Спосіб пасивної локації джерела квазіперіодичного сигналу
Формула / Реферат
Спосіб пасивної локації джерела квазіперіодичного сигналу, згідно з яким визначають період повторення сигналу ![]() сигнал приймають та реєструють у парах просторово рознесених точок з відомими координатами, кількість пар точок прийому сигналу встановлюють не менше розмірності системи координат, що використовується для відображення розташування точок прийому сигналу та його джерела, визначають різниці часу розповсюдження сигналів від джерела до точок прийому сигналу для пар точок прийому, визначають координати джерела за відомими координатами пар точок прийому, відповідним цим точкам різницям часу розповсюдження сигналу від джерела до цих точок та відомій швидкості розповсюдження сигналу
сигнал приймають та реєструють у парах просторово рознесених точок з відомими координатами, кількість пар точок прийому сигналу встановлюють не менше розмірності системи координат, що використовується для відображення розташування точок прийому сигналу та його джерела, визначають різниці часу розповсюдження сигналів від джерела до точок прийому сигналу для пар точок прийому, визначають координати джерела за відомими координатами пар точок прийому, відповідним цим точкам різницям часу розповсюдження сигналу від джерела до цих точок та відомій швидкості розповсюдження сигналу ![]() який відрізняється тим, що визначають похибку визначення періоду повторення сигналу
який відрізняється тим, що визначають похибку визначення періоду повторення сигналу ![]() встановлюють просторовий рознос
встановлюють просторовий рознос ![]() для пар точок прийому сигналу за умови
для пар точок прийому сигналу за умови ![]() де
де ![]() - номер пари точок, визначають для цих пар точок відповідні їм різниці часу розповсюдження сигналу від джерела до цих точок та їх похибки визначення при синхронній реєстрації сигналів у точках прийому, визначають координати джерела та їх похибки визначення, порівнюють величини цих похибок з відомими заданими значеннями і при умові перевищення величинами похибок заданих значень починають цикл уточнення координат джерела, для чого збільшують просторовий рознос між парами точок прийому сигналу та визначають очікувані різниці часу розповсюдження сигналу від джерела до точок кожної пари
- номер пари точок, визначають для цих пар точок відповідні їм різниці часу розповсюдження сигналу від джерела до цих точок та їх похибки визначення при синхронній реєстрації сигналів у точках прийому, визначають координати джерела та їх похибки визначення, порівнюють величини цих похибок з відомими заданими значеннями і при умові перевищення величинами похибок заданих значень починають цикл уточнення координат джерела, для чого збільшують просторовий рознос між парами точок прийому сигналу та визначають очікувані різниці часу розповсюдження сигналу від джерела до точок кожної пари ![]() та їх похибки
та їх похибки ![]() по координатах джерела звуку, їх похибках, швидкості звуку та відомих поточних координатах точок прийому, збільшення просторового розносу між парами точок припиняють при виконанні умови, що
по координатах джерела звуку, їх похибках, швидкості звуку та відомих поточних координатах точок прийому, збільшення просторового розносу між парами точок припиняють при виконанні умови, що ![]() після чого реєструють сигнали в цих точках прийому з часом затримки між часом початку реєстрації сигналів у точках прийому, рівним
після чого реєструють сигнали в цих точках прийому з часом затримки між часом початку реєстрації сигналів у точках прийому, рівним ![]() , визначають для цих пар точок відповідні їм різниці часових затримок зареєстрованих сигналів у цих точках
, визначають для цих пар точок відповідні їм різниці часових затримок зареєстрованих сигналів у цих точках ![]() та їх похибки визначення
та їх похибки визначення ![]() а різницю часу розповсюдження сигналу від джерела до цих точок прийому визначають, як
а різницю часу розповсюдження сигналу від джерела до цих точок прийому визначають, як ![]() та її похибку
та її похибку ![]() знову визначають координати джерела та їх похибки визначення, порівнюють величини цих похибок з відомими заданими значеннями.
знову визначають координати джерела та їх похибки визначення, порівнюють величини цих похибок з відомими заданими значеннями.
