Механізм прямолінійного переміщення
Номер патенту: 40119
Опубліковано: 25.03.2009
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
Формула / Реферат
Механізм прямолінійного переміщення, який складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, який відрізняється тим, що з кривошипом, закріпленим на ведучому валу, з'єднано шарнірно другий важіль, довжина якого рівна довжині кривошипа та рівна одній четвертій частині потрібної довжини прямолінійного переміщення точки, з корпусом механізму співвісно з ведучим валом нерухомо закріплена зірочка, яка зачіпляється з ланцюгом, який в свою чергу зачіпляється з другою зіркою, нерухомо закріпленою з другим важелем та співвісно з шарнірним з'єднанням важеля та кривошипа, передаточне відношення від нерухомої зірочки до рухомої, яка закріплена на важелі, дорівнює двом.
Текст
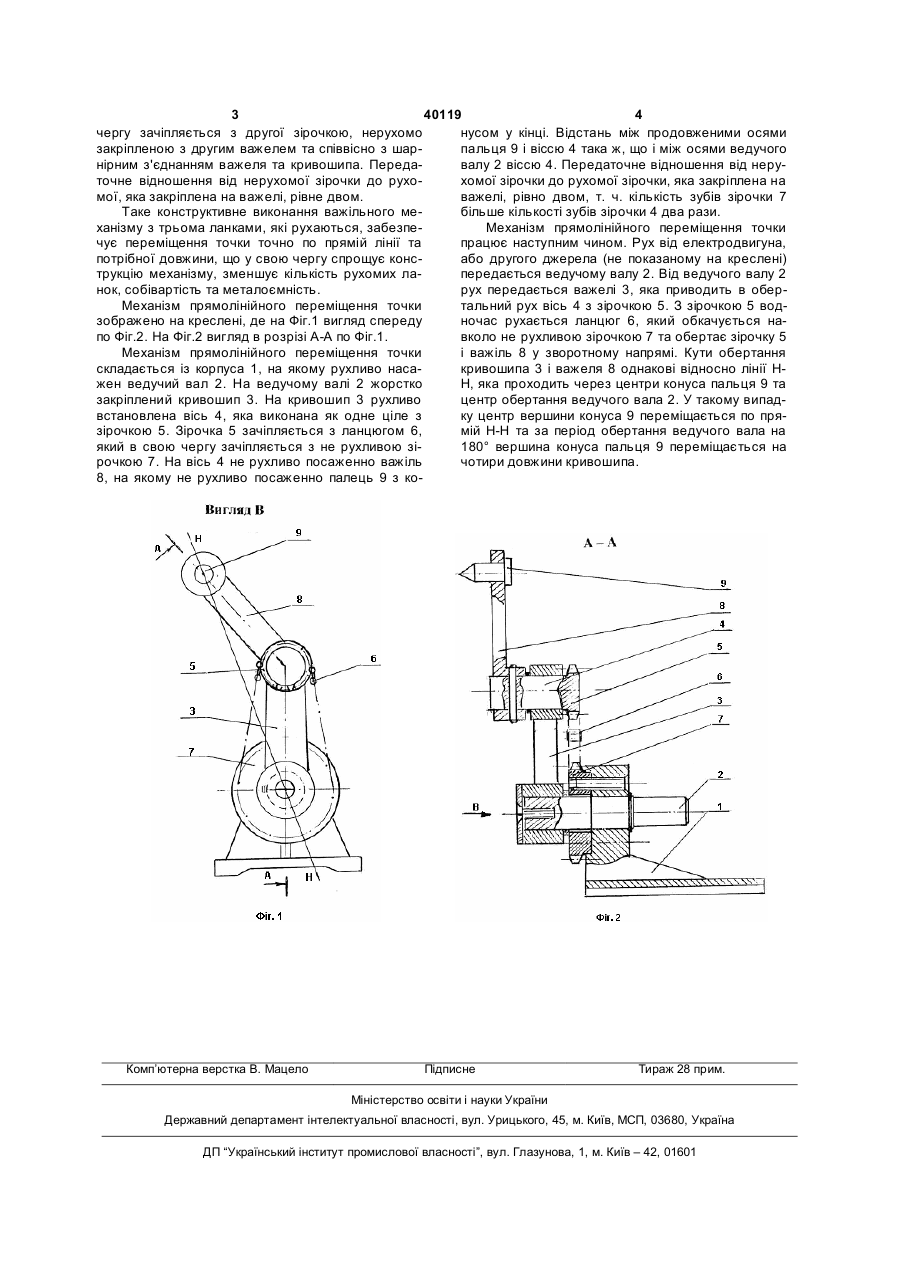
УКРАЇНА (19) UA (11) 40119 (13) U (51) МПК (2009) F16H 21/00 МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС видається під відповідальність власника патенту ДО ПАТЕНТУ НА КОРИСНУ МОДЕЛЬ (54) МЕХАНІЗМ ПРЯМОЛІНІЙНОГО ПЕРЕМІЩЕННЯ 1 2 (13) 40119 (11) Прототип і корисна модель, що заявляється мають такі спільні ознаки: *корпус, *кривошип, *важелі, *шарнірні з'єднання, *ведучий вал. Конструкція описаного механізму має ряд недоліків: 1. Велика кількість ланок, що вимагає високу точність виготовлення ланок, точність зборки та монтажу. 2. Не висока точність прямолінійного переміщення точки із-за великої кількості ланок. 3. Не великий хід точки, яка переміщається по прямій лінії. В основу корисної моделі поставлено задачу: розробити конструкцію механізму для точного прямолінійного переміщення точки на потрібну довжину, зменшити кількість рухомих ланок, собівартість та металоємність. Поставлена задача вирішена в конструкції механізму Посельє - Ліпкіна, яка складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, тим, що з кривошипом, закріпленим на ведучому валу, з'єднано шарнірно другий важіль, довжина якого рівна довжині кривошипа та рівна одній четвертій частині потрібної довжини прямолінійного переміщення точки. З корпусом механізму співвісно з ведучим валом нерухомо закріплена зірочка, яка зачіпляється з ланцюгом, який в свою UA Корисна модель відноситься до галузі машинобудування, а саме до механізмів, які утворюють прямолінійні переміщення і може бути використана у приборних пристроях, робочих машинах, де треба прямолінійне переміщення робочого органу, у маніпуляторів та промислових роботах для прямолінійного переміщення схвату. Відомі конструкції механізмів для перетворення обертального руху у прямолінійний рух точки [див., наприклад, с.79, рис.2.68. Механизмы. Справочное пособие. Изд. 4-е, доработанное и дополненное. Под ред. чл. - кор АН СССР С.