Пристрій для забезпечення зв’язку у зоні обслуговування системи зв’язку
Номер патенту: 37290
Опубліковано: 15.05.2001
Автори: ВІВЕР, Ліндзі, А., Молодший, ДІН, Річард, Ф., Вітлі Чарльз Е. ІІІ


Формула / Реферат
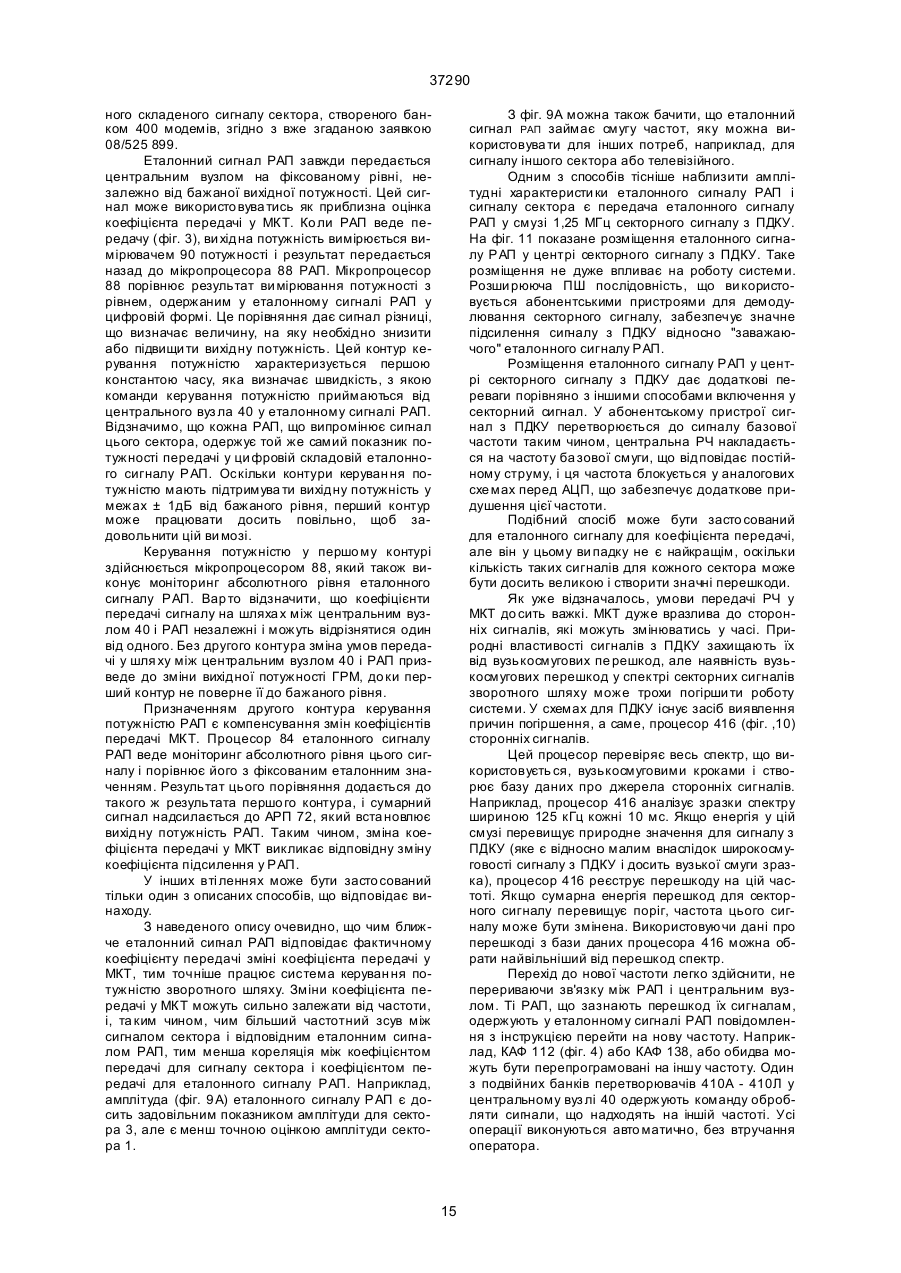
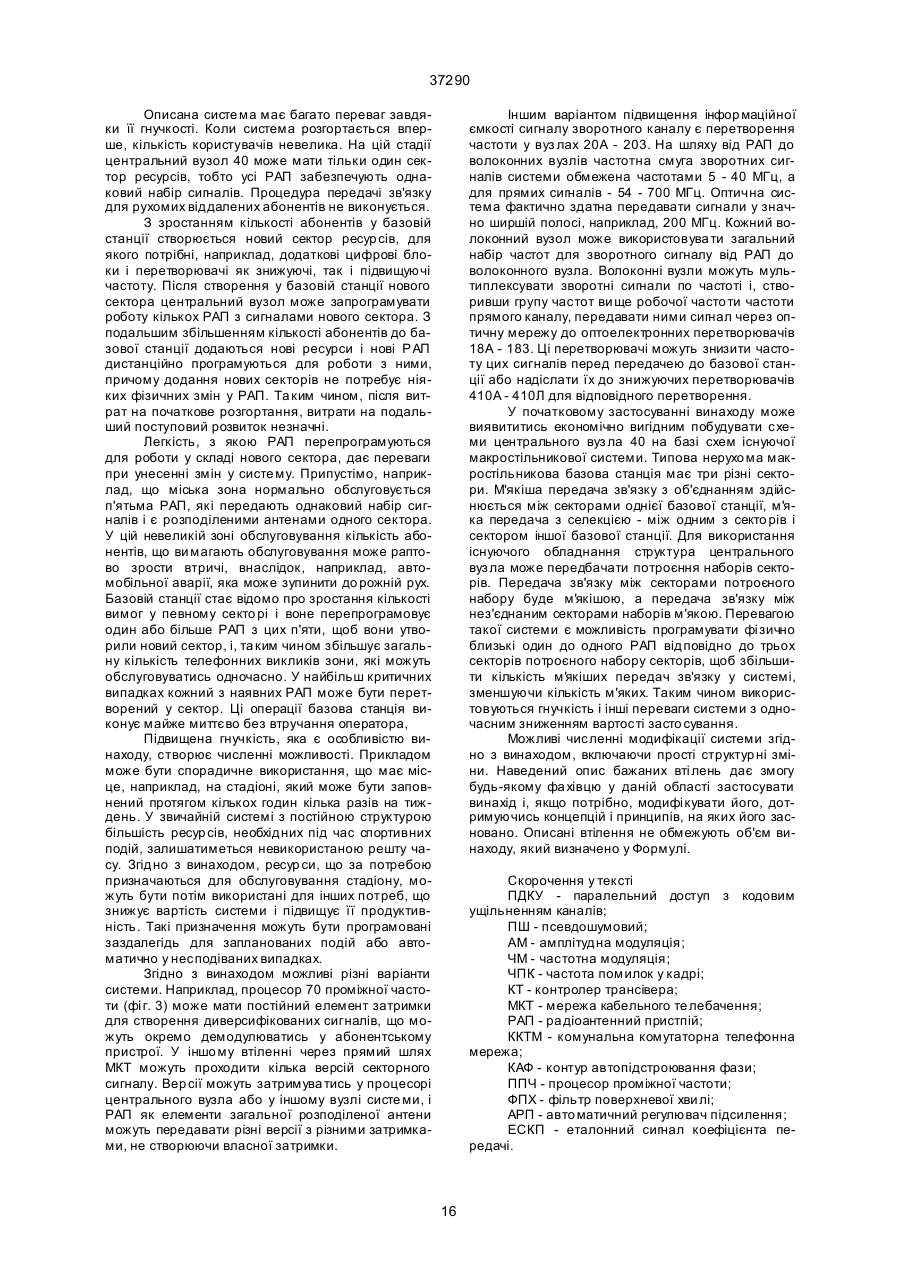
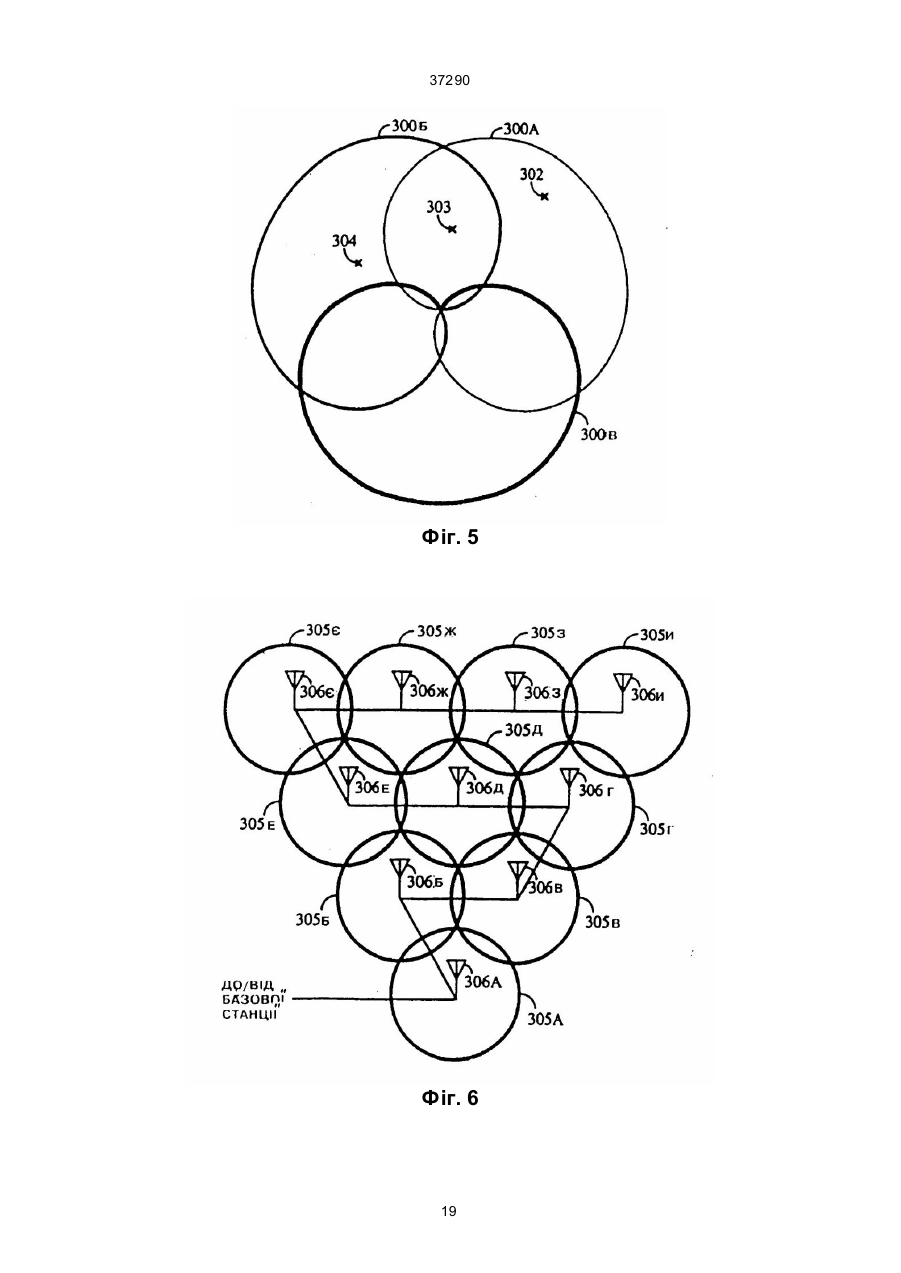
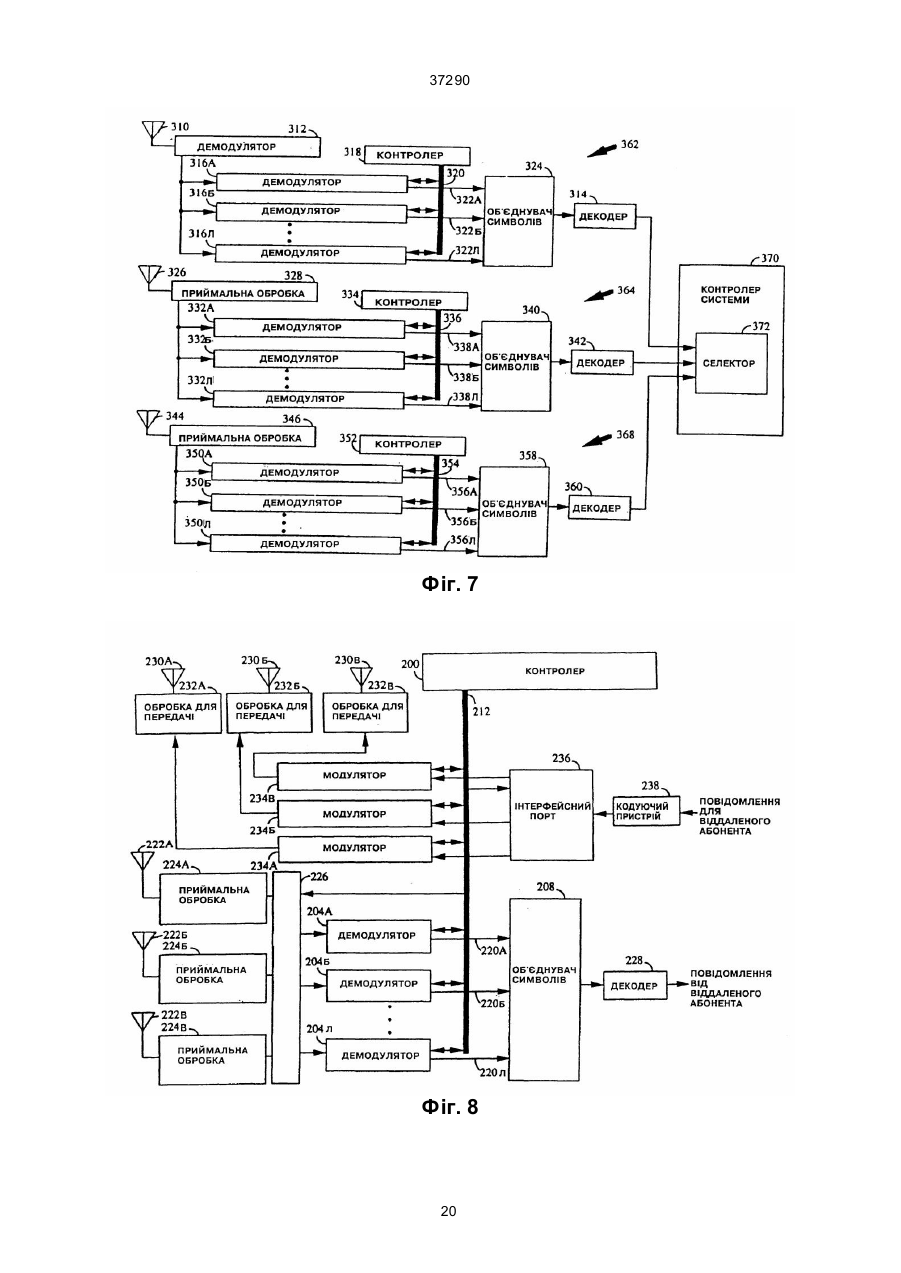
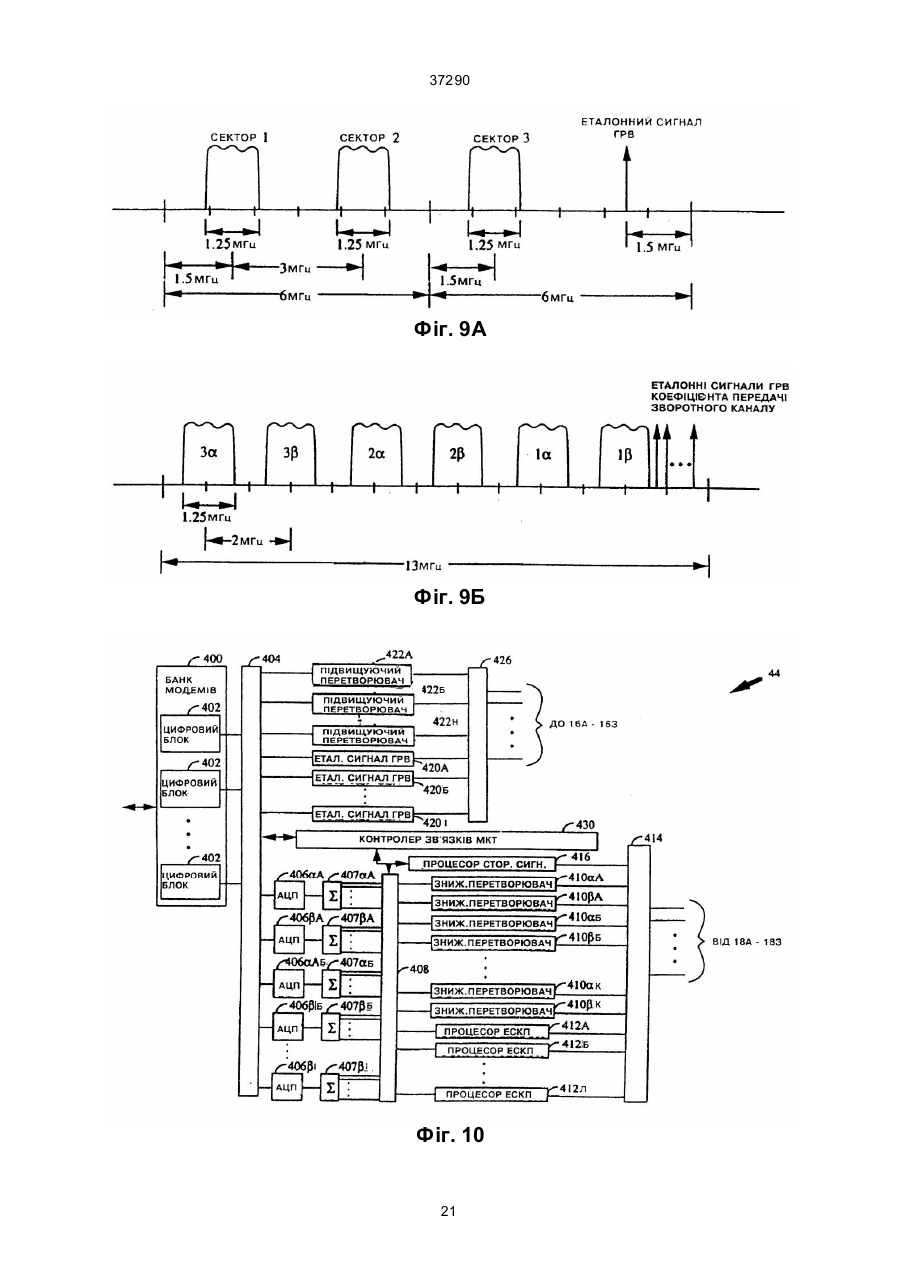
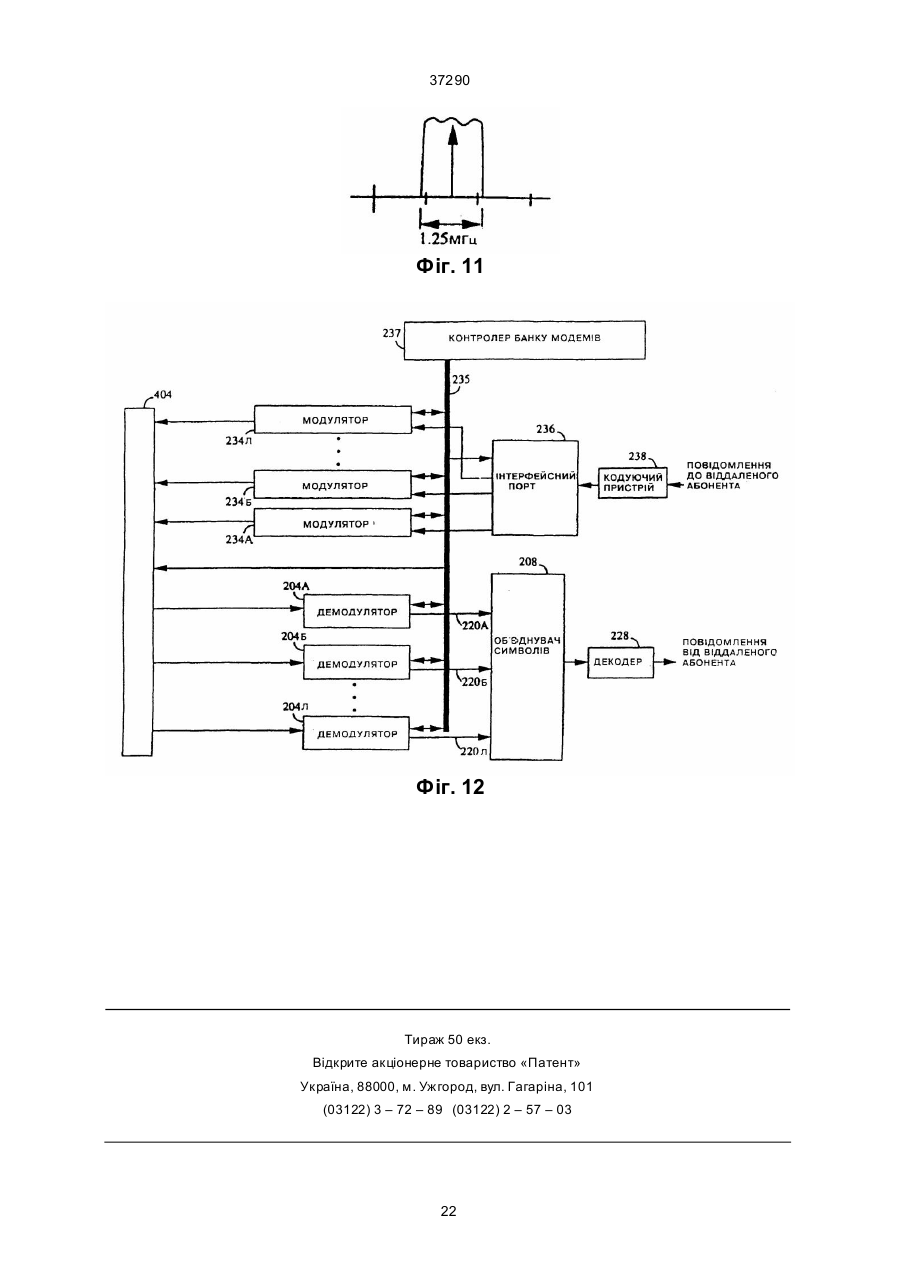
Пристрій для забезпечення зв'язку у зоні обслуговування системи зв'язку, що має ряд радіоантенних пристроїв (РАП), який відрізняється тим, що система зв'язку включає мережу кабельного телебачення з рядом РАП, розташованих через інтервали уздовж кабеля кабельної мережі, причому кожний з зазначеного ряду РАП має кабельний вхід, через який кожний з зазначеного ряду РАП приймає з зазначеного кабеля сигнал прямого каналу зв'язку разом з еталонним сигналом РАП, вихід для безпровідного зв'язку, через який кожний з зазначеного ряду РАП передає безпровідні сигнали прямого каналу зв'язку, вхід для безпровідного зв'язку, через який кожний з зазначеного ряду РАП приймає безпровідні сигнали прямого каналу зв'язку, і кабельний вихід, через який кожний з зазначеного ряду РАП надсилає у кабель сигнали зворотного каналу зв'язку разом з еталонним сигналом, що визначає коефіцієнт передачі прямого шляху, процесор центрального вузла, з'єднаний з зазначеним кабелем, який має базову станцію, що має у складі групу демодуляторів, програмно з'єднаних з щонайменше одним з сукупності зазначених рядів РАП, і у якому у випадку, коли перші два з зазначеного ряду РАП передають один загальний сигнал прямого каналу зв'язку, то ці зазначені перші два РАП працюють як елементи розподіленої антени, а у випадку, коли перші два з зазначеного ряду РАП передають різні сигнали прямого каналу зв'язку, то ці зазначені перші два працюють як сектори зазначеної системи зв'язку, причому зазначений еталонний сигнал РАП визначає, чи ці зазначені перші два РАП працюють як елементи або як сектори.
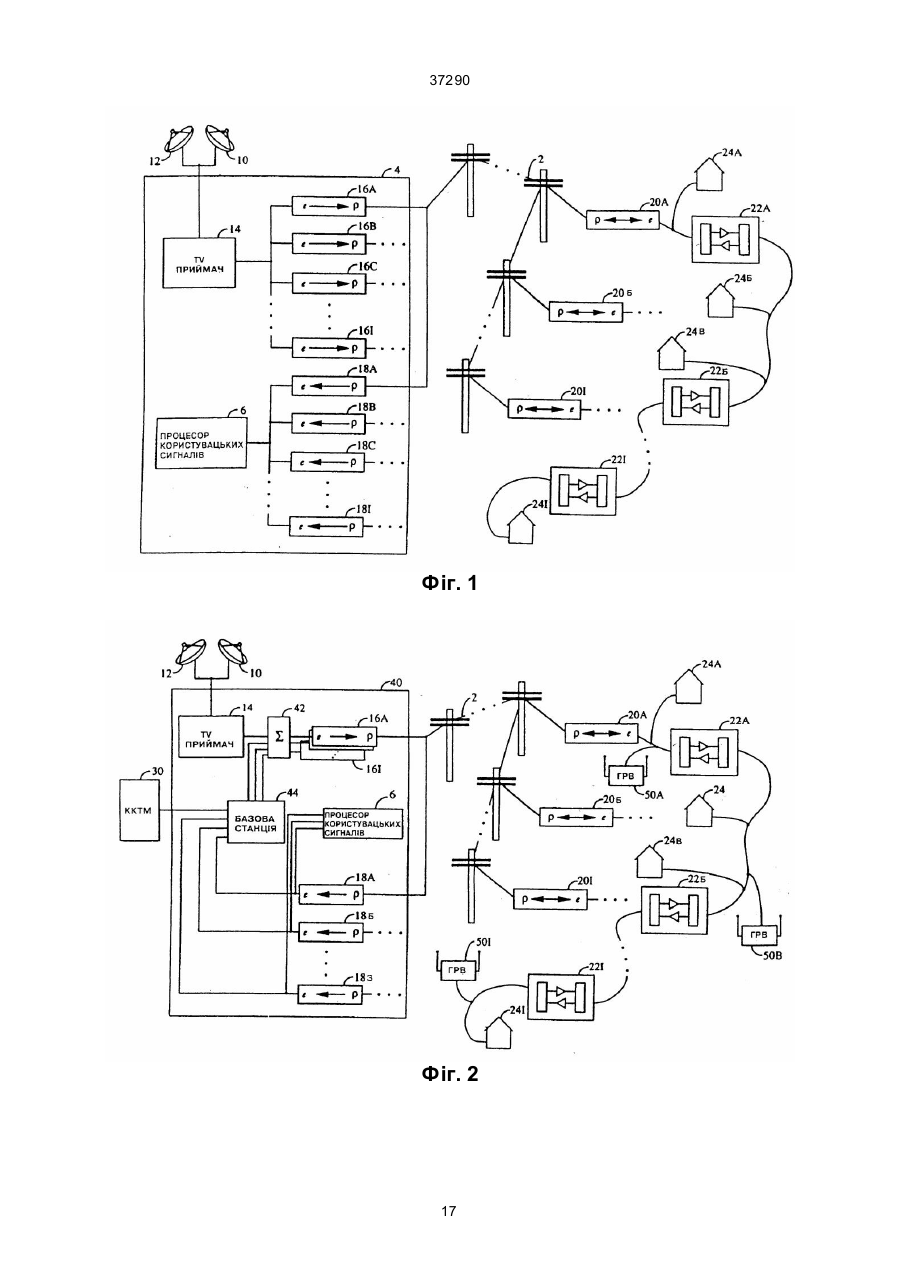
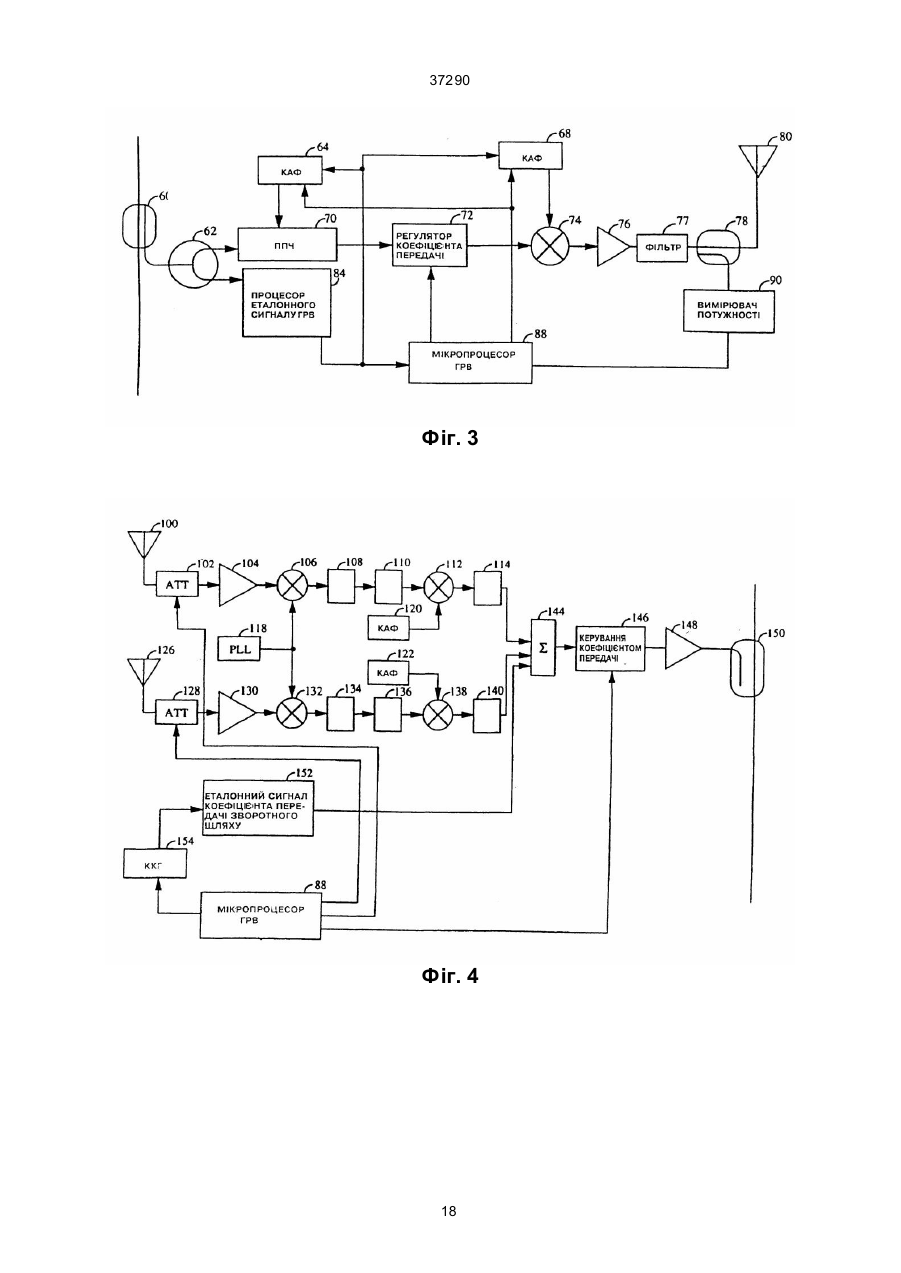
Текст
Пристрій для забезпечення зв’язку у зоні обслуговування системи зв’язку, що має ряд радіоантенних пристроїв (РАП), який відрізняється тим, що система зв’язку включає мережу кабельного телебачення з рядом РАП, розташованих через інтервали уздовж кабеля кабельної мережі, причому кожний з зазначеного ряду РАП має кабельний вхід, через який кожний з зазначеного ряду РАП приймає з зазначеного кабеля сигнал прямого ка C2 (54) ПРИСТРІЙ ДЛЯ ЗАБЕЗПЕЧЕННЯ ЗВ’ЯЗКУ У ЗОНІ ОБСЛУГОВУВАННЯ СИСТЕМИ З В’ЯЗКУ 37290 сигналів, що пройшли різними шляхами, можуть бути різними. Наприклад, імпульси потоку, що був прийнятий після входження ідеального імпульсу різними шляхами, можуть мати різні фази. У радіоканалі різні шляхи ви никають внаслідок відбиття сигналу пе решкодами довкілля, наприклад, будинками, деревами, авто мобілями і людьми. Взагалі радіоканал є багатошляховим з змінним часом проходження по шляха х, оскільки об'єкти, що створюють шляхи, рухомі. Наприклад, якщо такими шляхами пройде ідеальний імпульс, він створить потік імпульсів з положенням у часі, послабленням і фа зою, які можуть змінюватися у функції ча су. У багатошляхово му каналі може виникати завмирання, яке зумовлюється фазовими характеристи ками такого каналу. Во но має місце, коли вектори шляхів, ск ладаючись, взаємно знищуються, даючи сигнал, слабкіший за будь-який окремий вектор. Наприклад, якщо синусоїдальна хвиля проходить двома шляхами, перший з яких створює послаблення Х дБ, часову затримку d і фазовий зсув q, а другий - послаблення Х дб, затримку d і фа зовий зсув q + p, на ви ході каналу сигналу не буде. У вузькосмугових системах модуля ції, таких, як AM або ЧМ, що ви користо вують ся у звичайних радіотелефонних систе мах, наявність багатьох шляхів у каналі призводить до дуже сильного завмирання. Як уже відзначалось, у ши рокосмугових системах з ПДКУ на приймальній станції у процесі демодуляції окремі шляхи можуть бути відокремлені. Це не тільки дуже зменшує вп лив багатошляхово го завмирання, але й створює певні переваги систем з ПДКУ. У зразковій систе мі з ПДКУ кожна з базових станцій передає пілот-сигнал з загальним ПШ розширюючим кодом, зсунутий по фазі відносно пілот-сигналів інших стан цій. Під час роботи кожен з віддалених абонентів забезпечується списком фазових зсувів кодів, що відповідають сусіднім базовим станціям, оточуючим базову станцію, з якою підтримується зв'язок. Віддалений абонент має пошуковий елемент, який дозволяє абоненту стежити за силою пілот-сигналу від гр упи базових станцій, включаючи сусідні. Спосіб і система для створення зв'язку з віддаленим абонентом через більш, як одну базових станцій у процесі передачі зв'язку описано у па тенті США 5 267 261 від 30.11.1993. У цій системі зв'язок між абонентами не переривається під час передачі зв'язку від первісної базової станції до наступ ної. Така передача зв'язку розглядається як "м'яка" і у цьому випадку переривання зв'язку з первісною станцією відбувається після встановлення зв'язку з наступною. Коли віддалений абонент має зв'язок з двома станціями, у абонентському пристрої відбувається комбінування сигналів від кожної з станцій подібно до того, як це відбувається з багатошляхови ми сигналами від однієї станції. У типовій стільниковій систе мі контролер системи може створювати єдиний сигнал для кож ного з абонентів з сигналів, прийнятих кожною базовою станцією. У кожній базовій станції сигнали, прийняті від загального для них абонента, можуть бути об'єднані перед декодуванням і, таким чином, можуть бути ви користані переваги, які дає прийом кількох сигналів. Результати декодування у кожній з базових станцій надсилаються до контролера системи. Після декодування сигнал уже не можна об'єднувати з іншими. Отже, контролер системи має обирати з багатьох декодованих сигналів, що надійшли від базових станцій, які мають зв'язок з одним абонентом. З цих сигналів обирається найкращий, решта відкидається. Віддалений абонент сприяє м'якій передачі зв'язку, ви міряючи рівень пілот-сигналів від кількох сукупностей базових станцій. Активна сукупність утворюється базовими станціями, через які здійснено активний зв'язок. Сусідня сукупність - це такі базові станції серед оточуючих активну ба зову станцію, яким притаманна висока імовірність рівня сигналу, достатня для встановлення зв'язку. Сукупність кандидатів утворюється базовими станціями, для яких характерний рівень пілот-сигналу, достатній для встановлення зв'язку. На початковій стадії встановлення зв'язку віддалений абонент має зв'язок з першою базовою станцією, яка одна утворює активну сукупність. Абонент веде моніторинг рівня пілот-сигналів базових станцій активної і сусідньої сукупностей і сукупності кандидатів. Ко ли рівень пілот-сигналу базової станції з сусідньої сукупності перевищує зумовлене порогове значення, ця базова станція переводиться з сусідньої сукупності до сукупності кандидатів. Віддалений абонент надсилає відповідне повідомлення з ідентифікатором цієї нової станції до першої базової станції. Контролер стільникової або приватної системи зв'язку ви рішує, чи вста новити зв'язок між новою базовою станцією і абонентом. У випадку прийняття такого рішення цей контролер надсилає до нової базової станції повідомлення з ідентифікатором віддаленого абонента і командою встановити з ним зв'язок. До абонента через першу базову станцію також надсилається повідомлення, яке містить інформацію про нову активну сукупність, яка складається з першої і нової базових станцій. Віддалений абонент відшукує інфор маційний сигнал від нової базової станції і встановлює з нею зв'язок, не перериваючи зв'язку з першою базовою станцією. Ця процедура може повторюватись з додатковими базовими станціями. Підтримуючи зв'я зок з кількома базовими станціями, віддалений абонент продовжує моніторинг рівня пілот-си гналів ба зових станцій активної і сусідньої сукуп ностей і сукупності кандидатів. Якщо рівень сигналу від ба зової станції з активної сукупності стає нижче зумовленого порогу протягом зумовленого відрізку ча су, абонент фор мує і передає повідомлення про це. Контролер стільникової або приватної системи зв'язку приймає це повідомлення через щонайменше одну ба зову стан цію, яка має зв'язок з цим абонентом. Да лі контролер може виріши ти припинити зв'язок через базову стан цію з слабким пілот-сигналом і у цьому ви падку фор мує по відомлення про нову активну сукупність базових стан цій, до якої не входить базова станція, зв'язок через яку припинено. Базові станції, через які встановлено зв'язок надсилають повідомлення до віддаленого абонента. Контролер системи також повідомленням інструктує базову станцію припинити зв'язок з абонентом. Таким чином, зв'язок з віддаленим абонентом 2 37290 здійснюється тільки через базові станції, що утворюють нову активну сукупність. Оскільки віддалений абонент підтримує зв'язок з співрозмовником завжди через щонайменше одну базову станцію, цей зв'язок не переривається при м'якій передачі зв'язку. М'яка передача зв'язку, тобто "зв'я зок перед перериванням" дає відчутні переваги над звичайним "перериванням перед зв'язком", яке використо вується у інши х системах. У стільникових або приватних телефонних системах зв'язку дуже важливо максимізувати продуктивність системи, тобто кількість телефонних сеансів зв'язку, які вона здатна обслуговувати одночасно. Продук тивність систем з розширеним спектром може бути максимізована, якщо потужність передачі кожного з віддалених абонентів регулюється таким чином, що передані сигнали надхо дять до приймача базової станції, маючи однаковий рівень. У реальних системах кожний віддалений абонент може вести передачу з тією мінімальною потужністю, яка забезпечує та ке відношення сигнал/шум, з яким ще можливе надійне одержання даних. Якщо сигнал від абонента, що надійшов до базової станції, має занадто низький рівень потужності, частота появи помилкових бі тів може виявитись занадто великою для якісного зв'язку внаслідок перешкод від інши х віддалених абонентів. З іншо го боку, якщо потужність передачі від віддаленого абонента занадто ве лика, якість зв'язку з цим абонентом буде високою, але потужний сигнал буде перешкодою для інших абонентів і може поруши ти зв'язок з ними. Таким чином, щоб максимізувати продуктивність зразкової системи з ПДКУ з розширеним спектром, базова станція керує потужністю передачі кожного з віддалених абонентів, що знаходяться у зоні обслуговування цієї станції, таким чином, щоб приймати від них сигнали однакового номінального рівня. У ідеальному ви падку повна потужність сигналів, що приймає базова станція дорівнює номінальній потужності сигналу від віддаленого абонента, помноженій на кількість абонентів, що ведуть передачу у зоні обслуговування цієї станції, плюс прийнята потужність від віддалених абонентів, що обслуговуються сусідніми базовими станціями. Втрати у шля ху ра діоканалу можна ха ракте ризувати дво ма окремими факторами: се редніми втратами сигналу у шля ху і завмиранням. Прямий канал від ба зової стан ції до віддаленого, абонен та працює на часто ті, що відрізняється від часто ти з во ротного ка налу зв'яз ку, тобто від абонента до базової стан ції. Оскільки частоти пря мого і зво ротного каналів ле жать у одній і тій же загаль ній смузі, існує суттєва ко реляція між середніми втратами сигналу у шля ху у ци х канала х. Але завмирання у прямому і зворотному канала х є не залежними явища ми і можуть змінюва тися з ча сом. У зразковій системі з ПДКУ кожний віддалений абонент оцінює втрати сигналу у шляху у прямому каналі, базуючись на повній потужності сигналів, що приймаються абонентом. Повна потужність є сумою потужностей сигналів від усі х базових станцій, які віддалений абонент приймає на одній частоті. Ба зуючись на оцінці середніх втрат у прямому каналі, віддалений абонент вста новлює рівень потужності передачі у зворотному каналі. Якщо проходження у зворотному каналі від одного з віддалених абонентів раптово поліпшується, оскільки завмирання у прямому і зворотному каналах незалежні, потужність сигналу, що приймає базова станція від цього абонента, підвищить ся. Це підвищення створює додаткові перешкоди для усі х сигналів цієї ж частоти. Отже, швидка реакція абонента на раптове поліпшення проходження у каналі підвищує якість роботи систе