Пристрій gps-визначення координат рухомого об’єкта
Номер патенту: 82795
Опубліковано: 12.05.2008
Автори: Надточій Олександр Володимирович, Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Боровий Валентин Олександрович
Формула / Реферат
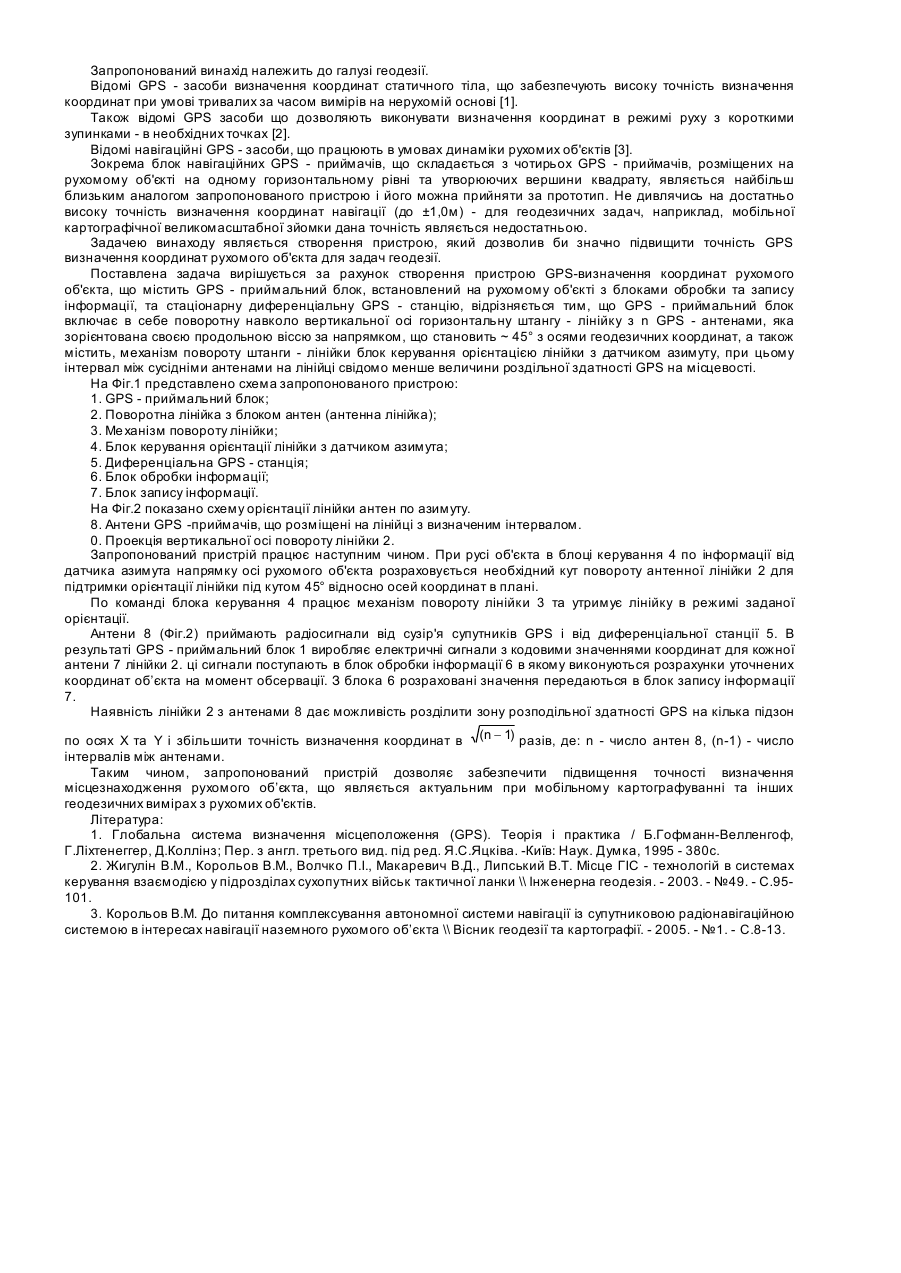
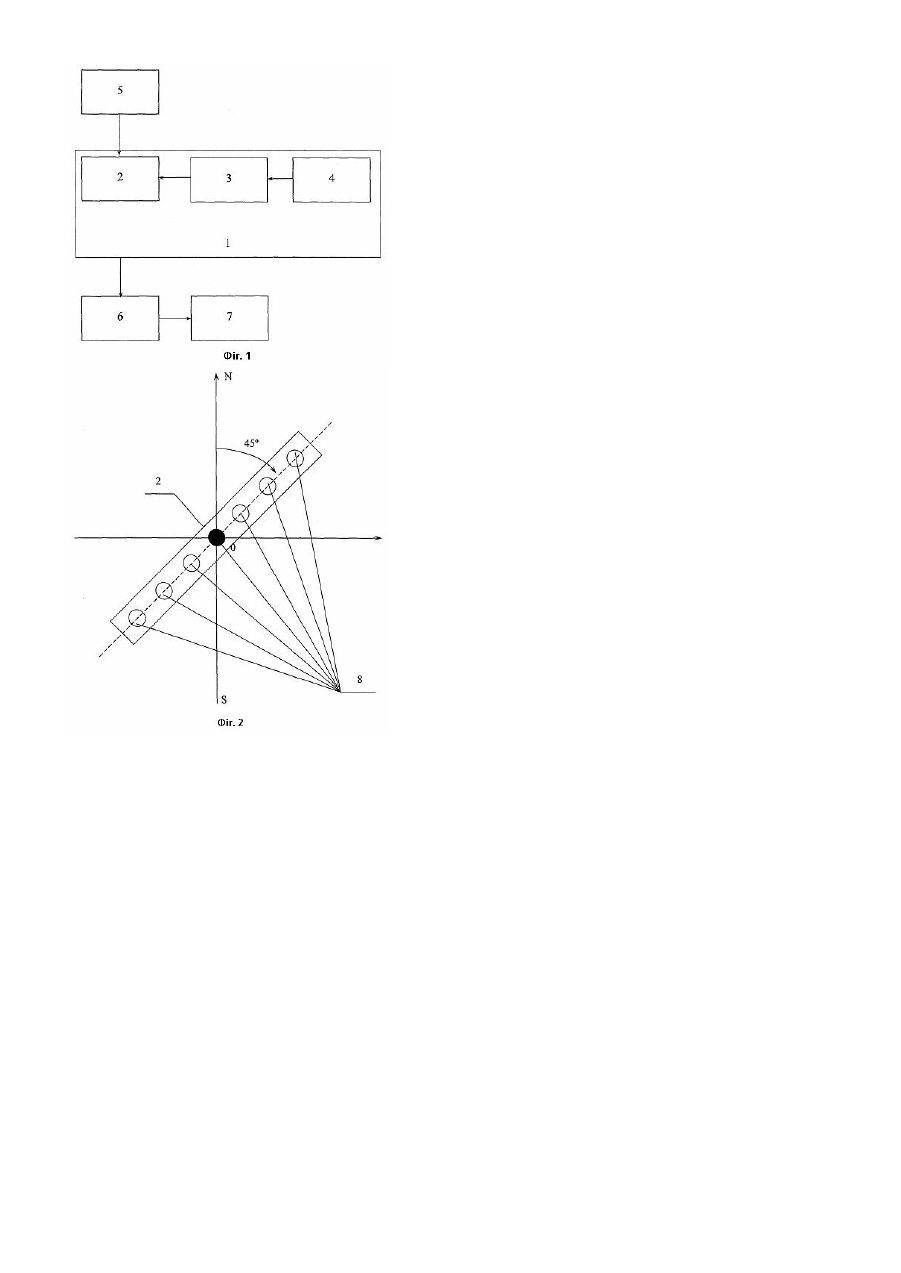
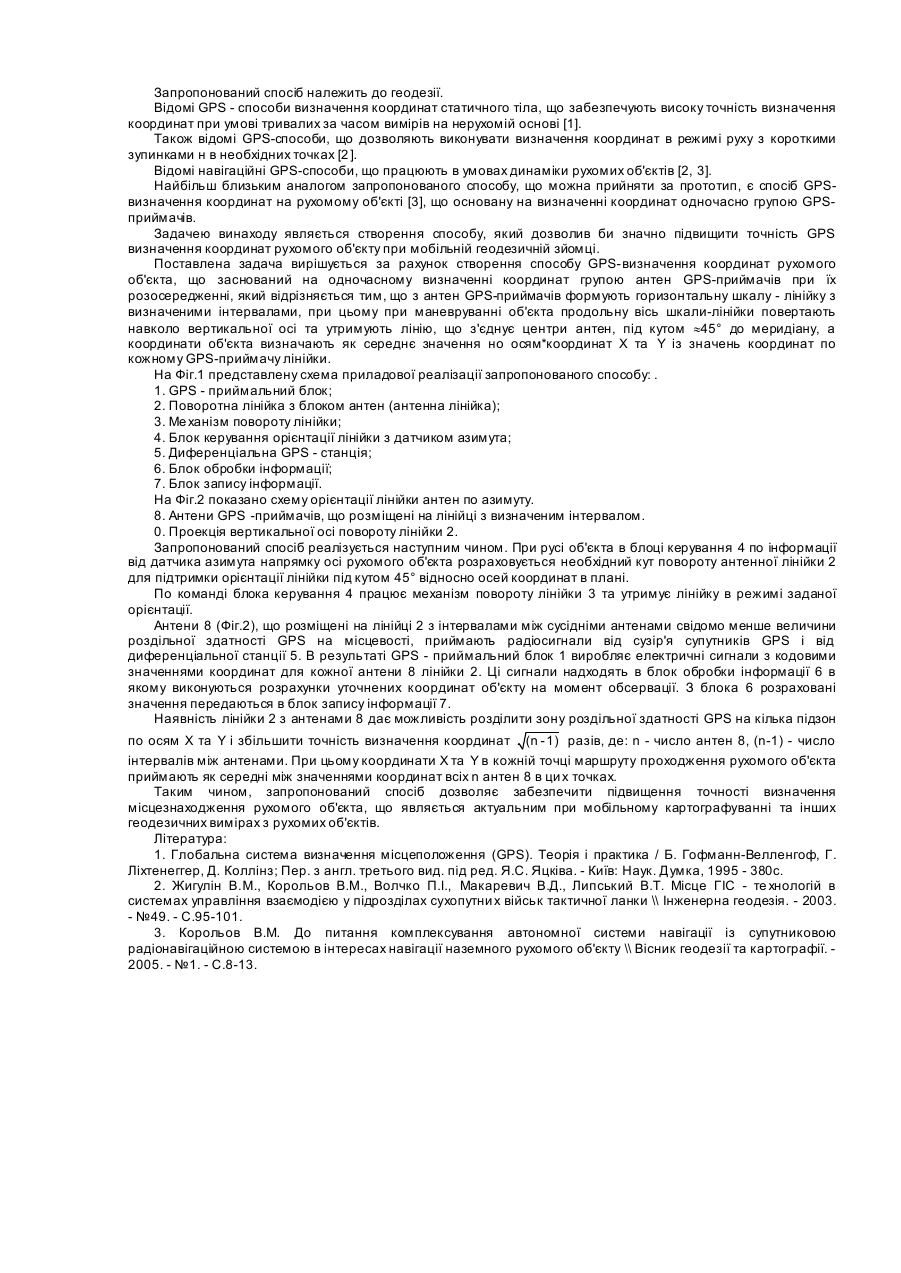
Пристрій для GPS-визначення координат рухомого об'єкта, що містить GPS-приймальний блок, встановлений на рухомому об'єкті з блоками обробки та запису інформації, та стаціонарну диференціальну GPS-станцію, який відрізняється тим, що GPS-приймальний блок включає в себе поворотну навколо вертикальної осі горизонтальну штангу-лінійку з n GPS-антенами, яка зорієнтована своєю поздовжньою віссю за напрямком, що становить ~ 45° з осями геодезичних координат, а також механізм повороту штанги-лінійки і блок керування орієнтацією лінійки з датчиком азимута, при цьому інтервал між сусідніми антенами на лінійці свідомо менше величини роздільної здатності GPS на місцевості.