Н. Кожевникова. М.: Машиностроение, 1976]. Головним недоліком механізму є наявність поступальної кінематичної пари, що важко обробити, втрати на тертя збільшуються, крім того вона забезпечує не великий хід точки, яка рухається прямолінійно. Відома конструкція другого механізму [див. там же с.536, рис.9.3], у якому точка переміщається по прямій лінії. Головним недоліком механізму є велика кількість ланок, що приводить до великих похибок переміщення від прямої лінії, крім того довжина ходу точки не велика. Найбільш близьким до заявленого є технічне рішення [див.267, рис.355, Синтез плоских механизмов. И. И. Артоболевский, Н. И. Левитский, С. А. Черккудинов. Изд. Физ - мат лит. М.: 1959]. Механізм під назвою "Механізм Посель - Ліпкіна" дозволяє при обертальному русі ведучого кривошипа переміщати точку по прямій лінії точно. U з'єднано шарнірно другий важіль, довжина якого рівна довжині кривошипа та рівна одній четвертій частині потрібної довжини прямолінійного переміщення точки, з корпусом механізму співвісно з ведучим валом нерухомо закріплена зірочка, яка зачіпляється з ланцюгом, який в свою чергу зачіпляється з другою зіркою, нерухомо закріпленою з другим важелем та співвісно з шарнірним з'єднанням важеля та кривошипа, передаточне відношення від нерухомої зірочки до рухомої, яка закріплена на важелі, дорівнює двом. (19) (21) u200812575 (22) 27.10.2008 (24) 25.03.2009 (46) 25.03.2009, Бюл.№ 6, 2009 р. (72) АМБАРЦУМЯНЦ РОБЕРТ ВАЧАГАНОВИЧ, UA, АМБАРЦУМЯНЦ КАРЕН РОБЕРТОВИЧ, UA (73) АМБАРЦУМЯНЦ РОБЕРТ ВАЧАГАНОВИЧ, UA, АМБАРЦУМЯНЦ КАРЕН РОБЕРТОВИЧ, UA (57) Механізм прямолінійного переміщення, який складається з корпусу, ведучого вала, кривошипа, шести рухомих важелів, який відрізняється тим, що з кривошипом, закріпленим на ведучому валу, 3 40119 4 нусом у кінці. Відстань між продовженими осями чергу зачіпляється з другої зірочкою, нерухомо пальця 9 і віссю 4 така ж, що і між осями ведучого закріпленою з другим важелем та співвісно з шарвалу 2 віссю 4. Передаточне відношення від нерунірним з'єднанням важеля та кривошипа. Передахомої зірочки до рухомої зірочки, яка закріплена на точне відношення від нерухомої зірочки до руховажелі, рівно двом, т. ч. кількість зубів зірочки 7 мої, яка закріплена на важелі, рівне двом. більше кількості зубів зірочки 4 два рази. Таке конструктивне виконання важільного меМеханізм прямолінійного переміщення точки ханізму з трьома ланками, які рухаються, забезпепрацює наступним чином. Рух від електродвигуна, чує переміщення точки точно по прямій лінії та