Робоче обладнання захватного типу
Номер патенту: 40673
Опубліковано: 27.04.2009
Автори: Краснопьоров Михайло Сергійович, Мелашич Василь Васильович, Гончарук Роман Миколаєвич
Формула / Реферат
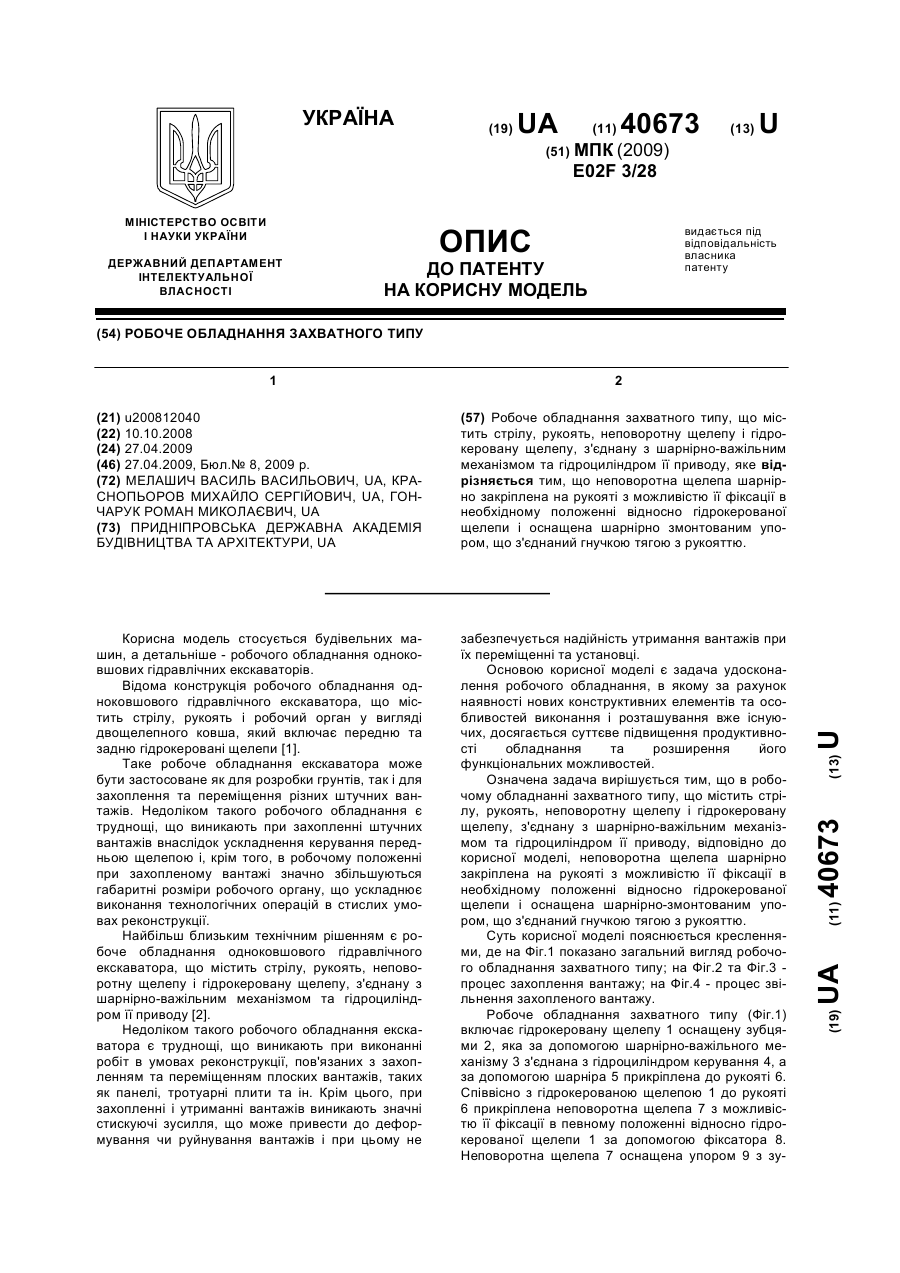
Робоче обладнання захватного типу, що містить стрілу, рукоять, неповоротну щелепу і гідрокеровану щелепу, з'єднану з шарнірно-важільним механізмом та гідроциліндром її приводу, яке відрізняється тим, що неповоротна щелепа шарнірно закріплена на рукояті з можливістю її фіксації в необхідному положенні відносно гідрокерованої щелепи і оснащена шарнірно змонтованим упором, що з'єднаний гнучкою тягою з рукояттю.
