Керований фазообертач
Формула / Реферат
Керований фазообертач, що містить суматори і блок множення, який відрізняється тим, що містить блок затримки, а входом пристрою є вхід першого суматора, вихід якого і вхід керуючої дії сполучений з входом блока множення, а вихід блока множення сполучений з першим входом другого суматора, вихід другого суматора сполучений з двома входами третього суматора і входом блока затримки, вихід блока затримки сполучений з другим входом другого суматора і інверсним входом першого суматора, причому вихід третього суматора, інверсний вхід якого сполучений з входом пристрою, є виходом фазообертача.
Текст
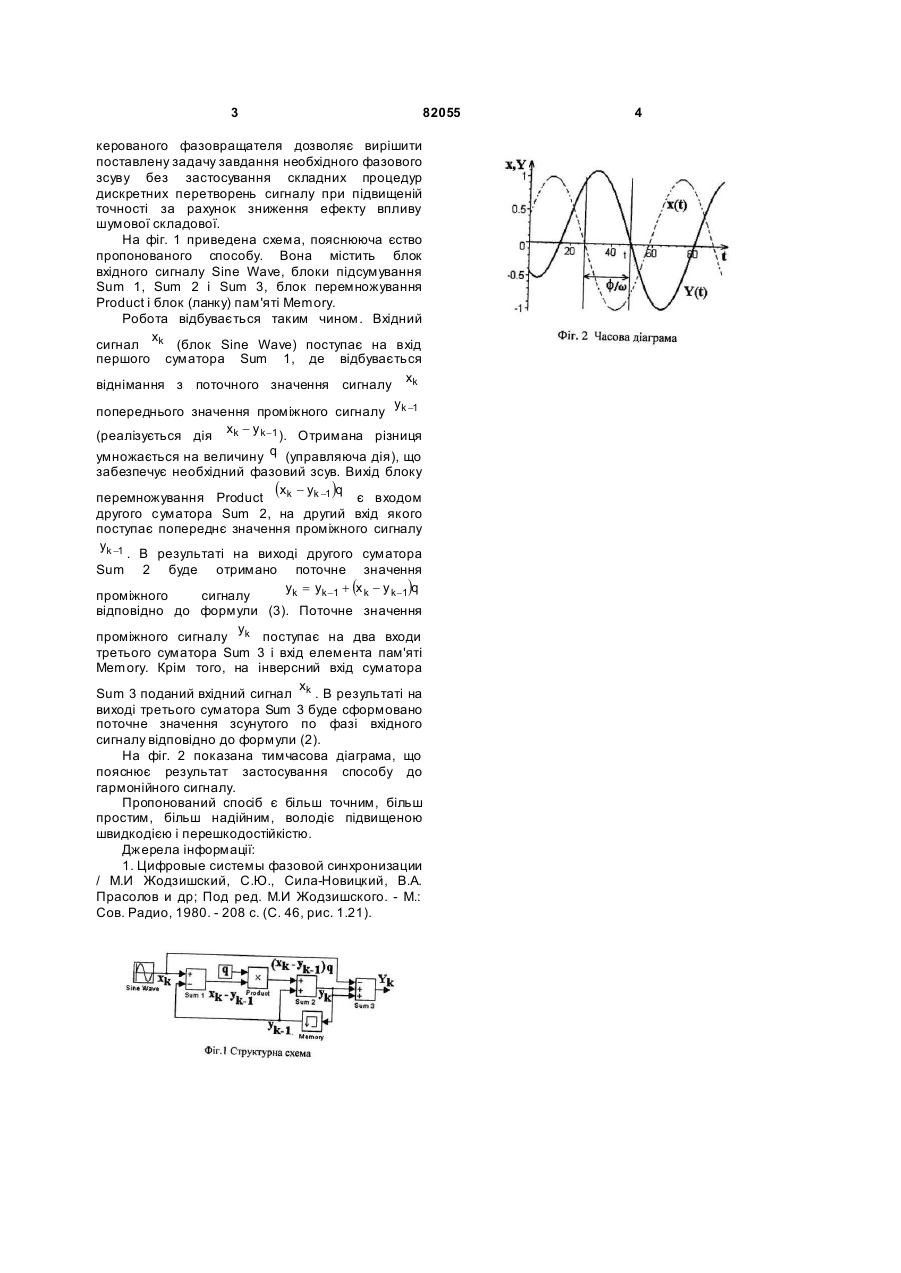
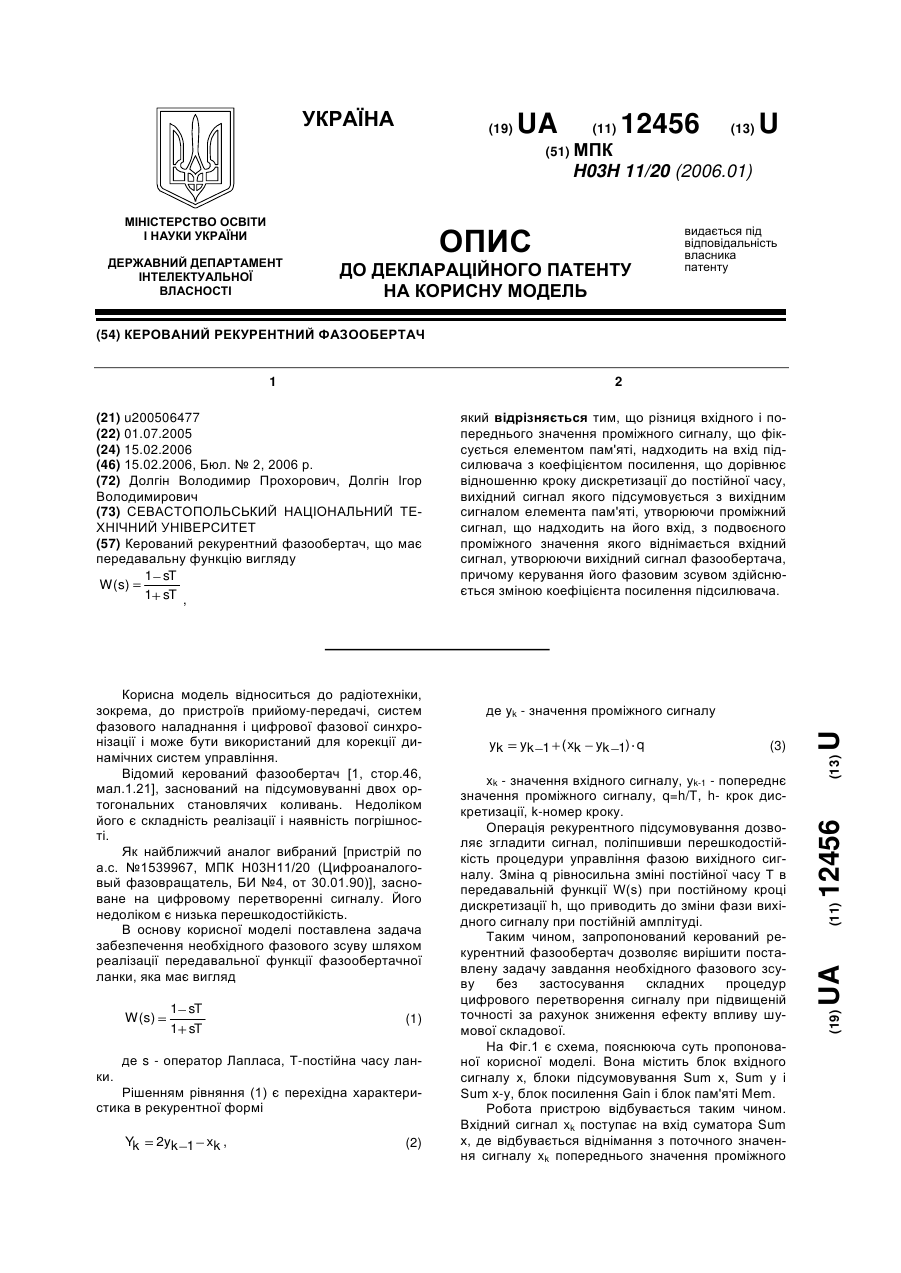
Керований фазообертач, що містить суматори і блок множення, який відрізняється тим, що містить блок затримки, а входом пристрою є вхід першого суматора, вихід якого і вхід керуючої дії сполучений з входом блока множення, а вихід блока множення сполучений з першим входом другого суматора, вихід друго го суматора сполучений з двома входами третього суматора і входом блока затримки, вихід блока затримки сполучений з другим входом другого суматора і інверсним входом першого суматора, причому вихід третього суматора, інверсний вхід якого сполучений з входом пристрою, є виходом фазообертача. Винахід відноситься до області радіотехніки і може бути використаний в пристроях прийомупередачі, а також в автоматичних системах фазової автопідстройки і цифрової фазової синхронізації. Відомий спосіб синтезу керованого фазовращателя [1, cтop. 46, фіг. 1.21], заснований на підсумовуванні двох ортогональних становлячих коливань. Недоліком його є складність реалізації і наявність похибки. Як прототип вибраний спосіб по а.с. №1539967, МКИ Н03Н11/20 (Цифроаналоговый фазовращатель, БИ №4, от 30.01.90). Його недоліком є низька перешкодостійкість. В основу винаходу встановлена задача забезпечення необхідного фазового зсуву шляхом реалізації передавальної функції ідеальної фазовращательної ланки. Передавальна функція фазовращательної ланки має вигляд 1 - sT (1) W (s ) = 1 + sT де s - оператор Лапласа, T - постійна часу