Спосіб gps-визначення координат рухомого об’єкта
Номер патенту: 82794
Опубліковано: 12.05.2008
Автори: Мамонтова Людмила Степанівна, Надточій Олександр Володимирович, Бурачек Всеволод Германович, Боровий Валентин Олександрович
Формула / Реферат
Спосіб GPS-визначення координат рухомого об'єкта, що заснований на одночасному визначенні координат групою антен GPS-приймачів при їх розосередженні, який відрізняється тим, що з антен GPS-приймачів формують горизонтальну шкалу-лінійку з визначеними інтервалами, при цьому при маневруванні об'єкта поздовжню вісь шкали-лінійки повертають навколовертикальної осі та утримують лінію, що з'єднує центри антен, під кутом ![]() 45° до меридіана, а координати об'єкта визначають як середнє значення за осями координат Х та Y із значень координат за кожним GPS-приймачем лінійки.
45° до меридіана, а координати об'єкта визначають як середнє значення за осями координат Х та Y із значень координат за кожним GPS-приймачем лінійки.
Текст
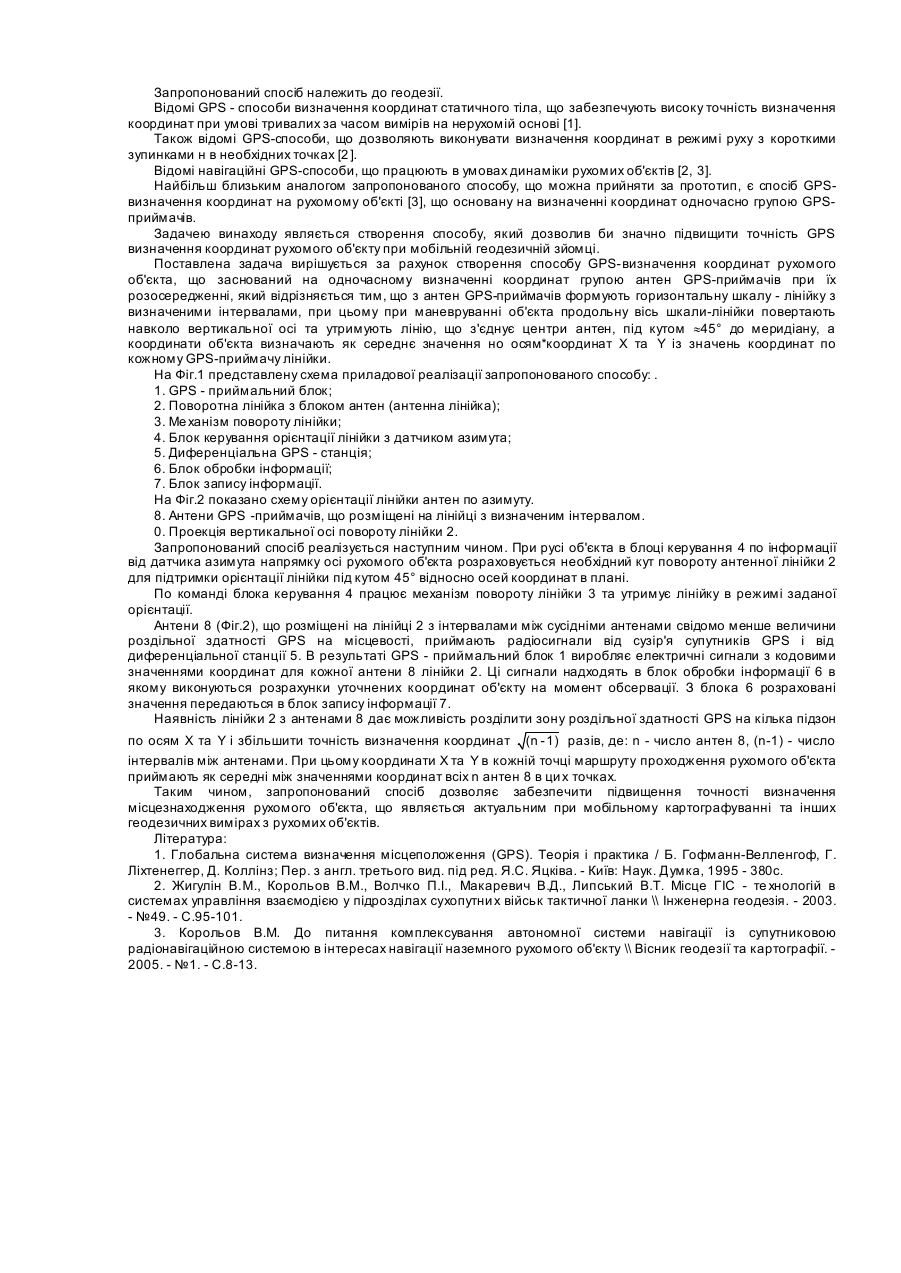
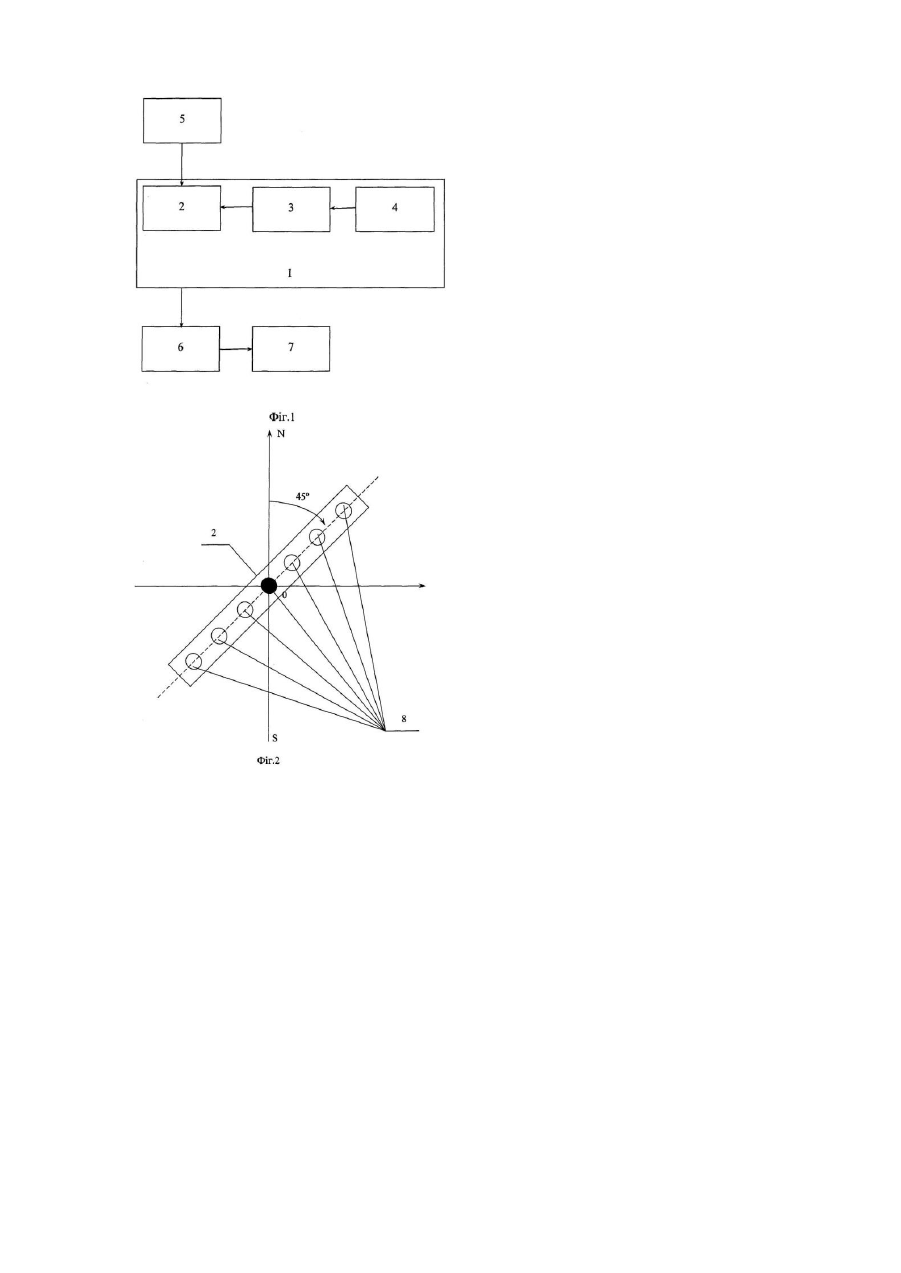
Запропонований спосіб належить до геодезії. Відомі GPS - способи визначення координат статичного тіла, що забезпечують високу точність визначення координат при умові тривалих за часом вимірів на нерухомій основі [1]. Також відомі GPS-способи, що дозволяють виконувати визначення координат в режимі руху з короткими зупинками н в необхідних точках [2 ]. Відомі навігаційні GPS-способи, що працюють в умовах динаміки рухомих об'єктів [2, 3]. Найбільш близьким аналогом запропонованого способу, що можна прийняти за прототип, є спосіб GPSвизначення координат на рухомому об'єкті [3], що основану на визначенні координат одночасно групою GPSприймачів. Задачею винаходу являється створення способу, який дозволив би значно підвищити точність GPS визначення координат рухомого об'єкту при мобільній геодезичній зйомці. Поставлена задача вирішується за рахунок створення способу GPS-визначення координат рухомого об'єкта, що заснований на одночасному визначенні координат групою антен GPS-приймачів при їх розосередженні, який відрізняється тим, що з антен GPS-приймачів формують горизонтальну шкалу - лінійку з визначеними інтервалами, при цьому при маневруванні об'єкта продольну вісь шкали-лінійки повертають навколо вертикальної осі та утримують лінію, що з'єднує центри антен, під кутом »45° до меридіану, а координати об'єкта визначають як середнє значення но осям*координат X та Υ із значень координат по кожному GPS-приймачу лінійки. На Фіг.1 представлену схема приладової реалізації запропонованого способу: . 