Зубчастий механізм вимірювального приладу та електронно-механічний та механічний годинники з таким механізмом












Формула / Реферат
1. Зубчастий механізм вимірювального приладу що містить принаймні корпусну деталь, привід обертання і систему передач, який відрізняється тим, що система передач містить вкладені коаксіальні планетарні передачі, при цьому принаймні одна з них дворядна, з принаймні однією шестірнею-сателітом на кожну з них, а також, одна сонячна або кільцева шестірня кожної з них має сполучення з корпусною деталлю, крім того, як засіб індикації або його безпосередня основа використані принаймні одна рухома шестірня або водило принаймні однієї з цих вкладених планетарних передач принаймні з однієї з її сторін.
2. Зубчастий механізм за п. 1, який відрізняється тим, що принаймні одна планетарна передача має водило, на якому принаймні одна шестірня-сателіт має осьову фіксацію.
3. Зубчастий механізм за будь-яким з пунктів 1-2, який відрізняється тим, що принаймні одна сонячна або кільцева шестірня або водило має осьову фіксацію відносно корпусної деталі.
4. Зубчастий механізм за будь-яким з пунктів 1-3, який відрізняється тим, що принаймні в одній планетарній дворядній передачі принаймні одна пара шестерень-сателітів має сполучення між собою.
5. Зубчастий механізм за будь-яким з пунктів 1-4, який відрізняється тим, що принаймні в одній зовнішній планетарній передачі сонячна шестірня має сполучення з кільцевою шестірнею вкладеної планетарної передачі.
6. Зубчастий механізм за будь-яким з пунктів 1-5, який відрізняється тим, що принаймні в одній зовнішній планетарній передачі сонячна шестірня має сполучення з водилом вкладеної планетарної передачі.
7. Зубчастий механізм за будь-яким з пунктів 1-6, який відрізняється тим, що принаймні в одній зовнішній планетарній передачі водило має сполучення з кільцевою шестірнею вкладеної планетарної передачі.
8. Зубчастий механізм за будь-яким з пунктів 1-7, який відрізняється тим, що принаймні в одній дворядній планетарній передачі шестерні-сателіти попарно мають осьову фіксацію відносно одна одної.
9. Зубчастий механізм за п. 8, який відрізняється тим, що дві кільцеві або сонячні шестерні принаймні однієї з планетарних передач мають сполучення між собою.
10. Зубчастий механізм за п. 8, який відрізняється тим, що принаймні в одній з планетарних передач дві кільцеві або дві сонячні шестерні з вінцевими шестернями на кожній з них мають зв'язок через зубчасті передачі з шестернями, що мають осьову фіксацію відносно корпусної деталі.
11. Зубчастий механізм за п. 8, який відрізняється тим, що принаймні в одній з планетарних передач дві кільцеві або дві сонячні шестерні з вінцевими шестернями на кожній з них мають не менше двох роздільних зубчастих передач з функцією перемикання їх зчеплення в кінематичному зв'язку.
12. Зубчастий механізм за будь-яким з пунктів 1-11, який відрізняється тим, що принаймні одне: водило, кільцева або сонячна шестірня, має вінцеву шестірню, яка входить в зачеплення з принаймні однією шестірнею, що має осьову фіксацію відносно корпусної деталі.
13. Зубчастий механізм за будь-яким з пунктів 1-12, який відрізняється тим, що принаймні одна шестірня або водило має сполучення з приводом обертання.
14. Зубчастий механізм за будь-яким з пунктів 1-13, який відрізняється тим, що принаймні одне сполучення виконане як цілісне або збірне жорстке з'єднання деталей.
15. Зубчастий механізм за будь-яким з пунктів 1-14, який відрізняється тим, що принаймні одне сполучення виконане як проковзне з принаймні заданим моментом зчеплення та/або прослизання.
16. Зубчастий механізм за п. 15, який відрізняється тим, що проковзне сполучення виконано у вигляді фрикційної пружинної гофрованої прокладки, розміщеної в пазах концентричних деталей, при цьому поверхні, що знаходяться у фрикційному контакті, виконані або гладкими, або з рифленнями.
17. Зубчастий механізм за будь-яким з пунктів 1-16, який відрізняється тим, що принаймні на одній рухомій шестірні або водилі, як на основі, нанесений засіб індикації.
18. Зубчастий механізм за будь-яким з пунктів 1-17, який відрізняється тим, що принаймні один циферблат виконаний у вигляді цифр та/або міток шкали поділок на поверхні принаймні однієї з корпусних деталей.
19. Зубчастий механізм за будь-яким з пунктів 1-18, який відрізняється тим, що принаймні одна з його планетарних передач прилягає до корпусної деталі.
20. Зубчастий механізм за будь-яким з пунктів 1-19, який відрізняється тим, що зубці принаймні однієї пари шестерень виконані шевронними або арочними.
21. Зубчастий механізм за будь-яким з пунктів 1-20, який відрізняється тим, що в ньому принаймні одне зубчасте зачеплення складене з підшипникових шестерень у вигляді шестерень з розташованими з двох сторін циліндричними роликами діаметрів, що відповідають діаметру ділильного кола цих шестерень.
22. Зубчастий механізм за пунктом 21, який відрізняється тим, що торцеві поверхні зубців підшипникових шестерень виконані скошеними поверхнями з твірної профілів зубців витягнутої по циліндричній гвинтовій лінії навколо осі шестерень до середини їх зубців, які симетричним витягуванням поширені заглибинами в торцеві коаксіальні ролики до середини заглибини зубців з двох торців, при цьому попарно спряжені в зачепленні торці зубців підшипникових шестерень і заглибини на їх роликах утворені гвинтовими лініями рівного радіуса з кроком, пропорційним передатному відношенню зачеплення.
23. Зубчастий механізм за пунктом 21, який відрізняється тим, що зубці підшипникових шестерень в них виконані за п. 20, при цьому торці зубців виконані за п. 22, або ширина зубців менше заглибин між роликами.
24. Зубчастий механізм за будь-яким з пунктів 21-23, який відрізняється тим, що принаймні одна підшипникова шестірня виконана у вигляді єдиної деталі.
25. Зубчастий механізм за будь-яким з пунктів 21-23, який відрізняється тим, що принаймні одна підшипникова шестірня в ньому виконана складеною з жорстким з'єднанням.
26. Зубчастий механізм за будь-яким з пунктів 1-25, який відрізняється тим, що в центрі планетарного механізму встановлено барабан з принаймні однією прозорою стінкою або знімною кришкою.
27. Електронно-механічний годинник, що містить принаймні корпус, зубчастий механізм, електронний блок, привід та джерело енергії, який відрізняється тим, що в ньому зубчастий механізм виконано відповідно до пунктів 1-26.
28. Електронно-механічний годинник за п. 27, який відрізняється тим, що в його барабані розташоване джерело енергії.