ми. Таким чином, необхідно, щоб базова станція допомагала керуванню потужністю у віддаленому абонентському пристрої. Потужність передачі віддаленого абонента може керуватись однією або більше базових станцій. Кожна з таких станцій, що має зв'язок з віддаленим абонентом, виміряє рівень сигналу від цього абонента. Виміряний рівень сигналу порівнюється з бажаним для цього абонента. Команда на зміну потужності формується кожною базовою станцією і передається до віддаленого абонента у прямому каналі зв'язку. У відповідь на цю команду віддалений абонент підвищує або знижує потужність передачі на зумовлену ве личину. Цей спосіб забезпечує швидку реакцію на зміни у каналі і у середньому поліпшує е фективність роботи системи. Зазначимо, що у ти повій стільниковій систе мі базові станції не мають між собою безпосереднього зв'язку, і кожній базовій станції не відомий рівень сигналу від абонента, який приймають інші базові станції. Коли віддалений абонент має зв'язок з більш, як однією базовими станціями, кожна з них надсилає до нього команди на зміну потужності передачі. У відповідь на ці команди від базових станцій віддалений абонент уникає передавати з рівнем потужності, який може перешкодити сеансам зв'язку інших віддалених абонентів, але утримує потужність, достатню для підтримування зв'язку цього абонента з щонайменше однією базовою станцією. Таке керування потужністю досягається, якщо віддалений абонент підвищує потужність передачі тільки тоді, коли усі базові станції, з якими абонент має зв'язок, вимагають цього підвищення, і якщо він знижує потужність передачі, коли будьяка з базових станції, з якими він має зв'язок, вимагає цього зниження. Таку систему керування потужністю передачі описано у патенті США 5 056 109 від 8.10.1991. Зв'язок віддаленого абонента з кількома базовими станціями є важливим елементом м'якої передачі зв'язку. Описаний спосіб керуван ня потужністю є оптимальним, коли віддалений абонент має зв'язок з усіма базовими станціями, з якими можливий зв'язок. У цьому випадку абонент не створює перешкод зв'язку че рез базову станцію, яка приймає від абонентського пристрою сигнали занадто ви сокого рівня, але не може передавати команди на зміну потужності до віддаленого абонента з причини відсутності зв'язку з ним. Типова стільникова або приватна система зв'язку містить базові станції, що мають кілька секторів. Багатосекторна базова станція має кілька незалежних антен для прийому-передачі. Одночасний зв'язок з двома секторами базової станції називають "м'якішою передачею зв'язку". Для віддаленого абонента м'яка і м'якіша передачі зв'язку 3 37290 не відрізняються одна від одної. Однак, базові станції з м'якою і м'якішою передачею зв'язку у роботі відрізняються. Коли віддалений абонент має зв'язок з двома секторами однієї базової станції, демодульовані інформаційні сигнали обох секторів можна об'єднувати у базовій станції перед передачею до контролера стільникової або приватної системи зв'язку. Оскільки два сектори базової станції мають спільні схеми і функції керування, ці сектори можуть мати доступ до різних ти пів інформації, чого не мають незалежні базові станції. Крім того, два сектори однієї базової станції надсилають до віддаленого пристрояоднакову інфор мацію стосовно керування потужністю, як це описано далі. М'я кіша передача зв'язку дозволяє об'єднувати демодульовані дані від різних секторів перед декодуванням і, таким чином, одержувати єдині вихідні дані. Процедуру об'єднання можна виконувати, урахо вуючи відносний рівень кожного сигналу, що робить таку процедуру найбільш надійною. Як уже відзначалось, базова станція може приймати багато примірників одного сигналу від віддаленого абонента. Кожному демодульованому примірнику призначається демодулятор. Демодульовані виходи об'єднуються, і одержаний сигнал декодується. Демодулятори можуть бути призначені не єдиному сектору, а сигналу від будь-якого з секторів базової станції, і, та ким чином, базова станція може ефективно використовувати свої ресур си, призначаючи демодулятори найсильнішому сигналу. Об'єднання сигналів від секто рів однієї базової станції дозволяє також секторизованій базовій станції формувати єдину команду на зміну потужності для системи керування потужністю віддаленого абонента. Таким чином, команди на зміну потужності від секторів однієї базової станції однакові. Така уніфі кованість керування потужністю робить процес передачі зв'язку більш гнучким, оскільки керування потужністю передачі абонента стає нечутливим до диверсифікування секторів. Більш детально м'якішу передачу зв'язку описано у заявках 08/144 903 від 30.10.1993, 08/144 901 від 30.10.1993 і 08/316 155 від 30.09.1994 на патент США. Кожна базова станція стільникової системи має зону обслуговування прямим каналом зв'язку, яка визначає фізичні межі, за якими зв'язок базової станції з віддаленим абонентом погіршується. Інакше кажучи, якщо абонент знаходиться у зоні обслуговування, він може підтримувати зв'язок з базовою станцією, якщо ж ні, то такий зв'язок стає ненадійним. Базова станція може мати один або кілька секторів. Односекторна базова станція має приблизно круглу зону обслуговування, багатосекторні станції мають зону обслуговування у вигляді пелюсток, що відхо дять від станції. Зона обслуговування базової станції має дві межі передачі зв'язку. Ме жа передачі зв'язку характеризується тим, що на ній канали зв'язку віддаленого абонента як з першою, так і з другою базовими станціями працюють однаково. Кожна базова станція має межі передачі зв'язку для прямого і зворотного каналів. Межа передачі зв'язку прямого каналу визначається тим, що на ній приймач віддаленого абонента працює однаково як з першою, так і з другою базовими станціями. Межа передачі зв'язку зворотного каналу визначається тим, що на ній приймачі обох базових станцій мають однаковий прийом від одного віддаленого абонента. У ідеальному випадку межі збалансовані, тобто фізично збігаються. У іншо му випадку продуктивність системи може знизитись внаслідок порушен ня керування потужністю і зайвого розширення зони передачі зв'язку. Слід відзначити, що баланс меж передачі зв'язку є функцією часу, оскільки зона обслуговування зменшуєть ся з зростанням кількості абонентів у ній. Потужність у зворотному каналі зв'язку, яка зростає з появою нового абонента, зво ротно пропорційна до зони обслуговування зворотного каналу. Підвищен ня потужності прийому зменшує ефективний розмір зони обслуговування базової станції у зворотному каналі і наближає до станції відповідну межу передачі зв'язку. Для забезпечення високої ефективності стільникових систем з ПДКУ або іншого типу важливо ретельно і точно керува ти потужністю передачі базових станцій і віддалених абонентів. Таке керування обмежує кількість взаємних перешкод у системі, а точне підтримування потужності передачі у прямому каналі може балансувати межі передачі зв'язку прямого і зворотного каналів для базової станції або одного сектора багато секторної базової станції. Таке балансування допомагає знизити розмір зони передачі зв'язку, поліпшити роботу віддаленого абонента у цій зоні і підвищити загальну продук тивність системи. Перед включенням нової базової станції у існуючу мережу потужності прямого (тобто передаючого) і зворотного (приймаючого) каналів приблизно дорівнюють 0. Процедура включення починається з встановлення великих значень у атенюаторі приймача, що створює високий рівень потужності штучних шумів при прийомі. Атенюатор передавача встановлюється подібним чином, що знижує рівень потужності. Високий рівень штучних шумів зумовлює дуже малий розмір зони обслуговування нової станції у зво ротному каналі. Оскільки зона обслуговування прямого каналу пропорційна до потужності передачі, дуже низький рівень потужності передачі зумовлює дуже малий розмір зони обслуговування нової станції у прямому каналі. Після цього одночасно змінюють встановлені значення у атенюаторах приймача і передавача. Послаблення на приймальній стороні зменшують, зменшуючи цим рівень штучних шумів, підви щуючи рівень прийому сигналів і розширюючи зону обслуговуван ня у зворотному каналі. Послаблення у передавачі також знижують, підви щуючи цим потужність передачі і збільшуючи зону обслуговування прямого каналу. Швидкість підвищення потужності передачі і зниження рівня шумів має бути досить низькою, щоб доданням нової станції (або вилучен ням станції) не поруши ти передачу зв'язку між новою і оточуючими базовими станціями. Початковим калібруванням кожної з базових станцій сумарні шуми незавантаженого приймача і бажана пілотна потужність встановлюються рівними константі. Константи калібрування однакові для усі х базових станцій. З завантаженням системи (з початком зв'язку з віддаленими абонентами) ком 4 37290 пенсаційна мережа підтримує постійне співвідношення між потужністю прийому у зворотному каналі і пілотною потужністю, випромінюваною базовою станцією. Завантаження базової станції наближає до неї межу передачі зв'язку зворотного каналу. Отже, для досягнення такого ж ефекту у прямому каналі пілотну потужність знижують з зростанням завантаження. Процес балансування меж передачі зв'язку прямого і зворотного каналів, який називають диханням базової станції, описано у патенті США 5 548 812 від 20.08.1996. Балансування меж передачі зв'язку прямого і зворотного каналів у процесі додання або вилучення базової станції у систе мі, які називають розквітом або в'яненням станції, описано у патенті США 5 475 870 від 12.12.1995. Бажано керува ти відносним рівнем потужності сигналів прямого каналу, які передає базова станція, в залежності від керуючої інформації, яку передає кожний віддалений абонент. Головною причиною цього є необхідність брати до уваги можливість поганого проходження у шляха х до погано розташованих абонентів. Якщо не підвищити потужність передачі до абонента, що знаходиться у поганих умовах, якість сигналу може стати неприйнятною. Прикладом цього може бути ви падок, коли втрати у шляху до однієї або двох сусідніх базових станцій майже такі ж, як у шля ху до станції, з якою підтримує зв'язок погано розташований абонент. У такому випадку сумарні перешкоди, яких зазнає цей абонент, утричі перевищують перешкоди, які б мали місце, якби він знаходився у відносній близькості до базової станції. Крім того, завмирання перешкод від сусідніх базових станцій не змінюються синхронно з сигналом від активної станції, як це було б з перешкодами від активної базової станції. У та кій ситуа ції віддалений абонент для підтримки нормального зв'язку може зажадати додаткових 3 - 4 дБ потужності сигналу від активної базової станції. У інших ви падках віддалений абонент може опинитись у місці, де відношення сигнал/шум незвичайно високе, і тоді базова станція може передавати у прямому каналі з потужністю, нижчою за номінальну, знижуючи цим перешкоди для інших сигналів системи. Щоб здійснити таке керуван ня, приймач абонентського пристрою може бути обладнаний засобом для вимірювання відношення сигнал/шум. Таке вимірювання здійснюють порівнянням потужності бажаного сигналу з повною потужністю перешкод і шумів. Якщо це відношення менше за зумовлене значення, віддалений абонент передає до базової станції вимогу додаткової потужності у прямому каналі. У протилежному випадку абонент передає до базової станції вимогу знизити потужність. Одним з способів визначення приймачем абонента відношення сигнал/шум є моніторинг частоти помилок у кадрах (ЧПК) сигналу. Базова станція приймає вимоги зміни потужності від кожного з віддалених абонентів і відповідає на це зміною потужності відповідного сигналу прямого каналу на зумовлену величину. Такі зміни невеликі, звичайно від 0,5 до 1,0 дБ, тобто приблизно 12%. Швидкість зміни потужності може бути дещо нижчою, ніж у зворотному каналі, наприклад, одна зміна за сек. У бажаному вті ленні ви находу динамічний діапазон регулювання у прямому каналі може бути у межах від -4 дб до +6 дБ відносно номінальної потужності передачі. Базові станції з ПДКУ здатні точно керувати рівнем потужності передачі. Для цього необхідно компенсувати зміни коефіцієнтів передачі окремих компонентів, що складають передаючу секцію станції. Такі зміни викликаються змінами температури і старінням і, отже, проста процедура калібрування не гарантує точного рівня потужності передачі. Зміни коефіцієнтів передачі може бути компенсована зміною загального коефіцієнта передачі