фазовращательної ланки. Рекурентний вираз для обчислення реакції можна одержати, подаючи передавальну функцію (1) в тотожній формі 2 W (s ) = -1 1 + sT . Рішенням рівняння є характеристика в рекурентної формі Yk = 2yk - x k - значення вхідного сигналу на k-м q = h / T , h - крок дискретизації. кроці, Операція рекурентного підсумування дозволяє згладити сигнал, поліпшуючи перешкодостійкість процедури управління фазою вихідного сигналу. Зміна q рівносильна зміні постійної часу T в передавальній функції W (s ) фазовращателю при постійному кроці квантування (дискретизація) h, що приводить до зміни фази вихідного сигналу при постійній амплітуді. Фазовий зсув вихідного сигналу yk щодо вхідного xk визначиться як ì æ - 2wT ö ÷, ï arctan ç i f 1 p wT; ç 1- (w T )2 ÷ ï è ø f=í æ - 2wT ö ï ç ÷ - p i f 1 ³ w T. ïarctan ç 2÷ è 1- (wT ) ø î Таким чином, запропонований спосіб синтезу (13) 82055 xk (11) де UA y де k - значення проміжного сигналу, що є результатом приватного рішення для інерційної ланки yk = y k-1 + (xk - yk -1 )× q (3 (19) (2 C2 перехідна 3 82055 керованого фазовращателя дозволяє вирішити поставлену задачу завдання необхідного фазового зсуву без застосування складних процедур дискретних перетворень сигналу при підвищеній точності за рахунок зниження ефекту впливу шумової складової. На фіг. 1 приведена схема, пояснююча єство пропонованого способу. Вона містить блок вхідного сигналу Sine Wave, блоки підсумування Sum 1, Sum 2 і Sum 3, блок перемножування Product і блок (ланку) пам'яті Memory. Робота відбувається таким чином. Вхідний x сигнал k (блок Sine Wave) поступає на вхід першого суматора Sum 1, де відбувається xk віднімання з поточного значення сигналу y попереднього значення проміжного сигналу k -1 xk - y k-1 (реалізується дія ). Отримана різниця q (управляюча дія), що умножається на величину забезпечує необхідний фазовий зсув. Вихід блоку (xk - yk -1 )q є входом перемножування Product другого суматора Sum 2, на другий вхід якого поступає попереднє значення проміжного сигналу yk -1 . В результаті на виході другого суматора Sum 2 буде отримано поточне значення = yk-1 + (x k - y k-1)q yk проміжного