Верстат-гексапод
Номер патенту: 54937
Опубліковано: 17.03.2003
Автори: Валявський Іван Анатолійович, Крижанівський Володимир Андрійович
Формула / Реферат
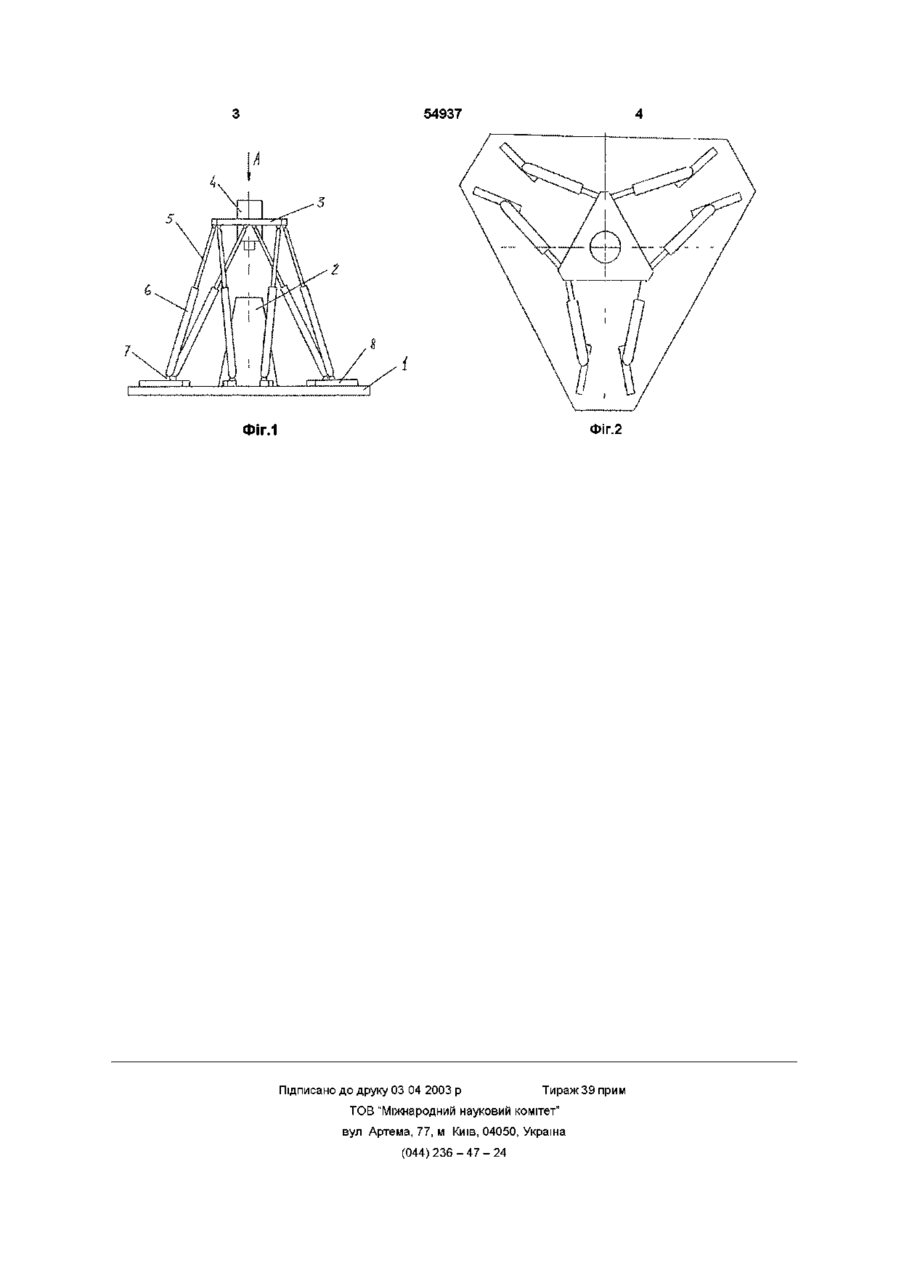
Верстат-гексапод, який складається з нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та вихідні елементи яких шарнірно зв'язані відповідно з нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі.
