Електрогідравлічний слідкуючий привід з автономним регулятором положення сервоклапана
Номер патенту: 61448
Опубліковано: 25.07.2011
Автори: Артюх Станіслав Федорович, Попов Максим Анатолійович, Близниченко Олена Миколаївна, Канюк Генадій Іванович
Формула / Реферат
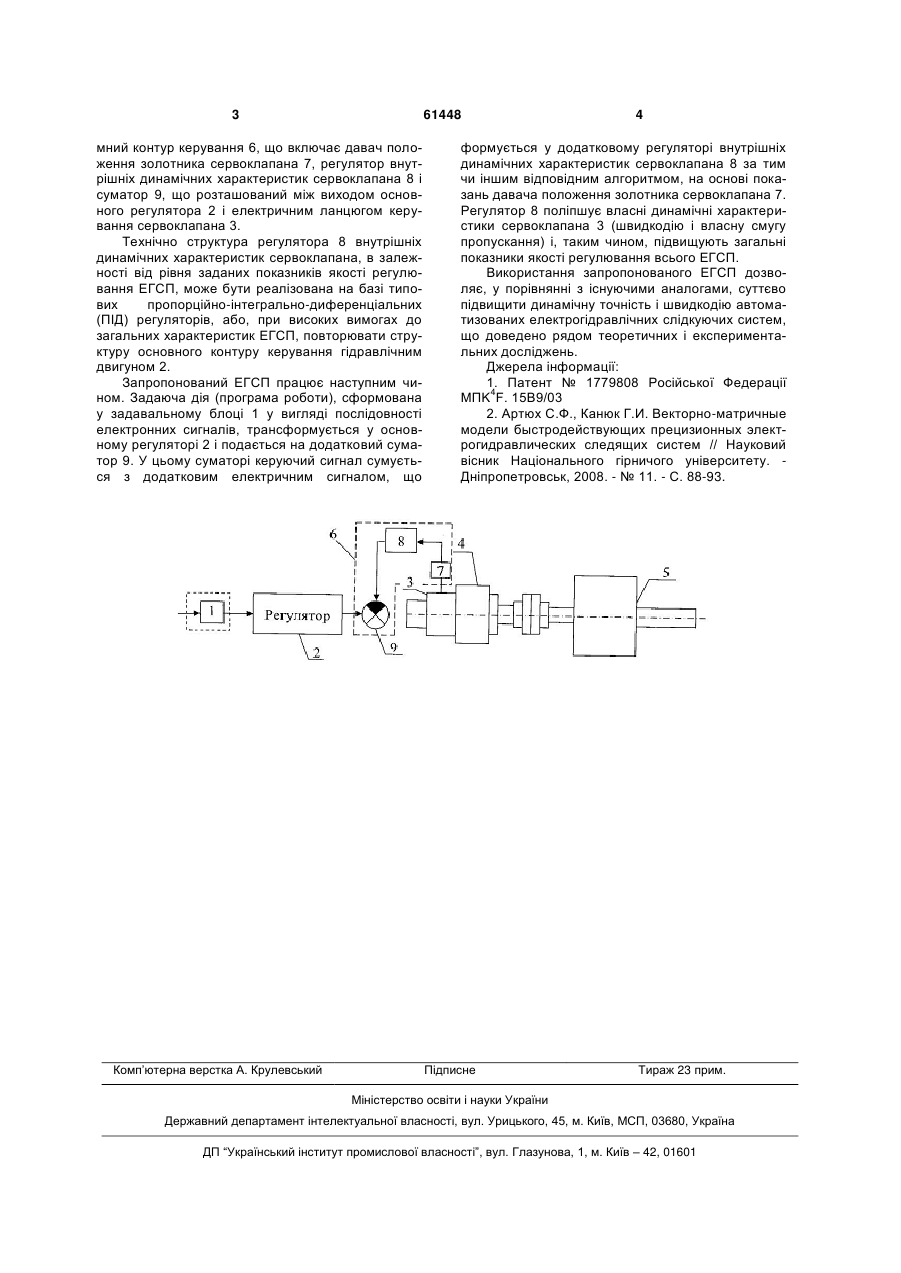
Електрогідравлічний слідкуючий привід з автономним регулятором положення сервоклапана, який включає послідовно з'єднані задавальний блок, електронний регулятор основного контуру керування гідравлічним двигуном, сервоклапан і гідравлічний двигун, з'єднаний з об'єктом керування, який відрізняється тим, що введено додатковий електронний блок, що включає давач положення золотника, автономний регулятор керування сервоклапаном і суматор, який розташований між електронним виходом регулятора основного контуру керування гідродвигуном і електричним входом сервоклапана.