29. Електронно-механічний годинник за п. 27, який відрізняється тим, що в барабані розташований генератор з інерційним сектором, а принаймні одне джерело енергії розміщено або в корпусі годинника та/або в його браслеті.
30. Електронно-механічний годинник за будь-яким з пунктів 27-29, який відрізняється тим, що електричні кола розміщені в барабані та на корпусних елементах, а електронний блок, системи управління та привід розміщені принаймні на одному з корпусних елементів.
31. Електронно-механічний годинник за будь-яким з пунктів 27-30, який відрізняється тим, що як привід встановлено принаймні один кроковий двигун.
32. Електронно-механічний годинник за будь-яким з пунктів 27-31, який відрізняється тим, що на принаймні одному корпусному елементі розташовані кнопки або сенсорні елементи управління годинником.
33. Механічний годинник, що містить принаймні корпус, зубчастий механізм, регулятор ходу та барабан з заводною пружиною, який відрізняється тим, що в ньому зубчастий механізм виконано відповідно до пунктів 1-26, а барабан з закріпленою на його осі заводною пружиною встановлено з осьовою фіксацією відносно корпуса годинника.
34. Механічний годинник за п. 33 який відрізняється тим, що його заводна пружина зовнішнім кінцем має сполучення з сонячною шестірнею конічної планетарної передачі, водило якої має принаймні одну шестірню-сателіт та принаймні одне заскочне зачеплення з зубчастим колесом на корпусній деталі та/або барабані, при цьому її кільцева шестірня жорстко пов'язана з однією з сонячних шестерень або водилом вкладених планетарних передач годинника.
35. Механічний годинник за п. 34, який відрізняється тим, що принаймні одне заскочне зачеплення з корпусною деталлю або поворотним барабаном має важільну конструкцію заскочника з можливістю перемикання зачеплення між зубчастим колесом та шестірнею механізму при заданій силі.
36. Механічний годинник за будь-яким з пунктів 33-35, який відрізняється тим, що на одному водилі розташований принаймні один регулятор ходу цього механізму що має зубчасте зачеплення з рухливою шестірнею або шестірнею що має коаксіально водилу сполучення з корпусною деталлю.
Текст
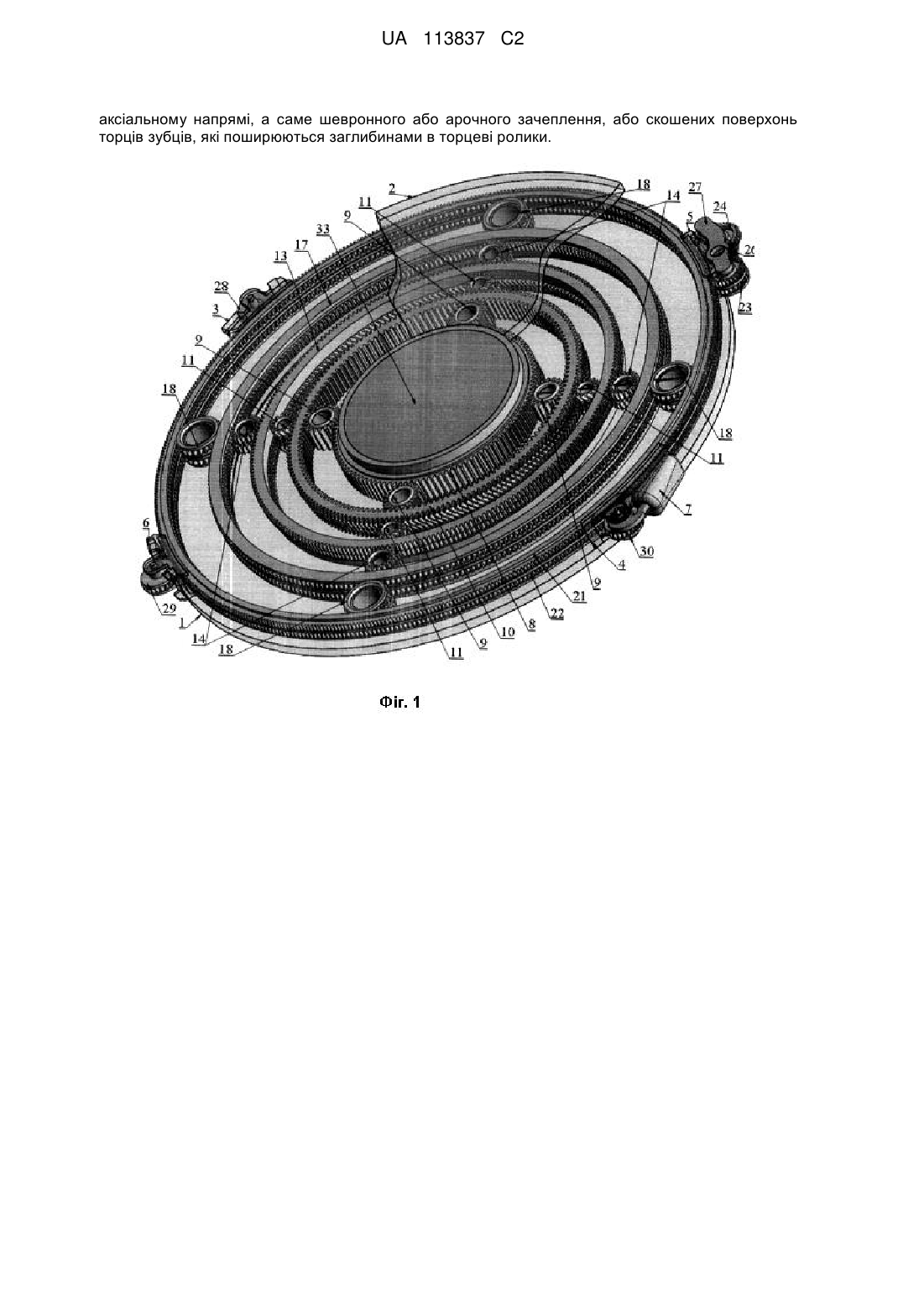
Реферат: Запропонований винахід належить до приладобудування, а саме до систем індикації в аналогових вимірювальних та інформаційних багатоступеневих приладах, зокрема в електронно-механічних та механічних годинниках, і спрямований на поліпшення їх компонування за рахунок прямого використання зубчастого механізму як засобу системи індикації та оптимального розташування органів живлення, приводу та управління, що призводить до зменшення габаритів пристрою, поліпшення його надійності і зручності візуалізації. Вимірювальні прилади з регулятором ходу та/або приводом з відомою лінійною залежністю частоти його обертання від вимірюваної величини містять багатоступеневий зубчастий механізм, складений з коаксіальних планетарних передач з можливими внутрішніми установними і зовнішніми кінематичними зв'язками. Також запропоновані варіанти зубчастого зачеплення, які використовуються в цих механізмах та спрямовані на підвищення ККД їх роботи за рахунок мінімізації їх контактуючих поверхонь ковзання, що досягається використанням підшипникових шестерень, які мають, окрім кочення в радіальному напрямі циліндричними поверхнями торцевих коаксіальних роликів, разом із зубчастим зачепленням, ще і кочення в UA 113837 C2 (12) UA 113837 C2 аксіальному напрямі, а саме шевронного або арочного зачеплення, або скошених поверхонь торців зубців, які поширюються заглибинами в торцеві ролики. UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 ОБЛАСТЬ ТЕХНІКИ Запропонований винахід належить до приладобудування, і може бути використаний для концентричної індикації в аналогових вимірювальних та інформаційних багатоступеневих приладах, таких як лічильники, тахометри, годинники і т. п. РІВЕНЬ ТЕХНІКИ Відомі зубчасті механізми, що використовуються для багатоступеневої індикації у вимірювальних приладах, які містять систему передач для перетворення частоти обертання та/або кута повороту на вході в підвищену або знижену частоту обертання, або кут повороту на виході, як в одну, так і декілька ступенів зубчастих або переривчастих передач. Ці пристрої містять багаторівневу конструкцію, складену з системи передач та системи приводу, відокремленої від засобів індикації, що призводить до громіздкості, необхідності наявності конструкційних елементів, осей, підшипників, що фіксують кінематичні зв'язки для чіткої роботи механізму. Відомий зубчастий індикаційний механізм ["Лічильний механізм" Патент WO 02/101481], що містить систему передач, складену з барабанів з виступами і прорізами, які взаємодіють з трибками з довгими зубцями і стопорами зворотного обертання. Барабани обертаються в прямому напрямі та встановлені на єдиній осі з мінімальним проміжком між ними. На ці барабани нанесені цифри, які при складанні барабанів представляють багатозначне число. При приводі обертання трибки крайнього правого барабана, при кожному новому оберті відбувається обертання довколишнього барабана на одне ділення, чим реалізується лічильник обертів до порядку, рівного числу барабанів. До недоліків цього лічильного механізму можна віднести чисто цифрову переривчасту індикацію, наявність необхідних для роботи додаткових осей, трибів, що не беруть участі у індикації відліку. Найбільш близьким за технічною суттю є зубчастий редукційний механізм вимірювального приладу, що складається принаймні з корпусу та системи передач для приводу системи стрілочної індикації, в якому шестерні встановлені на паралельних осях в підшипниках на корпусній деталі ["Аналоговий пристрій індикації для годинникового механізму" Патент US 5222051, прототип]. Його зубчастий механізм може використовуватись як в електронномеханічних, так і в механічних годинниках з двигуном або заводною пружиною та регулятором ходу як приводом відповідно. На платині як корпусна деталь розташований привід та зубчастий механізм з різними системами передач, який відокремлений циферблатом від стрілочної системи візуалізації, причому увесь механізм розташовується в захисному корпусі з прозорою деталлю для спостереження відліку