Текст
Верстат-гексапод, який складається з Винахід відноситься до галузі верстатобудування, а саме до гнучких автоматизованих виробництв Відомий верстат-гексапод, прийнятий в якості прототипу, який складається з рухомої та нерухомої платформ, зв'язаних шістьма механізмами поздовжнього переміщення, та виконавчого органу, встановленого на рухомій платформі (див «Станки и инструмент», 1993, №2 crop 5) Недоліком цього верстату є неефективне співвідношення між об'ємом робочої зони верстата та його габаритами Задача, яку вирішує винахід, полягає в усуненні вказаного недоліку - збільшенні співвідношення між об'ємом робочої зони верстата-гексапода та його габаритами Вказана задача вирішується завдяки тому, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі На фіг 1 представлена конструкція верстатагексапода, загальний вигляд, на фіг 2 - вид А на фіг 1 Верстат (фіг 1) містить нерухому платформу 1, виконану у вигляді плити зі столом 2 для розміщення оброблюваної деталі, рухому платформу 3 з робочим органом 4, шість механізмів поздовжнього переміщення (МПП), нерухомої платформи зі столом, рухомої платформи з робочим органом, шести механізмів поздовжнього переміщення, корпуси та ВИХІДНІ елементи яких шарнірно зв'язані ВІДПОВІДНО З нерухомою та рухомою платформами, який відрізняється тим, що шарніри механізмів поздовжнього переміщення виконані з можливістю їх переміщення вздовж напрямних, розташованих на нерухомій платформі ВИХІДНІ елементи 5 яких шарнірно зв'язані з рухомою платформою 3, а корпуси 6 за допомогою шарнірів 7 - з нерухомою платформою 1, причому шарніри 7 виконані з можливістю переміщення вздовж напрямних 8, розміщених на нерухомій платформі Верстат працює таким чином При одночасній ЗМІНІ довжин МПП відбувається зміна положення робочого органу 4 в просторі, обмеженому діапазоном ходів МПП Для переміщення робочого органу за межами цього діапазону необхідно перемістити шарніри 7 вздовж напрямних 8 Довжина переміщення кожного з шести шарнірів залежить від необхідного напрямку збільшення робочої зони Таким чином задача збільшення співвідношення між об'ємом робочої зони верстата-гексапода та його габаритами вирішується ВІДМІННІСТЬ запропонованої конструкції полягає в тому, що сукупність основних ознак надає конструкції нові, невідомі раніше властивості - можливість зміни форми та розмірів робочого простору врерстата-гексапода за рахунок зміни відстані між ВІДПОВІДНИМИ шарнірами МПП Верстат-гексапод може знайти широке використання в машинобудуванні для формоутворення складних фасонних поверхонь 1 CO Ю 54937 ФІГ.1 Фіг.2 Підписано до друку 03 04 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюHexapod machine
Автори англійськоюKryzhanivskyi Volodymyr Andriiovych, Valiavskyi Ivan Anatoliiovych
Назва патенту російськоюСтанок-гексапод
Автори російськоюКрижанивский Владимир Андреевич, Валявский Иван Анатольевич
МПК / Мітки
МПК: B21D 5/00
Мітки: верстат-гексапод
Код посилання
<a href="https://ua.patents.su/2-54937-verstat-geksapod.html" target="_blank" rel="follow" title="База патентів України">Верстат-гексапод</a>
Стіл
Номер патенту: 54936
Опубліковано: 17.03.2003
Автори: Валявський Іван Анатолійович, Крижанівський Володимир Андрійович
МПК: B23Q 1/00
Мітки: стіл
Формула / Реферат:
Стіл, який складається з основи, виконаної у вигляді призми, рухомої платформи, шести штанг постійної довжини, кінці яких шарнірно зв'язані з рухомою платформою та основою, який відрізняється тим, що шарніри, які зв'язують штанги з основою, виконані з можливістю переміщення вздовж напрямних, розташованих на гранях основи.
Круглопилковий верстат
Номер патенту: 863
Опубліковано: 16.07.2001
Автор: Тарасюк Микола Григорович
Мітки: верстат, круглопилковий
Формула / Реферат:
1. Круглопилковий верстат, який має раму коробчастої форми, електродвигун і шпиндель, з'єднаний з круглою пилкою, змонтованою з можливістю зміни її висоти, який відрізняється тим, що містить рейкову колію, платформу з опорними роликами, встановлену на рейковій колії з можливістю переміщення або загальмовану, і маятник, при цьому електродвигун і шпиндель закріплені на маятнику, маятник змонтовано на рамі з можливістю переміщення вздовж власної...