Текст
Електрогідравлічний слідкуючий привід з автономним регулятором положення сервоклапана, 3 61448 мний контур керування 6, що включає давач положення золотника сервоклапана 7, регулятор внутрішніх динамічних характеристик сервоклапана 8 і суматор 9, що розташований між виходом основного регулятора 2 і електричним ланцюгом керування сервоклапана 3. Технічно структура регулятора 8 внутрішніх динамічних характеристик сервоклапана, в залежності від рівня заданих показників якості регулювання ЕГСП, може бути реалізована на базі типових пропорційно-інтегрально-диференціальних (ПІД) регуляторів, або, при високих вимогах до загальних характеристик ЕГСП, повторювати структуру основного контуру керування гідравлічним двигуном 2. Запропонований ЕГСП працює наступним чином. Задаюча дія (програма роботи), сформована у задавальному блоці 1 у вигляді послідовності електронних сигналів, трансформується у основному регуляторі 2 і подається на додатковий суматор 9. У цьому суматорі керуючий сигнал сумується з додатковим електричним сигналом, що Комп’ютерна верстка А. Крулевський 4 формується у додатковому регуляторі внутрішніх динамічних характеристик сервоклапана 8 за тим чи іншим відповідним алгоритмом, на основі показань давача положення золотника сервоклапана 7. Регулятор 8 поліпшує власні динамічні характеристики сервоклапана 3 (швидкодію і власну смугу пропускання) і, таким чином, підвищують загальні показники якості регулювання всього ЕГСП. Використання запропонованого ЕГСП дозволяє, у порівнянні з існуючими аналогами, суттєво підвищити динамічну точність і швидкодію автоматизованих електрогідравлічних слідкуючих систем, що доведено рядом теоретичних і експериментальних досліджень. Джерела інформації: 1. Патент № 1779808 Російської Федерації 4 MПK F. 15В9/03 2. Артюх С.Ф., Канюк Г.И. Векторно-матричные модели быстродействующих прецизионных электрогидравлических следящих систем // Науковий вісник Національного гірничого університету. Дніпропетровськ, 2008. - № 11. - С. 88-93. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectro-hydraulic servo drive with autonomous controller of position of servo-valve
Автори англійськоюKaniuk Hennadii Ivanovych, Artiukh Stanislav Fedorovych, Popov Maksym Anatoliiovych, Blyznichenko Olena Mykolaivna
Назва патенту російськоюЭлектрогидравлический следящий привод с автономным регулятором положения сервоклапана
Автори російськоюКанюк Геннадий Иванович, Артюх Станислав Федорович, Попов Максим Анатолиевич, Близниченко Елена Николаевна
МПК / Мітки
МПК: F15B 9/03
Мітки: автономним, слідкуючий, електрогідравлічний, регулятором, сервоклапана, положення, привід
Код посилання
<a href="https://ua.patents.su/2-61448-elektrogidravlichnijj-slidkuyuchijj-privid-z-avtonomnim-regulyatorom-polozhennya-servoklapana.html" target="_blank" rel="follow" title="База патентів України">Електрогідравлічний слідкуючий привід з автономним регулятором положення сервоклапана</a>
Електрогідравлічний слідкуючий привід з астатичним електронним регулятором
Номер патенту: 61432
Опубліковано: 25.07.2011
Автори: Артюх Станіслав Федорович, Канюк Геннадій Іванович, Близниченко Олена Миколаївна, Попов Максим Анатолійович
МПК: F15B 9/03
Мітки: електронним, слідкуючий, електрогідравлічний, регулятором, привід, астатичним
Формула / Реферат:
Електрогідравлічний слідкуючий привід з астатичним електронним регулятором, що включає послідовно з'єднані задавач, електронний регулятор, сервоклапан і датчик зворотного зв'язку, який відрізняється тим, що електронний регулятор включає послідовно з'єднані суматор з п'ятьма входами, п'ять інтеграторів, суматор з чотирма входами, а також вісім пропорційних елементів, за допомогою котрих організовано чотири негативних зворотних зв'язки - від...
Електрогідравлічний слідкуючий привід
Номер патенту: 61431
Опубліковано: 25.07.2011
Автори: Близниченко Олена Миколаївна, Канюк Геннадій Іванович, Попов Максим Анатолійович, Артюх Станіслав Федорович
МПК: F15B 9/03
Мітки: привід, електрогідравлічний, слідкуючий
Формула / Реферат:
Електрогідравлічний слідкуючий привід, що включає послідовно з'єднані задавальний блок, суматор, електронний підсилювач, електрогідравлічний підсилювач, підключений до виконавчого гідравлічного механізму, датчик положення останнього, ланцюг негативного зворотного зв'язку з паралельно підключеними інтегратором і блоком корекції систематичних похибок давача, який відрізняється тим, що введено додатковий електронний корегуючий пристрій, який...