ланцюга передачі таким чином, що фактична потужність передачі дорівнюватиме бажаній. Кожен з секторів базової станції створює кілька каналів передачі, які функціонують з різними швидкостями передачі даних і відносними рівнями сигналу, утворюючи РЧ сигнал передачі. Мо дулятори каналів обчислюють очікувану потужність кожного сигналу у каналі. Базова станція також має у складі контролер трансивера (КТ), який генерує бажану вихідну потужність, сумуючи очікувані потужності каналів. Важливою операцією у вп ровадженні безпровідної систе ми зв'язку є розташуван ня антен у зоні обслуговування таким чином, щоб у кожній точці цієї зони, де може опинитись віддалений абонент, забезпечувався достатній рівень сигналу. Щоб створити розподілену анте ну, ви хідний сигнал базової станції, призначений для передачі, надсилають до антен з часовою затримкою. Розподілена антена дозволяє використати здатність системи з ПДКУ прямої послідовності розрізняти багатошляхові сигнали створенням штучних шля хів, що задовольняють критеріям розрізнення. Спосіб поліпшення роботи системи з розподіленою антеною, який передбачає використання паралельних гр уп окремих антен, у яких кожна антена відрізняється від інши х часовою затримкою, описано у патенті США 5 280 472 від 18.01.1994. Подальший розвиток цього способу описано у заявці 08/112 392 від 27.08.1993 на патент США. У системах з розподілом антен сигналам, що передаються від антен, які належать до однієї групи, надаються часові затримки на шляху від базової станції до антени. Ан тенні вуз ли можуть мати схеми зниження часто ти для зменшення втрат у кабелі між антенним вузлом і базовою станцією і для можливості використання стандартних елементів затримки. Іншою перевагою розподілених антен є малий об'єм додаткових робіт, пов'язаних з місцем розташування. За нормальних умов розташування антени може мати обмеження, зумовлене тільки фі зичними особливостями місця, і має задовольняти ви мозі, щоб кожне можливе місце обслуговувалось двома антенами. Взаємне перекриття у цьому випадку не має значення і, хоча може бути навіть бажаним, оскільки забезпечує диверсифікацію зв'язку з абонентами, не є обов'язковим. Ме тою мережі мобільних персональних телефонів є обслуговування великого регіону. Ве ликі розміри регіону, що обслуговується, є суттєвою вимогою і його обслуговуван ня має забезпечува тись з першого дня, щоб залучи ти користувачів у цьому регіоні. Одними з найбільших витрат, пов'язаних з цим, є втрати на придбання нерухо мості і прав на використання землі, а також на встановлення ба 5 37290 зових станцій, кожна з яких має обслуговувати певну части ну регіону. Слід відзначити, що мережі кабельного телебачення (МКТ) обслуговують майже усі приміські зони. Тому, якщо використа ти МКТ як основу мережі безпровідного зв'язку, витрат на придбання нерухо мості, прав на використання землі і на встановлення базових станцій можна уникнути. Центральний головний процесор може виконувати усі функції обробки сигналів у межах регіону, а кабельні засоби розповсюдження можуть нести сигнали до користувачів. Особливості систем з ПДКУ дають численні переваги безпровідним системам з використанням МКТ. Ін тегрування безпровідної системи зв'язку у МКТ можна здійснити таким чином, що буде забезпечено високі гнучкість і продуктивність системи з ПДКУ. Задачею винаходу є створення способу і пристрою для інтегрування приватної системи зв'язку з МКТ. Ра діоантенні пристрої (РАП) приєднують до МКТ. РАП забезпечує перетворення частоти і керування потужністю сигналу, що приймається від МКТ для передачі до віддалених абонентів. РАП також забезпечує перетворення частоти і керуван ня потужністю сигналу, що приймається віддалених абонентів для передачі у МКТ. У головному пункті МКТ встановлюють базову станцію, призначену бути інтерфейсом між РАП і комунальною комутаторною телефонною мережею (ККТМ). Базова станція виконує функції стандартної макростільникової базової станції, такі, як знижуюче перетворення частоти, демодуляцію, керування потужністю, об'єднання сигналів і підвищуюче перетворення часто ти. Ця станція може також виконувати деякі з функцій, які звичайно виконує центральний контролер макростільникової системи, наприклад, вибір вокодерів. Крім цих функцій, базова станція МКТ має компенсувати зміни коефіцієнта передачі у МКТ. Керування потужністю у прямому каналі визначається еталонним сигналом РАП, який для підвищення ефективності може знаходитись у сигналі ПДКУ. У процесі керування потужністю у зворотному канал використовується еталонний сигнал, який індивідуально передається кожним РАП у цьому каналі. Ар хітектурі, що відповідає винаходу, притаманна висока гнучкість. Кожний РАП може працювати як елемент розподіленої антени або як сектор базової станції. У обох випадках РАП може бути дистанційно програмований головним процесором. Таким чином, щільність обслуговування системи можна географічно змінювати згідно з зміною інформаційного завантаження каналів зв'язку. При розгортанні системи важлива гнучкість. На цій стадії усій систе мі може бути потрібний тільки один сектор базової станції для обслуговування початкової малої кількості користувачів. У подальшому для підвищення продуктивності на центральному пункті можуть бути додані додаткові ресур си. РАП перепрограмуються центральним процесором з центрального пункту для роботи з доданими ресур сами. Безпосередній зв'язок з ресурсами базової станції дозволяє систе мі об'єднувати сигнали, що надхо дять до різних секто рів усієї систе ми після демодуляції, але перед декодуванням. Це дозволяє здійснювати м'якішу передачу зв'язку по усій зоні обслуговування. У подальшо му детальному описі розглянуто особливості, задачі і переваги ви находу з посиланнями на креслення, де: фіг. 1 - схе ма прикладу МТК; фіг. 2 - блок-схема зразка МКТ, інтегрованого з приватною системою зв'язку; фіг. З - схе ма РАП, призначена для обробки сигналу прямого каналу зв'язку; фіг. 4 - схема РАП, призначена для обробки сигналу зворотного каналу зв'язку; фіг. 5 - діаграма опромінювання антени трьохсекторної базової станції; фіг. 6 - сукупність розподілених антен, що забезпечують обслуговування концентрованої зони; фіг. 7 - зразок втілення стандартної стільникової системи з трьохсекторними базовими станціями; фіг. 8 - одне з втілень трьохсекторної базової станції стандартної стільникової системи; фіг. 9 А - зразок спектрального розподілу у кабельній лінії прямого каналу зв'язку; фіг. 9Б - зразок спектрального розподілу у кабельній лінії зворотного каналу зв'язку; фіг. 10 - блок-схеми втілення базової станції згідно з винаходом; фіг. 11 - ва ріант, коли еталонний сигнал РАП займає місце у центрі секторного сигналу ПДКУ; фіг. 12 - блок-схе ма, що частково ілюструє функції цифрових блоків. На фіг. 1 зображено зразок МТК. Ан тени 10, 12 центрального вуз ла 4, призначені для зв'язку з супутниками, приймають телевізійні (TV) сигнали у діапазонах Кu і С. TV приймач 14 центрального вуз ла 4 перетворює ці сигнали у сигнали нижчих РЧ для передачі через МТК. Ти пові телевізійні сигнали приймаються у діа пазоні частот 54 - 550 МГц. Вихідні РЧ сигнали TV приймача надхо дять до блоку перетворювачів 16А - 163 електричних сигналів у оптичні. Кожний з цих перетворювачів перетворює електричні сигнали у оптичні для передачі через оптичне волокно до зон обслуговування, у яких встановлено оптоелектричні вузли 20А - 203. Наприклад, во локно 2 несе оптичний сигнал від перетворювача 16А до вуз ла 20А. Оптоелектричні вузли 20А -203 розташовані у зонах, що обслуговуються сигналом волокна 2, і надсилають електричні сигнали через кабель до користувачів 24А - 243, тобто у будинки, житлові і конторські споруди. Уздовж електричного сигнального кабеля розта шовано двонапрямкові підсилювачі 22А - 223. Електричні сигнальні кабелі разом з підсилювачами можуть утворювати паралельні і/або зіркові конфігурації на відміну від послідовного з'єднання фіг. 1. Шлях те левізійного сигналу від центрального вузла 4 до користувачів 24А - 243 будемо називати прямим. Місто з населенням близько 1 млн має три або чотири центральних вуз ли. Волоконні лінії, подібні до лінії 2, прокладено на довгі відстані у підземних каналах або над землею на стовпах. Довжина кабелів, що несуть електричний сигнал від вузлів 20А - 203, дорівнює 1,6 км (1 миля) або менше залежно від кількості користувачів. Дво нап 6 37290 рямкові підсилювачі 22А - 223 можуть бути розташовані на кабелі через кожні 300 м (1000 футів). Звичайно на одному кабелі розташова но не більше 5 та ких підсилювачів, щоб уникнути взаємомодуля ційних спотворень, що створюються підсилювачами. Правила Федеральної Комісії Зв'язку вимагають, щоб кожна МТК забезпечувала двосторонній зв'язок з користувачами. Тому у до даток до прямого шляху для телевізійного сигналу система забезпечує зворотний шлях для сигналу від користувачів 24А - 243 до центрального вуз ла 4. Завантаження зворотного шляху сигналами значно менше, ніж завантаження прямого шляху. Зво ротний шлях може використо вува тись користувачем для обрання платних передач. Робота зворотного шляху, по суті, подібна роботі прямого шляху. Частота сигналів у зворотному шляху знаходиться у діапазоні 5 - 40 МГц. Від користувачів 24А - 243 через сигнальний електричний кабель сигнали проходять до вузла 20А. У вузлах 20А - 203 електричні сигнали перетворюються у оп тичні і передаються через волокно 2 до центрального вуз ла 4. Тут сигнали перетворюються у електричні перетворювачами 18А - 183 і обробляються процесором 6 користувацьких сигналів. У типових конфі гура ціях між перетворювачами 16А - 163 і вузлами 20А - 203 існує взаємно однозначне співвідношення. Фіг. 2 містить схе му, згідно з якою систему згідно з винаходом інтегровано з МКТ фіг. 1. Центральний вузол 4 замінено вузлом 40, який забезпечує безпровідний зв'язок. Центральний вузол 40 включає базову станцію 44, яка є інтерфей сом між мережею безпровідного зв'язку і ККТМ 30 і, крім того, генерує сигнали ПДКУ прямого каналу, а також пілотні і інші службові сигнали, які проходять прямим шляхом. Станція 44 також здійснює селекцію і об'єднання інформаційних і службових сигналів, що надхо дять зворотним шляхом. Як уже відзначалось, прямим шляхом звичайно проходять телевізійні сигнали діапазону 54 550 МГц, але можливе проходження сигналів частотою до 700 МГц. Деякі нові системи можуть працювати на частотах до 850 МГц. У застарілих системах, що працюють у діа пазоні 350 - 450 МГц, може виявитись необхідним звільнити кілька T.V. для використання у системі зв'язку. У ба жаному вті ленні винаходу сигнали прямого каналу зв'язку мають частоту від 550 до 700 МГц. Кожний сектор прямого каналу ПДКУ одержує смугу у діапазоні частот МКТ. Сигнали прямого каналу ПДКУ від базової станції складаються з телевізійними сигналами від приймача 14 у суматорі 42 і потім, подібно до телевізійних сигналів, проходять прямим шляхом МКТ. Як детально пояснюється далі, призначенням деяких сигналів ПДКУ прямого каналу є РАП 50А -503. Вони випромінюють сигнал прямого каналу ПДКУ для зони обслуговування, пов'язаної з оптоелектричним вузлом 20А, і розташовані уздовж електричного сигнального кабеля, пов'язаного з вузлом 20А, з інтервалом 300 - 45D м (1000 1500 футів). Сигнали прямого каналу ПДКУ проходять через підсилювачі 22А - 223 разом з телевізійними. Очевидно, що РАП 50А - 503 мають бути розташовані таким чином, щоб сигнали, випримінювані ними, були досить високого рівня по усій зоні обслуговування. Якщо кабель від вузла 20А прокладено під землею, РАП 50А - 503 необхідно вста новлювати поблизу користувачів 24А - 243. Якщо кабель проходить під землею, він виходить назовні для з'єднання з обладнанням користувача. РАП 50А - 503 можуть бути встановлені на дахах будинків. Якщо кабель проходить поверхнею, РАП 50А - 503 можна встановлювати уздовж кабеля будь-де, або на стовпах, що підтримують кабель. Як уже відзначалось, сигнали зворотного шляху ле жать у діапазоні 5 - 40 МГц. Канал ПДКУ зворотного зв'язку працює найбільш ефективно, якщо зворотні шляхи ди версифіковано таким чином, щоб кожен з РАП 50А - 503 мав дві антени для забезпечення окремих сигналів для базової станції 44. Отже, якщо сигнали зворотного каналу ПДКУ мультиплексовано у МКТ за частотою, для цього каналу потрібна частотна смуга, удвічі ширша, ніж для прямого каналу. Але зворотний шлях МКТ може надати тільки 35 МГц. То му, як показано на фіг. 2, кожний вузол 