Текст
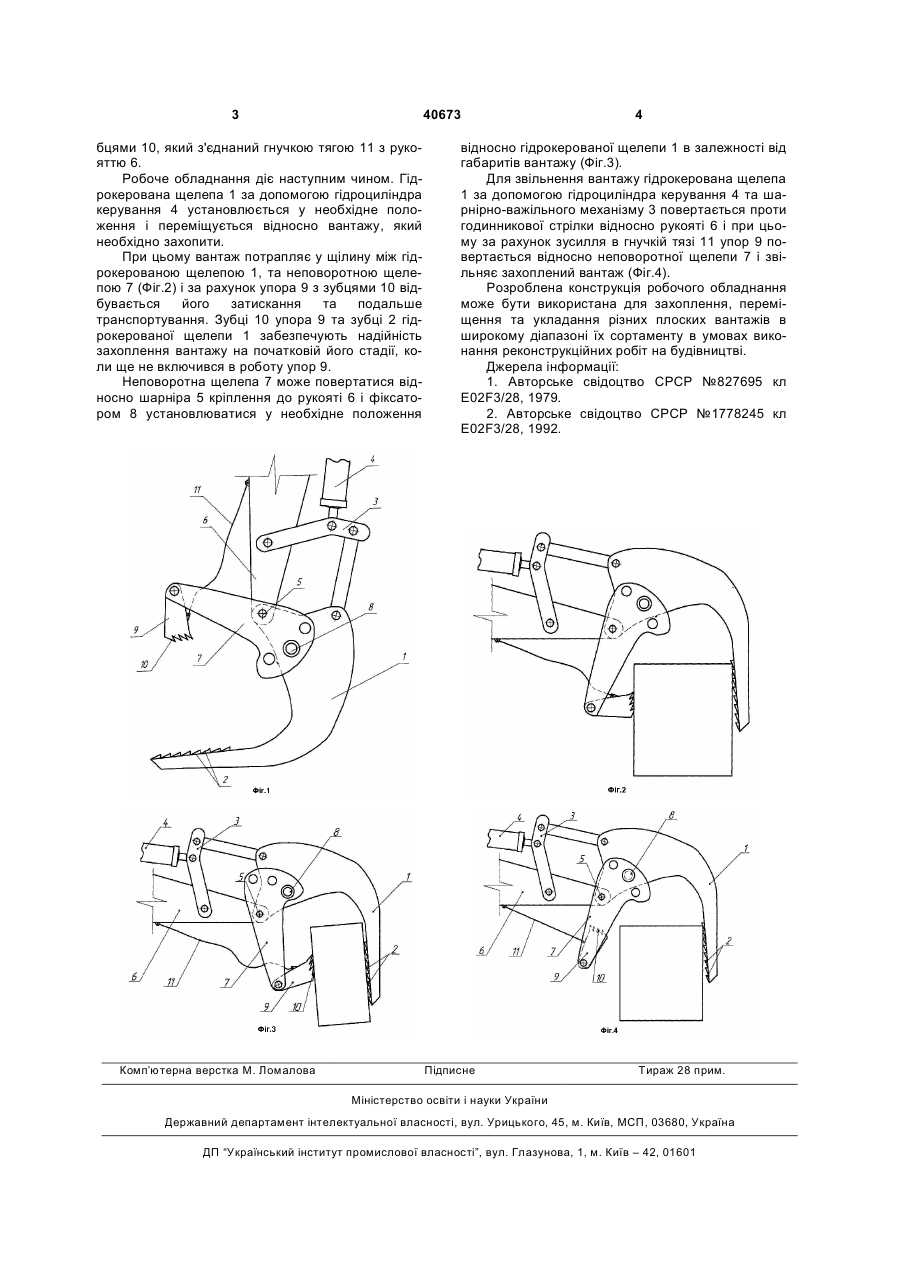
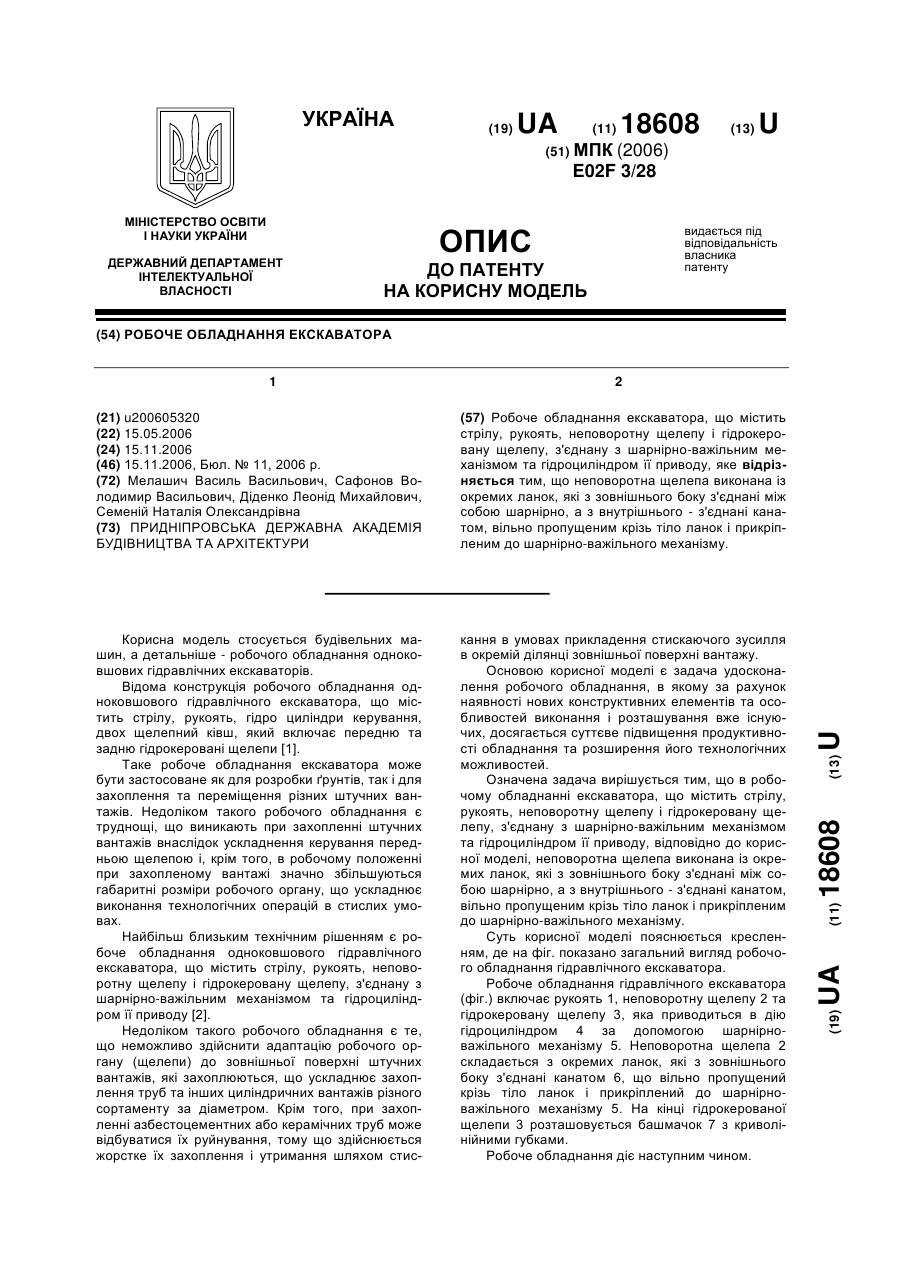
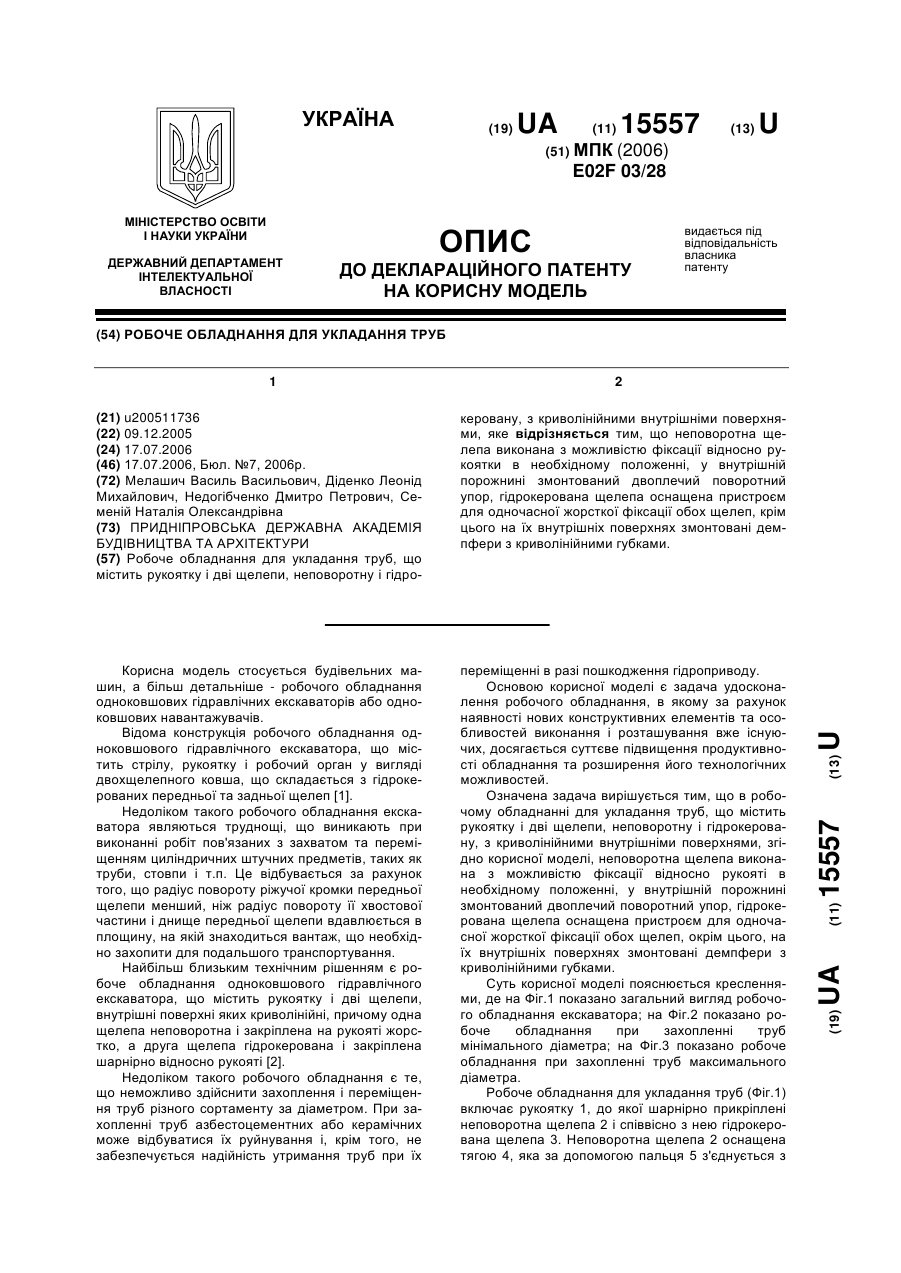
Робоче обладнання захватного типу, що містить стрілу, рукоять, неповоротну щелепу і гідрокеровану щелепу, з'єднану з шарнірно-важільним механізмом та гідроциліндром її приводу, яке відрізняється тим, що неповоротна щелепа шарнірно закріплена на рукояті з можливістю її фіксації в необхідному положенні відносно гідрокерованої щелепи і оснащена шарнірно змонтованим упором, що з'єднаний гнучкою тягою з рукояттю. (19) (21) u200812040 (22) 10.10.2008 (24) 27.04.2009 (46) 27.04.2009, Бюл.№ 8, 2009 р. (72) МЕЛАШИЧ ВАСИЛЬ ВАСИЛЬОВИЧ, UA, КРАСНОПЬОРОВ МИХАЙЛО СЕРГІЙОВИЧ, UA, ГОНЧАРУК РОМАН МИКОЛАЄВИЧ, UA (73) ПРИДНІПРОВСЬКА ДЕРЖАВНА АКАДЕМІЯ БУДІВНИЦТВА ТА АРХІТЕКТУРИ, UA 3 40673 бцями 10, який з'єднаний гнучкою тягою 11 з рукояттю 6. Робоче обладнання діє наступним чином. Гідрокерована щелепа 1 за