Текст
Запропонований винахід належить до галузі геодезії. Відомі GPS - засоби визначення координат статичного тіла, що забезпечують високу точність визначення координат при умові тривалих за часом вимірів на нерухомій основі [1]. Також відомі GPS засоби що дозволяють виконувати визначення координат в режимі руху з короткими зупинками - в необхідних точках [2]. Відомі навігаційні GPS - засоби, що працюють в умовах динаміки рухомих об'єктів [3]. Зокрема блок навігаційних GPS - приймачів, що складається з чотирьох GPS - приймачів, розміщених на рухомому об'єкті на одному горизонтальному рівні та утворюючих вершини квадрату, являється найбільш близьким аналогом запропонованого пристрою і його можна прийняти за прототип. Не дивлячись на достатньо високу точність визначення координат навігації (до ±1,0м) - для геодезичних задач, наприклад, мобільної картографічної великомасштабної зйомки дана точність являється недостатньою. Задачею винаходу являється створення пристрою, який дозволив би значно підвищити точність GPS визначення координат рухомого об'єкта для задач геодезії. Поставлена задача вирішується за рахунок створення пристрою GPS-визначення координат рухомого об'єкта, що містить GPS - приймальний блок, встановлений на рухомому об'єкті з блоками обробки та запису інформації, та стаціонарну диференціальну GPS - станцію, відрізняється тим, що GPS - приймальний блок включає в себе поворотну навколо вертикальної осі горизонтальну штангу - лінійку з n GPS - антенами, яка зорієнтована своєю продольною віссю за напрямком, що становить ~ 45° з осями геодезичних координат, а також містить, механізм повороту штанги - лінійки блок керування орієнтацією лінійки з датчиком азимуту, при цьому інтервал між сусідніми антенами на лінійці свідомо менше величини роздільної здатності GPS на місцевості. На Фіг.1 представлено схема запропонованого пристрою: 1. GPS - приймальний блок; 2. Поворотна лінійка з блоком антен (антенна лінійка); 3. Ме ханізм повороту лінійки; 4. Блок керування орієнтації лінійки з датчиком азимута; 5. Диференціальна GPS - станція; 6. Блок обробки інформації; 7. Блок запису інформації. На Фіг.2 показано схему орієнтації лінійки антен по азимуту. 