часу. Сполучення системи передач з стрілками візуалізації здійснено як осями так і коаксіальними втулками крізь отвори в циферблаті. Системами передач зубчастого механізму здебільшого реалізується кратна лінійна залежність між швидкостями обертання різних стрілок індикації, з урахуванням механічних, кінематичних, функціональних та структурних вимог. Цей принцип зубчастої редукції для приводу стрілочної індикації з більшим або меншим набором функціонала типовий для безлічі аналогових годинників з функціями відліку: годин, хвилин, секунд та інших їх похідних величин. З точки зору естетичної та ювелірної придатності в годинниковій індустрії цей механізм має обумовлену кінематичними зв'язками складну конструкцію без симетрії та пропорцій, що призводить до використання циферблата, що відділяє механізм від стрілок для наочної індикації часу, а також до створення багатошарової конструкції зубчастого механізму та, відповідно, до його потовщення. Відомі конструкції дворядних планетарних передач з шестернями сателітами сполученими у блоки, в яких закладений принцип редукції на основі малої різниці передаточних відношень кожної з двох планетарних передач, що призводить до багатократної різниці частоти обертання між сонячними та кільцевими шестернями на вході та виході ["Редуктор швидкості" Патент US 3675510] та ["Планетарна зубчаста передача" Патент RU 2404382]. Конструкції цих дворядних планетарних передач складаються з корпусу, сонячних та кільцевих шестерень, при цьому блоки шестерень-сателітів утримуються в осьовому напрямі або зсувом фаз зубців, корпусом або водилом. До недоліків цих конструкцій можна віднести підвищений знос та заїдання шестерень сателітів для випадку їх зачеплення під навантаженням утримуючись тільки зубцями і ковзанням їх торців ["Редуктор швидкості" Патент US 3675510], а також необхідність використання водила з підшипниками, що ускладнює конструкцію та збільшує кількість кінематичних зв'язків ["Планетарна зубчаста передача" Патент RU 2404382]. Найбільш близьким по технічній суті є зубчастий механізм описаний в патенті ["Зубчасті підшипники" Патент США 2002/0031288 А1, прототип], який містить дворядну планетарну 1 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 передачу, шестерні-сателіти якої об'єднані у блоки та мають циліндричні поверхні кочення, що відповідають їх діаметру ділильного кола, при цьому зубці шестерень входять в зачеплення між цими поверхнями, таким чином фіксуючи радіальне та аксіальне переміщення шестерень сателітів, дозволяючи їм вільно котитися по кільцевій та сонячній шестернях планетарної передачі. Цей же ефект досягається виконанням скіснозубого зачеплення і навіть при незначній зміні передатного відношення кожної з двох планетарних передач можна отримати багатократну редукцію в мінімальному об'ємі при значній жорсткості конструкції. До недоліків цієї конструкції можна віднести наявність тертя ковзання торців зубців під час роботи механізму, та навіть при використанні скіснозубого зачеплення аксіальні сили викликають осьові зусилля на й так малі ділянки торцевих поверхонь зубців та примикаючих роликів, що підвищує знос механізму, та призводить до перекосу шестерень та їх заїдання під навантаженням. Відомий електронно-механічний годинник Quinting ["Прозорий аналоговий годинник" Патент DE 4334646 C1, прототип], що складається з обода корпусу, в якому розміщені: системи кінематичного зв'язку, електронний блок, системи управління, крокові двигуни як привід та джерело енергії. Механізм індикації цього годинника складається з 7 паралельних: сполучених з корпусом двох захисних, та, розташованим між ними, одного тримального та чотирьох рухомих прозорих сапфірових дисків з покриттям антивідблиску, заздалегідь металізованих з нанесеними вінцевими шестернями. Диски приводять у рух стрілки хвилин, годин та покажчик дати, а також стрілку маленького секундного циферблата. Незважаючи на абсолютну прозорість в області циферблата, цей годинник відрізняється деякими недоліками: порівняно великі для наручного годинника розміри обумовлені багатошаровістю системи індикації та потовщеним ободом корпуса з системою приводу, живлення та управління, підвищеною крихкістю, складністю виготовлення деталей, збирання та зміни джерела енергії, що робиться тільки в спеціалізованих майстернях. Відомий механічний годинник з механізмом коаксіального типу ["Коаксіальний годинниковий механізм" Патент WO 2009/112884, прототип]. У ньому: заводна пружина, системи, на яких встановлені засоби індикації часу, індикації кінематичного зв'язку для забезпечення збільшення або зменшення передатних відношень між різними системами і регулятором ходу, встановлені коаксіально. Кожна система має форму чашки, причому кожна чашка має різний діаметр, щоб мати можливість частково вставлятися одна в іншу або одні в інші. Годинниковий механізм містить, крім того, диференціал, встановлений коаксіально заводній пружині для забезпечення її кінематичного зв'язку з однією з чашок за допомогою основного валу і основної втулки, встановленої коаксіально основному валу, при цьому згадана втулка призначена для утримання іншої або інших чашок, а також згаданих засобів кінематичного зв'язку. При оригінальному зовнішньому вигляді цей механізм має недоліки, пов'язані з багаторівневою вкладеністю систем приводу і редукції, разом з великою кількістю рухливих корпусних деталей, які підвішені на декількох послідовних кінематичних зв'язках, що створює велику громіздкість, товщину і накладає підвищені вимоги до точності виготовлення при збиранні механізму. ЗАДАЧА ТА ТЕХНІЧНИЙ РЕЗУЛЬТАТ В основу запропонованого винаходу поставлено задачу: реалізувати зубчасту систему передач механізму аналогових вимірювальних та інформаційних приладів у вигляді багатоступеневих вкладених планетарних передач, зокрема складених з підшипникових шестерень для використання як системи індикації на основі шестерень або водил з декоруванням, а також максимально виключити ковзання в підшипникових шестернях зведенням до мінімуму сили тертя їх зачеплення. Як технічні результати можна відзначити: високу надійність за рахунок мультипланетарної конструкції з багаторівневою системою кріплення, поруч з найліпшим заповнення простору