допомогою гідроциліндра керування 4 установлюється у необхідне положення і переміщується відносно вантажу, який необхідно захопити. При цьому вантаж потрапляє у щілину між гідрокерованою щелепою 1, та неповоротною щелепою 7 (Фіг.2) і за рахунок упора 9 з зубцями 10 відбувається його затискання та подальше транспортування. Зубці 10 упора 9 та зубці 2 гідрокерованої щелепи 1 забезпечують надійність захоплення вантажу на початковій його стадії, коли ще не включився в роботу упор 9. Неповоротна щелепа 7 може повертатися відносно шарніра 5 кріплення до рукояті 6 і фіксатором 8 установлюватися у необхідне положення Комп’ютерна верстка М. Ломалова 4 відносно гідрокерованої щелепи 1 в залежності від габаритів вантажу (Фіг.3). Для звільнення вантажу гідрокерована щелепа 1 за допомогою гідроциліндра керування 4 та шарнірно-важільного механізму 3 повертається проти годинникової стрілки відносно рукояті 6 і при цьому за рахунок зусилля в гнучкій тязі 11 упор 9 повертається відносно неповоротної щелепи 7 і звільняє захоплений вантаж (Фіг.4). Розроблена конструкція робочого обладнання може бути використана для захоплення, переміщення та укладання різних плоских вантажів в широкому діапазоні їх сортаменту в умовах виконання реконструкційних робіт на будівництві. Джерела інформації: 1. Авторське свідоцтво СРСР №827695 кл E02F3/28, 1979. 2. Авторське свідоцтво СРСР №1778245 кл E02F3/28, 1992. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюExecutive equipment of holder type
Автори англійськоюMelashych Vasyl Vasyliovych, Krasnopiorov Mykhailo Serhiiovych, Honcharuk Roman Mykolaievych
Назва патенту російськоюРабочее оборудование захватного типа
Автори російськоюМелашич Василий Васильевич, Красноперов Михаил Сергеевич, Гончарук Роман Николаевич
МПК / Мітки
МПК: E02F 3/28
Мітки: робоче, обладнання, захватного, типу
Код посилання
<a href="https://ua.patents.su/2-40673-roboche-obladnannya-zakhvatnogo-tipu.html" target="_blank" rel="follow" title="База патентів України">Робоче обладнання захватного типу</a>
Захватно-кліщове робоче обладнання екскаватора

Номер патенту: 18605
Опубліковано: 15.11.2006
Автори: Рибалка Катерина Анатоліївна, Мелашич Василь Васильович, Сафонов Володимир Васильович, Качур Світлана Михайлівна, Семеній Наталія Олександрівна
МПК: E02F 3/28
Мітки: обладнання, робоче, захватно-кліщове, екскаватора
Формула / Реферат:
Захватно-кліщове робоче обладнання екскаватора, що містить стрілу, рукоять, неповоротну та гідрокеровану щелепу з шарніром кріплення, яке відрізняється тим, що неповоротна щелепа складена з верхньої та нижньої шарнірно з'єднаних між собою частин з можливістю їх фіксації в необхідному положенні відносно одна одної та оснащених з внутрішнього боку демпферами з губками, а гідрокерована щелепа виконана з можливістю переміщення та фіксації її...