Верстат для заточування ножів
Номер патенту: 970
Опубліковано: 16.07.2001
Автори: Дуда Алєксандр Ніколаєвіч, Дуда Валєрій Ніколаєвіч, Похвалєнко Вячеслав Дмітрієвіч
МПК: B24B 3/00
Мітки: ножів, верстат, заточування
Формула / Реферат:
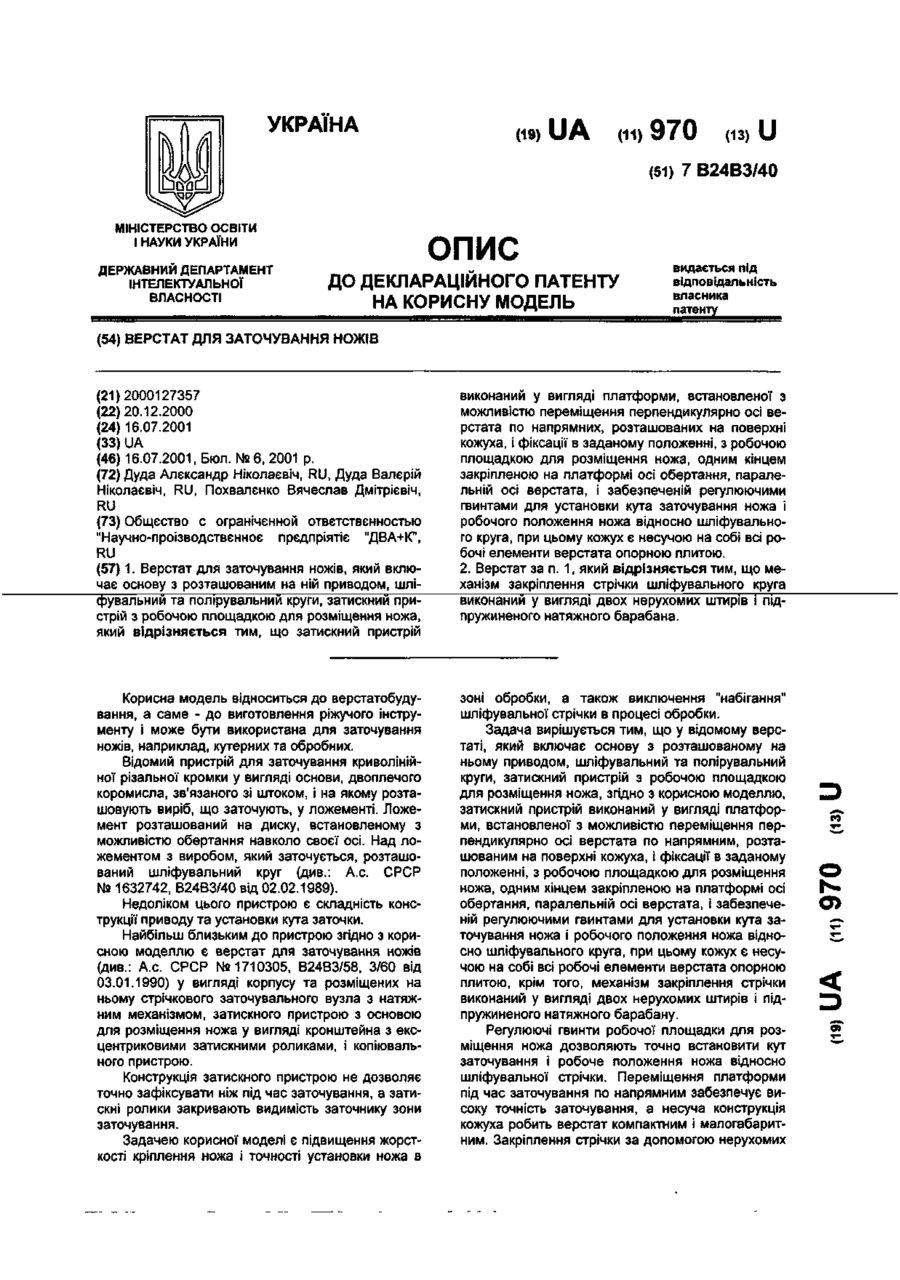
1. Верстат для заточування ножів, який включає основу з розташованим на ній приводом, шліфувальний та полірувальний круги, затискний пристрій з робочою площадкою для розміщення ножа, який відрізняється тим, що затискний пристрій виконаний у вигляді платформи, встановленої з можливістю переміщення перпендикулярно осі верстата по напрямним, розташованим на поверхні кожуха, і фіксації в заданому положенні, з робочою площадкою для розміщення...