Текст
Винахід відноситься до галузі вимірювальної техніки, а точніше до способів пасивної локації джерел просторових сигналів, наприклад, звукових коливань, електромагнітних хвиль, в яких координати джерела сигналу встановлюють, як точку перетину пеленгів або геометричних місць точок можливого знаходження джерела сигналу, кожний з яких визначається для пари просторово рознесених точок прийому по відомих швидкості просторового розповсюдження сигналу V, координатах цих точок прийому сигналу та різниці часів розповсюдження сигналу від джерела до цих точок прийому сигналу. Характерною особливістю даного винаходу є квазіперіодичний часово-просторовий характер сигналу від джерела, який є типовим для широкого класу періодично працюючих джерел сигналу, таких як двигуни, маяки, просторові маркери. Такі сигнали характеризуються не тільки періодичністю, але й можливими широкосмуговістю та наявністю випадкової складової. Відомий спосіб пасивної локації джерела квазіперіодичного сигналу, згідно якого визначають період повторення сигналу ТП, сигнал приймають та реєструють у парах просторово рознесених точок з відомими координатами, кількість пар точок прийому сигналу встановлюють не менше розмірності системи координат, що використовується для відображення розташування точок прийому сигналу та його джерела, визначають координати джерела за відомими координатами пар точок прийому, відповідним цим точкам різницям часів розповсюдження сигналу від джерела до цих точок та відомій швидкості розповсюдження сигналу, а різницю часів розповсюдження сигналу до точок прийому сигналу для пар точок прийому визначають по випадковим складовим зареєстрованих сигналів [Патент США №5099456, МПК G01S3/80 від 24.03.1992р.]. Однак в цьому способі пасивної локації джерела квазіперіодичного сигналу визначення різниці часів розповсюдження сигналу до точок прийому для пар точок прийому по випадковим складовим зареєстрованих сигналів обмежується самою наявністю випадкової складової. Наприклад, для джерела квазіперіодичного сигналу типу двигуна, при його доброму технічному стані, величина випадкової складової сигналу, у порівнянні з середнім рівнем загального сигналу та з сигналами зовнішніх завад, може бути недопустимо малою, щоб забезпечити можливість технічної реалізації даного способу пасивної локації. Найбільш близьким до винаходу є спосіб пасивної локації джерела квазіперіодичного сигналу, згідно якого визначають період повторення сигналу ТП, сигнал приймають та реєструють у парах просторово рознесених точок з відомими координатами, кількість пар точок прийому сигналу встановлюють не менше розмірності системи координат, що використовується для відображення розташування точок прийому сигналу та його джерела, визначають різниці часів розповсюдження сигналів від джерела до точок прийому сигналу для пар точок прийому, визначають координати джерела за відомими координатами пар точок прийому, відповідним цим точкам різницям часів розповсюдження сигналу від джерела до цих точок та відомій швидкості розповсюдження сигналу V. Точки прийому сигналу розташовують на просторово жорсткій базі, причому просторовий рознос для одної пари точок встановлюють малий рознос, менший V×ТП, а для іншої пари точок прийому встановлюють великий рознос, більший V×ТП. Базу розташування точок прийому сигналу зміщують у просторі та визначають різниці часів розповсюдження сигналу від джерела до відповідних точок прийому відповідно просторовому зміщенню бази по інтерференції сигналів зареєстрованих у відповідних точках прийому сигналу. При цьому точне, але багатозначне визначення різниці часів розповсюдження сигналу від джерела до відповідних точок прийому здійснюють по зареєстрованим сигналам у просторових точках прийому з великим розносом, а усунення багатозначності здійснюють по зареєстрованим сигналам у просторових точках прийому з малим розносом [Патент США №4734702, МПК G01S5/02 від 29.03.1988 р.]