Слідкуючий електрогідравлічний привід
Номер патенту: 69128
Опубліковано: 16.08.2004
Автори: Фірсов Сергій Миколайович, Нарожний Віталій Васильович, Гісцова Тетяна Іванівна, Лученко Олег Олексійович, Кулік Анатолій Степанович
МПК: F15B 9/00
Мітки: привід, слідкуючий, електрогідравлічний
Формула / Реферат:
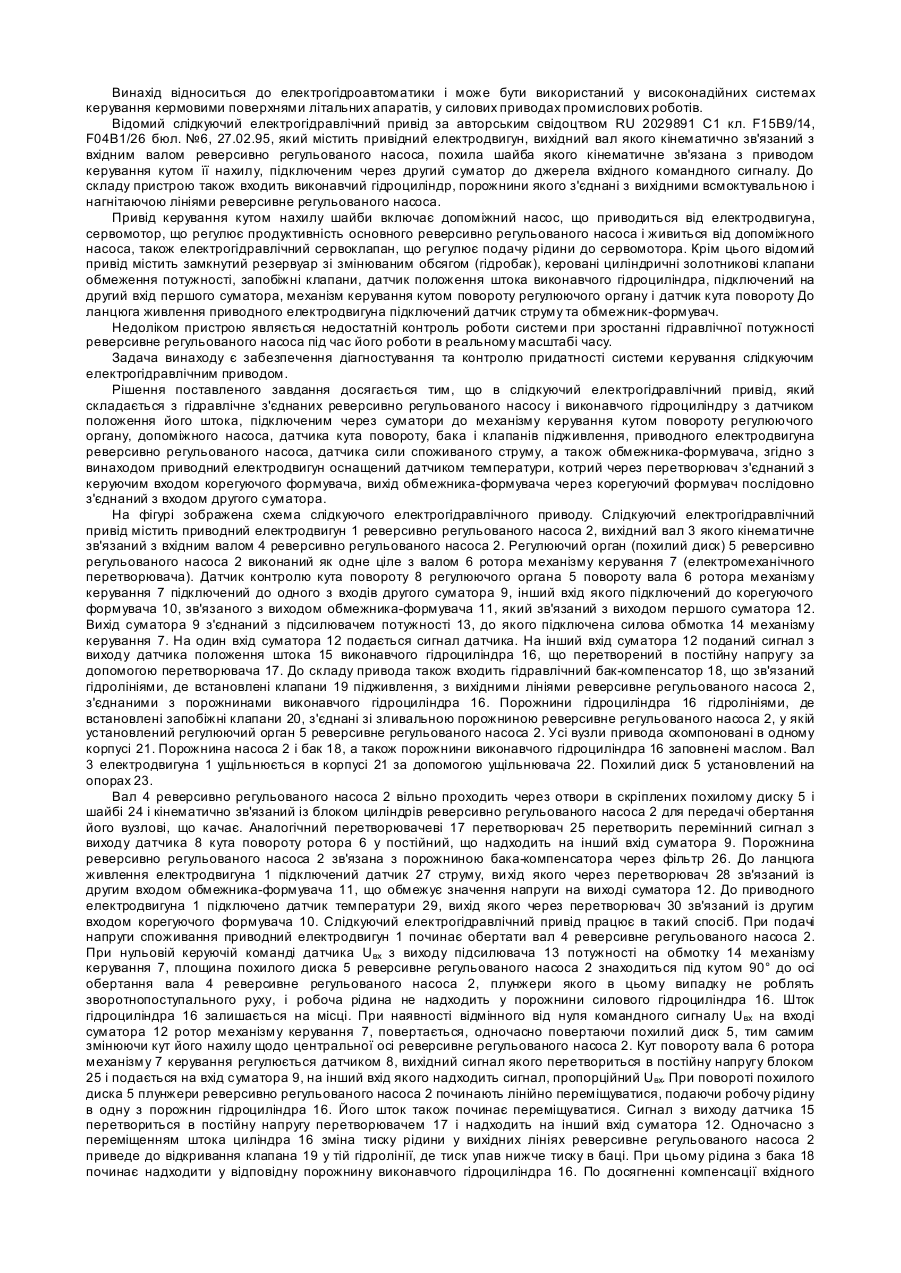
Слідкуючий електрогідравлічний привід, що складається з гідравлічно з'єднаних реверсивно регульованого насоса і виконавчого гідроциліндра з датчиком положення його штока, підключеним через суматори до механізму керування кутом повороту регулюючого органа, допоміжного насоса, датчика кута повороту, бака і клапанів підживлення, привідного електродвигуна реверсивно регульованого насоса, датчика сили споживаного струму і обмежника-формувача, який...