або другого джерела (не показаному на креслені) потрібної довжини, що у свою чергу спрощує конспередається ведучому валу 2. Від ведучого валу 2 трукцію механізму, зменшує кількість рухомих ларух передається важелі 3, яка приводить в обернок, собівартість та металоємність. тальний рух вісь 4 з зірочкою 5. З зірочкою 5 водМеханізм прямолінійного переміщення точки ночас рухається ланцюг 6, який обкачується назображено на креслені, де на Фіг.1 вигляд спереду вколо не рухливою зірочкою 7 та обертає зірочку 5 по Фіг.2. На Фіг.2 вигляд в розрізі А-А по Фіг.1. і важіль 8 у зворотному напрямі. Кути обертання Механізм прямолінійного переміщення точки кривошипа 3 і важеля 8 однакові відносно лінії Нскладається із корпуса 1, на якому рухливо насаН, яка проходить через центри конуса пальця 9 та жен ведучий вал 2. На ведучому валі 2 жорстко центр обертання ведучого вала 2. У такому випадзакріплений кривошип 3. На кривошип 3 рухливо ку центр вершини конуса 9 переміщається по прявстановлена вісь 4, яка виконана як одне ціле з мій Н-Н та за період обертання ведучого вала на зірочкою 5. Зірочка 5 зачіпляється з ланцюгом 6, 180° вершина конуса пальця 9 переміщається на який в свою чергу зачіпляється з не рухливою зічотири довжини кривошипа. рочкою 7. На вісь 4 не рухливо посаженно важіль 8, на якому не рухливо посаженно палець 9 з ко Комп’ютерна верстка В. Мацело Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanism of linear motion
Автори англійськоюAmbartsumiants Robert Vachahanovych, Ambartsumiants Karen Robertovych
Назва патенту російськоюМеханизм прямолинейного перемещения
Автори російськоюАмбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК / Мітки
МПК: F16H 21/00
Мітки: механізм, прямолінійного, переміщення
Код посилання
<a href="https://ua.patents.su/2-40119-mekhanizm-pryamolinijjnogo-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Механізм прямолінійного переміщення</a>
Гвинтовий конвеєр прямолінійного переміщення заготовок
Номер патенту: 11979
Опубліковано: 16.01.2006
Автори: Левенець Володимир Богданович, Гевко Іван Богданович, Гевко Ігор Богданович
МПК: B65G 33/16
Мітки: прямолінійного, гвинтовий, переміщення, конвеєр, заготовок
Формула / Реферат:
Гвинтовий конвеєр прямолінійного переміщення заготовок, що містить раму, кожух, гвинтовий робочий орган з центральним валом, привід, механізми підтримки, завантаження, вивантаження, який відрізняється тим, що гвинтовий робочий орган виконано у вигляді двох або більше гвинтових дротяних елементів з мінімальним і максимальним радіусом, які рівномірно по довжині і жорстко з'єднані з радіальними перемичками з різним поперечним перерізом, якими...