. Однак в даному способі пасивної локації джерела квазіперіодичного сигналу визначення різниці часів розповсюдження сигналу від джерела до відповідних точок прийому сигналу є технічно складною та недостатньо надійною з точки зору усунення багатозначності, що обумовлюється фіксованим їх розташуванням на жорсткій базі і обмежує можливість визначення координат джерел сигналів з різними періодами повторення при збереженні точності визначення координат джерел сигналу. Крім того, застосування інтерференційних способів визначення різниці часів розповсюдження сигналу від джерела до відповідних точок прийому сигналу обмежує можливість використання цього способу для сигналів широкосмугових та з випадковою складовою. В основу винаходу поставлено задачу створення способу пасивної локації джерела квазіперіодичного сигналу незалежного від періоду повторення сигналу, його можливої широкосмуговості та наявності випадкової складової з можливістю визначення координат джерела сигналу однозначно та з наперед заданою точністю. Поставлене завдання вирішується тим, що в способі пасивної локації джерела квазіперіодичного сигналу, згідно якого визначають період повторення сигналу ТП, сигнал приймають та реєструють у парах просторово рознесених точок з відомими координатами, кількість пар точок прийому сигналу встановлюють не менше розмірності системи координат, що використовується для відображення розташування точок прийому сигналу та його джерела, визначають різниці часів розповсюдження сигналів від джерела до точок прийому сигналу для пар точок прийому, визначають координати джерела за відомими координатами пар точок прийому, відповідним цим точкам різницям часів різницям часів розповсюдження сигналу від джерела до цих точок та відомій швидкості розповсюдження сигналу V, згідно з винаходом, визначають похибку визначення періоду повторення сигналу ( ) DТ П , встановлюють просторовий рознос d для пар точок прийому сигналу за умови di £ V × Т П - DТ П , де і i номер пари точок, визначають для цих пар точок відповідні їм різниці часів розповсюдження сигналу від джерела до цих точок та їх по хибки визначення при синхронній реєстрації сигналів у точках прийому, визначають координати джерела та їх похибки визначення, порівнюють величини цих похибок з відомими заданими значеннями і при умові перевищення величинами похибок заданих значень починають цикл уточнення координат джерела, для чого збільшують просторовий рознос між парами точок прийому сигналу та визначають очікувані TO DТ Oi i P по координатам різниці часів розповсюдження сигналу від джерела до точок кожної пари P та їх похибки джерела звуку, їх похибкам, швидкості звуку та відомим поточним координатам точок прийому, збільшення просторового розносу між парами точок припиняють при виконанні умови, що DT Oi = TП - DТ П P , після чого реєструють сигнали в цих точках прийому з часом затримки між часами початку реєстрації сигналів у точках прийому рівним DТ Oi , визначають для цих пар точок відповідні їм різниці часових затримок зареєстрованих сигналів у цих точках t i , та їх похибки визначення Dt i , а різницю часу розповсюдження сигналу від джерела до P T i = TO + t i DTP i = Dt 1 P цих точок прийому визначають, як P , та її похибку , знову визначають координати джерела та їх похибки визначення, порівнюють величини цих похибок з відомими заданими значеннями. Визначення похибки визначення періоду повторення сигналу D TП дозволяє встановити первинний просторовий рознос між парами точок прийому при невідомих координатах джерела сигналу найбільшої ( ) d = V × Т П - DТ П величини i , де і - номер пари точок, при гарантованій відсутності періодичної просторово часової неоднозначності визначення різниці часів розповсюдження сигналу від джерела до даних точок прийому для любої величини періоду повторення сигналу ТП. Пряме часове визначення різниці часів розповсюдження сигналу від джерела до точок прийому, наприклад, кореляційними способами по сигналах зареєстрованих у парі TП - D Т П точок прийому на інтервалах часу рівних , дає можливість визначення координат джерела квазіперіодичного сигналу, як широкосмугового, так і з випадковою складовою. Синхронна реєстрація сигналів d = V × Т П - DТ П при відомих просторових розносах i пар точок їх прийому і їх відомих координатах та визначенні відповідних цим парам точок прийому різниць часів розповсюдження сигналу від джерела до точок прийому та величин їх по хибок дозволяє первинно визначити координати джерела сигналу та їх по хибки. Порівняння визначених похибок координат джерела сигналу з відомими заданими значеннями, що обумовлюють потрібну точність визначення координат джерела сигналу, дає можливість прийняти рішення про доцільність уточнення цих координат при перевищенні величинами похибок визначення координат заданих значень. Таке уточнення координат джерела сигналу можливо проводити циклічно при збільшенні просторового розносу між точками прийому сигналу та при однозначному визначенні різниці часів розповсюдження сигналу від джерела до точок прийому без втрати точності її визначення. Для цього в поточному циклі уточнення координат джерела сигналу збільшують просторовий рознос між парами точок прийому сигналу та визначають очікувані різниці часів ( ) O