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Лученко Олег Олексійович, Фірсов Сергій Миколайович, Нарожний Віталій Васильович, Таран Олександр Миколайович, Кулік Анатолій Степанович
МПК: F15B 9/00
Мітки: привід, слідкуючий, електрогідравлічний
Формула / Реферат:
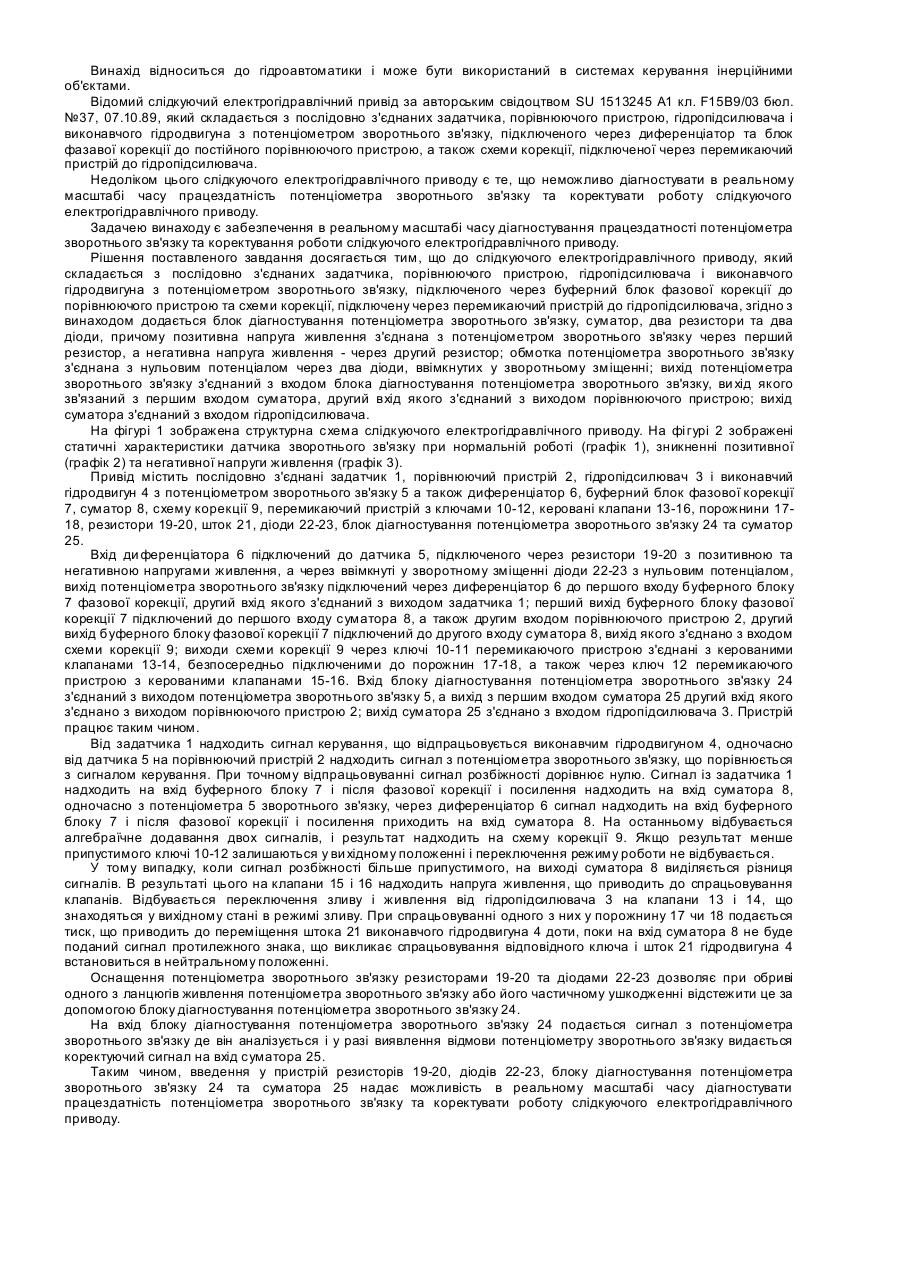
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...