Зубчасто-важільний механізм поступального переміщення об’єкта

Номер патенту: 38996
Опубліковано: 26.01.2009
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/00
Мітки: зубчасто-важільний, об'єкта, поступального, механізм, переміщення
Формула / Реферат:
Зубчасто-важільний механізм поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, шатуни, об'єкт, що утворює шарнірні з'єднання із шатунами, який відрізняється тим, що об'єкт одним кінцем шарнірно з'єднаний із шатуном кривошипно-коромислового механізму, а іншим кінцем шарнірно з'єднаний з іншим шатуном, що утворює шарнірне з'єднання з важелем, жорстко закріпленим з зубчастим колесом, встановленим на вал шарнірного...
Регульований механізм поступального переміщення
Номер патенту: 32190
Опубліковано: 12.05.2008
Автори: Олісеєнко Юрій Володимирович, Амбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович
МПК: F16H 29/00
Мітки: механізм, поступального, регульованій, переміщення
Формула / Реферат:
Регульований механізм поступального руху, що містить нерухоме центральне колесо, сателіт, вал з водилом, шток та повзун, який відрізняється тим, що центральне колесо виконане у вигляді черв'ячного колеса, яке встановлене у корпусі механізму з можливістю руху, також конструкція додатково містить зчеплений з черв'ячним колесом самогальмуючий черв'як, який одним кінцем встановлений з можливістю руху в корпусі, а іншим кінцем у кронштейні,...
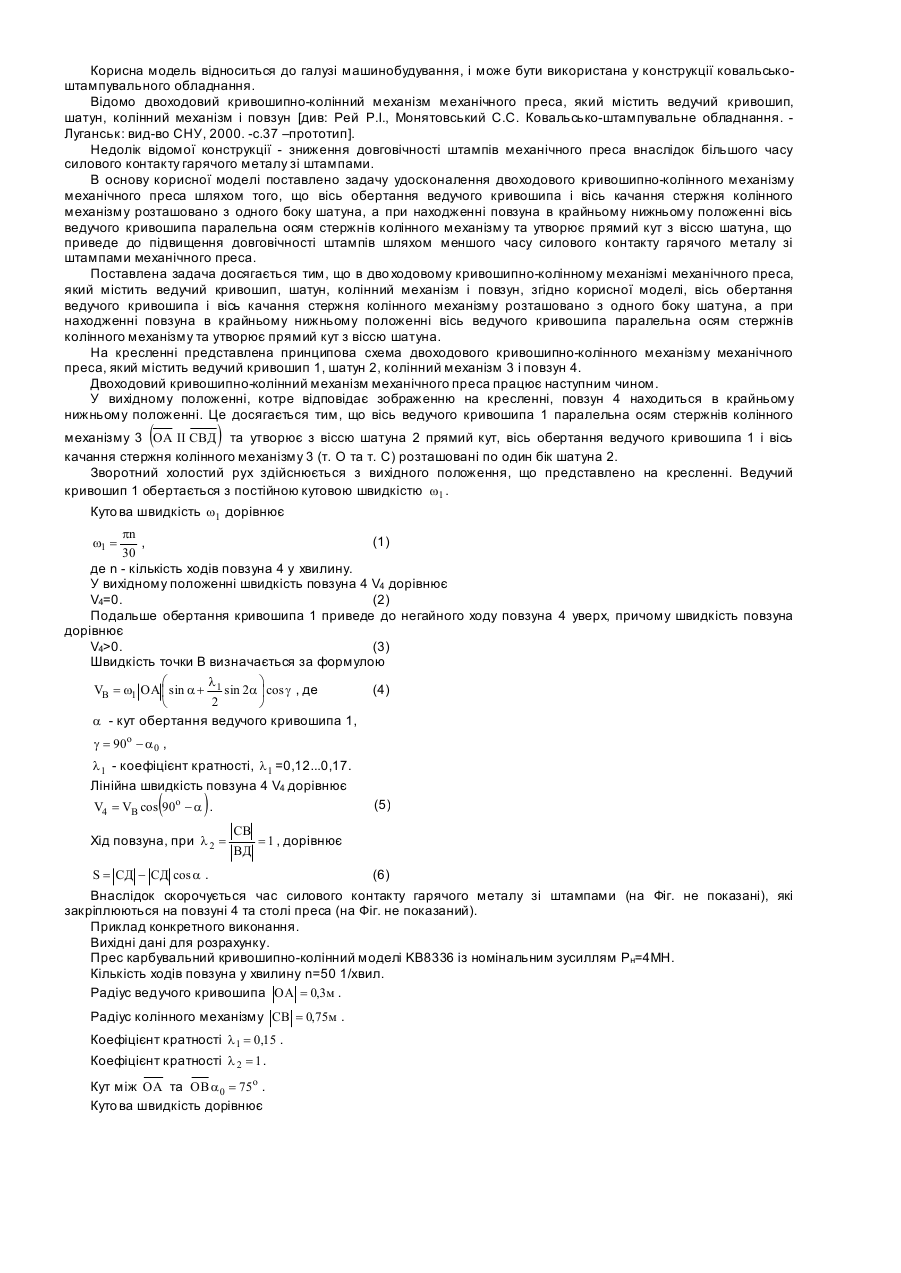
Двоходовий кривошипно-колінний механізм механічного преса
Номер патенту: 23725
Опубліковано: 11.06.2007
Автори: Гутько Юрій Іванович, Рей Мирослава Романівна