1. GPS - приймальний блок; 2. Поворотна лінійка з блоком антен (антенна лінійка); 3. Ме ханізм повороту лінійки; 4. Блок керування орієнтації лінійки з датчиком азимута; 5. Диференціальна GPS - станція; 6. Блок обробки інформації; 7. Блок запису інформації. На Фіг.2 показано схему орієнтації лінійки антен по азимуту. 8. Антени GPS -приймачів, що розміщені на лінійці з визначеним інтервалом. 0. Проекція вертикальної осі повороту лінійки 2. Запропонований спосіб реалізується наступним чином. При русі об'єкта в блоці керування 4 по інформації від датчика азимута напрямку осі рухомого об'єкта розраховується необхідний кут повороту антенної лінійки 2 для підтримки орієнтації лінійки під кутом 45° відносно осей координат в плані. По команді блока керування 4 працює механізм повороту лінійки 3 та утримує лінійку в режимі заданої орієнтації. Антени 8 (Фіг.2), що розміщені на лінійці 2 з інтервалами між сусідніми антенами свідомо менше величини роздільної здатності GPS на місцевості, приймають радіосигнали від сузір'я супутників GPS і від диференціальної станції 5. В результаті GPS - приймальний блок 1 виробляє електричні сигнали з кодовими значеннями координат для кожної антени 8 лінійки 2. Ці сигнали надходять в блок обробки інформації 6 в якому виконуються розрахунки уточнених координат об'єкту на момент обсервації. З блока 6 розраховані значення передаються в блок запису інформації 7. Наявність лінійки 2 з антенами 8 дає можливість розділити зону роздільної здатності GPS на кілька підзон по осям X та Υ і збільшити точність визначення координат (n - 1) разів, де: n - число антен 8, (n-1) - число інтервалів між антенами. При цьому координати X та Υ в кожній точці маршруту проходження рухомого об'єкта приймають як середні між значеннями координат всіх n антен 8 в ци х точках. Таким чином, запропонований спосіб дозволяє забезпечити підвищення точності визначення місцезнаходження рухомого об'єкта, що являється актуальним при мобільному картографуванні та інших геодезичних вимірах з рухомих об'єктів. Література: 1. Глобальна система визначення місцеположення (GPS). Теорія і практика / Б. Гофманн-Велленгоф, Г. Ліхтенеггер, Д. Коллінз; Пер. з англ. третього вид. під ред. Я.С. Яцківа. - Київ: Наук. Думка, 1995 - 380с. 2. Жигулін В.