Універсальний деревообробний верстат
Номер патенту: 48179
Опубліковано: 15.08.2002
Автор: Наумов Харитон Власович
МПК: B27C 9/00
Мітки: деревообробний, верстат, універсальний
Формула / Реферат:
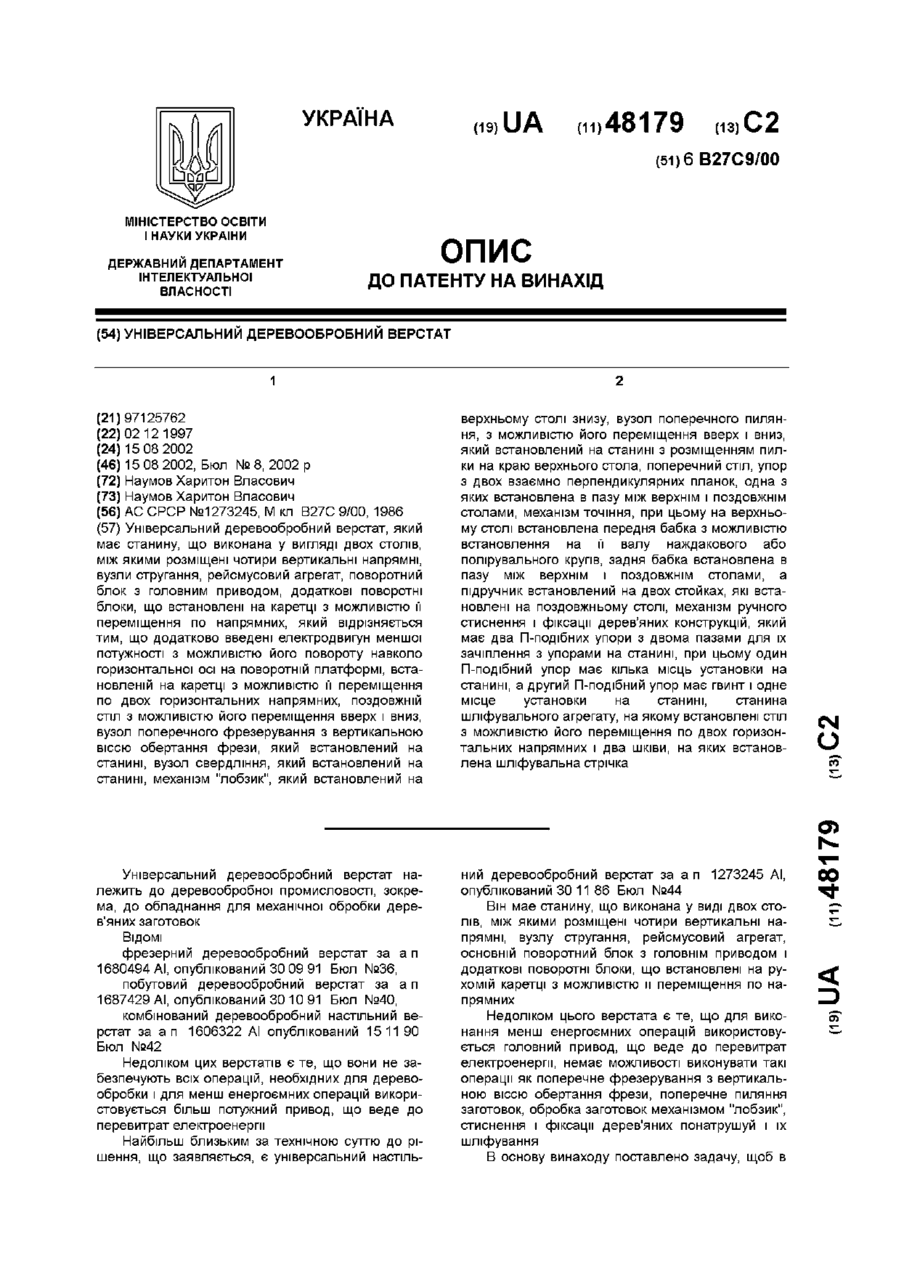
Універсальний деревообробний верстат, який має станину, що виконана у вигляді двох столів, між якими розміщені чотири вертикальні напрямні, вузли стругання, рейсмусовий агрегат, поворотний блок з головним приводом, додаткові поворотні блоки, що встановлені на каретці з можливістю її переміщення по напрямних, який відрізняється тим, що додатково введені електродвигун меншої потужності з можливістю його повороту навколо горизонтальної осі на...