механізму, оптимальним зачепленням в системі передач при найменшій товщині зубчастого механізму, що становить в основному двошарову конструкцію з мінімумом корпусних деталей, та має високу інтуїтивну, інформаційну здатність та візуалізаційну привабливість за рахунок симетричної планетарної прозорої конструкції з аналоговою індикацією та можливістю більш детального спостереження вимірювальних величин. Також, відзначені технічні особливості компонування та управління механічних та електронно-механічних годинників з використанням цього механізму та завдяки схожому вигляду індикаційного планетарного механізму відносно площини його дії запропоноване можливе використання, що містять його приладів з двох сторін. РОЗКРИТТЯ ВИНАХОДУ Поставлена задача вирішується тим, що в зубчастому механізмі вимірювального приладу складеного принаймні з корпусної деталі, приводу обертання і системи передач, відповідно до 2 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 винаходу, його система передач містить вкладені коаксіальні планетарні передачі, при цьому принаймні одна з них дворядна з принаймні однією шестірнею-сателітом на кожну з них. Розташування механізму визначається сполученням деяких сонячних або кільцевих шестерень з корпусними деталями, причому може також використовуватися додаткова фіксація: осей сателітних шестерень на водилі та/або осей водила, кільцевих або сонячних шестерень – з корпусною деталлю або з іншими співвісними шестернями. Використовуючи планетарні передачі безпосередньо як основу системи індикації рухомими шестернями або водилом значно спрощується механізм, та призводить до можливості його оптимального компонування з приводом, джерелом енергії та управлінням. Застосовуючи здебільшого підшипникові шестерні та/або шевронні зачеплення в системі передач поліпшуються кінематичні зв'язки за рахунок спрощення підвіски механізму, реалізовуючи тим самим максимальне зачеплення на основі кочення, а також виконанням торцевих поверхонь та заглибин зубців підшипникових шестерень скошеними підвищується ККД механізму. Надалі, під індикацією розуміється спосіб визначення вимірюваної величини, під системою індикації - багаторівневий механізм для його реалізації, а під засобом індикації – відмітна частина пристрою, яка жорстко кріпиться або наноситься до його основи – деталі механізму. Під корпусною деталлю мається на увазі сам корпус механізму або деталь жорстко зафіксована на ньому або відносно нього, а під осьовою фіксацією – кріплення: осями та антифрикційними опорами, підшипниками ковзання або кочення з фіксацією усіх ступенів свободи за винятком відносної обертальної. При цьому під планетарною передачею мається на увазі принаймні одна шестірня-сателіт з круговим орбітальним рухом та зубчастим зачепленням з кільцевою та/або сонячною шестірнею, причому на осях сателітних шестерень може бути встановлене водило. Під вінцевою шестірнею мається на увазі шестірня на водилі або сонячній, або кільцевій шестірні, яка не бере участі в зубчастому зачепленні з принаймні однією з сателітних шестерень. Більші шестерні це ті, що мають більший діаметр ділильного кола до порівняних шестерень. Вкладена планетарна передача відносно зовнішньої має рухомукільцеву шестірню або водило, сполучене з сонячною рухомою шестірнею або водилом іншої, зовнішньої планетарної передачі, та навпаки. Багатоступенева вкладена система планетарних передач являє собою концентричний відносно спільної осі усіх кільцевих та сонячних шестерень планетарний механізм, що має у радіальному напрямі: центральну сонячну, та зовні периферійну кільцеву шестірню. У цьому планетарному механізмі при менших орбітальних швидкостях сателітів вкладених планетарних передач, ніж зовнішніх, мають сполучення з корпусною деталлю принаймні сонячні шестерні по одній на кожну одно- або дворядну планетарну передачу, при більших швидкостях - тільки кільцеві. Використання водила встановленого з осьовою фіксацією відносно осі планетарної передачі визначає рух і зубчасте зачеплення шестерень сателітів встановлених на ньому. При цьому водило може виконувати функцію рамної одиниці з розміщеним на ньому принаймні одним регулятором ходу цього механізму кінематично пов'язаним з однією з сонячних шестерень або з концентричним їм зубчастим колесом сполученим з корпусною деталлю. Дворядна планетарна передача є однією планетарною передачею складеною з двох паралельних, з спільними осями використаних в ній: водил, сонячних, кільцевих та попарно шестерень сателітів. У більшості випадків дворядних планетарних передач шестерні-сателіти сполучені у блоки та редукція здійснюється від зовнішніх планетарних передач до вкладених з сполученням прилеглих рухомих: сонячних та кільцевих шестерень. В цих випадках, якщо у блоці передавальний момент сателітної шестерні менший, ніж шестерні в зачепленні із сполучною з корпусною деталлю сонячною шестірнею, то орбітальне обертання шестерень сателітів вкладеної планетарної передачі здійснюється в тому ж напрямі, що і зовнішніх, та навпаки. Сполучення деталей має на увазі як цілісне виготовлення або збірне жорстке з'єднання: гвинтами, скобами, нарізним з'єднанням, з натягом, спаюванням, зварюванням або склеюванням, так і проковзне з'єднання у вигляді проковзної запобіжної муфти або фрикційного з'єднання. Складання механізму може здійснюватися, як із складових розбірних деталей, так і сполученням поруч з можливою пружною та/або термічною деформацією на етапах технологічної послідовності. Проковзне з'єднання може використовуватися як в технологічних цілях, так і в цілях кінематичних, в яких сила його зчеплення має бути підібрана так, щоб не прослизати при роботі механізму і довільно не ковзати при його установці. Також водило, може мати вінцеву шестірню для зачеплення з іншими шестернями або мати сполучення з іншою сонячною або кільцевою шестірнею механізму. Для реалізації більшого набору передатних відношень або навіть перемикання режимів редукції принаймні в одній з дворядних планетарних передач шестерні-сателіти попарно можуть мати осьову фіксацію одна відносно одної, при сполученні їх кільцевих або сонячних шестерень або навіть при їх зовнішньому кінематичному зв'язку, під яким і надалі 3 