Електрогідравлічний слідкуючий привід
Номер патенту: 61431
Опубліковано: 25.07.2011
Автори: Артюх Станіслав Федорович, Близниченко Олена Миколаївна, Попов Максим Анатолійович, Канюк Геннадій Іванович
Формула / Реферат
Електрогідравлічний слідкуючий привід, що включає послідовно з'єднані задавальний блок, суматор, електронний підсилювач, електрогідравлічний підсилювач, підключений до виконавчого гідравлічного механізму, датчик положення останнього, ланцюг негативного зворотного зв'язку з паралельно підключеними інтегратором і блоком корекції систематичних похибок давача, який відрізняється тим, що введено додатковий електронний корегуючий пристрій, який розташований між електронним та електрогідравлічним підсилювачами.
Текст
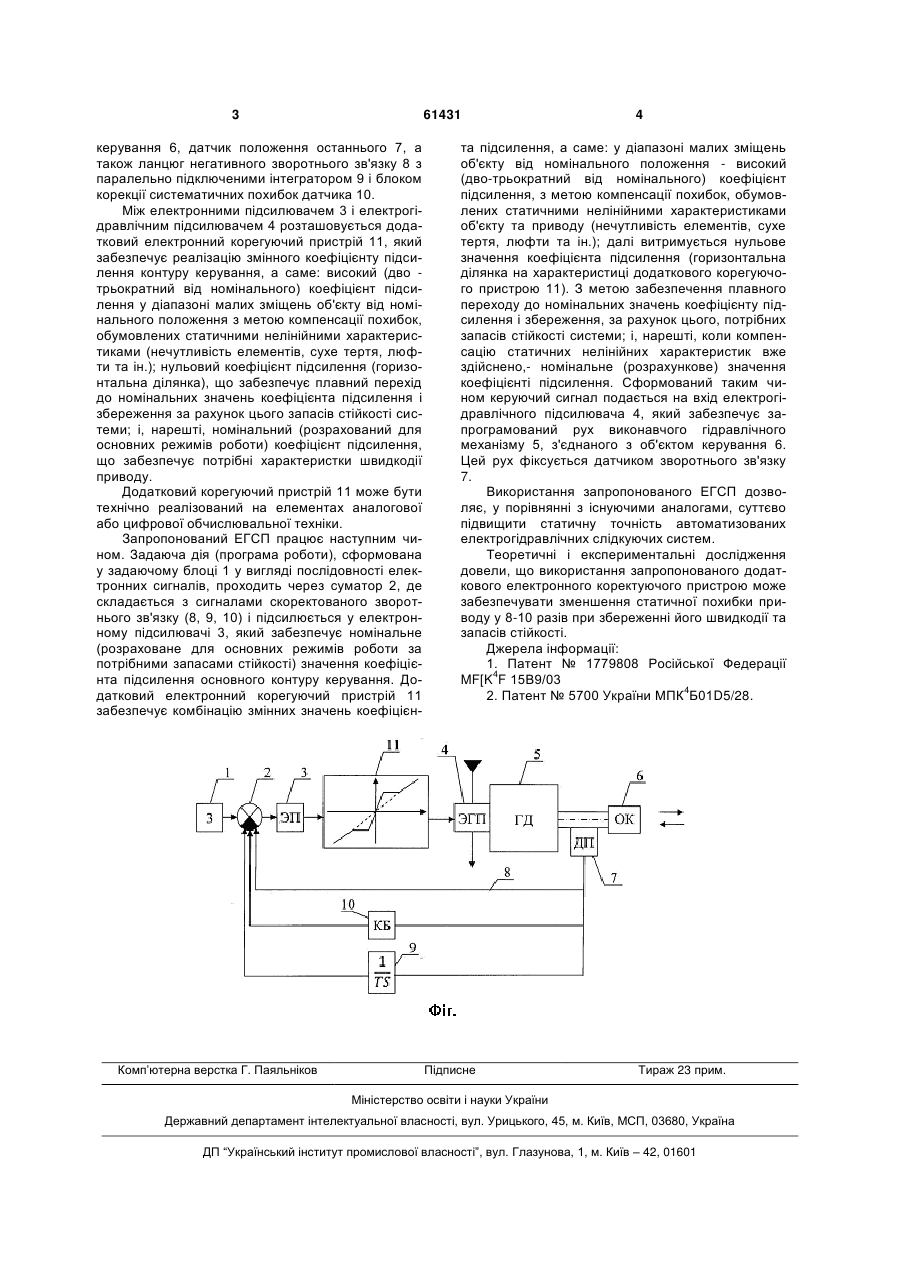
Електрогідравлічний слідкуючий привід, що включає послідовно з'єднані задавальний блок, 3 61431 керування 6, датчик положення останнього 7, а також ланцюг негативного зворотнього зв'язку 8 з паралельно підключеними інтегратором 9 і блоком корекції систематичних похибок датчика 10. Між електронними підсилювачем 3 і електрогідравлічним підсилювачем 4 розташовується додатковий електронний корегуючий пристрій 11, який забезпечує реалізацію змінного коефіцієнту підсилення контуру керування, а саме: високий (дво трьократний від номінального) коефіцієнт підсилення у діапазоні малих зміщень об'єкту від номінального положення з метою компенсації похибок, обумовлених статичними нелінійними характеристиками (нечутливість елементів, сухе тертя, люфти та ін.); нульовий коефіцієнт підсилення (горизонтальна ділянка), що забезпечує плавний перехід до номінальних значень коефіцієнта підсилення і збереження за рахунок цього запасів стійкості системи; і, нарешті, номінальний (розрахований для основних режимів роботи) коефіцієнт підсилення, що забезпечує потрібні характеристки швидкодії приводу. Додатковий корегуючий пристрій 11 може бути технічно реалізований на елементах аналогової або цифрової обчислювальної техніки. Запропонований ЕГСП працює наступним чином. Задаюча дія (програма роботи), сформована у задаючому блоці 1 у вигляді послідовності електронних сигналів, проходить через суматор 2, де складається з сигналами скоректованого зворотнього зв'язку (8, 9, 10) і підсилюється у електронному підсилювачі 3, який забезпечує номінальне (розраховане для основних режимів роботи за потрібними запасами стійкості) значення коефіцієнта підсилення основного контуру керування. Додатковий електронний корегуючий пристрій 11 забезпечує комбінацію змінних значень коефіцієн Комп’ютерна верстка Г. Паяльніков 4 та підсилення, а саме: у діапазоні малих зміщень об'єкту від номінального положення - високий (дво-трьократний від номінального) коефіцієнт підсилення, з метою