Електрогідравлічний слідкуючий привід
Номер патенту: 67680
Опубліковано: 15.06.2004
Автори: Лученко Олег Олексійович, Биков Анатолій Васильович, Фірсов Сергій Миколайович, Нарожний Віталій Васильович, Кулік Анатолій Степанович
МПК: F15B 9/00
Мітки: привід, слідкуючий, електрогідравлічний
Формула / Реферат:
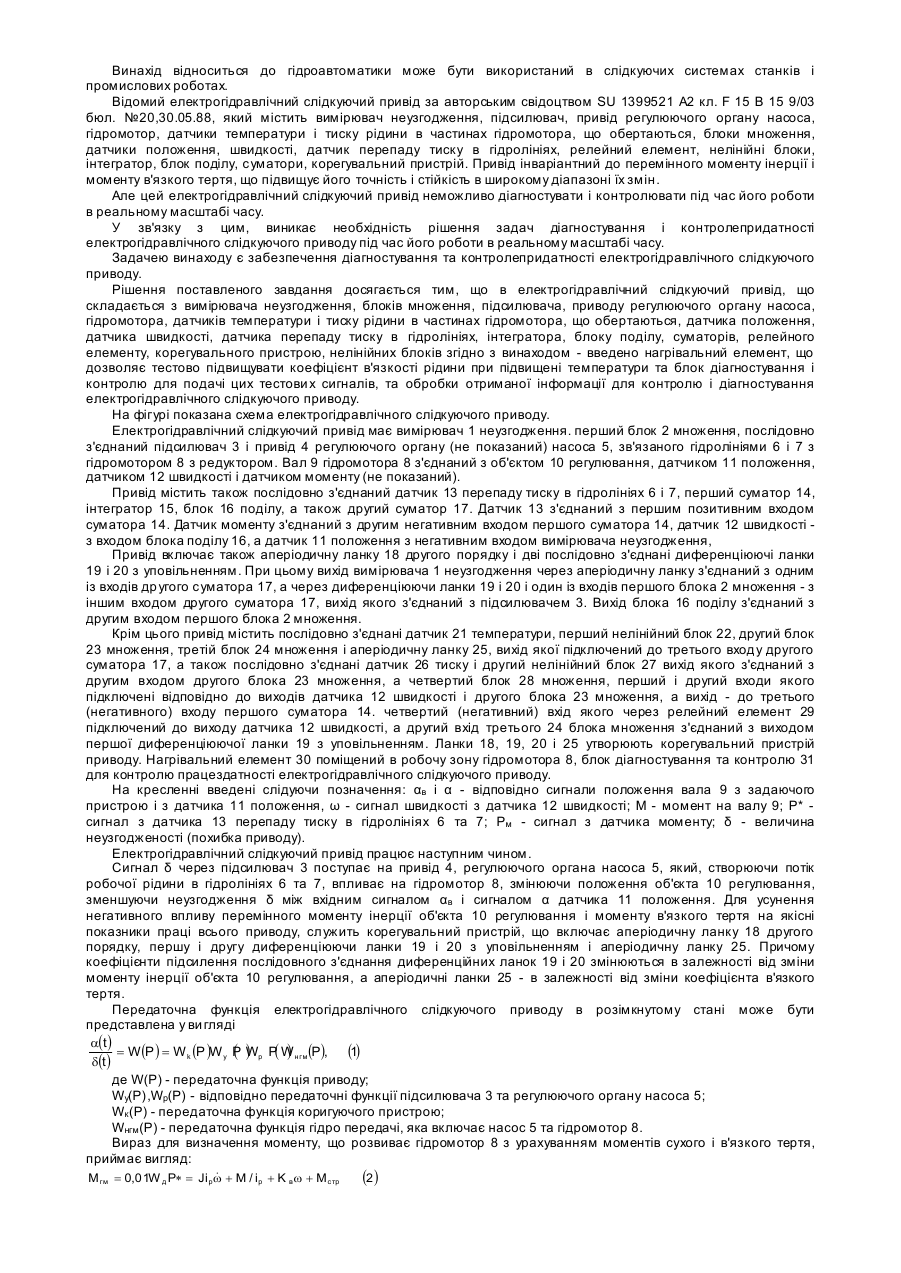
Електрогідравлічний слідкуючий привід, який складається з вимірювача неузгодження, блоків множення, підсилювача, приводу регулюючого органу насоса, гідромотора, датчиків температури і тиску рідини в частинах гідромотора, що обертаються, датчика положення, датчика швидкості, датчика перепаду тиску в гідролініях, інтегратора, суматорів, блока поділу, корегувального пристрою, нелінійних блоків і релейного елемента, який відрізняється тим, що в...
Попередній патент: Спосіб боротьби з пученням підошви у підготовчих виробках
Наступний патент: Антипідробна пляшкова кришка