого від'ємного зворотного зв'язку bk (t ) не бки слідкуючої системи q(t) близька до нуля, мо ( ) 11 79546 12 Uкор. не з'являвся на виході коректуючого блоку 10. перевищує амплітудне значення сигналу q(t) на Таким чином, у запропонованій слідкуючій сивиході вимірювача неузгодженості 1, тобто & стемі довжина часу дії перехідного процесу, виUкор. + К ос × b k (t ) 0, тa кликаного стрибкоподібною зміною координати & & & входної дії a(t), мінімізується на кінцевій ділянці bk (t ) × bk (t ) + К ос × b k (t ) > q(t ) при a(t) q(t ) & & при a(t)>0, та bk Як результат створення режиму рівноприскоk ос k реного гальмування двигуна 6 відбувається змен& & & bk (t ) × b k (t ) + Кос × bk (t ) < q (t ) при a(t)
Додаткова інформація
Автори англійськоюKorsun Valentyn Petrovych, Kralin Volodymyr Vsevolodovych, Motuz Heorhii Ivanovych, Steba Oleksandr Mykhailovych, Stefanovych Viktor Tarasovych
Автори російськоюКорсун Валентин Петрович, Кралин Владимир Всеволодович, Мотуз Георгий Иванович, Стеба Александр Михайлович, Стефанович Виктор Тарасович
МПК / Мітки
МПК: G05B 11/01, G05B 11/00
Код посилання
<a href="https://ua.patents.su/7-79546-slidkuyucha-sistema.html" target="_blank" rel="follow" title="База патентів України">Слідкуюча система</a>
Слідкуюча система
Номер патенту: 63756
Опубліковано: 15.08.2005
Автори: Мотуз Георгій Іванович, Орляк Микола Васильович, Стефанович Віктор Тарасович, Стеба Олександр Михайлович, Кралін Володимир Всеволодович, Старков Юрій Володимирович, Корсун Валентин Петрович
МПК: G05B 11/01, G05B 11/00
Формула / Реферат:
Лінійний хвильовий п'єзоелектричний двигун, що містить дві притиснуті одна до одної однією або двома плоскими фрикційними поверхнями дві частини з можливістю їх взаємного зміщення, одна з яких є п'єзоелемент у формі бруска з трьома парами електродів на плоских протилежних поверхнях, крайні з яких перехресно з'єднані між собою, між якими розміщена третя пара електродів, який відрізняється тим, що брусок виконаний з одного матеріалу постійного...
Слідкуюча система
Номер патенту: 78405
Опубліковано: 15.03.2007
Автори: Мотуз Георгій Іванович, Корсун Валентин Петрович, Стеба Олександр Михайлович, Стефанович Віктор Тарасович, Кралін Володимир Всеволодович
МПК: G05B 11/00, G05B 11/01
Формула / Реферат:
Слідкуюча система, яка включає вимірювач неузгодженості, перший суматор, перший і другий перетворювачі "код-напруга", підсилювач, двигун, датчик кута, функціональний кодуючий перетворювач і коректуючий блок, до складу якого входять другий суматор, випрямний модуль і пороговий компаратор, при цьому вихід першого перетворювача "код-напруга" з'єднаний з неінвертуючим першим входом першого суматора, вихід якого через...
Слідкуюча система
Номер патенту: 62671
Опубліковано: 15.12.2003
Автори: Клименко Віталій Валерійович, Соколов Юрий Миколайович, Мухлаєв Сергій Вікторович, Субота Анатолій Максимович
МПК: G06F 11/07, G05B 19/02, F15B 9/00, G05B 11/01
Формула / Реферат:
Слідкуюча система, що містить датчик положення вхідного вала, датчик положення вихідного вала, вимірювач неузгодження, підсилювач, привід навантаження, яка відрізняється тим, що додатково містить мікроконтролер, який через узгоджуючий інтерфейс з'єднаний з входом крокового двигуна, вихідний вал якого через редуктор і кінематичний зв'язок з'єднаний з ротором датчика положення вхідного вала, вихід якого через перший підсилювач з'єднаний з одним...
Оптична зі зворотним зв’язком слідкуюча система з позиціювання об’єкта
Номер патенту: 75216
Опубліковано: 15.03.2006
Автори: Мухаммад Рашик Улла Бейг Мирза, Парняков Євген Серафимович
МПК: G05B 11/00
Мітки: слідкуюча, система, позиціювання, зворотним, оптична, зв'язком, об'єкта
Формула / Реферат:
Оптична зі зворотним зв'язком слідкуюча система з позиціювання об'єкта, яка включає послідовно з'єднану нелінійну з зоною нечутливості ланку – позиційований об’єкт з відбиваючим елементом, наприклад дзеркалом, який встановлено на об’єкті позиціювання, вимірювач неузгодженості, підсилювач, блок формування сигналу керування і виконавчий привід, яка відрізняється тим, що в ній паралельно з вимірювачем неузгодженості приєднаний блок формування...
Гідроважільна слідкуюча система з диференційним редуктором
Номер патенту: 23624
Опубліковано: 11.06.2007
Автори: Корчак Олена Сергіївна, Шинкаренко Олег Михайлович, Левандовський Володимир Феліксович
МПК: B30B 15/16
Мітки: система, слідкуюча, гідроважільна, диференційним, редуктором
Формула / Реферат:
Гідроважільна слідкуюча система з диференційним редуктором, що містить пульт з рукояткою керування, виконавчий механізм, маслостанцію, гідроважільний сервопривід, що включає двоклапанний розподільник з системою підсилення і сервомотор, важелі, тяги, коромисло, підсумовуючий елемент, розподільний вал преса, яка відрізняється тим, що підсилюючим елементом є слідкуючий здвоєний гідропідсилювач, а підсумовуючим - зв’язаний з ним через коромисло...
Попередній патент: Кишеньковий штемпельний пристрій
Наступний патент: Механізм, зокрема механізм стулки, для вікон або подібного пристрою
Випадковий патент: Спосіб обробки вибухом зварних металоконструкцій