компенсації похибок, обумовлених статичними нелінійними характеристиками об'єкту та приводу (нечутливість елементів, сухе тертя, люфти та ін.); далі витримується нульове значення коефіцієнта підсилення (горизонтальна ділянка на характеристиці додаткового корегуючого пристрою 11). З метою забезпечення плавного переходу до номінальних значень коефіцієнту підсилення і збереження, за рахунок цього, потрібних запасів стійкості системи; і, нарешті, коли компенсацію статичних нелінійних характеристик вже здійснено,- номінальне (розрахункове) значення коефіцієнті підсилення. Сформований таким чином керуючий сигнал подається на вхід електрогідравлічного підсилювача 4, який забезпечує запрограмований рух виконавчого гідравлічного механізму 5, з'єднаного з об'єктом керування 6. Цей рух фіксується датчиком зворотнього зв'язку 7. Використання запропонованого ЕГСП дозволяє, у порівнянні з існуючими аналогами, суттєво підвищити статичну точність автоматизованих електрогідравлічних слідкуючих систем. Теоретичні і експериментальні дослідження довели, що використання запропонованого додаткового електронного коректуючого пристрою може забезпечувати зменшення статичної похибки приводу у 8-10 разів при збереженні його швидкодії та запасів стійкості. Джерела інформації: 1. Патент № 1779808 Російської Федерації 4 MF[K F 15В9/03 4 2. Патент № 5700 України МПК Б01D5/28. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectro-hydraulic servo-drive
Автори англійськоюKaniuk Hennadii Ivanovych, Artiukh Stanislav Fedorovych, Popov Maksym Anatoliiovych, Blyznichenko Olena Mykolaivna
Назва патенту російськоюЭлектрогидравлический следящий привод
Автори російськоюКанюк Геннадий Иванович, Артюх Станислав Федорович, Попов Максим Анатолиевич, Близниченко Елена Николаевна
МПК / Мітки
МПК: F15B 9/03
Мітки: слідкуючий, електрогідравлічний, привід
Код посилання
<a href="https://ua.patents.su/2-61431-elektrogidravlichnijj-slidkuyuchijj-privid.html" target="_blank" rel="follow" title="База патентів України">Електрогідравлічний слідкуючий привід</a>
Електрогідравлічний слідкуючий привід
Номер патенту: 67680
Опубліковано: 15.06.2004
Автори: Фірсов Сергій Миколайович, Биков Анатолій Васильович, Нарожний Віталій Васильович, Кулік Анатолій Степанович, Лученко Олег Олексійович
МПК: F15B 9/00
Мітки: привід, слідкуючий, електрогідравлічний
Формула / Реферат:
Електрогідравлічний слідкуючий привід, який складається з вимірювача неузгодження, блоків множення, підсилювача, приводу регулюючого органу насоса, гідромотора, датчиків температури і тиску рідини в частинах гідромотора, що обертаються, датчика положення, датчика швидкості, датчика перепаду тиску в гідролініях, інтегратора, суматорів, блока поділу, корегувального пристрою, нелінійних блоків і релейного елемента, який відрізняється тим, що в...