20А - 203 створює прямий шлях, що відповідає одному з перетворювачів 18А - 183, які з'єднано з центральним вузлом 40. Базова станція 44 має двосто ронній зв'язок сигналами з ККТМ 30. Уже відзначалась важливість керуван ня потужністю у прямому і зворотному каналах систем з ПДКУ. У існуючих системах з ПДКУ засоби генерування сигналів і анте на об'єднано і тому базові станції можуть встановлювати потужність передачі і виміряти рівень прийнятих сигналів безпосередньо. На відміну від цього у системах на базі МКТ базова станція 44 і РАП 50А - 503 можуть розділятись відстанями у кілька км. Крім того, окремі РАП пов'язані з базовою станцією 44 різними шляхами, які до того ж можуть мати різні коефіцієнти передачі, зумовлені широким діапазоном температур, при яких працює МКТ. Крім того, на МКТ можуть діяти різні сторонні динамічні сигнали. У міському довкіллі виникають численні сторонні сигнали від інших систем зв'язку (наприклад, локальних телевізійних систем, комерційних систем радіомовлення тощо) і від різних машин, які створюють випадкові випромінювання (наприклад, запуск автомобіля). Ці сигнали з'являються непередбачено і можуть сильно змінюватитись з часом. З цих причин керування потужністю стає важливою задачею ви находу. Компенсація змін потужності у прямому каналі зв'язку здійснюється використанням еталонного сигналу РАП, що передається прямим шляхом. У зво ротному каналі ця операція здійснюється за допомогою зворотного еталонного сигналу, який проходить зворотним шляхом. Форма і функції цих сигналів детально розглядаються далі. Перед поясненням процедури керування потужністю розглянемо структуру РАП. Кожний РАП обробляє сигнали як прямого, так і зворотного каналів. На фіг. З на ведено схе му обробки сигналу прямого зв'язку у РАП згідно з винаходом. РЧ сигнал з електричного кабеля надходить через з'єднуючий елемент 60. Розгалужувач 62 розділяє цей сигнал для використання двома різними обробляючими засобами. Процесор 84 еталонного сигналу РАП відокремлює цей сигнал з суміші сигналів у кабелі. 7 37290 Еталонний сигнал РАП має три призначення: бути еталонним значенням коефіцієнта передачі каналу, бути еталоном для синтезаторів частот і передавати керуючу інфор мацію до РАП. Процесор 84 еталонного сигналу РАП ві докремлює частотний еталонний сигнал з еталонного сигналу РАП і надсилає його до контурів 64, 68 автопідстроювання фази (КАФ), а та кож відокремлює еталонний сигнал значення коефіцієнта передачі каналу, який потім обробляється мікропроцесором 88 РАП і спрямовується до регулювача 72 коефіцієнта передачі. Крім того, процесор 84 відокремлює дані для керування і надсилає їх до мікропроцесора 88 РАП для аналізу. Да ні для керування можуть містити команди від центрального вуз ла 40, призначені тільки для цього РАП. Наприклад, ці дані можуть містити команду змінити частоту КАФ 64 або 68. Процесор 70 проміжної частоти (ППЧ) також приймає сигнал від розгалужувача 62. ППЧ 70 змінює частоту вхідного сигнала таким чином, що сигнал стає центрованим навколо зумовленої проміжної часто ти. Як уже відзначалось, сигнали прямого каналу ПДКУ частотно мультиплексовано у МКТ. Частота, генерована у КАФ 64, змішуєть ся з вхідним сигналом таким чином, що одержаний сигнал стає центрованим навколо зумовленої проміжної частоти. Типовий ППЧ 70 має фільтр поверхневої акустичної хви лі (ФПХ) або іншо го типу, що пропускає сигнали від РАП і блокує сигнали від розгалужувача 62. Якщо відстань між окремими РАП не достатня для створення часової затримки, необхідної для багатошляховості, ППЧ 70 може мати змінний або програмований елемент затримки. ППЧ 70 надсилає сигнал проміжної частоти до регулювача 72 коефіцієнта передачі. Регулювач 72 вста новлює потужність передачі РАП згідно з сигналом керування, одержаного від мікропроцесора 88 РАП. Змішувач 74 перетворює сигнал керування коефіцієнтом, що надхо дить від регулювача, і підвищує частоту до частоти передачі. Підсилювач потужності 76 згідно з номінальним коефіцієнтом підсилення підсилює сигнал, надаючи йому потужність, необхідну для передачі. Фільтр 77 відокремлює сигнал для передачі і придушує небажані сигнали змішувача. З'єднувач 78 витягає з сигналу для передачі малий зразок і надсилає його до ви мірювача 90 потужності, і результат надсилається назад до мікропроцесора 88. Фіг. 4 ілюструє обробку сигналу зворотного каналу у РАП згідно з бажаним втіленням винаходу. Ан тени 100, 126 належать РАП. Дві рознесені антени у кожному РАП забезпечують потрібну диверсифікацію. Відстань між антенами має бути такою, щоб во ни опримінювали одну й ту ж зону і мали незалежні завмирання. Застосування двох антен на одній базовій станції з метою диверсифікування часто використовуєть ся у макростільникових системах; такі антени обслуговують зони розміром кілька км. Звичайно відстань між антенами складає приблизно від 5 до 20 довжин хвилі, що забезпечує загальну зону обслуговування і назалежні завмирання. Як уже відзначалось, для повного використання переваг диверсифікації кожний сигнал окремо демодулюють перед їх об'єднанням. Демодуляція виконується у центральному вуз лі 40. Таким чином, назад до центрального вуз ла 40 від РАП надсилаються два окремі сигнали альфа і бета, прийняті антенами 100 і 126 відповідно. Внаслідок цього сигнали зворотного шляху МКТ ви магають смуги частот, приблизно удвічі ширшої, ніж для сигналів прямого шляху. Сигнали альфа і бета від антен 100, 126 надхо дять до керованих атенюаторів 102, 128 відповідно. Ці атенюатори виконують дві важливі функції. Для належного об'єднання сигналів, демодульованих у вузлі 40, їх відносні рівні мають бути відомими, щоб при об'єднанні їм були надані відповідні ваги. Оскільки від кожного РАП надходить тільки один еталонний сигнал, що визначає коефіцієнт передачі, цей сигнал має визначати відносні рівні обох прийнятих сигналів від одного РАП. Отже, шляхи проходження цих сигналів мають бути збалансованими, тобто мати однакові коефіцієнти передачі і рівні шумів. Атенюатори 102, 126 калібрують ці альфа- і бе та-шляхи. Другим призначенням керованих атенюаторів 102, 128 є дихання і розквітання РАП. Дихання - це процес балансування меж передачі зв'язку відносно сусіднього РАП у прямому і зворотному каналах. Розквітання є процес додання і вилучення РАП з систе ми. Мікропроцесор 88 керує цими процесами, керуючи послабленням у атенюаторах 102, 128. Дихання і розквітання можуть бути здійснені у різних варіантах, детально описаних у патентах США 5 548 812, 5 475 870. Далі на шляху прийняті сигнали підсилюються низькошумовими підсилювачами 104, 130 і після цього перетворюються у сигнали фіксованої частоти змішува чами 106, 132. Фіксована проміжна частота не залежить від частот прийняти х сигналів і від частоти передачі сигналів від РАП до центрального вузла 40 через МКТ. Змішува чі 106, 132 працюють, одержуючи частоту від КАФ 118, яка програмуєть ся мікропроцесором 88 РАП і залежить також від еталонного сигналу КАФ (зв'я зок не показаний). Виходом змішува чів 106, 132 є частоти певної смуги, що визначається відповідними фільтрами 108, 134, які відфільтровують небажані частотні складові. Елементи затримки 110, 136 можуть бути постійними, змінними або керованими. Потреба у затримці у шля ху прийнятого сигналу може виникнути у випадку, коли, наприклад, об'єднуються сигнали від антен 100, 126 або коли сигнали об'єднуються з сигналами від інших РАП у МКТ. Див. патент США 5 280 472 та заявку 08/112 392. Змішувач перетворює альфа- і бета-сигнали у належну частоту для передачі по МКТ, використовуючи сигнали від КАФ 120, 122 відповідно. Ці КАФ програмуються мікропроцесором 88 РАП і використовують еталонний сигнал РАП (зв'язок не показано). Суматор 144 складає альфа- і бета-сигнали і еталонний сигнал, що визначає коефіцієнт передачі зворотного шляху. Ре гулювач 146 коефіцієнта передачі регулює коефіцієнт передачі для об'єднаного сигналу, а підсилювач 148 підсилює цей сигнал. З'єднувач 150 пропускає цей сигнал у МКТ. На фіг. 4 знов наведено мікропроцесор 88 РАП. У бажаному вті ленні він є єдиним обробляючим засобом, що забезпечує керуван ня як прийомною, так і передавальною частинами РАП. Показано також керований напругою кварцевий генера 8 37290 тор (ККГ) 154 з температурною компенсацією. ККГ 154 генерує тактовий сигнал для мікропроцесора 88 РАП і еталонний сигнал для генератора 152 еталонного сигналу для коефіцієнта передачі (ЕСКП) зворотного шляху. Мікропроцесор 88 РАП може також синхронізувати і/або підстроювати фазу ви хідного сигналу ККГ 154, використовуючи еталонний сигнал РАП після його появи. При першому включенні РАП ККГ 154 забезпечує тактові імпульси і еталонні сигнали, які використовуються для функціонального розгортання. Генератор 152 еталонного сигналу для коефіцієнта передачі зворотного шляху керує потужністю РАП. Кожний РАП передає до центрального вуз ла 40 окремий еталонний сигнал для коефіцієнта передачі зворотного шляху. У вуз лі 40 сигнал вимірюється і порівнюється з рівнями одержаних інши х та ких сигналів. Вузол 40 еталонним сигналом РАП може надіслати до окремих РАП команди знизити або підви щити потужність сигналів, які РАП надсилає у МКТ. Як уже відзначалось, коефіцієнти передачі у МКТ помітно змінюються з часом, причому ці коефіцієнт і зміни різні для різних частот. Кожний РАП потребує окремого еталонного сигналу для коефіцієнта передачі зворотного шляху, який можна відокремити у центральному вуз лі 40, навіть якщо сигнали, які він генерує об'єднані з сигналами від інши х РАП. Де тальний опис цієї операції наведено далі. Уже відзначалось, що ти пова стільникова система має у складі сукупність рознесених базових станцій, кожна з яких має кілька антен. Типова стільникова базова станція може складатись з трьох або більше секто рів з безпосереднім зв'язком між ними. Кожний сектор транслює окремий набір сигналів, відмінний від наборів інших секторів базової станції. Оскільки компоненти секторів знаходяться у одному місці, вони можуть використовува тись спільно і бути з'єднаними між собою. На фіг. 5 зображено типову тр ьохсекторну антену, яка обслуговує зони 300А, визначену тонкою лінією, 300Б, визначену се редньою лінією, і 300В, визначену жирною лінією. Форма трьох зон обслуговування, наведених на фіг. 5, відповідає зоні, яку утворює стандартна дипольна антена. На краях зон обслуговування віддалений абонент приймає сигнал найменшого рівня, який ще достатній для підтримання зв'язку з цим секто ром. ,3 просуван ням абоненту усередину зони секто ра сила сигналу, який він приймає від базової станції, зростає. Віддалений абонент, що знаходиться у пункті 302, може підтримувати зв'я зок через сектор 300А, з пункту 303 - че рез сектори 300Б і 300В і з пункту 305 - через сектор 300В. Коли абонент просувається за край сектора, зв'язок через цей сектор може погіршитись. Віддалений абонент, для якого відбувається м'яка передача зв'язку від базової станції фіг. 5 до сусідньої (не показаної), скоріш за усе, знаходиться біля краю одного з секторів. Систе му з розподіленими антенами описано у па тенті США 5 280 472. Тут передбачено встановлення ряду антен з затримками сигналу між ними. Такий ряд може обслуговувати зону подовженої форми або зони з великою кількістю послаблюючих об'єктів. Та кі антени, наприклад, можуть обслуговувати вулицю між дуже високими будин ками, поза кутом, тобто у випадках, коли у звичайних сигнал блокується. Систе ма з розподіленими антенами може використо вува тись не тільки для подовжених, а і для концентрованих зон. Наприклад, на фіг. 6 зображено сукупність антен 306А - 306И, які обслуговують відповідні зони 305А - 305И. Систе ма з розподіленими антенами звичайно використовується з одним сектором базової станції, і кожна з антен 306А - 306И передає одну й ту ж групу сигналів, навіть коли між анте нами встановлено елементи затримки. Крім гнучкості сто совно форми зони обслуговування, перевагою розподілених антен є відносно постійний рівень потужності сигналів, що передаються до віддалених абонентів зони обслуговування. Завдяки цьому віддалені абоненти мають можливість відмовитись від передачі з великою потужністю і, отже, зберегти енергію батарей живлення. У системі з розподіленими антенами фіг. 6 при переході віддаленого абонента з однієї зони до іншої ніякої передачі зв'язку не відбувається. Зв'язки через більш, як одну антену 306А - 306И, сприймаються базовою станцією і абонентом як бага-тошляхові і обробляються