TO DTPi розповсюдження сигналу від джерела до точок кожної пари Pi та їх похибки по координатам джерела звуку, їх похибкам, швидкості звуку та відомим поточним координатам точок прийому і припиняють збільшення O DTPi = TП - DТ П просторового розносу між парами точок при виконанні умови, що , після чого реєструють сигнали в цих точках прийому з часом затримки між часами початку реєстрації сигналів у точках прийому рівним O TPi , визначають для цих пар точок відповідні їм різниці часових затримок зареєстрованих сигналів у ци х точках t i , та їх похибки визначення Dt i , а різницю часу розповсюдження сигналу від джерела до цих точок прийому O T = TPi + ti визначають, як Pi , та її похибку DTPi = Dt i , знову визначають координати джерела та їх похибки визначення, порівнюють величини цих похибок з відомими заданими значеннями. Спосіб пасивної локації джерела квазіперіодичного сигналу здійснюють у наступній послідовності. Спочатку визначають період повторення сигналу від джерела Т та величину похибки його визначення D TП , після чого П ( ) d = V × Т П - DТ П встановлюють просторовий рознос d1 для пар точок прийому сигналу за умови i , де і - номер пари точок, визначають для цих пар точок відповідні їм різниці часів розповсюдження сигналу від джерела до цих точок та їх по хибки визначення при синхронній реєстрації сигналів у точках прийому. Визначають координати джерела та їх похибки визначення за відомими координатами пар точок прийому, відповідним цим точкам різницям часів розповсюдження сигналу від джерела до цих точок та відомій швидкості розповсюдження сигналу V. Порівнюють визначені величини похибок визначення координат джерела сигналу з відомими заданими величинами, які обумовлюють задану точність визначення координат джерела, і у випадку перевищення величинами цих похибок заданих значень починають цикл уточнення координат джерела сигналу. Для цього збільшують просторовий рознос між парами точок прийому сигналу та визначають очікувані різниці часів O TO DTPi розповсюдження сигналу від джерела до точок кожної пари Pi та їх похибки по координатам джерела звуку, їх похибкам, швидкості звуку та відомим поточним координатам точок прийому і припиняють збільшення O DTPi = TП - DТ П просторового розносу між парами точок при виконанні умови, що , після чого реєструють сигнали в цих точках прийому з часом затримки між часами початку реєстрації сигналів у точках прийому рівним O TPi , визначають для цих пар точок відповідні їм різниці часових затримок зареєстрованих сигналів у ци х точках t i , та їх похибки визначення Dt i , а різницю часу розповсюдження сигналу від джерела до цих точок прийому O T = TPi + ti визначають, як Pi , та її похибку DTPi = Dt i , знову визначають координати джерела та їх похибки визначення, порівнюють величини цих похибок з відомими заданими значеннями. Якщо поточні похибки визначення координат джерела сигналу перевищують відомі задані значення, то починають наступний цикл уточнення координат джерела сигналу. Якщо ж поточні величини похибок визначення координат джерела сигналу не перевищують відомих заданих значень, то приймають рішення, що координати джерела сигналу визначені із з заданою точністю.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of passive location for detecting a quasiperiodic signal source
Назва патенту російськоюСпособ пассивной локации для обнаружения источника квазипериодического сигнала
МПК / Мітки
Мітки: квазіперіодичного, спосіб, сигналу, джерела, пасивної, локації
Код посилання
<a href="https://ua.patents.su/2-65808-sposib-pasivno-lokaci-dzherela-kvaziperiodichnogo-signalu.html" target="_blank" rel="follow" title="База патентів України">Спосіб пасивної локації джерела квазіперіодичного сигналу</a>
Спосіб визначення координат джерела радіовипромінювання в однобазовому вимірювальному комплексі
Номер патенту: 46388
Опубліковано: 15.05.2002
Автори: Худов Генадій Володимирович, Голкін Дмитро Васильович, Бутенко Ольга Станіславівна, Деденок Віктор Петрович, Березіна Світлана Іванівна
МПК: G01S 5/06
Мітки: координат, комплекси, радіовипромінювання, спосіб, визначення, однобазовому, вимірювальному, джерела
Формула / Реферат:
Спосіб визначення координат джерела радіовипромінювання в однобазовому вимірювальному комплексі, що полягає в тому, що приймачі радіовипромінювання розміщають у двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від того самого джерела радіовипромінювання до приймачів і запам'ятовують час виміру, який відрізняється тим, що шляхом розміщення одного з приймачів випромінювання на літальному апараті національної...