М., Корольов В.М., Волчко П.І., Макаревич В.Д., Липський В.Т. Місце ГІС - те хнологій в системах управління взаємодією у підрозділах сухопутни х військ тактичної ланки \\ Інженерна геодезія. - 2003. - №49. - С.95-101. 3. Корольов В.М. До питання комплексування автономної системи навігації із супутниковою радіонавігаційною системою в інтересах навігації наземного рухомого об'єкту \\ Вісник геодезії та картографії. 2005. - №1. - С.8-13.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for gps-determination of coordinates of movable object
Автори англійськоюBorovyi Valentyn Oleksandrovych, Burachek Vsevolod Hermanovych, Mamontova Liudmyla Stepanivna, Nadtochii Oleksandr Volodymyrovych
Назва патенту російськоюСпособ gps-определения координат подвижного объекта
Автори російськоюБоровый Валентин Александрович, Бурачек Вселовод Германович, Мамонтова Людмила Степановна, Надточий Александр Владимирович
МПК / Мітки
МПК: G01B 7/004
Мітки: gps-визначення, спосіб, об'єкта, координат, рухомого
Код посилання
<a href="https://ua.patents.su/2-82794-sposib-gps-viznachennya-koordinat-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб gps-визначення координат рухомого об’єкта</a>
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Кравченко Юрій Васильович, Машков Олег Альбертович, Мосов Сергій Петрович, Савченко Віталій Анатолійович
МПК: G01S 5/02
Мітки: координат, визначення, об'єкта, швидкості, система, рухомого
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Пристрій для визначення координат рухомого випромінюючого об’єкта
Номер патенту: 46245
Опубліковано: 15.11.2004
Автори: Остапов Анатолій Олександрович, Чигирин Олег Трохимович, Стеріополо Євген Анатолійович, Тітов Валерій Сергійович, Радченко Октябрина Антонівна
Мітки: рухомого, об'єкта, визначення, пристрій, випромінюючого, координат
Формула / Реферат:
Пристрій для визначення координат рухомого випромінюючого об'єкта, що складається із апаратури ведучого та веденого приймальних пунктів, причому апаратура ведучого приймального пункту містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, перший блок обчислення відстані, датчик швидкості, датчик курсу, пристрій індикації, в якому перший вхід антени через привід антени сполучений з першим виходом...
Спосіб визначення просторових координат центра проекції знімальної камери
Номер патенту: 78826
Опубліковано: 25.04.2007
Автор: Глотов Володимир Миколайович