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 мається на увазі зубчасте зачеплення через дві вінцеві шестерні, яке також може мати спосіб перемикання через роздільні зубчасті передачі. Привід механізму може здійснюватися на одну з сонячних або кільцевих шестерень або водило, а також через шестірню з осьовою фіксацією на корпусній деталі, що входить в зачеплення з вінцевою шестірнею сполученою з водилом або рухливою: сонячну центральну або кільцеву периферійну шестірню. У разі складання планетарного механізму з шестерень, необхідно встановлювати з осьовою фіксацією: сателітні шестерні – відносно водила, а інші рухомі шестерні та водила – відносно корпусної деталі, або обмежувати їх рух корпусними деталями що примикають к планетарному механізму або шевронним чи арочним зачепленням. В цілях уникнення цих заходів замість шестерень механізму можуть бути використані - підшипникові шестерні у вигляді шестерень з розташованими по одній або двом сторонам циліндричними роликами діаметрів що відповідають діаметру ділильного кола цих шестерень, та мають: прямозубе, скіснозубе, шевронне або арочне зачеплення, а також: циклоїдні, евольвентні або кругогвинтові форми профілів зубців, при цьому торцеві поверхні зубців і заглибин між ними можуть бути виконані: як плоскими, так і скошеними, що описано нижче. В кожній парі спряжених підшипникових шестерень їх зубці входять в зачеплення між торцевими роликами кожної з них, а спряжені ролики мають однакову висоту. Не враховуючи проміжки та якість виготовлення, зачеплення підшипникових шестерень має на увазі максимальне торкання і контакт при мінімальному ковзанні спряжених в русі пар профілів зубців. Торцеві ролики забезпечують блокування переміщення шестерень в радіальному напрямі в місцях їх контакту, що на ряду із зубчастим зачепленням реалізує кочення без прослизання спряжених їх пар. Торцеві поверхні зубців і заглибини, утворювані на межі між ними і торцевими роликами, блокують аксіальне пересування підшипникових шестерень, реалізовуючи їх взаємний плоскопаралельний рух. Таким чином, при застосуванні в планетарних передачах підшипникових шестерень з використанням принаймні кільцевої, сонячної і більше двох сателітів рівномірно розподілених між ними, компонується уся планетарна передача, і можливе використання водила може бути замість кільцевих або сонячних шестерень, або мати функцію як рамної одиниці, так і для передачі крутильного моменту від сателітів, а фіксація ступенів свободи водила накладатиме надмірні зв'язки або слугуватиме додатковою основою розподілу сил роботи механізму. У разі використання менше трьох підшипникових шестерень сателітів принаймні осі рухливих сонячних та/або кільцевих підшипникових шестерень необхідно фіксувати відносно корпусних деталей механізму. Для підтримки принаймні однієї з рухомих сонячних центральних або кільцевих периферійних підшипникових шестерень або водила однієї з планетарних передач, вони можуть мати додаткове зачеплення вінцевою підшипниковою шестірнею з іншими підшипниковими шестернями з осьовою фіксацією: відносно корпусної деталі або розташованому на ній важелі. На ці, інші підшипникові шестерні, може подаватися привід та/або вони можуть мати зубчасті та/або перемикаючи зв'язки з іншою вінцевою шестірнею цієї планетарної передачі. В зв'язку з виконанням зубчатого механізму здебільшого у вигляді вкладених планетарних передач вільним залишається простір в його центрі та на периферії механізму, тому для компонування годинникових механізмів найбільш придатним є розташування у центрі планетарного механізму джерела енергії або генератору з інерційним сектором у разі електронно-механічного годинника, або заводної пружини в поворотному барабані з функцією установки та заводу, для випадку механічного годинника. Також, у ободі корпуса годинника пропонується розташування: електронного блока системи управління, приводу механізму, та джерела енергії або навіть в браслеті у разі електронно-механічного годинника. При цьому під джерелом енергії мається на увазі джерело або акумулятор електроенергії, або їх батарея. Як матеріали принаймні для виготовлення зубчастого механізму окрім пластмас, мінералів, металів та сплавів, рекомендується використовувати: полікристалічний кремній, алмаз, або покритий алмазним покриттям кремній. Для виготовлення прозорих елементів – органічне, або мінеральне скло, або сапфір, а для підшипників ковзання – поліровані поверхні, рубінові камені та антифрикційні втулки. Корпусні деталі можуть бути виготовлені з пластмас, металів, твердих сплавів або високотехнологічної кераміки. Приклади виконання винаходу описані нижче і пояснюються кресленнями, на яких представлено: Фіг. 1 – схематичний вид варіанта зубчастого механізму з позначенням приводу та напівпрозорих корпусних деталей; Фіг. 2 – збільшений фрагмент осьового перетину зачеплення зубчастих передач на фіг.1; Фіг. 3 – збільшений фрагмент Фіг.1 перемикання редукції в зубчастих передачах; 4 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 4-12 – елементи кінематичних схем зубчастих механізмів для компонування вкладених планетарних передач, їх підвіски та їх зубчастих зв'язків; Фіг. 13 – зачеплення в парі підшипникових шестерень із скошеними поверхнями торців зубців і заглибин на роликах між ними; Фіг. 14 – вид половини зубця меншої з пари підшипникових шестерень по фіг. 13; Фіг. 15 – фрагмент пари підшипникових шестерень з шевронним зачепленням; Фіг. 16 – збільшена пара зубців однієї з шестерень представлених на фіг. 15; Фіг. 17 – фрагмент варіанта фрикційного з'єднання шестерень зубчастого механізму; Фіг. 18 – загальний вид запропонованого електро-механічного годинника з вирізом часового стекла та частини корпусу та умовними позначеннями, приводу, електронних схем та систем управління; Фіг. 19 – збільшений фрагмент поперечного розрізу по центрам сателітів планетарних передач механізму годинника представленого на фіг. 18; Фіг. 20 – загальний вид запропонованого механічного годинника з вирізом часового стекла та частини корпусу, для представлення водила з розташованим на ньому регулятором ходу; Фіг. 21 – збільшений фрагмент поздовжнього розрізу по центрам сателітів планетарних передач механізму годинника зображеного на фіг. 