Спосіб просторової локації джерел дефектів, що розвиваються
Номер патенту: 36499
Опубліковано: 16.04.2001
Автори: Бабак Віталій Павлович, Філоненко Сергій Федорович
МПК: G01N 29/06, G01N 27/06
Мітки: розвиваються, локації, джерел, просторової, дефектів, спосіб
Текст:
...давачів: h, 1 - висота та довжина об'єкту контролю; Л, Л' - лінії напрямів на джерело випромінювання для першого та другого квадратів. Розрахунки показали, що похибка визначення місця знаходження джерела випромінювання не перевищує 7%. c2 t t +t t t 31 21 23 41 43 ; 4B t 32 - t 41 (1) X2 = c t (t + t ) - 2t 21t 41 t 42 31 23 41 4B t 34 - t 21 2 де c - швидкість звуку в матеріалі; B - базовий розмір антени (фіг. 1); t 21 , t 23 … - РЧП...
Спосіб визначення координат наземного джерела радіовипромінювання
Номер патенту: 43565
Опубліковано: 17.12.2001
Автори: Деденок Віктор Петрович, Березіна Світлана Іванівна, Бутенко Ольга Станіславівна, Голкін Дмитро Васильович, Худов Генадій Володимирович
МПК: G01S 5/06
Мітки: визначення, спосіб, джерела, радіовипромінювання, координат, наземного
Формула / Реферат:
Спосіб, визначення координат наземного джерела радіовипромінювання, який полягає в тому, що приймачі випромінювання встановлюють в двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від джерела випромінювання до приймачів і запам'ятовують час виміру, виміряне значення різниці дальностей використовують для індикації першого різницево-дальномірного пеленга, який відрізняється тим, що радіоприймачі випромінювання...
Пеленгатор для визначення кутових координат джерела імпульсного несинусоїдального сигналу
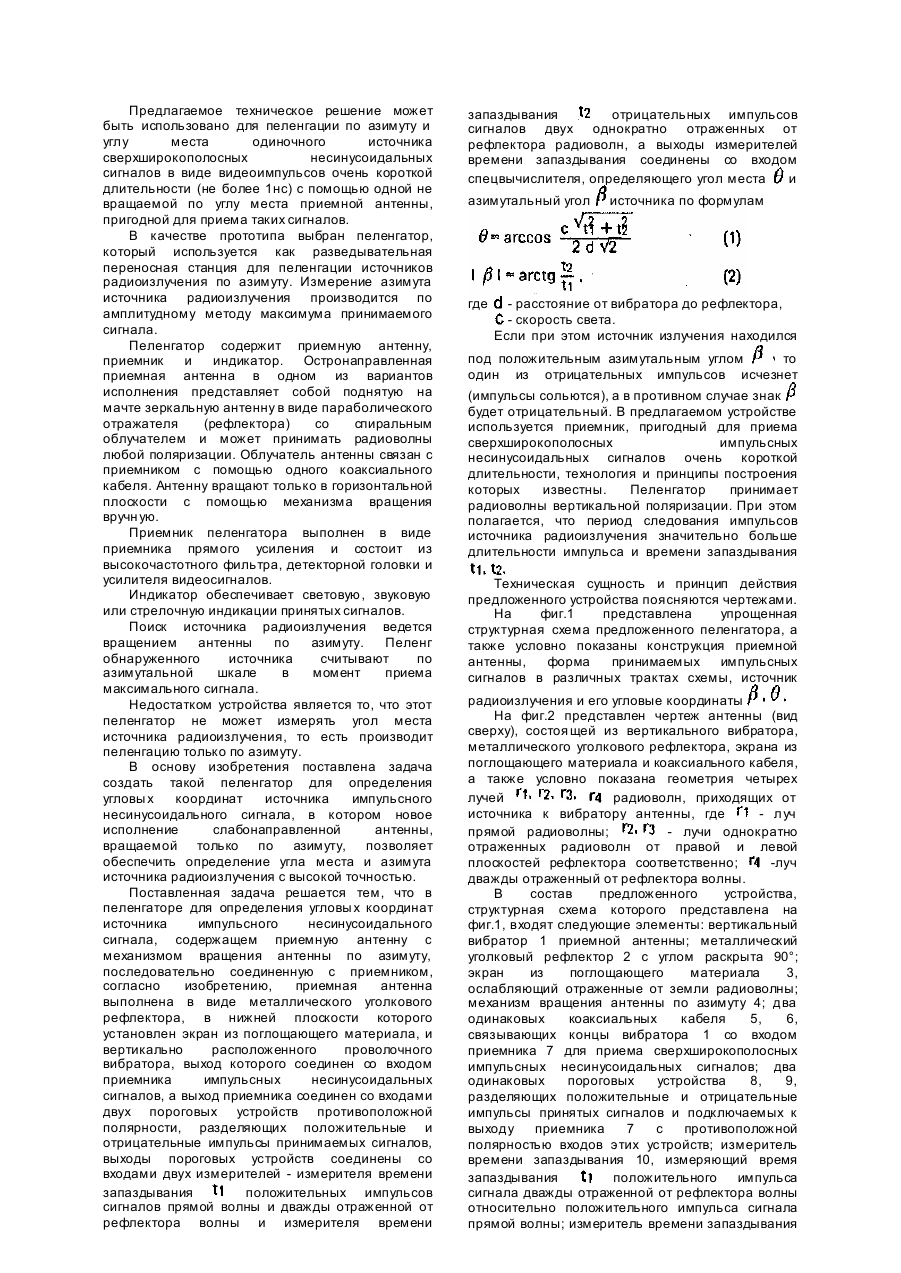
Номер патенту: 15412
Опубліковано: 30.06.1997