8. Антени GPS -приймачів, що розміщені на лінійці з визначеним інтервалом. 0. Проекція вертикальної осі повороту лінійки 2. Запропонований пристрій працює наступним чином. При русі об'єкта в блоці керування 4 по інформації від датчика азимута напрямку осі рухомого об'єкта розраховується необхідний кут повороту антенної лінійки 2 для підтримки орієнтації лінійки під кутом 45° відносно осей координат в плані. По команді блока керування 4 працює механізм повороту лінійки 3 та утримує лінійку в режимі заданої орієнтації. Антени 8 (Фіг.2) приймають радіосигнали від сузір'я супутників GPS і від диференціальної станції 5. В результаті GPS - приймальний блок 1 виробляє електричні сигнали з кодовими значеннями координат для кожної антени 7 лінійки 2. ці сигнали поступають в блок обробки інформації 6 в якому виконуються розрахунки уточнених координат об’єкта на момент обсервації. З блока 6 розраховані значення передаються в блок запису інформації 7. Наявність лінійки 2 з антенами 8 дає можливість розділити зону розподільної здатності GPS на кілька підзон по осях Х та Y і збільшити точність визначення координат в (n - 1) разів, де: n - число антен 8, (n-1) - число інтервалів між антенами. Таким чином, запропонований пристрій дозволяє забезпечити підвищення точності визначення місцезнаходження рухомого об’єкта, що являється актуальним при мобільному картографуванні та інших геодезичних вимірах з рухомих об'єктів. Література: 1. Глобальна система визначення місцеположення (GPS). Теорія і практика / Б.Гофманн-Велленгоф, Г.Ліхтенеггер, Д.Коллінз; Пер. з англ. третього вид. під ред. Я.С.Яцківа. -Київ: Наук. Думка, 1995 - 380с. 2. Жигулін В.