Робоче обладнання екскаватора
Номер патенту: 18608
Опубліковано: 15.11.2006
Автори: Діденко Леонід Михайлович, Мелашич Василь Васильович, Семеній Наталія Олександрівна, Сафонов Володимир Васильович
МПК: E02F 3/28
Мітки: робоче, обладнання, екскаватора
Формула / Реферат:
Робоче обладнання екскаватора, що містить стрілу, рукоять, неповоротну щелепу і гідрокеровану щелепу, з'єднану з шарнірно-важільним механізмом та гідроциліндром її приводу, яке відрізняється тим, що неповоротна щелепа виконана із окремих ланок, які з зовнішнього боку з'єднані між собою шарнірно, а з внутрішнього - з'єднані канатом, вільно пропущеним крізь тіло ланок і прикріпленим до шарнірно-важільного механізму.
Робоче обладнання для укладання труб
Номер патенту: 15557
Опубліковано: 17.07.2006
Автори: Недогібченко Дмитро Петрович, Мелашич Василь Васильович, Семеній Наталія Олександрівна, Діденко Леонід Михайлович
МПК: E02F 03/28
Мітки: робоче, укладання, обладнання, труб
Формула / Реферат:
Робоче обладнання для укладання труб, що містить рукоятку і дві щелепи, неповоротну і гідрокеровану, з криволінійними внутрішніми поверхнями, яке відрізняється тим, що неповоротна щелепа виконана з можливістю фіксації відносно рукоятки в необхідному положенні, у внутрішній порожнині змонтований двоплечий поворотний упор, гідрокерована щелепа оснащена пристроєм для одночасної жорсткої фіксації обох щелеп, крім цього на їх внутрішніх поверхнях...
Робоче обладнання екскаватора
Номер патенту: 65751
Опубліковано: 15.04.2004
Автори: Шикаловський Дмитро Григорович, Мелашич Василь Васильович
МПК: E02F 3/28
Мітки: робоче, екскаватора, обладнання
Формула / Реферат:
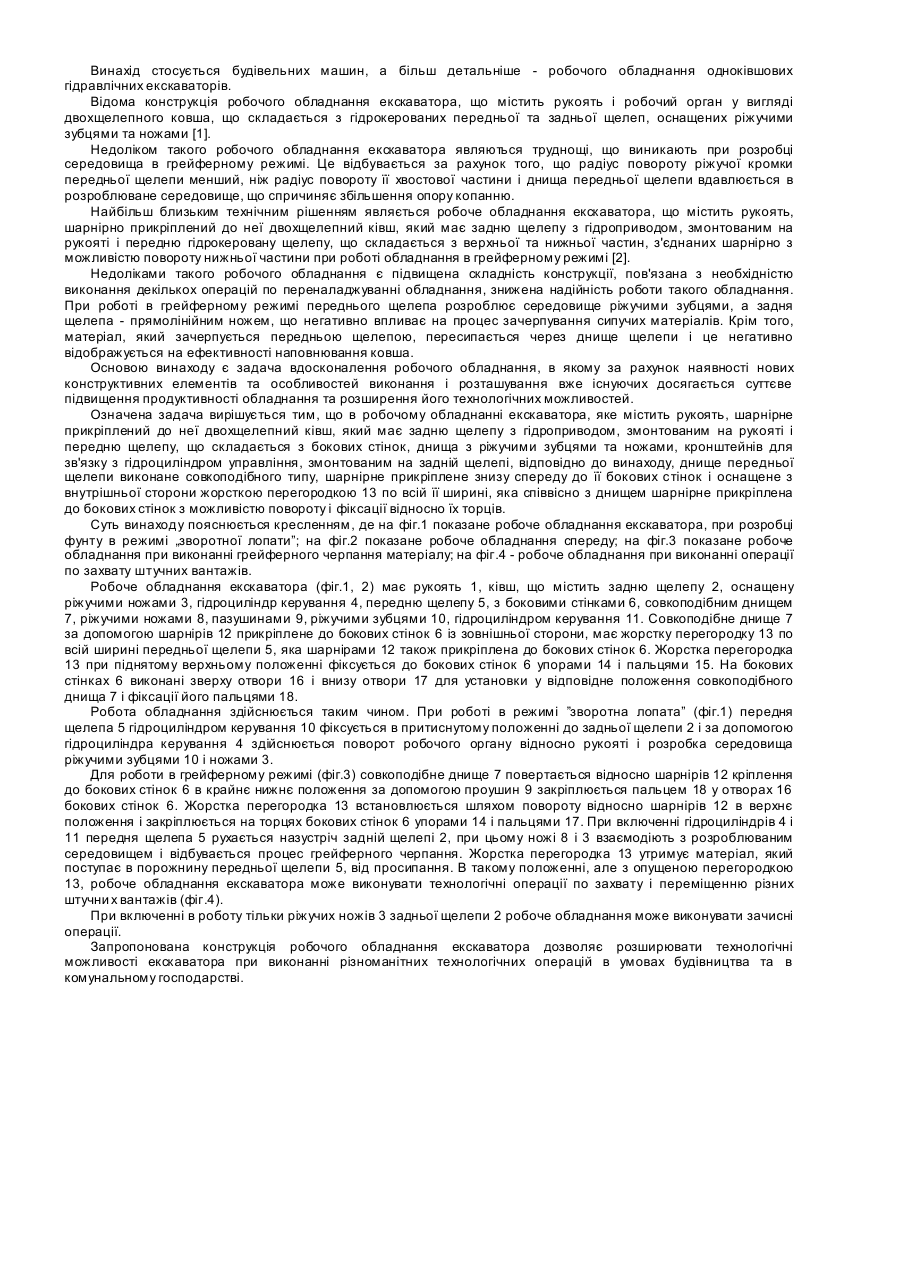
Робоче обладнання екскаватора, що містить рукоять, шарнірно прикріплений до неї двощелепний ківш, який має задню щелепу з гідроприводом, змонтованим на рукояті, і передню щелепу, що складається з бокових стінок, днища з різальними зубцями та ножами, гідроциліндр управління, змонтований на задній щелепі, яке відрізняється тим, що днище передньої щелепи виконане совкоподібного типу, шарнірно прикріплене знизу спереду до її бокових стінок і...