МПК: G01C 11/00
Мітки: спосіб, знімальної, проекції, камери, просторових, координат, визначення, центра
Формула / Реферат:
Спосіб визначення просторових координат центра проекції знімальної камери, який полягає в тому, що на земній поверхні в районі знімання встановлюють GPS-приймач, а на борту рухомого об'єкта встановлюють знімальну камеру і бортовий GPS-приймач, з'єднують їх між собою, приймають сигнали з бортового GPS-приймача і керують знімальною камерою, який відрізняється тим, що попередньо на бортовому GPS-приймачі встановлюють епохи, які відповідають...
Спосіб визначення планових координат точок на земній поверхні
Номер патенту: 64097
Опубліковано: 15.03.2005
Автори: Шевченко Тарас Георгійович, Романишин Ігор Богданович, Третяк Корнилій Романович, Голубінка Юрій Ігорович
МПК: G01C 5/00
Мітки: точок, земній, поверхні, визначення, спосіб, планових, координат
Формула / Реферат:
1. Спосіб обеззаражування овочів, фруктів та ягід в якому, почергово, спочатку ведуть промивання овочів, фруктів та ягід у негативно електроактивованій воді (католіті) з окислювально-відновлювальним потенціалом (-480) мВ, потім ведуть замочування овочів. фруктів та ягід у позитивно електроактивованій воді (аноліті) з окислювально-відновлювальним потенціалом (+1140) мВ, який відрізняється тим, що промивання овочів, фруктів та ягід ведуть у...
Спосіб визначення координат джерела радіовипромінювання в однобазовому вимірювальному комплексі
Номер патенту: 46388
Опубліковано: 15.05.2002
Автори: Березіна Світлана Іванівна, Голкін Дмитро Васильович, Худов Генадій Володимирович, Бутенко Ольга Станіславівна, Деденок Віктор Петрович
МПК: G01S 5/06
Мітки: вимірювальному, однобазовому, радіовипромінювання, джерела, визначення, комплекси, координат, спосіб
Формула / Реферат:
Спосіб визначення координат джерела радіовипромінювання в однобазовому вимірювальному комплексі, що полягає в тому, що приймачі радіовипромінювання розміщають у двох пунктах прийому з відомими координатами, вимірюють різницю дальностей від того самого джерела радіовипромінювання до приймачів і запам'ятовують час виміру, який відрізняється тим, що шляхом розміщення одного з приймачів випромінювання на літальному апараті національної...
Попередній патент: Спосіб виробництва казеїну в потоці та лінія для його здійснення
Наступний патент: Пристрій gps-визначення координат рухомого об’єкта
Випадковий патент: Горизонтальна коксова піч