Спосіб регулювання всережимним оптимальним регулятором
Формула / Реферат
Спосіб регулювання всережимним оптимальним регулятором зі скиданням попереджуючого впливу, згідно з яким підсилювач вводять в автоколивання, величина амплітуди яких менша від порога спрацьовування вихідного релейного елемента, який відрізняється тим, що автоколиваннями керують за допомогою вихідного сигналу підсилювача, який пропускають через елемент петльової нелінійності, та за допомогою швидкості зміни сигналу цього виходу шляхом включення виходу елемента петльової нелінійності між демпферними ланками, через які проходить негативний зворотний зв'язок з виходу релейного елемента регулятора на вхід регулятора, за допомогою позитивного зворотного зв’язку здійснюють керуючий вплив з попередженням, потім паузу до початку повернення вхідного імпульсу до нуля, потім виконують скидання попередження одним включенням вихідного реле без перерегулювання.
Текст
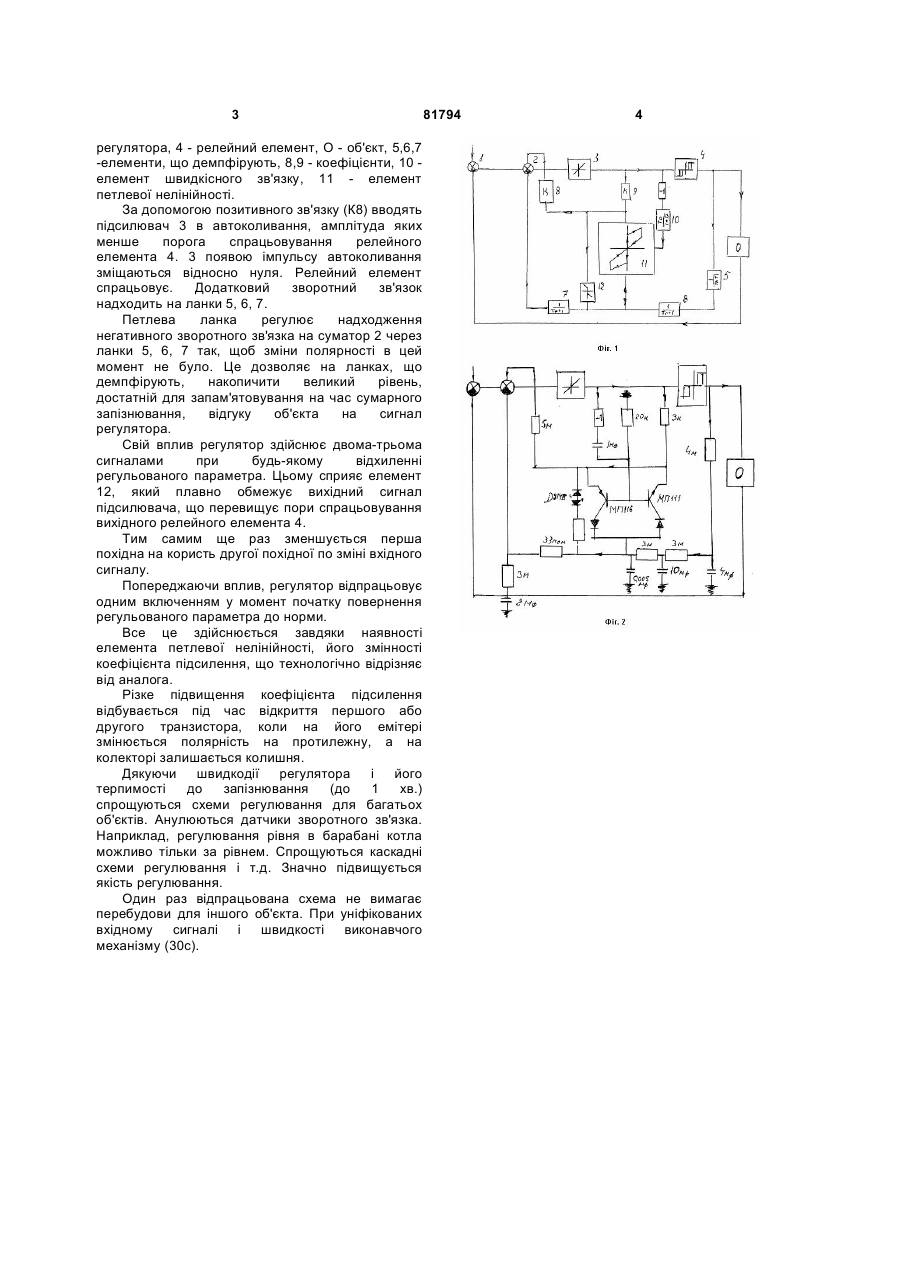
Спосіб регулювання всережимним оптимальним регулятором зі скиданням попереджуючого впливу, згідно з яким підсилювач вводять в автоколивання, величина амплітуди яких менша від порога спрацьовування вихідного 3 регулятора, 4 - релейний елемент, О - об'єкт, 5,6,7 -елементи, що демпфірують, 8,9 - коефіцієнти, 10 елемент швидкісного зв'язку, 11 - елемент петлевої нелінійності. За допомогою позитивного зв'язку (К8) вводять підсилювач 3 в автоколивання, амплітуда яких менше порога спрацьовування релейного елемента 4. 3 появою імпульсу автоколивання зміщаються відносно нуля. Релейний елемент спрацьовує. Додатковий зворотний зв'язок надходить на ланки 5, 6, 7. Петлева ланка регулює надходження негативного зворотного зв'язка на суматор 2 через ланки 5, 6, 7 так, щоб зміни полярності в цей момент не було. Це дозволяє на ланках, що демпфірують, накопичити великий рівень, достатній для запам'ятовування на час сумарного запізнювання, відгуку об'єкта на сигнал регулятора. Свій вплив регулятор здійснює двома-трьома сигналами при будь-якому відхиленні регульованого параметра. Цьому сприяє елемент 12, який плавно обмежує вихідний сигнал підсилювача, що перевищує пори спрацьовування вихідного релейного елемента 4. Тим самим ще раз зменшується перша похідна на користь другої похідної по зміні