як такі. На фіг. 7 зображено втілення стандартної стільникової системи з трьома односекторними базовими станціями 362, 364, 368. Антени 310, 326, 344 є приймальними анте нами станцій 362, 364, 368 відповідно. Базові станції 362, 364, 368 розташовані поблизу одна однієї, і антени 310, 326, 344 мають зони обслуговування, які перекриваються таким чином, що може відбуватись така м'яка передача зв'язку з абонентом, у якій беруть участь усі три станції одночасно. Кожна з антен 310, 326, 344 може бути системою розподілених антен, як на фіг. 6; зви чайно кожний сектор має дві антени. Кожна з розподілених антен має зв'язок з власною системою приймальної обробки, і, отже для сигналів кожної з антен може бути призначений демодулятор. Ан тени 310, 326, 344 надсилають прийняті сигнали до систем 312, 328, 346 приймальної обробки відповідно. Ці системи обробляють РЧ сигнали і перетво рюють їх у цифрову двій кову форму і, крім того, можуть фільтрувати цифрові біти. Система 312 обробки надсилає фільтровані цифрові біти до демодуляторів 316А - 316Л, система 328 до демодуляторів 332А - 332Л і система 346 - до демодуляторів 350А -350Л. Контролер 318 через з'єднуючий елемент 320 керує демодуляторами 316А -316Л. Цей контролер призначає ці демодулятори для одного з екземплярів інформаційного сигналу одного з абонентів, прийнятих базовою станцією 362. Такі екземпляри сигналу можуть бути породжені багатошляховістю довкілля. Демодулятори дають біти даних, які об'єднує об'єднувач 324 символів. Вихідні сигнали об'єднувача 324 можуть містити дані для м'якого прийняття рішень, придатні для декодування Вітербі. Декодер 314 декодує об'єднані дані і надсилає результат до контролера 370 стільникової або приватної системи зв'язку як Повідомлення 1. Засновуючись на силі об'єднаного сигналу, одержаного з усіх сигналів, демодульованих де 9 37290 модуляторами 316А - 316Л, контролер 318 формує команди керування потужністю, які базова станція 362 передає до абонента. Контролер 318 може пересилати відповідну інформацію до передавача (не показаний) базової станції 362 для передачі до абонента. Контролер 334 через зв'язок 336 керує демодуляторами 332А - 332Л. Цей контролер призначає ці демодулятори для одного з екземплярів інфор маційного сигналу одного з абонентів. Демодулятори 332А - 332Л надсилають біти даних, які об'єднує об'єднувач 340 символів. Вихідні сигнали об'єднувача 340 можуть містити дані для м'я кого прийняття рішень, придатні для декодування Вітербі. Декодер 342 декодує об'єднані дані і надсилає результат до контролера 370 стільникової або приватної системи зв'язку у вигляді Повідомлення 2. Засновуючись на силі об'єднаного сигналу, одержаного з усіх сигналів, демодульованих демодуляторами 332А - 332Л, контролер 334 формує команди керування потужністю, які базова станція 364 передає до абонента. Контролер 334 може пересилати відповідну інформацію до передавача (не показаний) базової станції 364 для передачі до абонента. Контролер 352 через зв'язок 354 керує демодуляторами 350А - 350Л. Цей контролер призначає ці демодулятори для одного з екземплярів інфор маційного сигналу одного з абонентів, прийнятих ба зовою станцією 368. Демодулятори надсилають біти даних, які об'єднує об'єднувач 358 символів. Вихідні сигнали об'єднувача 358 можуть містити дані для м'якого прийняття рішень, придатні для декодування Вітербі. Декодер 360 декодує об'єднані дані і надсилає результат до контролера 370 стільникової або приватної системи зв'язку у вигляді Повідомлення 3. Засновуючись на силі об'єднаного сигналу, одержаного з усіх сигналів, демодульованих демодуляторами 350А - 350Л, контролер 352 формує команди керування потужністю, які базова станція 368 передає до абонента. Контролер 352 може пересилати відповідну інформацію до передавача (не показаний) базової станції 368 для передачі до абонента. Для кожного віддаленого абонента у системі з м'якою передачею зв'язку контролер 370 стільникової або приватної системи одержує декодовані дані від що найменше дво х ба зових стан цій. Наприклад, контролер 370 (фіг. 7) одержує декодовані дані у вигляді Повідомлень 1,2,3 від загального абонента че рез базові станції 362, 364, 368 відповідно. Декодовані дані не можна об'єднувати, щоб мати переваги, які дає об'єднання перед декодуванням. Отже, типовий контролер 370 стільникової або приватної системи не об'єднує де кодовані дані від кожної з базових станцій, а замість цього обирає з Повідомлень 1, 2, 3, що містять ці дані, таке, яке має найвищий проказник якості, і відкидає інші два. Селектор 372 (фіг. 7) здійснює такий вибір, перевіряючи кадр за кадром, і надсилає результат до вокодера або іншого засобу обробки даних. Цей процес докладно описано у заявці 08/519 670 на патент США. Об'єднані але не декодовані дані від об'єднувачів 324, 340, 358 не надсилаються безпо середньо від базових станцій 362, 364, 368 до контролера системи 370 тому, що з виходу демодулятора дані надходять з дуже великою швидкістю. Для одержання декодованого символа декодер потребує ве ликих блоків даних. Відношення кількості даних, потрібних для декодування символа, до кількості даних, потрібних для визначення декодованого символа і показника якості, може досягати 1000 до 1. Крім того, часові затримки, викликані пересиланням таких ве ликих об'ємів інформації стають неприпустимими, якщо використовувати швидкісний зв'язок. Таким чином, об'єднання тільки декодованих даних і показників якості замість недекодованих даних суттєво спрощує взаємозв'язок між сотнями базових станцій і контролером систе ми. Передача великої кількості інформації, пов'язаної з об'єднаними, але не декодованими даними, не тільки складна, але й коштовна. Базові станції типової системи знаходяться на значній відстані від контролера системи, і шлях від ба зової станції до контролера звичайно містить арендовану лінію зв'язку, наприклад, типу Т1. Вартість таких ліній залежить, головним чином, від кількості даних, що проходять через них, і, отже, збільшення об'ємів інформації, що пересилаються через ці лінії, можуть зробити їх вартість неприпустимо високою і викликати технічні ускладнення. У менш досконалих системах селекційний спосіб виконання м'якої передачі зв'язку, описаний згідно з фіг. 7, можна застосува ти для секторованих базових станцій, розглядаючи кожний сектор як окрему незалежну базову станцію. Кожний сектор базової станції може об'єднувати і декодувати багатошляхові сигнали від одного віддаленого абонента. Декодовані дані можуть надсилатися до контролера системи кожним сектором негайно або після порівняння і селекції. Однак, більші переваги дає використання м'якішої передачі зв'язку згідно з заявкою 08/144 903 на патент США. Відповідні схемні наведено на фіг. 8. На фіг. 8 сектор має приймальні антени 222А - 222В і передавальні антени 230А - 230В. Ан тени 222А і 230А мають загальну зону обслуговування і в ідеальному випадку можуть мати однакові діаграми спрямованості. Також загальні зони обслуговування мають пари антен 222Б, 230Б і 222В, 230В. На фіг. 8 зображено типову базову станцію, анте ни 222А - 222В якої мають зони обслуговування з таким взаємним перекриттям, що сигнал від одного абонента можуть одночасно приймати більш, як одна антена. Ан тени 222А 222В можуть мати діаграми спрямованості згідно з фіг. 5 і можуть бути розподіленими. Ан тени 222А - 222В надсилають прийнятий сигнал до приймальних засобів 224А - 224В обробки, які обробляють РЧ сигнал і перетворюють його у ци фрову форму. За соби 224А - 224В можуть також фільтрувати сигнал, після чого надсилають його до інтерфейсного порту 226. Порт 226 може створювати для кожного з цих трьох сигналів шлях до демодуляторів 204А - 204Л, якими через з'єднання 212 керує контролер 200. Контролер 200 призначає демодулятори одному з екземплярів інформаційних сигналів від одного абонента, прийнятих будь-яким з секторів. З виходів де модуляторів 204А - 204Л надхо дять ін 10 37290 формаційні біти 220А - 220Л, які відповідають даним від одного віддаленого абонента. Об'єднувач 208 символів об'єднує біти 220А - 220Л у єдиний комплект даних, прийняти х від абонента. Вихідні сигнали об'єднувача 200 можуть місти ти дані для м'якого прийняття рішень, придатні для декодування Вітербі. Об'єднані сигнали надсилаються до декодера 228. Демодулятори 204А - 204В та кож виробляють кілька сигналів керування і надсилають їх до контролера 200 через з'єднання 212. Ця інформацію включає оцінку сили сигналу, призначеного окремому демодулятору, яку кожний з демодуляторів одержує виміряючи силу призначеного йому сигналу. Слід відзначити, що об'єднувач 208 символів може об'єднувати тільки сигнали від одного секто ра або від кількох секто рів, обраних інтерфейсним портом 226. З оцінок сил сигналів, прийнятих усіма секторами, контролер 200 виробляє одну команду керування. Контролер 200 може переслати інфор мацію, необхідну для керування потужністю, до передавальної частини кожного з секторів базової станції, і, таким чином, кожний сектор передає до одного абонента одну і ту ж інформацію для керування потужністю. Коли об'єднувач 208 символів об'єднує сигнали від віддаленого абонента, що надійшли через більш, як один сектор, цей абонент знаходить ся у процесі м'якішої передачі зв'язку. Базова станція може надсилати сигнали від декодера 228 до контролера стільникової або приватної системи зв'язку. Цей контролер може виробляти один вихідний сигнал, застосовуючи описану вище процедуру селекції до сигналів від абонента, прийнятих цією або інши ми базовими станціями. Повідомлення від співрозмовника, призначене для передачі до віддаленого абонента, надхо дить від контролера системи. Це повідомлення може бути передане однією або більше з антен 230А - 230В. Інтерфейсний порт 236 створює для повідомлення для віддаленого абонента шлях до одного або більше модуля торів 234А - 234В згідно з настановою від контролера 200. Модуля тори 234А - 234В модулюють повідомлення для абонента відповідним ПШ кодом і надсилають модульовані дані до передавальних засобів 232А - 232В обробки. Ця обробка включає перетворення у РЧ сигнали і передачу з належною потужністю антенами 230А - 230В відповідно. Слід відзначити, що інтерфейсні порти 226 і 236 працюють незалежно, тобто прийом сигналу від певного віддаленого абонента антенами 222А - 222В не означає, що відповідні антени 230А - 23В обов'язково передаватимуть сигнал до цього абонента. Крім того, усі антени передають одну й ту ж команду керування потужністю, і тому диверсифікація секторів однієї базової станції не є суттєвим фактором способу керування потужністю. Ці переваги використано у системі, описаній у заявках 08/144 901 і 08/316 155 на патент США. Слід відзначити підвищення гнучкості ресурсів базової станції, що можна бачити, порівнюючи фіг. 7 та фіг. 8. Якщо (фіг. 7) ба зова станція 362 перевантажена до такої міри, що кількість сигналів, що надхо дять, перевершує кількість демодуляторів, що можуть їх обробити, той факт, що станція 364 завантажена мало і має вільні демоду лятори, не може допомогти станції 362. У системі згідно з фіг. 8, однак, кожний демодулятор може призначатись будь-якому з секторів, що дозволяє задовольняти ресур сами найбільш заванта жений сектор. Згідно з винаходом, існує тільки одна центральна станція у центральному вузлі 40 (фіг. 2). Таким чином, усі демодулятори систе ми можна розглядати безпосередньо пов'язаними подібно до секторів стандартної системи. Сигнали від будьякого РАП можуть бути об'єднані перед декодуванням з сигналом від будь-якого іншого РАП, що поліпшує роботу системи. У ідеальному випадку селекція не виконується і м'якіша передача зв'язку може здійснюватись по усій зоні обслуговування системи. Проте для спрощення структури кількість взаємозв'язків між демодуляторами можна зменшити і застосувати селекцію при об'єднанні сигналів. Крім переваг, які дає м'якіша передача зв'язку, дуже велика гнучкість такої систе ми спрощує початкове розгортання і подальше внесення змін у систему згідно з змінами умов роботи. Гнучкість зумовлюється тим, що у описаній системі кожний РАП може працювати або як елемент розподіленої антени, або як окремий сектор, і зміна ролі РАП здійснюється швидко, просто і дистанційно з центрального вузла 40. Фіг. 9 А містить спектральне розподілення у кабелі прямого шляху МКТ. Оскільки звичайні телевізійні канали мають смугу ши риною 6 МГц, у бажаному втіленні у сигналах прямого каналу