20; Фіг. 22 – деталізований вид поворотного барабана з заводною пружиною годинника зображеного на фіг. 20, та його планетарно-заскочного механізму; Фиг. 23 – збільшений фрагмент регулятору ходу, виду годинника зображеного на фіг. 20. Відповідно до фіг. 1-3 зубчастий механізм вимірювального приладу містить, щонайменше корпусні деталі 1-6, привід обертання 7 та систему передач 8-30, відокремлену прозорою корпусною деталлю 2. Система передач виконана у вигляді вкладених коаксіальних планетарних передач, з чотирма сателітами на кожну з них, при цьому, три планетарні передачі дворядні та одна однорядна, а також, одна сонячна шестірня 8, 12, 16, 20 кожної з планетарних передач сполучена з корпусною деталлю 1. Сонячну центральну шестірню 8 обкочують шестерні-сателіти 9 що приводяться в рух кільцевою шестірнею 10. У зв'язку з тим, що ця планетарна передача є остаточним елементом кінематичного зв'язку в механізмі вона може бути виконаний однорядною. Далі, сполучена з кільцевою 10 сонячна шестірня зовнішньої планетарної передачі входить в зачеплення з меншою шестірнею-сателітом кожного блока 11, більша шестірня якого входить в зачеплення з сонячною шестірнею 12 проводячи багатократну редукцію на вкладену планетарну передачу. Більша з шестерень сателітів кожного блока 11 також має зачеплення з кільцевою шестірнею 13 що має сполучення з сонячною шестірнею зовнішньої планетарної передачі. Ця сонячна шестірня входить в зачеплення з меншою шестірнею кожного блока сателіта 14 з осьовою фіксацією на водилі 15, більша ж його шестірня має зубчасте зачеплення із сонячною шестірнею 16 реалізовуючи дворядну планетарну передачу. Одна, в даному випадку більша, сателітна шестірня кожного блока 14 має зубчасте зачеплення з кільцевою шестірнею 17, яка, у свою чергу, сполучена з сонячною підшипниковою шестірнею зовнішньої дворядної планетарної передачі. Ця сонячна підшипникова шестірня входить в зачеплення з підшипниковими сателітними шестернями 18 з попарною осьовою фіксацією з підшипниковими шестернями сателітами 19, які обкочують сонячну підшипникову шестірню 20. Кожна з підшипникових шестерень 18 та 19 входить в зачеплення з кільцевими периферійними підшипниковими шестернями 21 та 22 відповідно. Ці дві кільцеві шестерні 21 та 22, можуть бути як сполучені одна відносно другої, так і мати зовнішній кінематичний зв'язок між собою, або навіть застосовувати в ньому спосіб перемикання редукції від системи управління, наприклад через роздільні зубчасті блоки, що перемикаються, або як показано на фіг. 1 та 3 блок 23 та пари: блок 24 з паразитною шестірнею 25, з осьовою фіксацією на поворотному відносно корпусної деталі 5 отворами 26 важелі 27. Перемикання може бути реалізовано також муфтами на зовнішньому кінематичному зв'язку роздільними зубчастими передачами при осьовій фіксації шестерень на корпусній деталі. Для додаткової підвіски або приводу механізму на корпусних деталях 3, 6, 4 з осьовою фіксацією можуть бути розташовані шестерні або підшипникові шестерні 28, 29, 30 відповідно, що входять в зачеплення з вінцевою шестірнею або підшипниковою шестірнею на одній з кільцевих периферійних підшипникових шестерень, 21 або 22. Також принаймні на одну з шестерень 28, 29 або 30 може подаватися привід обертання, наприклад від крокового двигуна 7. Як приклад систем кінематичних зв'язків, цей зубчастий механізм має різні способи аксіального утримання рухомих елементів планетарних передач. Так, у радіальному напрямку в першій прямозубій однорядній планетарній передачі шестерні-сателіти 9 утримуються торцевими поверхнями між двома корпусними деталями 1, 2. У другій дворядній планетарній передачі блоки шестерень сателітів 11 утримуються шевронним зчепленням, а саме: більшими 5 UA 113837 C2 5 10 15 20 25 30 шестернями блоків 11 зчепленням з шестернями 12 та 13, тим самим зчепленням меншими сателітними шестернями утримуючи осьове переміщення рухомої сонячної шестірні 10, та відповідно кільцевої шестірні вкладеної планетарної передачі. Третя дворядна планетарна передача є прямозубою без торцевих контактів її рухомих шестерень з корпусними деталями, тому для осьової фіксації блоків сателітних шестерень 14 використане водило яке має осьову фіксацію відносно сонячної підшипникової шестірні 20 зовнішньої планетарної передачі, також осьову фіксацію має рухома сонячна шестірня 13 відносно сонячної шестірні 16 цієї планетарної передачі. Четверта дворядна планетарна передача переважно утримується підшипниковими шестернями як у радіальному так і аксіальному напрямку, за винятком осьової взаємної фіксації в сателітних попарних блоках з підшипникових шестерень 18 та 19. Як показано на Фіг. 1 та 2 сателіти планетарних передач 9, 11, 14, 18, 19 можуть мати усередині отвори для декорування, наприклад, різнокольоровими прозорими циліндрами 31 та також принаймні на одному з цих сателітів кожної планетарної передачі можуть бути встановлені стрілки 32 для візуалізації долів їх обертів. Для подібного механізму до фіг. 1-3, якщо конструкція не передбачає перемикання редукції та при наявності передатних відношень планетарних шестерень, у більшості випадків, шестерні-сателіти 18 та 19 будуть сполучені у блоки, з використанням однієї кільцевої шестірні та/або водила як з вінцевою шестірнею, для її зовнішнього приводу, так і без, для випадку приводу від вкладених планетарних передач. Як видно увесь механізм індикації майже однаково виглядає з двох сторін тому він може використовуватися також для зворотного відліку при положенні з іншого боку або при приводі механізму в зворотному напрямку для використання з іншою градацією та/або декоруванням з обох сторін, у цьому випадку корпусні елементи примикаючи к індикаційній системі передач повинні бути виконані прозорими, наприклад корпусний елемент 1 та частково показаний елемент 2. У центрі планетарного механізму пропонується розташовувати барабан 33 для розміщення в ньому принаймні: допоміжних кінематичних зв'язків системи передач, приводу, електронних схем, генератора, джерела енергії або навіть декорації. При цьому барабан може мати знімну кришку в технологічних або експлуатаційних цілях, наприклад для зміни джерела енергії, або мати принаймні одну прозору стінку для візуалізації