Верстат для буріння свердловин
Номер патенту: 48998
Опубліковано: 16.09.2002
Автори: Турченко Олександр Васильович, Бойко Володимир Петрович, Пейкер Вадим Євгенійович, Сокуренко Микола Іванович
МПК: E21B 15/00, E21B 7/02
Мітки: буріння, свердловин, верстат
Формула / Реферат:
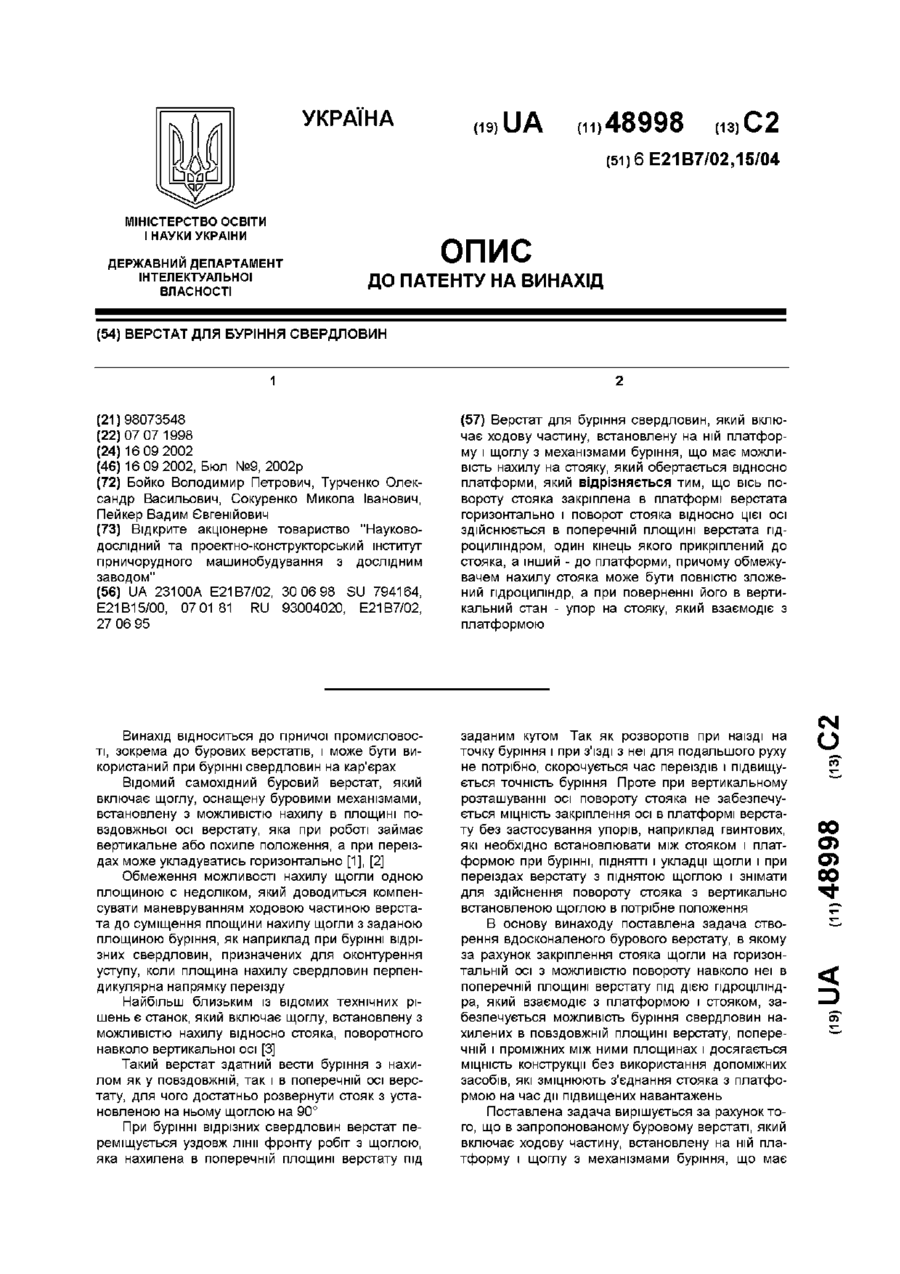
Верстат для буріння свердловин, який включає ходову частину, встановлену на ній платформу і щоглу з механізмами буріння, що має можливість нахилу на стояку, який обертається відносно платформи, який відрізняється тим, що вісь повороту стояка закріплена в платформі верстата горизонтально і поворот стояка відносно цієї осі здійснюється в поперечній площині верстата гідроциліндром, один кінець якого прикріплений до стояка, а інший - до...
Попередній патент: Стіл
Наступний патент: Інструментальна сталь
Випадковий патент: Пристрій для ударного навантаження об'єкту