використовують ся частотні блоки шириною 6 МГц. Крім того, ти пова базова станція має три сектори, і тому для уз годження з устаткуванням звичайних стільникових систем, частоти призначаються з урахуванням трьох пов'язаних секторів. Однак, згідно з винаходом припускаються інші спектри і призначення ресур сів. На фіг. 9А наведено частотні характеристики для трьох секторів системи з ПДКУ. У бажаному вті ленні кожному з секторів призначено приблизно 1,25 МГц. На фіг. 9 А також наведено еталонний сигнал РАП, що передається будь-яким з трьох секто рів. Вузькосмуговий ФПХ у РАП може відфільтрувати побічні частоти ПДКУ і еталонний сигнал РАП досить ефективно, щоб забезпечити передачу до віддаленого абонента тільки бажаного сигналу. Фіг. 9Б містить спектральне розподілення у кабелі прямого шляху МКТ. Сигнали зворотного каналу зазнають менши х обмежень при призначенні частотної смуги. Згідно з фіг. 9Б вважається, що що найменше деякі РАП мають анте ни для альфа- і бе та-сигналів (див. фіг. 4), і то му для обслуговування трьох секторів для зворотного каналу потрібна ширша смуга. Згідно з фіг. 9Б, як можна бачити, їй призначено 13 МГц разом з частиною спектру для унікального еталонного сигналу, який визначає коефіцієнт передачі зворотного шляху. Як показано на фіг. 9А, Б, сигнали секто рів частотно мультиплексовано у кабель. РАП може бути інструктований через еталонний сигнал РАП настроїти КАФ та ким чином, щоб РАП передавав сигнал сектора 1, і надсилав прийнятий сигнал на частотах альфа- і бета-сигналів секто ра 1. Другий РАП, що має суміжну зону обслуговування, може одержати інструкцію також приймати і передавати 11 37290 сигнали секто ра 1, тобто другий РАП поводиться як ще один елемент розподіленої анте ни сектора 1. Не має значення, чи з'єднані ці РАП з одним або різними оптоелектронними вузлами (наприклад, 20А - 203 на фіг. 2). У цьому ви падку віддалений абонент, що пе реходить з зони обслуговування першого РАП до зони другого, взагалі не зазнає передачі зв'язку. Як для абонента, так і для базової станції така ситуація сприймається просто як поява ще одного шляху сигналу. З другого боку, другий РАП через еталонний сигнал РАП може бути інструктований настроїти КАФ та ким чином, щоб РАП передавав сигнал сектора 1, і надсилав прийнятий сигнал на частотах альфа- і бета-сигналів секто ра 1. У цьому випадку абонент, переходячи з зони обслуговування першого РАП до зони другого зазнає передачі зв'язку, як це описано вище. За лежно від конфі гурації базової станції, відбувається м'яка або м'якіша передача зв'язку, які сприймається віддаленим абонентом як однакові процедури. Фіг. 10 містить блок-схе му базової станції 44 фіг. 2 згідно з винаходом. Базова станція 44 одержує сигнали від конверторів 18А - 183 оптичних сигналів у електричні. У загальному випадку ці конвертори можуть забезпечувати сигналами будь-який з секто рів базової станції 44. Подвійний банк перетворювачів 410А - 410Л, що знижують частоту, з'єднанням 414 з'єднано з оптоелектричними перетворювачами 18А -183. Банк 410А 410Л є подвійним тому, що окремі оптичні волокна можуть проводити прийняті як альфа, так і бетасигнали. Якщо у системі є РАП, що не здійснюють диверсифікованого прийому, деякі з перетворювачів 410А - 410Л можуть не бути подвійними. У загальному випадку елемент 414 з'єднання може з'єднувати будь-який з оптоелектрич'них перетворювачів 18А - 183 з будь-яким з перетворювачів 410А -410Л і може об'єднувати сигнали від двох або більше перетворювачів 18А - 183. Як показує фіг. 9Б, що при перетворенні кожного сигналу від кожного з секторів у загальну проміжну частоту не існує взаємно однозначної відповідності між перетворювачами 410А - 410Л і перетворювачами 18А - 183. Наприклад, якщо оптоелектричний перетворювач 18А забезпечує сигналами три секто ри з фіг. 9Б, необхідно мати шість окремих перетворювачів з зниженням частоти для прийому сигналів 1 -альфа, 1 -бета, 2-альфа, 2-бета, 3-альфа, 3-бета від перетворювача 18А. У бажаному вті ленні, якщо перетво рювачі 18А, 18Б обидва проводять альфа-сигнали сектора 1 однакової частоти, ці сигнали можуть бути об'єднані у з'єднанні 414 перед зниженням частоти. У загальному ви падку те, що сигнали певного з секторів базової станції 44 мають першу частоту у першому з волокон кабеля МКТ, не означає, що інші во локна несуть сигнали то го ж сектора на першій частоті. Тому навіть у системах всього з трьома секторами з здатністю об'єднувати РЧ сигнали у з'єднанні 414, потрібне відношення кількості секторів до кількості перетворювачів у подвійному банку перевищує 2:1 . Наприклад, якщо оптоелектричний перетворювач 18А проводить сигнали трьох секто рів фіг. 9Б, з центральною частотою 12 МГц, а перетворювач 18Б - такі ж сигнали з центральною частотою 25 МГц, то для обслуговування цих тр ьох секторів потрібні 12 перетворювачів, знижуючих частоту. Подвійний банк перетворювачів 410А - 410Л виконує перетворення вхідних сигналів з зниженням частоти і фільтрування. У бажаному вті ленні винаходу перетворювачі 410А - 410Л знижують частоту до однієї й тієї проміжної. Паралельно до подвійного банку перетворювачів 410А - 410Л підключено процесори 412А 412К еталонних сигналів, що визначають коефіцієнт передачі зворотного шляху. Еталонний сигнал від кожного РАП має бути аналізований у базовій станції 44 окремо, і тому кількість процесорів 412А - 412 К не визначається кількістю перетворювачів. У бажаному вті ленні еталонний сигнал, що визначає коефіцієнт передачі зворотного шляху, не ви магає безперервного моніторингу, а може вимірюватись через інтервали. Наприклад, кожний з процесорів 412А - 412К може вести моніторинг 12 різних еталонних сигналів, що визначають коефіцієнт передачі зворотного шля ху, шляхом послідовного вимірювання рівнів цих сигналів. У такому випадку кількість процесорів еталонних сигналів, що визначають коефіцієнт передачі зворотного шляху, можна зменши ти. Процесори 412А - 412К виміряють амплітуду кожного з еталонних сигналів від кожної РАП. Ці вимірювання дають відносні оцінки амплітуд сигналів зворотного шля ху. Результати ви мірювань надхо дять до контролера 430 зв'язку МКТ че рез з'єднання 408. Зворотне повідомлення у вигляді еталонного сигналу РАП надходить до РАП, і примушує РАП знизити або підвищити рівень сигналів, які воно надсилає зворотним шляхом. Отже, рівень вихідних сигналів кожного РАП регулюється таким чином, що їх можна належним чином об'єднувати у МКТ або базовій станції 44. Процесори 412А - 412К еталонних сигналів, що визначають коефіцієнт передачі зворотного шляху, можуть також виконувати інші функції, наприклад, моніторинг повідомлень від РАП або аварійних. З'єднання 408 пов'язує подвійний банк перетворювачів 410А - 410Л з подвійним банком суматорів, які складають вихідні сигнали конверторів 410А - 410Л, які надійшли від одного сектора. Таким чином, центральний вузол не тільки керує відносними рівнями потужності сигналів зворотного шля ху для кожної РАП, щоб уможливити ефективне об'єднання, але й регулює абсолютний рівень цих сигналів. Як уже відзначалось, однією з специфічних проблем, пов'язаних з використанням МКТ для передачі приватних сигналів, є наявність сторонніх сигналів. У бажаному вті ленні система з ПДКУ не чутлива до шкідливої дії порівняно великих перешкод у безпровідних зв'язках і сторонніх сигналів у МКТ завдяки широкій смузі частот інформаційного сигналу і керуванню потужності у зворотному каналі. Це керуван ня потужністю дуже зменшує динамічний діапазон сигналів, що надходять до РАП, тому що кожний віддалений абонент вста новлює для себе таку потужність передачі, що при прийоми у РАП вони мають однаковий рівень незалежно від відстані до абонента. Завдяки вузькому динамічному діапазону сигналам зворотного шляху у кабелі можна надавати постійну велику потужність, яка перевершує потужність сторонніх сигналів. 12 37290 Однак, важливо, щоб рі вень сигналів зво ротного шляху був досить низьким, щоб не виникло перевантаження електрооптичних перетворювачів і іншо го обладнання шляху і щоб він не заважав іншим сигналам зворотного шля ху, наприклад, сигналам від користувачів те левізійної системи, пов'язаним з платним телемовленням. Саме з цих причин центральний вузол має регулювати абсолютний рівень сигналів. Структура фіг. 10 дозволяє керува ти абсолютним рівнем багатьма способами. Слід відзначити, що еталонний сигнал, що визначає коефіцієнт передачі зворотного шляху, досягає центрального вуз ла 40, маючи однаковий рівень незалежно від фактичного рівня сигналу, прийнятого відповідною РАП. Отже для визначення повної потужності необхідно застосувати інший спосіб, наприклад, такий, за яким кожний активний перетворювач 410А - 410Л подвійного банку сповіщає про абсолютний рівень сигналу, який він приймає, контролер 430 зв'язків МКТ. Цей контролер у відповідь може надіслати до кожного РАП команду знизити або підвищити рівень сигналу зворотного шляху. Вихідні сигнали банку суматорів надхо дять до відповідних автоматичних регулю-вачів 406А 406І підсилення (АРП), кожний з котрих забезпечує, наприклад, фільтрування сигналів проміжної частоти. У ба жаному вті ленні перетворювачі 410А - 41 ОЛ виробляють аналогові сигнали, які об'єднуються аналоговими суматорами 407А -407І. Об'єднані аналогові сигнали перетворюються у цифрові у бан ку АРП 406А - 406І. Для нормальної роботи АЦП необхідно точно регулювати амплітуду їх вхідних сигналів. Функцією АРП 406А - 406І є вста новлення такого рівня вхідних аналогових сигналів АЦП, що не впливає на роботу контурів керування потужністю у МКТ. У іншому ва ріанті АЦП можна розмістити у бан ку 400 модемів. З'єднання 404 з'єднує банк 400 модемів з АРП 406А - 406І. Банк 400 містить цифрові блоки ,402, кожен з яких містить групу канальних модемів. Канальні модеми виконують функції демодуляторів (подібно до демодуляторів 204А 204Л фіг. 8). У загальному випадку кожний з демодуляторів банку 400 може бути призначений для будь-якого з сигналів секторів, що надхо дять від будь-якого з АРП 406А - 406І. Фіг. 12 містить часткову блок-схему одного з канальних модемів блоку 402. Цей модем використовується для обробки сигналів, що відповідають одному віддаленому абоненту. У бажаному втіленні кожен з демодуляторів 204А - 204Л може бути призначений демодулювати один багатошляховий сигнал від будь-якого з з'єднаних з'єднанням 404 АРП 406А - 406І. Таким чином, більш як один з демодуляторів 204А - 204Л можуть бути призначені для одного АРП банку 406А - 406І, якщо якщо від цього АРП надходить більш, як один якісний багатошляховий сигнал. Також один з демодуляторів 204А - 204Л може бути призначений до іншого АРП, якщо сигнал від абонента пройшов че рез МКТ дво ма різними шляхами. Слід відзначити, що вихідні сигнали демодуляторів 204А - 204Л об'єднуються у об'єднувачі 208 символів з ва гами згідно з якістю сигналів, незалежно від яких банк 406А 406І АРП постачає сигнали, і тому не виникає пот реби у процедурі селекції для виконання м'якої передачі зв'язку по усій зоні обслуговування. На фіг. 12 наведено також модулюючу частину канального модема блоку 402. У бажаному вті ленні сигнал прямого каналу зв'язку перед передачею модулюється пілотною послідовністю. Якщо та кий сигнал має бути переданий двома елементами РАП, які працюють з різними зсувами пілот-сигналу, то цей сигнал необхідно створювати у двох різних модуля торах. Контролер 237 банку модемів виконує подібні функції керування через шину, що з'єднує з контролером 200 фіг. 8. З'єднуючі елементи 414, 404, 426, 408 можуть з'єднувати будь-які виходи з будь-якими входами. У дуже великих системах фактична кількість зв'язків може обмежуватись з фінансових, геометричних або інших практичних міркувань. Наприклад, може виявитись вигідним обмежити кількість з'єднань таким чином, щоб перша група оптоелектричних перетворювачів могла бути з'єднана з першою (але не з другою) групою групою знижуючих частоту перетворювачів. Внутрішні зв'язки у з'єднаннях 414, 404, 426, 408 можуть бути динамічно керованими від контролера 430 зв'язків МКТ. Сигнали, призначені для передачі, формуються у цифрових блоках 402. Для кожного з активних секто рів у з'єднання 404 від блоків 402 надхо дить повний комплект сигналів, включаючи пілот-сигнали каналу, синхронізуючі, пейджерні і усі інфор маційні сигнали (тобто повідомлення для абонента). Кожний з сигналів секторів від модемів 400 перетворюється щонайменше одним з перетворювачів 422А - 422Н