вхідного сигналу. Попереджаючи вплив, регулятор відпрацьовує одним включенням у момент початку повернення регульованого параметра до норми. Все це здійснюється завдяки наявності елемента петлевої нелінійності, його змінності коефіцієнта підсилення, що технологічно відрізняє від аналога. Різке підвищення коефіцієнта підсилення відбувається під час відкриття першого або другого транзистора, коли на його емітері змінюється полярність на протилежну, а на колекторі залишається колишня. Дякуючи швидкодії регулятора і його терпимості до запізнювання (до 1 хв.) спрощуються схеми регулювання для багатьох об'єктів. Анулюються датчики зворотного зв'язка. Наприклад, регулювання рівня в барабані котла можливо тільки за рівнем. Спрощуються каскадні схеми регулювання і т.д. Значно підвищується якість регулювання. Один раз відпрацьована схема не вимагає перебудови для іншого об'єкта. При уніфікованих вхідному сигналі і швидкості виконавчого механізму (30с). 81794 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of all-mode optimal controller
Автори англійськоюDorfman Eduard Borysovych, Dorfman Еduаrd Borysovych
Назва патенту російськоюСпособ регулировки всережимным оптимальным регулятором
Автори російськоюДорфман Эдуард Борисович
МПК / Мітки
МПК: G05B 11/00
Мітки: спосіб, всережимним, регулятором, оптимальним, регулювання
Код посилання
<a href="https://ua.patents.su/2-81794-sposib-regulyuvannya-vserezhimnim-optimalnim-regulyatorom.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання всережимним оптимальним регулятором</a>
Пристрій для регулювання вологості паперового полотна
Номер патенту: 26847
Опубліковано: 10.10.2007
Автори: Нарожний Віталій Васильович, Лобушин Олександр Олександрович, Бандура Іван Миколайович
МПК: G05D 22/00
Мітки: вологості, регулювання, пристрій, паперового, полотна
Формула / Реферат:
Пристрій для регулювання вологості паперового полотна, який складається з ланки регулювального каналу вологості, перший вхід якого зв'язаний з ланкою регулювального каналу тиску, до входу якого приєднаний регулювальний клапан, вхід якого електрично з'єднаний з регулятором тиску, перший вхід якого з'єднаний з блоком задання, а другий вхід з'єднаний з датчиком тиску, вхід якого з'єднаний з виходом ланки регулювального каналу тиску, а третій...