сигналу відповідно до формули (3). Поточне значення y проміжного сигналу k поступає на два входи третього суматора Sum 3 і вхід елемента пам'яті Memory. Крім того, на інверсний вхід суматора x Sum 3 поданий вхідний сигнал k . В результаті на виході третього суматора Sum 3 буде сформовано поточне значення зсунутого по фазі вхідного сигналу відповідно до формули (2). На фіг. 2 показана тимчасова діаграма, що пояснює результат застосування способу до гармонійного сигналу. Пропонований спосіб є більш точним, більш простим, більш надійним, володіє підвищеною швидкодією і перешкодостійкістю. Джерела інформації: 1. Цифровые системы фазовой синхронизации / М.И Жодзишский, C.Ю., Сила-Новицкий, В.А. Прасолов и др; Под ред. М.И Жодзишского. - М.: Сов. Радио, 1980. - 208 с. (С. 46, рис. 1.21). 4
ДивитисяДодаткова інформація
Назва патенту англійськоюControlled phase inverter
Автори англійськоюDolhin Volodymyr Prohorovych
Назва патенту російськоюУправляемый фазовращатель
Автори російськоюДолгин Владимир Прохорович
МПК / Мітки
МПК: H03H 11/02
Мітки: керований, фазообертач
Код посилання
<a href="https://ua.patents.su/2-82055-kerovanijj-fazoobertach.html" target="_blank" rel="follow" title="База патентів України">Керований фазообертач</a>
Керований фазообертач
Номер патенту: 12457
Опубліковано: 15.02.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03H 11/02
Мітки: фазообертач, керований
Формула / Реферат:
Керований фазообертач, що містить суматори і блок пам'яті, який відрізняється тим, що на вхід суматора 1 поступає вхідний сигнал і інверсний вихідний сигнал блока пам'яті 5, вихід суматора 1 з'єднаний з входом підсилювача 4 з коефіцієнтом посилення h/T, де h - крок дискретизації, вихід підсилювача 4 з'єднаний з входом суматора 2, другий вхід якого з'єднаний з виходом блока пам'яті 5, вихід суматора 2 з'єднаний з двома входами суматора 3 і...
Керований рекурентний фазообертач
Номер патенту: 12456
Опубліковано: 15.02.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03H 11/02
Мітки: керований, фазообертач, рекурентний
Формула / Реферат:
Керований рекурентний фазообертач, що має передавальну функцію вигляду,який відрізняється тим, що різниця вхідного і попереднього значення проміжного сигналу, що фіксується елементом пам'яті, надходить на вхід підсилювача з коефіцієнтом посилення, що дорівнює відношенню кроку дискретизації до постійної часу, вихідний сигнал якого підсумовується з вихідним...
Цифро-аналоговий фазообертач
Номер патенту: 16431
Опубліковано: 15.08.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03H 11/02
Мітки: цифро-аналоговий, фазообертач
Формула / Реферат:
Цифроаналоговий фазообертач, що містить суматори, підсилювачі і елемент затримки, який відрізняється тим, що вхідний сигнал x поступає на вхід вхідного диференціального підсилювача 1, вихід якого пов'язаний з входом операційного підсилювача 2 і інверсним входом вихідного диференціального підсилювача 5, вихід операційного підсилювача 2 сполучений з входом суматора 3, вихід суматора 3 пов'язаний з входом вихідного диференціального підсилювача 5...
Фазообертач

Номер патенту: 16432
Опубліковано: 15.08.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03H 11/02
Мітки: фазообертач
Формула / Реферат:
Фазообертач, що містить суматор, помножувач і підсилювачі, який відрізняється тим, що вхідний сигнал х надходить на вхід вхідного диференціального підсилювача 1, вихід якого пов'язаний з входом помножувача 2 і інверсним входом вихідного диференціального підсилювача 5, на другий вхід помножувача 2 поданий сигнал корекції q, вихід якого сполучений з входом суматора 3, вихід суматора 3 пов'язаний з входом вихідного диференціального підсилювача 5...
Коректор

Номер патенту: 12454
Опубліковано: 15.02.2006
Автори: Долгін Ігор Володимирович, Долгін Володимир Прохорович
МПК: H03H 11/02
Мітки: коректор
Формула / Реферат:
Коректор, що містить суматори і блок затримки, який відрізняється тим, що введений диференціальний підсилювач 1, на який надходить вхідний сигнал, а на його інверсний вхід - сигнал блока затримки 4, вихід диференціального підсилювача 1 сполучений з входом суматора 2, другий вхід якого сполучений з виходом блока затримки 4, вихід суматора 2 сполучений з двома входами суматора 3 і входом блока затримки 4, на інверсний вхід суматора 3 поданий...