з підвищенням частоти. Якщо цей сигнал має бути переданий на різних частотах, він надхо дить до більш, як одного з перетворювачів 422А - 422Н. Кожний сигнал сектора, що надсилається до одного або більше генераторів еталонних сигналів РАП, супроводжується цифровим показником бажаного рівня. Кожна лінія зв'язку, яка несе сигнал сектора, має також нести відповідний еталонний сигнал РАП, який несе інформацію для керування потужністю у прямому і зворотному шля хах, а також іншу керуючу інформацію для РАП. Якщо у ін шо му вті ленні ци фро ві бло ки 402 не ге нерують ба жаного по казника потужності передачі, пе ред пе ретво рюва чами 422 А 422Н можуть бути вста новле ні схе ми моніторингу по туж ності . Сигнал про ви міряний ними рівень по туж ності мо же бути на дісланий без посередн ьо або непрямим шля хом до ві дповідного ге нератора 422 А – 420 І е талон ни х си гналів РАП , який ви користає цей сигнал так, як він використо вує по казник ба жаної потуж ності у бажаному вті лен ні. Якщо три різні сигнали секторів надсилаються однією лінією зв'язку до РАП (фіг. 9А), до одного генератора еталонних сигналів надходять три різні цифрові показники бажаного рівня передачі. Кожна з РАП, що ведуть моніторинг цієї лінії, має бути забезпечена також інформацією для керування потужністю у зворотному шляху. Цю інформацію постачає контролер 430 зв'язків МКТ, який формує її, використовуючи дані від процесорів 412А - 412К еталонних сигналів коефіцієнта передачі. З'єднуючий елемент 426 має бути здатний надсилати сигнали від перетворювачів 422А 13 37290 422Н, що підвищують частоту, до одного або більше оптоелектричних перетворювачів 16А - 163. Якщо по кількох лініях у МКТ проходить одна й та ж секторна інформація, той же підви щуючий частоту перетворювач надсилає інфор мацію до кількох електрооптичних перетворювачів 16А - 163. Якщо інформація для кількох секторів проходить по одній лінії (фіг. 9 А), до одного електрооптичного перетворювача надхо дить інфор мація від кількох підвищуючих частоту перетворювачів 422А - 422Н. З'єднання 426 також забезпечує проходження відповідного еталонного сигналу РАП від одного з генераторів 422А – 420І еталонних сигналів РАП до кожного з електрооптичних перетворювачів 16А 163. Якщо еталонний сигнал РАП має досить широку смугу частот для керування потужністю і інших функцій керування, цей сигнал може бути надісланий до кількох електрооптичних перетворювачів 16А - 163. У іншому варіанті для кожної лінії може бути зформований окремий еталонний сигнал РАП, навіть якщо через лінії проходить один секторний сигнал. У цьому випадку еталонний сигнал РАП несе тільки керуючу інформацію для цієї РАП. У прямому шляху МКТ також необхідно керува ти абсолютним рівнем. Типові телевізійні сигнали прямого шляху мають 112дБ/Гц. У бажаному вті ленні рівень сигналів ПДКУ має бути знижений приблизно на 10 дБ, щоб уникнути впливу цих сигналів на сигнали МКТ. З'єднуючий елемент 414 забезпечує також зв'язок оптоелектричних перетворювачів 18А - 183 з процесором 416 сторонніх сигналів. Функції цього процесора описано далі. У ти повій макростільниковій систе мі базові стан ції не мають прямого зв'яз ку з ККТМ. Звичайно центральний процесор систе ми кер ує базовими стан ціями. Наприклад, (фі г. 7) контролер 370 систе ми забезпечує се лекційний процес для базови х стан цій 362, 364, 368. У бажаному втіленні цей процес можна вилучи ти , але існують інші функ ції контролера систе ми, які не можна передати цен тральному вуз лу 40. Наприклад, у системі з ПДКУ, що відповідає стан дарту TIA/EIA/IS-95 (а бо просто IS-95), во кодовані голосові да ні фор муються у кадри. Кон тролер 370 системи забезпечує двосто роннє пе ретво рення між сигналам ККТМ з імпульсно-кодовою модуля цією і кадрами системи ПДКУ. У бажаному вті ленні система забезпечує обробку як голосових, так і інфор маційних даних від віддалених абонентів. Мо же виявитись потреба, щоб центральний вузол обробляв різні інформаційні дані, а також виконував функції, пов'язані з оплатою послуг, і інші функції обробки викликів, як це звичайно робить контролер макростільни-кової системи. Центральний вузол також може мати у складі комута тор для зв'язку між МКТ і ККТМ. Винаходом також передбачені інші структури і призначення функцій. Наприклад, традиційні функції контролера системи можуть бути призначені окремому системному контролеру а центральний вузол може розглядатись як одна з базових станцій розширеної системи. Як уже відзначалось, еталонний сигнал РАП використо вується РАП трояко. По-перше, цей сиг нал несе цифрову інформацію до РАП. По-друге, він використовується як еталон частоти у РАП. Потретє, він є еталоном, відносно якого вимірюється коефіцієнт передачі у МКТ. Одним з засобів, що уможливлює виконання усіх цих функцій, є амплітудна модуля ція (AM) еталонного сигналу РАП. У бажаному вті ленні кожний РАП системи має власну унікальну адресу. У зви чайних умовах необхідно тільки, щоб кожний РАП, що веде моніторинг загального еталонного сигналу РАП, мав унікальну адресу і цю адресу можна було передавати по усій систе мі. У більш гнучкому варіанті ці адреси можуть програмно призначатись центральним вузлом, але вони можуть бути фіксованими схемно. Формат сигналів РАП може передбачати можливість моніторингу еталонного сигналу РАП, адресованого саме їй. Якщо адреса, передана у еталонному сигналі РАП, збігається з адресою РАП або універсальною адресою, РАП де кодує повідомлення і діє згідно з ним. Якщо такого збігу нема, РАП ігнорує повідомлення, але продовжує моніторинг. Швидкість передачі еталонного сигналу РАП складає приблизно 300 біт/с, але для нього можна використовувати стандартний модем з швидкістю передачі 9,6 кбіт/с або 19,2 кбіт/с. Еталонний сигнал РАП використо вується також як еталон часто ти для КАФ у РАП, а також для таймера РАП, який сінхронізує передачу да них. Оскільки це AM си гнал, його частота постійна і він може використовуватись як еталон майже безпосередньо. Крім того, щоб запобігти фа зовим і амплітудним спотворенням, модуля ція має бути швидкою і не мати постійної складової. Можна використовува ти модуляцію з розщепленням фази або манчестерську, які утворюють "М"-подібну спектральну щільність, і, таким чином, можливі спотворення будуть віддалені від несучої. Нарешті, еталонний сигнал РАП визначає коефіцієнт передачі у МКТ від центрального вуз ла 40 і кожної РАП. AM сигнал може використовуватись як еталон амплітуди, якщо схе му модуля тора побудо вано належним чином і вона забезпечує, наприклад, малу гли бину модуля ції. Цифрові дані, що передаються, мають мати рівні кількості логічних 1 і 0 на відносно коротких інтервалах. Необхідно також, щоб РАП усереднював потужність еталонного сигналу РАП за певний період. Як уже відзначалось, потужність складеного сигналу прямому каналу ПДКУ, що проходить прямим шляхом МКТ, є функцією кількості і відносної потужності сигналів, які об'єднують ся, утворюючи цей складений сигнал. З зазначених вище причин важливо, щоб відносна потужність передачі кожного РАП належним чином регулювалась, щоб межі РАП передачі зв'язку зберігали своє положення. Спосіб і пристрій для створення сигналу, що визначає підсилення і відповідну силу складеного сигналу, описано у заявці 08/525 899 на патент США від 8.09.1995. Кожному сектору системи відповідає незалежний складений сигнал, сила якого залежить від кількості і відносної сили кожного з сигналів, що передаються. Кожний модулятор блоку 402 створює вихідний цифровий сигнал, який додається до інши х сигналів-показників, вироблених модуляторами для цього сектора. У такий спосіб можна зформувати сигнал-показник рівня передачі кож 14 37290 ного складеного сигналу сектора, створеного банком 400 модемів, згідно з вже згаданою заявкою 08/525 899. Еталонний сигнал РАП завжди передається центральним вузлом на фіксованому рівні, незалежно від бажаної вихідної потужності. Цей сигнал може використо вува тись як приблизна оцінка коефіцієнта передачі у МКТ. Ко ли РАП веде передачу (фіг. 3), ви хідна потужність вимірюється вимірювачем 90 потужності і результат передається назад до мікропроцесора 88 РАП. Мікропроцесор 88 порівнює результат ви мірювання потужності з рівнем, одержаним у еталонному сигналі РАП у цифровій формі. Це порівняння дає сигнал різниці, що визначає величину, на яку необхідно знизити або підвищи ти вихідну потужність. Цей контур керування потужністю характеризується першою константою часу, яка визначає швидкість, з якою команди керування потужністю приймаються від центрального вуз ла 40 у еталонному сигналі РАП. Відзначимо, що кожна РАП, що випромінює сигнал цього сектора, одержує той же самий показник потужності передачі у ци фровій складовій еталонного сигналу РАП. Оскільки контури керуван ня потужністю мають підтримува ти вихідну потужність у межах ± 1дБ від бажаного рівня, перший контур може працювати досить повільно, щоб задовольнити цій ви мозі. Керування потужністю у першо му контурі здійснюється мікропроцесором 88, який також виконує моніторинг абсолютного рівня еталонного сигналу РАП. Вар то відзначити, що коефіцієнти передачі сигналу на шляха х між центральним вузлом 40 і РАП незалежні і можуть відрізнятися один від одного. Без другого контура зміна умов передачі у шля ху між центральним вузлом 40 і РАП призведе до зміни вихідної потужності ГРМ, до ки перший контур не поверне її до бажаного рівня. Призначенням другого контура керування потужністю РАП є компенсування змін коефіцієнтів передачі МКТ. Процесор 84 еталонного сигналу РАП веде моніторинг абсолютного рівня цього сигналу і порівнює його з фіксованим еталонним значенням. Результат цього порівняння додається до такого ж результата першо го контура, і сумарний сигнал надсилається до АРП 72, який вста новлює вихідну потужність РАП. Таким чином, зміна коефіцієнта передачі у МКТ викликає відповідну зміну коефіцієнта підсилення у РАП. У інших вті леннях може бути засто сований тільки один з описаних способів, що відповідає винаходу. З наведеного опису очевидно, що чим ближче еталонний сигнал РАП відповідає фактичному коефіцієнту передачі зміні коефіцієнта передачі у МКТ, тим точніше працює система керуван ня потужністю зворотного шляху. Зміни коефіцієнта передачі у МКТ можуть сильно залежати від частоти, і, та ким чином, чим більший частотний зсув між сигналом сектора і відповідним еталонним сигналом РАП, тим менша кореляція між коефіцієнтом передачі для сигналу сектора і коефіцієнтом передачі для еталонного сигналу РАП. Наприклад, амплітуда (фіг. 9 А) еталонного сигналу РАП є досить задовільним показником амплітуди для сектора 3, але є менш точною оцінкою амплітуди сектора 1. З фіг. 9А можна також бачити, що еталонний сигнал РАП займає смугу частот, яку можна використовува ти для інших потреб, наприклад, для сигналу іншого сектора або телевізійного. Одним з способів тісніше наблизити амплітудні характеристи ки еталонного сигналу РАП і сигналу сектора є передача еталонного сигналу РАП у смузі 1,25 МГц секторного сигналу з ПДКУ. На фіг. 11 показане розміщення еталонного сигналу РАП у центрі секторного сигналу з ПДКУ. Таке розміщення не дуже впливає на роботу системи. Розши рююча ПШ послідовність, що ви користовується абонентськими пристроями для демодулювання секторного сигналу, забезпечує значне підсилення сигналу з ПДКУ відносно "заважаючого" еталонного сигналу РАП. Розміщення еталонного сигналу РАП у центрі секторного сигналу з ПДКУ дає додаткові переваги порівняно з іншими способами включення у секторний сигнал. У абонентському пристрої сигнал з ПДКУ перетворюється до сигналу базової частоти таким чином, центральна РЧ накладається на частоту ба зової смуги, що відповідає постійному струму, і ця частота блокується у аналогових схе мах перед АЦП, що забезпечує додаткове придушення цієї частоти. Подібний спосіб може бути засто сований для еталонного сигналу для коефіцієнта передачі, але він у цьому ви падку не є найкращім, оскільки кількість таких сигналів для кожного сектора може бути досить великою і створити значні перешкоди. Як уже відзначалось, умови передачі РЧ у МКТ до сить важкі. МКТ дуже вразлива до сторонніх сигналів, які можуть змінюватись у часі. Природні властивості сигналів з ПДКУ захищають їх від вузькосмугових пе решкод, але наявність вузькосмугових перешкод у спектрі секторних сигналів зворотного шляху може трохи погірши ти роботу системи. У схемах для ПДКУ існує засіб виявлення причин погіршення, а саме, процесор 416 (фіг. ,10) сторонніх сигналів. Цей процесор перевіряє весь спектр, що використовуєть ся, вузькосмуговими кроками і створює базу даних про джерела сторонніх сигналів. Наприклад, процесор 416 аналізує зразки спектру шириною 125 кГц кожні 10 мс. Якщо енергія у цій смузі перевищує природне значення для сигналу з ПДКУ (яке є відносно малим внаслідок широкосмуговості сигналу з ПДКУ і досить вузької смуги зразка), процесор 416 реєструє перешкоду на цій частоті. Якщо сумарна енергія перешкод для секторного сигналу перевищує поріг, частота цього сигналу може бути змінена. Використовуючи дані про перешкоді з бази даних процесора 416 можна обрати найвільніший від перешкод спектр. Перехід до нової частоти легко здійснити, не перериваючи зв'язку між РАП і центральним вузлом. Ті РАП, що зазнають перешкод їх сигналам, одержують у еталонному сигналі РАП повідомлення з інструкцією перейти на нову частоту. Наприклад, КАФ 112 (фіг. 4) або КАФ 138, або обидва можуть бути перепрограмовані на іншу частоту. Один з подвійних банків перетворювачів 410А - 410Л у центральному вуз лі 40 одержують команду обробляти сигнали, що надходять на іншій частоті. Усі операції виконуються авто матично, без втручання оператора. 