М., Корольов В.М., Волчко П.І., Макаревич В.Д., Липський В.Т. Місце ГІС - технологій в системах керування взаємодією у підрозділах сухопутних військ тактичної ланки \\ Інженерна геодезія. - 2003. - №49. - С.95101. 3. Корольов В.М. До питання комплексування автономної системи навігації із супутниковою радіонавігаційною системою в інтересах навігації наземного рухомого об’єкта \\ Вісник геодезії та картографії. - 2005. - №1. - С.8-13.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for gps-determination of coordinates of movable object
Автори англійськоюBorovyi Valentyn Oleksandrovych, Burachek Vsevolod Hermanovych, Mamontova Liudmyla Stepanivna, Nadtochii Oleksandr Volodymyrovych
Назва патенту російськоюУстройство gps-определения координат подвижного объекта
Автори російськоюБоровый Валентин Александрович, Бурачек Вселовод Германович, Мамонтова Людмила Степановна, Надточий Александр Владимирович
МПК / Мітки
МПК: G01B 7/004
Мітки: об'єкта, рухомого, координат, пристрій, gps-визначення
Код посилання
<a href="https://ua.patents.su/2-82795-pristrijj-gps-viznachennya-koordinat-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій gps-визначення координат рухомого об’єкта</a>
Спосіб gps-визначення координат рухомого об’єкта
Номер патенту: 82794
Опубліковано: 12.05.2008
Автори: Надточій Олександр Володимирович, Бурачек Всеволод Германович, Боровий Валентин Олександрович, Мамонтова Людмила Степанівна
МПК: G01B 7/004
Мітки: об'єкта, спосіб, рухомого, координат, gps-визначення
Формула / Реферат:
Спосіб GPS-визначення координат рухомого об'єкта, що заснований на одночасному визначенні координат групою антен GPS-приймачів при їх розосередженні, який відрізняється тим, що з антен GPS-приймачів формують горизонтальну шкалу-лінійку з визначеними інтервалами, при цьому при маневруванні об'єкта поздовжню вісь шкали-лінійки повертають навколовертикальної осі та утримують лінію, що з'єднує центри антен, під кутом