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Хом'яков Олег Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: імпульсного, несинусоїдального, джерела, координат, пеленгатор, кутових, визначення, сигналу
Формула / Реферат:
Пеленгатор для определения угловых координат источника импульсного несинусоидального сигнала, содержащий приемную антенну с механизмом вращения антенны по азимуту, последовательно соединенную с приемником, отличающийся тем, что приемная антенна выполнена в виде металлического уголкового рефлектора, в нижней плоскости которого установлен экран из поглощающего материала, и вертикально расположенного проволочного вибратора, выход которого...
Спосіб локації джерел випромінювання і пристрій для його реалізації
Номер патенту: 38212
Опубліковано: 17.03.2003
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: B25J 19/02, G01B 9/00
Мітки: джерел, спосіб, пристрій, локації, реалізації, випромінювання
Формула / Реферат:
1. Спосіб локації джерел випромінювання з застосуванням визначення кутів-пеленгів джерел випромінювання, з використанням оптичних елементів, який відрізняється тим, що визначають параметри зміщення потоку випромінювання джерел випромінювання при взаємодії з оптичними елементами, які потім використовують при визначенні координат джерел випромінювання.2. Спосіб за п. 1, який відрізняється тим, що визначення параметрів зміщення виконують...
Попередній патент: Система керування гальмами у випадку непритомного стану водія або ж коли він засинає за кермом “кажан”
Наступний патент: Спосіб пасивної звуколокації нестаціонарного джерела звуку
Випадковий патент: Препарат для профілактики гіпотиреозу та ендемічного зобу у великої рогатої худоби