Дросель з регулятором
Номер патенту: 69053
Опубліковано: 16.08.2004
Автори: Роганов Лев Леонідович, Корчак Олена Сергіївна
МПК: F16K 47/00
Мітки: регулятором, дросель
Формула / Реферат:
Дросель з регулятором, що містить порожнистий корпус з герметичною кришкою, вхідним і вихідним каналами, пружний елемент із наскрізним каналом, який розміщений у корпусі, систему регулювання прохідного перерізу каналу пружного елемента у вигляді штовхача і керуючого силового пристрою, взаємодіючого зі штовхачем, який відрізняється тим, що дроселюючий і регулюючий елементи виконано у вигляді кручених пружин розтягання-стиску, а керування...
Пристрій автоматичного керування регулятором напруги
Номер патенту: 37686
Опубліковано: 15.05.2001
Автори: Трунова Ірина Михайлівна, Савченко Петро Ілліч, Фурман Ілля Олександрович, Ремез Віталій Віталійович
МПК: H02M 5/02
Мітки: пристрій, керування, автоматичного, напруги, регулятором
Текст:
...Сигнал Yij є і вхідним сигналом, що вводиться в мікроконтролер 6 для визначення відповідного заданого оптимального значення напруги живлення електрообладнання даного типового варіанту одночасної його експлуатації, тобто: Yij=Xij. В мікроконтролері 6 здійснюється порівняння значення напруги Uвх на вході регулятора напруги 1 з оптимальним значенням для даного типового варіанту одночасної експлуатації електрообладнання Uопт і з...
Пристрій управління регулятором
Номер патенту: 876
Опубліковано: 16.07.2001
Автори: Михайловський Владлен Анатолійович, Кузнецов Борис Олексійович, Садило Анатолій Олексійович
МПК: A01B 63/111
Мітки: регулятором, управління, пристрій
Формула / Реферат:
1. Пристрій управління регулятором, що містить сектор з контактною поверхнею і закріплену на осі сектора, рукоятку управління з установленим на ній за допомогою кріпильного елемента робочим органом, взаємодіючим з контактною поверхнею сектора, який відрізняється тим, що на секторі установлений упор, а робочий орган виконаний у вигляді підпружиненого кулачка, установленного з можливістю взаємодії з упором, причому у зоні кулачка розташований...
Пристрій регулювання вологості паперового полотна

Номер патенту: 59784
Опубліковано: 15.09.2003
Автори: Радек Ростислав Павлович, Марків Денис Васильович, Кріль Андрій Анатолієвич, Семчишин Петро Йосипович, Телєтков Олександр Васильович, Винницький Володимир Миколайович, Ярош Михайло Васильович
МПК: G05D 22/00
Мітки: пристрій, регулювання, полотна, вологості, паперового
Формула / Реферат:
Пристрій регулювання вологості паперового полотна, який складається з ланки регулювального каналу вологості, перший вхід якої зв’язаний з ланкою регулювального каналу тиску, до входу якого приєднаний регулювальний клапан, вхід якого електрично з’єднаний з регулятором тиску, перший вхід якого з’єднаний з блоком задання, а другий вхід з’єднаний з датчиком тиску, вхід якого з’єднаний з виходом ланки регулювального каналу тиску, а третій вхід...
Попередній патент: Спосіб та установка для термічної обробки твердих матеріалів, що містять оксид заліза
Наступний патент: Фармацевтична композиція, що містить амінопохідну 2,3-дигідрофталазин-1,4-діону, та спосіб корекції імунної системи організму
Випадковий патент: Спосіб прогнозування результатів лікування хронічної серцевої недостатності