МПК: B21J 7/00
Мітки: кривошипно-колінний, механізм, двоходовий, преса, механічного
Формула / Реферат:
Двоходовий кривошипно-колінний механізм механічного преса, що містить ведучий кривошип, шатун, колінний механізм і повзун, який відрізняється тим, що вісь обертання ведучого кривошипа і вісь качання стержня колінного механізму розташовані по один бік шатуна, а при надходженні повзуна в крайньому нижньому положенні вісь ведучого кривошипа паралельна осям стержнів колінного механізму та утворює прямий кут з віссю шатуна.
Механізм синхронного горизонтального переміщення вантажонесучих кареток кліті в багатоярусній механізованій автостоянці
Номер патенту: 16850
Опубліковано: 15.08.2006
Автор: Васюков Олег Дмитрович
МПК: E04H 6/18
Мітки: механізований, багатоярусний, кареток, кліті, автостоянці, горизонтального, вантажонесучих, синхронного, переміщення, механізм
Формула / Реферат:
1. Механізм синхронного горизонтального переміщення вантажонесучих кареток кліті в багатоярусній механізованій автостоянці, що містить дві ланцюгові передачі, кожна з яких має вантажонесучий ланцюг, обвідну ведучу зірочку та пасивні кінцеві зірочки, вал синхронізації, який з'єднує обвідні ведучі зірочки, електропривід, з'єднаний з валом синхронізації, та вузол з'єднання вантажонесучої каретки з вантажонесучим ланцюгом, який відрізняється тим,...
Попередній патент: Двочастотний спосіб вимірювання швидкості звуку в матеріалах
Наступний патент: Спосіб мануальної діагностики і мануальної терапії доктора березовського
Випадковий патент: Пристрій по приготуванню зразків для рентгенофлуоресцентного аналізу