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Кравченко Юрій Васильович, Савченко Віталій Анатолійович, Машков Олег Альбертович, Мосов Сергій Петрович
МПК: G01S 5/02
Мітки: об'єкта, швидкості, визначення, координат, рухомого, система
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Пристрій для визначення координат рухомого випромінюючого об’єкта
Номер патенту: 46245
Опубліковано: 15.11.2004
Автори: Остапов Анатолій Олександрович, Радченко Октябрина Антонівна, Стеріополо Євген Анатолійович, Чигирин Олег Трохимович, Тітов Валерій Сергійович
Мітки: визначення, випромінюючого, об'єкта, рухомого, пристрій, координат
Формула / Реферат:
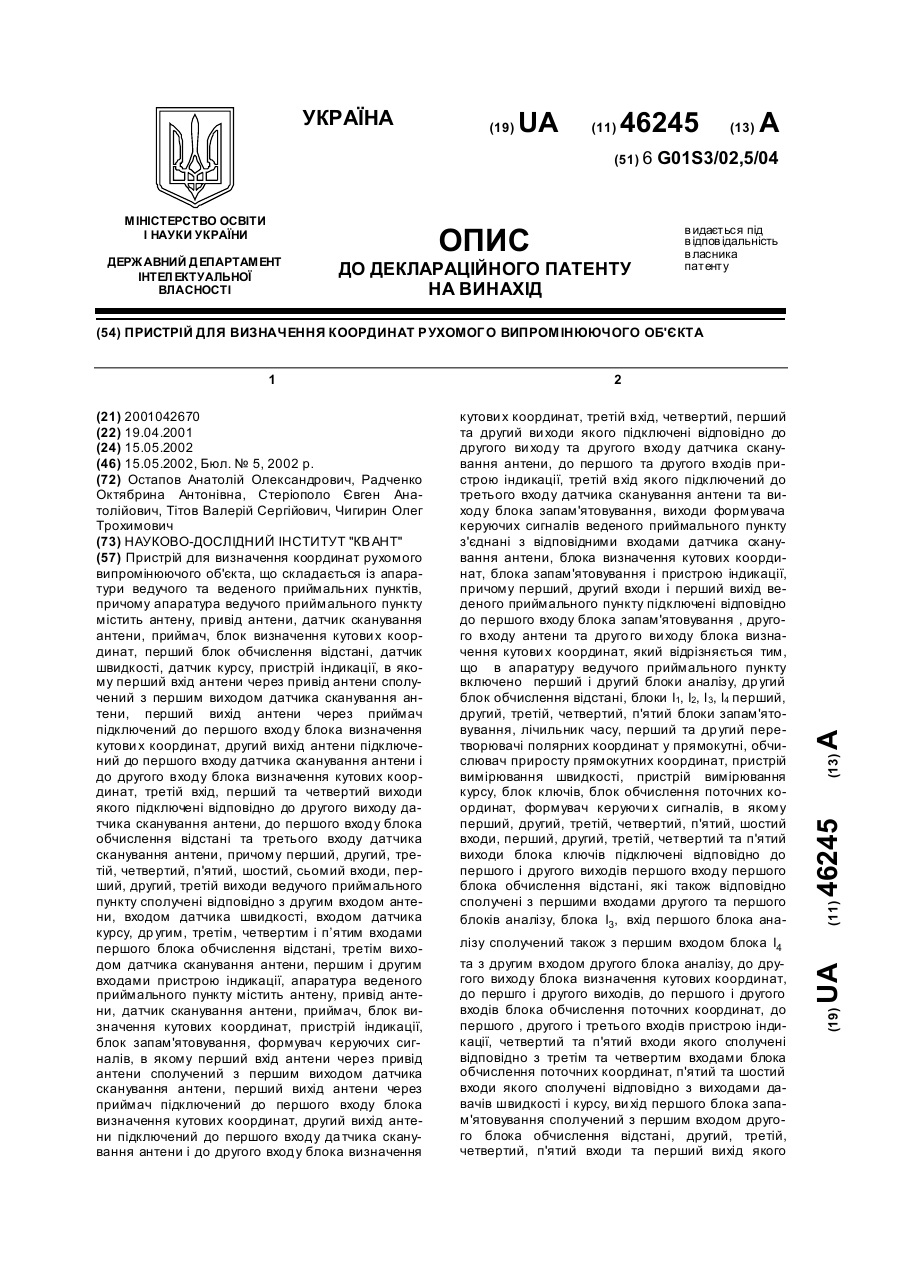
Пристрій для визначення координат рухомого випромінюючого об'єкта, що складається із апаратури ведучого та веденого приймальних пунктів, причому апаратура ведучого приймального пункту містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, перший блок обчислення відстані, датчик швидкості, датчик курсу, пристрій індикації, в якому перший вхід антени через привід антени сполучений з першим виходом...
Пристрій для визначення координат тривимірної криволінійної поверхні об`єкта
Номер патенту: 25633
Опубліковано: 10.08.2007
Автори: Астанін В'ячеслав Валентинович, Олефір Ганна Олексіївна
МПК: G01B 5/30
Мітки: поверхні, координат, пристрій, визначення, об'єкта, тривимірної, криволінійної
Формула / Реферат:
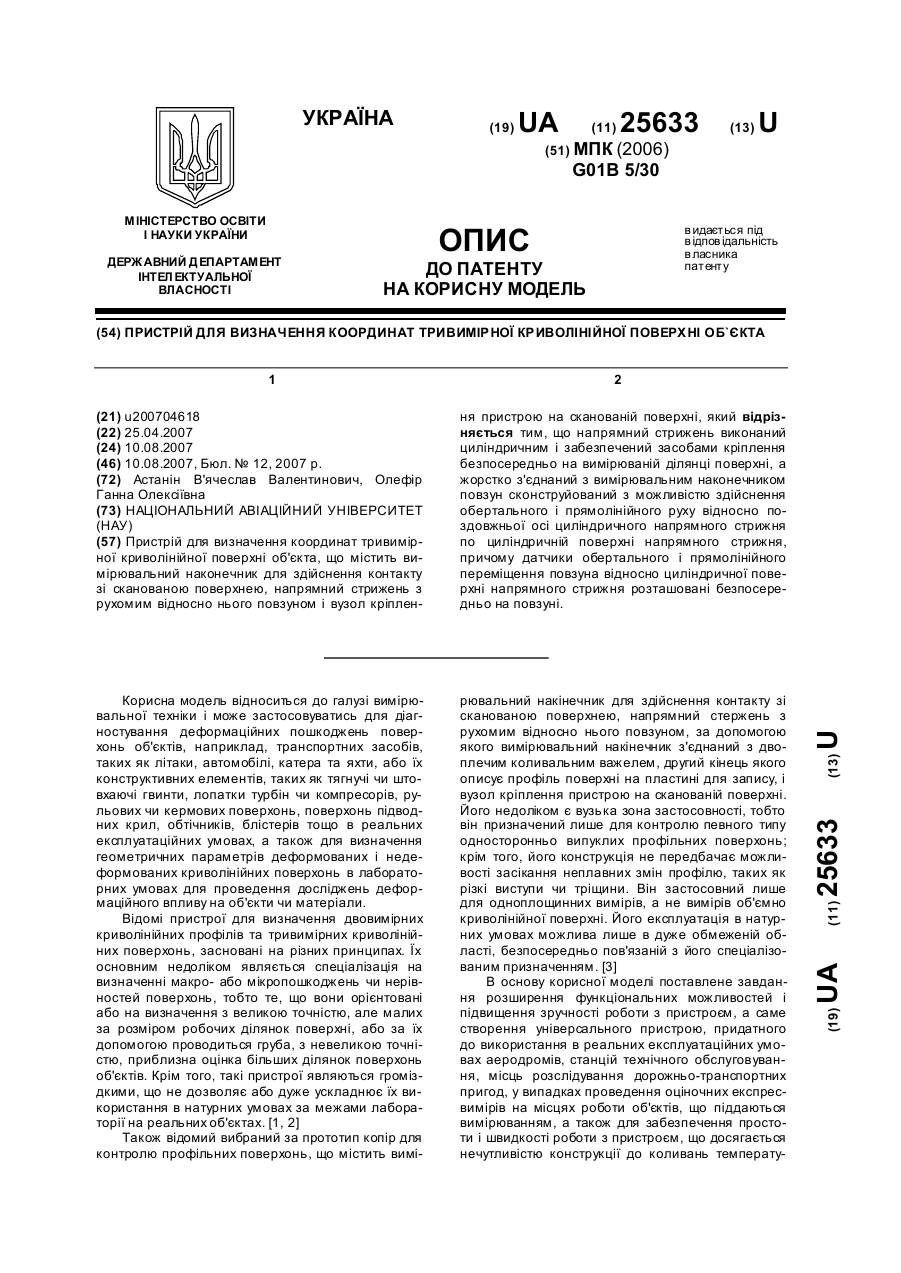
Пристрій для визначення координат тривимірної криволінійної поверхні об'єкта, що містить вимірювальний наконечник для здійснення контакту зі сканованою поверхнею, напрямний стрижень з рухомим відносно нього повзуном і вузол кріплення пристрою на сканованій поверхні, який відрізняється тим, що напрямний стрижень виконаний циліндричним і забезпечений засобами кріплення безпосередньо на вимірюваній ділянці поверхні, а жорстко з'єднаний з...