процесу, що проходить в ньому. Параметри шестерень зубчастого механізму представленого на фіг. 1-3 підібрані як приклад використання у якості зубчастого годинникового механізму, та наведені в таблиці: 10 11 Ш 50 18 18 19 20 N 45 108 Ш 40 9 N 35 8 24 24 264 К 144 C 176 М 14 176 В 462 К 312 21 К 308 13 12 Б 16 К 208 22 В 390 14 С 247 23 М 28 М 19 Б 24 Б 22 16 242 24 М Б 18 33 17 К 286 С 260 25 28-30 18 24 Де: Ш – позиції шестерень на фіг. 1-3; N – кількість їх зубців; С – сонячна; К – кільцева; М – менша; Б – більша; В – вінцева шестірня. Від приводу обертання 7 на шестірню 30 із швидкістю 30 об./хвилину через зубчасте зачеплення блока 23 з вінцевими шестернями периферійних кільцевих шестерень 21 та 22 першої дворядної планетарної передачі, відбувається орбітальне обертання блоків шестерень сателітів 18, 19 із швидкістю 1 об./хвилину і обертання навколо власної осі шестерень сателітів 18 із швидкістю 12 об./хвилину. Далі, кінематичні зв'язки на другу вкладену дворядну передачу, від кільцевої шестірні 17 до більших шестерень блоків сателітів 14, забезпечують їх орбітальне обертання із швидкістю 1 об./годину, а навколо власної осі із швидкістю 12 об./годину. У третій вкладеній дворядній планетарній передачі блоки шестерень сателітів 11 орбітально обертаються із швидкістю 2 об./день і навколо власної осі за 1 годину, та передаючи редукцію на четвертую вкладену планетарну передачу реалізується орбітальне обертання шестерень сателітів 9 із швидкістю 1 об./тиждень і навколо власної осі за 1 день. При перемиканні зачеплення кільцевих шестерень 21 та 22 вінцевими шестернями з блока 23 на блок 24 з паразитною шестірнею 25 відбувається при тій же швидкості обертання приводу, та орбітальним обертанням блоків шестерень сателітів 18 та 19, збільшення орбітального обертання блоків шестерень сателітів 14 в 181 рази при тих же передатних відношеннях на подальші вкладені планетарні передачі, що дозволяє при перемиканні з дискретністю в одну секунду робити прискорену установку позиції положення сателітних шестерень без зрушення позицій первинних установок для періоду рух. 6 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 На фіг. 4-12 елементів кінематичних зв'язків лівою осьовою лінією, розділювальною між фігурами, показаний центр планетарної передачі. Ці кінематичні зв'язки можуть бути складені або з шестерень, як представлено нижче, або з підшипникових шестерень, та можуть використовуватися для компонування кінематичних схем пропонуємих зубчастих механізмів, зокрема в аналогових вимірювальних приладах. Фіг. 4 – Планетарна передача з сонячної 34, сателітної шестірні 35 і кільцевої шестірні 36, на яку подається обертання. В даному випадку, сонячна шестірня сполучена з корпусною деталлю, а планетарна передача використовується тільки для індикації шестернями сателітами та/або у якості підшипника; Фіг. 5 – Зовнішнє вінцеве зачеплення кільцевої шестірні 37, яка передає обертання. Шестірня 38 має осьову фіксацію відносно корпусної деталі 39 та може служити як в якості приводу механізму або безпосередньо від двигуна або через зубчасті передачі, так і виконувати функцію підшипника для вінцевої підтримки кільцевої шестірні; Фіг. 6 – Дворядна планетарна передача, в якій одна з сонячних шестерень 40 сполучена з корпусною деталлю, а інша 41 передає обертання, при цьому обертання подається на верхню шестірню блока сателіта 42 кільцевою шестірнею 43; Фіг. 7 – Дворядна планетарна передача, в якій одна з сонячних шестерень 44 сполучена з корпусною деталлю, а інша 45 передає обертання, при цьому обертання подається на нижню шестірню блока сателіта 46 кільцевою шестірнею 47; Фіг. 8 – Планетарна передача, в якій сонячна шестірня 48 сполучена з корпусною деталлю, шестірня-сателіт 49 має осьову фіксацію на водилі 50, а обертання подається на кільцеву шестірню 51 при цьому водило використовується принаймні як підтримка шестерень сателітів, або навпаки, або для передачі обертання, при цьому може бути реалізований варіант без кільцевої шестірні з приводом від водила; Фіг. 9 – Дворядна планетарна передача, в якій на водилі 52 має осьову фіксацію блок шестерень сателітів 53. Одна з сонячних шестерень 54 сполучена з корпусною деталлю, а інша 55 служить для передачі обертання, при цьому привід подається на кільцеву шестірню 56 маючу зубчасте зачеплення з однією з шестерень кожного блока 53. Водило використовується принаймні як підтримка шестерень сателітів, або навпаки, або для передачі обертання, при цьому може бути реалізований варіант без кільцевої шестірні з приводом на водило; Фіг. 10 – Дворядна планетарна передача, в якій одна з сонячних шестерень 57 сполучена з корпусною деталлю, а інша 58 передає обертання, при цьому дві кільцеві шестерні 59 та 60 об'єднані у блок 61 та на них подається обертання, також шестерні-сателіти 62 та 63 попарно мають осьову фіксацію одна відносно другої; Фіг. 11 – Зубчастий механізм з дворядною планетарною передачею, при якому одна з сонячних шестерень 64 сполучена з корпусною деталлю, а інша 65 передає обертання, при цьому шестерні-сателіти 66 та 67 попарно мають осьову фіксацію відносно друг друга, а дві кільцеві шестерні 68 та 69 мають вінцевими шестернями зубчастий зв'язок через блок шестерень 70. Обертання подається на одну з кільцевих шестерень 68 або 69, або на блок шестерень 70; Фіг. 12 – Зубчастий механізм з дворядною планетарною передачею, при якому одна з сонячних шестерень 71 сполучена з корпусною деталлю, а інша 72 передає обертання, при цьому шестерні-сателіти 73 та 74 попарно мають осьову фіксацію відносно друг друга, а дві кільцеві шестерні 75 та 76 мають зубчастий зв'язок вінцевими шестернями через блок шестерень 77 та шестірню 78. Обертання подається на одну з кільцевих шестерень 75 або 76, або на блок шестерень 77. Під поданням і передачею обертання мається на увазі як сполучення або часткове співпадання з принаймні однією з представлених схем зв'язків на Фіг. 4-12, так і привід від зовнішнього джерела обертання. За винятком осі механізму, відобразив дзеркально відносно осі сателітної шестірні кінематичні схеми на Фіг. 4-12, отже, в конфігураціях помінявши місцями вираження сонячні на кільцеві і вкладені на зовнішні, можна отримати зворотні