Слідкуючий електрогідравлічний привід
Номер патенту: 69128
Опубліковано: 16.08.2004
Автори: Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Нарожний Віталій Васильович, Лученко Олег Олексійович, Гісцова Тетяна Іванівна
МПК: F15B 9/00
Мітки: електрогідравлічний, привід, слідкуючий
Формула / Реферат:
Слідкуючий електрогідравлічний привід, що складається з гідравлічно з'єднаних реверсивно регульованого насоса і виконавчого гідроциліндра з датчиком положення його штока, підключеним через суматори до механізму керування кутом повороту регулюючого органа, допоміжного насоса, датчика кута повороту, бака і клапанів підживлення, привідного електродвигуна реверсивно регульованого насоса, датчика сили споживаного струму і обмежника-формувача, який...
Слідкуючий електрогідравлічний привід
Номер патенту: 13538
Опубліковано: 17.04.2006
Автори: Нарожний Віталій Володимирович, Фірсов Сергій Миколайович, Кальченко Олег Володимирович, Бандура Іван Миколайович
МПК: F15B 9/00
Мітки: привід, електрогідравлічний, слідкуючий
Формула / Реферат:
Слідкуючий електрогідравлічний привід, що містить гідравлічно з'єднані реверсивно регульований насос і виконавчий гідроциліндр з датчиком положення його штока, підключений через перший і другий суматори до механізму керування кутом повороту регулюючого органа, допоміжного насоса, датчика кута повороту, бака й клапанів підживлення, привідного електродвигуна реверсивно регульованого насоса, датчика споживаного струму, обмежника-формувача,...
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Лученко Олег Олексійович, Нарожний Віталій Васильович, Таран Олександр Миколайович
МПК: F15B 9/00
Мітки: слідкуючий, електрогідравлічний, привід
Формула / Реферат:
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...
Електрогідравлічний слідкуючий привод
Номер патенту: 25434
Опубліковано: 10.08.2007
Автори: Ботигін Адольф Валеріанович, Мокроуз Василь Климентійович, Вялін Олексій Пантелеєвич, Сергєєв Анатолій Іванович
МПК: F15B 9/00
Мітки: слідкуючий, електрогідравлічний, привод
Формула / Реферат:
Електрогідравлічний слідкуючий привод, що містить електродвигун, розташовані в корпусі і охоплені гідравлічними, механічними і електричними зв'язкаминасос з регулятором його виробності, виконаним у вигляді люльки (3), взаємодіючої з однієї сторони з підпружиненим штовхачем (4), пружина (5) якого настроєна на максимальну виробність насоса, а з іншої - з плунжером (6) регулятора, розташованим у циліндрі з лівою торцевою порожниною (7) і...
Попередній патент: Пристрій для розточування отворів
Наступний патент: Електрогідравлічний слідкуючий привід з астатичним електронним регулятором
Випадковий патент: Дисковий плуг та диск для оранки