Пристрій для визначення координат енергетичного центру зображення світлової плями
Номер патенту: 28111
Опубліковано: 26.11.2007
Автори: Білинський Йосип Йосипович, Кухарчук Василь Васильович, Білинський Володимир Йосипович
МПК: G06K 9/46
Мітки: плями, центру, визначення, пристрій, координат, енергетичного, зображення, світлової
Формула / Реферат:
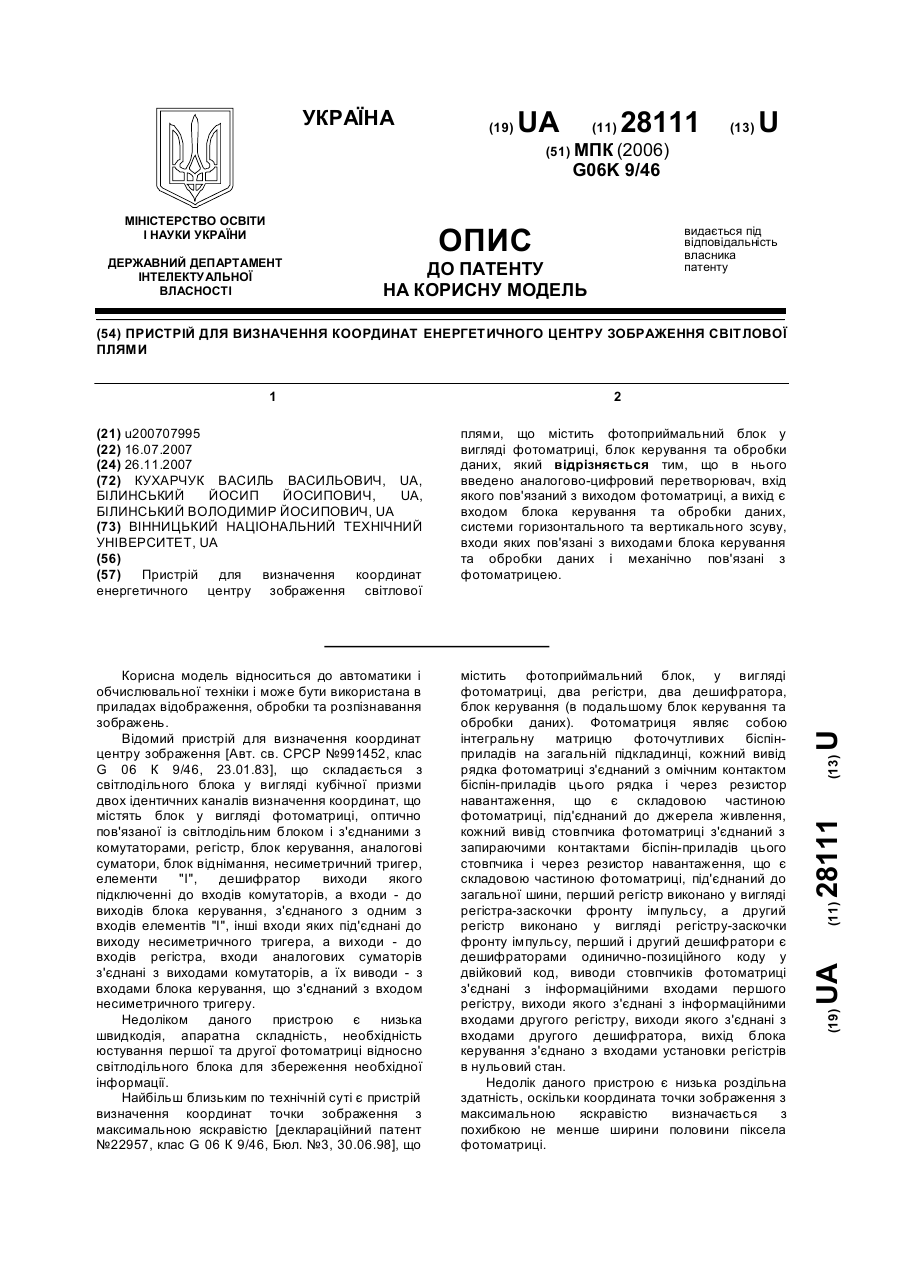
Пристрій для визначення координат енергетичного центру зображення світлової плями, що містить фотоприймальний блок у вигляді фотоматриці, блок керування та обробки даних, який відрізняється тим, що в нього введено аналогово-цифровий перетворювач, вхід якого пов'язаний з виходом фотоматриці, а вихід є входом блока керування та обробки даних, системи горизонтального та вертикального зсуву, входи яких пов'язані з виходами блока керування та...
Попередній патент: Спосіб gps-визначення координат рухомого об’єкта
Наступний патент: Триконусний завантажувальний пристрій доменної печі тарасова
Випадковий патент: Спосіб моделювання хронічного деструктивного періодонтиту у лабораторних тварин (щурів)