Робоче обладнання для реконструкції трубопроводів
Номер патенту: 40672
Опубліковано: 27.04.2009
Автори: Мелашич Василь Васильович, Діденко Леонід Михайлович, Сафонов Володимир Васильович, Рибалка Катерина Анатоліївна, Мелашич Сергій Васильович
МПК: E02F 3/28
Мітки: трубопроводів, робоче, реконструкції, обладнання
Формула / Реферат:
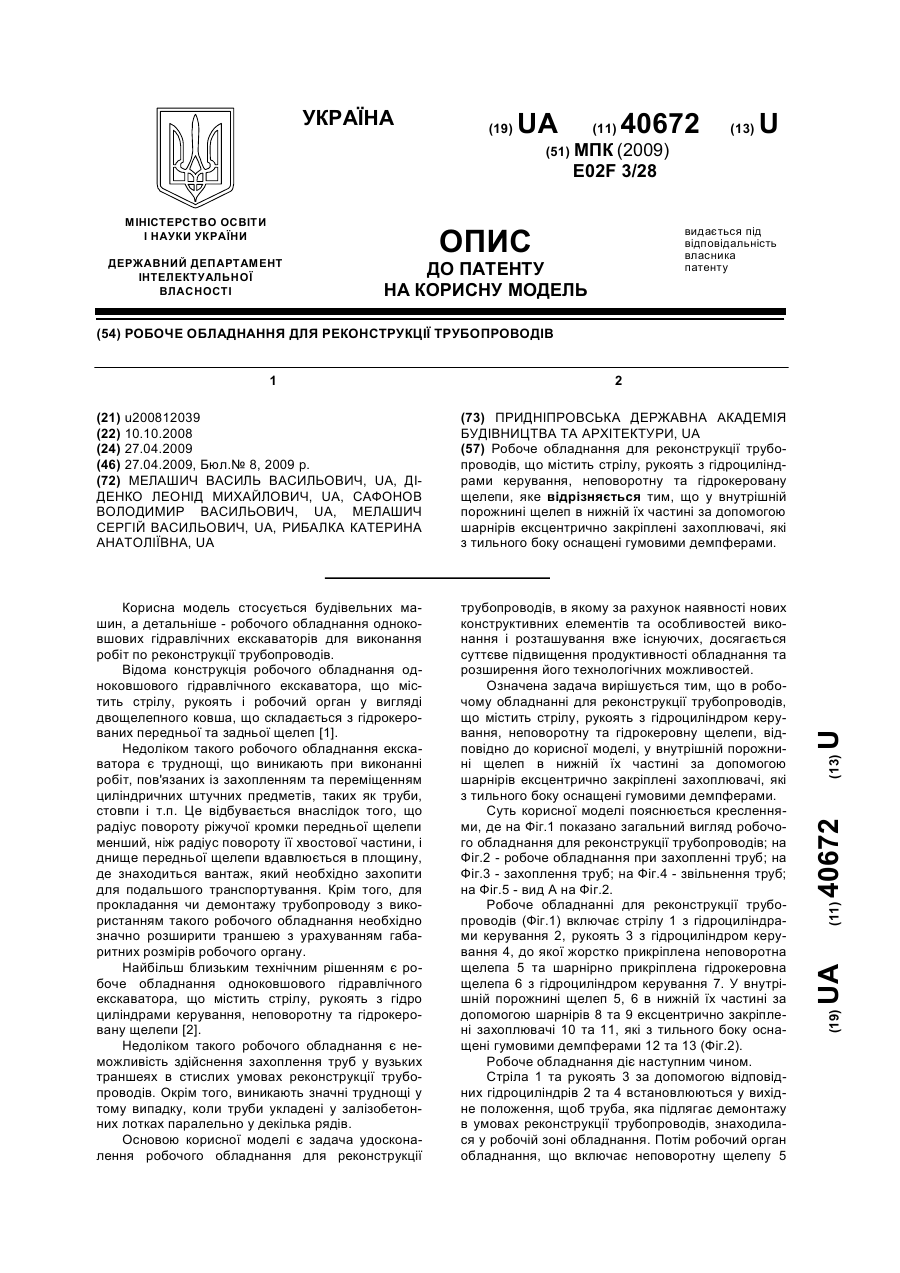
Робоче обладнання для реконструкції трубопроводів, що містить стрілу, рукоять з гідроциліндрами керування, неповоротну та гідрокеровану щелепи, яке відрізняється тим, що у внутрішній порожнині щелеп в нижній їх частині за допомогою шарнірів ексцентрично закріплені захоплювачі, які з тильного боку оснащені гумовими демпферами.
Попередній патент: Робоче обладнання для реконструкції трубопроводів
Наступний патент: Експериментальний вентильний індукторно-реактивний привод
Випадковий патент: Термоелектричний матеріал