15 37290 Описана систе ма має багато переваг завдяки її гнучкості. Коли система розгортається вперше, кількість користувачів невелика. На цій стадії центральний вузол 40 може мати тільки один сектор ресурсів, тобто усі РАП забезпечують однаковий набір сигналів. Процедура передачі зв'язку для рухомих віддалених абонентів не виконується. З зростанням кількості абонентів у базовій станції створюється новий сектор ресур сів, для якого потрібні, наприклад, додаткові цифрові блоки і перетворювачі як знижуючі, так і підвищуючі частоту. Після створення у базовій станції нового сектора центральний вузол може запрограмувати роботу кількох РАП з сигналами нового сектора. З подальшим збільшенням кількості абонентів до базової станції додаються нові ресурси і нові РАП дистанційно програмуються для роботи з ними, причому додання нових секторів не потребує ніяких фізичних змін у РАП. Та ким чином, після витрат на початкове розгортання, витрати на подальший поступовий розвиток незначні. Легкість, з якою РАП перепрограмуються для роботи у складі нового сектора, дає переваги при унесенні змін у систе му. Припустімо, наприклад, що міська зона нормально обслуговується п'ятьма РАП, які передають однаковий набір сигналів і є розподіленими антенами одного сектора. У цій невеликій зоні обслуговування кількість абонентів, що ви магають обслуговування може раптово зрости втричі, внаслідок, наприклад, автомобільної аварії, яка може зупинити до рожній рух. Базовій станції стає відомо про зростання кількості вимог у певному секто рі і воне перепрограмовує один або більше РАП з цих п'яти, щоб вони утворили новий сектор, і, таким чином збільшує загальну кількість телефонних викликів зони, які можуть обслуговуватись одночасно. У найбільш критичних випадках кожний з наявних РАП може бути перетворений у сектор. Ці операції базова станція виконує майже миттєво без втручання оператора, Підвищена гнучкість, яка є особливістю винаходу, створює численні можливості. Прикладом може бути спорадичне використання, що має місце, наприклад, на стадіоні, який може бути заповнений протягом кількох годин кілька разів на тиждень. У звичайній системі з постійною структурою більшість ресур сів, необхідних під час спортивних подій, залишатиметься невикористаною решту часу. Згідно з винаходом, ресур си, що за потребою призначаються для обслуговування стадіону, можуть бути потім використані для інших потреб, що знижує вартість системи і підвищує її продуктивність. Такі призначення можуть бути програмовані заздалегідь для запланованих подій або автоматично у несподіваних випадках. Згідно з винаходом можливі різні варіанти системи. Наприклад, процесор 70 проміжної частоти (фі г. 3) може мати постійний елемент затримки для створення диверсифікованих сигналів, що можуть окремо демодулюватись у абонентському пристрої. У іншо му втіленні через прямий шлях МКТ можуть проходити кілька версій секторного сигналу. Вер сії можуть затримува тись у процесорі центрального вузла або у іншому вузлі систе ми, і РАП як елементи загальної розподіленої антени можуть передавати різні версії з різними затримками, не створюючи власної затримки. Іншим варіантом підвищення інфор маційної ємкості сигналу зворотного каналу є перетворення частоти у вуз лах 20А - 203. На шляху від РАП до волоконних вузлів частотна смуга зворотних сигналів системи обмежена частотами 5 - 40 МГц, а для прямих сигналів - 54 - 700 МГц. Оптична система фактично здатна передавати сигнали у значно ширшій полосі, наприклад, 200 МГц. Кожний волоконний вузол може використовува ти загальний набір частот для зворотного сигналу від РАП до волоконного вузла. Волоконні вузли можуть мультиплексувати зворотні сигнали по частоті і, створивши групу частот ви ще робочої часто ти частоти прямого каналу, передавати ними сигнал через оптичну мережу до оптоелектронних перетворювачів 18А - 183. Ці перетворювачі можуть знизити частоту цих сигналів перед передачею до базової станції або надіслати їх до знижуючих перетворювачів 410А - 410Л для відповідного перетворення. У початковому застосуванні винаходу може виявититись економічно вигідним побудувати схеми центрального вуз ла 40 на базі схем існуючої макростільникової системи. Типова нерухо ма макростільникова базова станція має три різні сектори. М'якіша передача зв'язку з об'єднанням здійснюється між секторами однієї базової станції, м'я ка передача з селекцією - між одним з секто рів і сектором іншої базової станції. Для використання існуючого обладнання структура центрального вуз ла може передбачати потроєння наборів секторів. Передача зв'язку між секторами потроєного набору буде м'якішою, а передача зв'язку між нез'єднаним секторами наборів м'якою. Перевагою такої системи є можливість програмувати фі зично близькі один до одного РАП відповідно до трьох секторів потроєного набору секторів, щоб збільшити кількість м'якіших передач зв'язку у системі, зменшуючи кількість м'яких. Таким чином використовуються гнучкість і інші переваги системи з одночасним зниженням вартості засто сування. Можливі численні модифікації системи згідно з винаходом, включаючи прості структур ні зміни. Наведений опис бажаних вті лень дає змогу будь-якому фа хівцю у даній області застосувати винахід і, якщо потрібно, модифі кувати його, дотримуючись концепцій і принципів, на яких його засновано. Описані втілення не обмежують об'єм винаходу, який визначено у Формулі. Скорочення у тексті ПДКУ - паралельний доступ з кодовим ущільненням каналів; ПШ - псевдошумовий; AM - амплітудна модуляція; ЧМ - частотна модуляція; ЧПК - частота помилок у кадрі; КТ - контролер трансівера; МКТ - мережа кабельного те лебачення; РАП - ра діоантенний пристпій; ККТМ - комунальна комутаторна телефонна мережа; КАФ - контур автопідстроювання фази; ППЧ - процесор проміжної частоти; ФПХ - фільтр поверхневої хви лі; АРП - авто матичний регулювач підсилення; ЕСКП - еталонний сигнал коефіцієнта передачі. 16 37290 Фіг. 1 Фіг. 2 17 37290 Фіг. 3 Фіг. 4 18 37290 Фіг. 5 Фіг. 6 19 37290 Фіг. 7 Фіг. 8 20 37290 Фіг. 9А Фіг. 9Б Фіг. 10 21 37290 Фіг. 11 Фіг. 12 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 22
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for communication providing in communication system service zone
Автори англійськоюDIN Richard F., WIVER Lindzi A. Junior, WITLEY Charles E., III
Назва патенту російськоюУстройство для обеспечения связи в зоне обслуживания системы связи
Автори російськоюДИН Ричард Ф., ВИВЕР Линдзи А., Младший, Витли Чарльз Е., ИИИ
МПК / Мітки
МПК: H04Q 7/36, H04Q 7/30, H04N 7/173
Мітки: системі, зони, зв'язку, забезпечення, пристрій, обслуговування
Код посилання
<a href="https://ua.patents.su/22-37290-pristrijj-dlya-zabezpechennya-zvyazku-u-zoni-obslugovuvannya-sistemi-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Пристрій для забезпечення зв’язку у зоні обслуговування системи зв’язку</a>
Головний лінійний пристрій, пристрій обслуговування групових ліній і спосіб керування пристроєм обслуговування групових ліній
Номер патенту: 32540
Опубліковано: 15.02.2001
Автори: Хааг Кенет Вільсон, Петерс Джім Дюард, Лью Шен-Чанг
МПК: H04M 13/00, H04Q 11/04, H04L 12/66
Мітки: керування, обслуговування, спосіб, групових, ліній, пристроєм, головний, лінійний, пристрій
Текст:
...присвоенный номер для управляющих ячеек типа данных используется для обеспечения, что сообщения прибывают в правильной последовательности, и что сообщения не потеряны при передаче Адрес устройства, используемый в заголовке, идентифицирует периферийное устройство в дистанционной линейной группе, которой соответствующее сообщение данных должно быть послано 32540 Например, адрес может указывать HLSC 130-А один из линейных блоков или модуль...
Програмний пристрій приоритетного обслуговування запитів
Номер патенту: 24127
Опубліковано: 30.10.1998
Автори: Дудник Леонід Олексійович, Горша Леонід Юхимович, Гриценко Володимир Ілліч, Соломонов Володимир Володимирович, Корнієнко Григорій Іванович
Мітки: пристрій, програмний, обслуговування, запитів, приоритетного
Текст:
...входа 8 на счетный вход счетчика 3, содержимое которого увепичивается на 1. Этим на(5 чинается исполнение второго шага микропрограммы обслуживания. Сигнал разрешения обслуживания появляется на выходе 13 согласно программе 2. Исполнение этого шага ничем не от20 личается от предыдущего. на втором шаге - заявка № 3 (нулевой потенциал на выходе 13,). На третьем шаге вырабатывается сигнал, который вновь устанавливает счетчик 3 в состояние 01, а в...
Багатоканальний пристрій для обслуговування запитів
Номер патенту: 19934
Опубліковано: 25.12.1997
Автор: Бантюков Євгеній Миколаєвич
МПК: G06F 9/46, G06F 13/14
Мітки: пристрій, обслуговування, запитів, багатоканальний
Текст:
...поэтому на первых выходах каналов 2-1, 2-2 2-К и на выходных шинах 4-1, 4-2 4-К находятся нулевые сигналы, элементы И 7 каналов запроса открыты. При включении питания триггер 1 может устанавливаться как в единичное, так и в нулевое положение. Допустим, триггер 1 установился в единичное положение, тогда единичный сигнал с его единичного выхода поступает на второй вход канала 2-1 запроса и далее на вход элемента 6 задержки этого канала....
Пристрій для підтримання палива в печі установки для генерування електроенергії ( варіанти), пристрій для забезпечення енергією електрогенеруючої установки, система для забезпечення енергією електрогенеруючої у
Номер патенту: 27965
Опубліковано: 16.10.2000
Автор: ОСТЛІ Л. ДАВІД
МПК: F23B 99/00, F22B 37/00, F23H 3/00, F23G 5/46, F23G 5/14
Мітки: енергією, установки, система, варіанти, електрогенеруючої, підтримання, електроенергії, забезпечення, печі, генерування, пристрій, палива
Текст:
...трубопровода, таким образом нагревая воздух. Нагретый воздух проходит в поперечном направлении через сушильные установки и через сложенные деревья и выходит через каналы у противоположного осно вания констр укций 2 и 3 . Другой способ нагрева сухого воздуха - использование отработанных газов. Поскольку большинство систем не используют отработанные газы ниже температуры около 150°С из-за высоких концентраций кислот при сгорании ископаемого...
Підйомно-транспортний пристрій для обслуговування стелажів
Номер патенту: 5492
Опубліковано: 28.12.1994
Автори: Карлов Антон Георгійович, Першин Сергій Володимирович, Крючков Іван Васильович, Сухоносенко Володимир Борисович, Рисін Ілля Евгенович
МПК: B65G 1/06
Мітки: пристрій, підйомно-транспортний, стелажів, обслуговування
Формула / Реферат:
Подъемно-транспортное устройство для обслуживания стеллажей, содержащее ходовую тележку, на которой смонтированы колонны с вертикальными направляющими. грузоподъемник с телескопическими захватами, установленный в упомянутых направляющих. механизмы передвижения ходовой тележки, вертикального перемещения грузоподъемника и горизонтального перемещения платформ, телескопических захватов и приспособление управления этими механизмами, включающее в...
Попередній патент: Спосіб одержання нанокристалічних порошків дихалькогенідів вольфраму, молібдену, ніобію та їх інтеркалятів
Наступний патент: Система контролю та відеоспостереження
Випадковий патент: Помпа з гідравлічним приводом