кінематичні схеми з редукцією спрямованою на підвищення швидкості обертання від вкладених планетарних передач до зовнішніх. Також помінявши подання і передачу обертання місцями на схематичних варіантах можна отримати зворотне застосування. Окрім цього, при описі Фіг. 4-12 в однині мається на увазі, що шестерень сателітів або їх блоків може бути декілька. Також, відносні розміри, приміром діаметри шестерень сателітів у блоках, показані умовно і можуть мати різні пропорції. В зубчастих механізмах представлених на Фіг. 11 та Фіг. 12 позиції 70, 77, 78 можуть мати осьову фіксацію відносно корпусної або рухливої деталі, при цьому у випадку використання декількох з цих механізмів з спільною планетарною передачею мати можливість роз'єднання їх 7 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 кінематичного зв'язку наприклад муфтами в блоках шестерень або перемиканням їх зубчастого зачеплення, як наприклад представлено на Фіг. 1 та 3. У разі дворядних планетарних передач, в яких шестерні-сателіти сполучені у блоки для редукції зі швидкостями зовнішніх планетарних передач більше ніж вкладених Фіг. 6 та аналогічно для Фіг. 7, для кожної дворядної планетарної передачі застосовується дві сонячні шестерні та одна кільцева, що мають зубчасте зачеплення з шестернями сателітами блока цієї дворядної планетарної передачі, при цьому одна сонячна шестірня сполучена з корпусною деталлю, а інша має редукційне обертання. У зворотному випадку, для випадку дворядних планетарних передач, в яких шестерні-сателіти сполучені у блоки з підвищенням швидкості від вкладених планетарних передач до зовнішніх, використовується одна сонячна шестірня що має зубчасте зачеплення з однією з шестерень кожного блока сателіта цієї дворядної планетарної передачі і дві кільцеві шестерні, одна з яких сполучена з корпусною деталлю, а інша має редукційне обертання. Водила, рухомі шестерні або їх блоки можуть бути як вільно розміщені, утримуючись підшипниковими шестернями, ухилом зубців шевронного або арочного зачеплення, або прилягаючими корпусними деталями до планетарного механізму, так і додатково мати осьову фіксацію як з корпусом, так і між собою, та/або мати водило Фіг. 8 та Фіг. 9, яке може виконувати функцію, як рамної одиниці, так і передатної ланки в кінематичних зв'язках механізму. Також, можуть бути реалізовані складніші зв'язки Фіг. 10, 11 та 12 при осьовій фіксації шестерень сателітів відносно одна одної. У такому разі використовуватимуться як дві сонячні так і дві кільцеві шестерні, тобто система буде дворядною з однорядними планетарними передачами для яких одна шестірня-сателіт служитиме водилом для другої та навпаки. При цьому одна з двох сонячних або двох кільцевих шестерень буде сполучена з корпусною деталлю, а дві протилежні сонячні або кільцеві шестерні будуть сполучені між собою Фіг. 10 або мати зовнішні кінематичні зв'язки Фіг. 11 та 12. Шестерні-сателіти, кільцеві та сонячні або водила можуть бути використані в якості як прямої індикації так і її основи із застосуванням засобів, таких як: гравірування, інкрустація, ограновування або декорування стрілками, емаллю, каменями та т.п… Причому, як показано вище, для точнішої індикації можна так підібрати параметри зубчастих зачеплень щоб, приміром, центри шестерень сателітів орбітально описували один, а в тей же час самі вони здійснювали декілька повних обертів навколо своєї осі, при цьому розмістивши в центрі шестерень сателітів покажчик спрямованості можна наочніше визначати вимірювану величину. Також може бути виконаний циферблат у вигляді цифр та/або міток шкали поділок на поверхні принаймні однієї з корпусних деталей до яких можна віднести також сполучені з корпусною деталлю сонячні та/або кільцеві шестерні. Для зменшення тертя ковзання в зачепленні підшипникових шестерень на торцевих поверхнях їх зубчастих коліс і прилягаючих заглибинах їх роликів, необхідно виконувати або похилу реалізацію зубців зубчастих коліс або робити поверхні аксіального зачеплення у вигляді поверхонь з їх максимальним обкатом під час зачеплення. Нижче запропоновані варіанти реалізації зубців підшипникових шестерень із скошеними поверхнями їх торців і заглибин між ними, а також шевронного зачеплення з мінімальним осьовим переміщенням за рахунок зустрічного нахилу зубців. Зачеплення підшипникових шестерень, представлене на Фіг. 13 містить частину кільцевої шестірні що складається з роликів 79, 80 із зубчастим колесом 81 та одну шестірню-сателіт що складається з роликів 82, 83 із зубчастим колесом 84. Торцеві ролики 79 та 82, 80 та 83 попарно входять в контакт, а також зубці шестерень 81 та 84 – знаходяться в зачепленні. Торцеві поверхні утворюються двостороннім циліндричним гвинтовим витягуванням профілю зубця відносно осі підшипникової шестірні, який поширюється заглибинами в торцеві коаксіальні ролики до середини зубця. На Фіг. 14 показаний вид половини зубця сателітної підшипникової шестірні зображений на Фіг. 13 обмежений площинами 85 та 86, що проходять скрізь її вісь. Симетричним відображенням відносно однієї з площин 85 або 86 і круговим масивом з числа зубців відносно осі шестірні утворюється її повна конфігурація. Форми торцевих поверхонь зубців 87, 88 та заглибин в роликах 89, 90 на межі із зубцями утворюються спіральним витягуванням твірної форми профілю зубців 91 уздовж гвинтових циліндричних дзеркальних відносно точки перегину ліній 92 на одному торці і 93 на іншому. Гвинтові циліндричні лінії можуть бути різного кроку на кожному з торців, проте попарно спряжені в зачепленні торці зубців і заглибини між ними повинні утворюватися гвинтовими лініями рівного радіусу з кроком пропорційним передатному відношенню зачеплення. Конфігурація шевронного зачеплення шестерень сателітів що складається із зубчастого колеса 94 з роликами 95, 96 та частини сонячної шестірні що складається із зубчастого колеса 8 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 97 з роликами 98, 99 представлена на Фіг. 15, при цьому шевронні зубчасті колеса 94 та 97 входячи в зачеплення блокують їх взаємне аксіальне пересування, тому торцеві поверхні зубців і заглибин між ними з попарно контактуючими роликами 95, 98 та 96, 99 відповідно можуть бути виконані плоскими. Також реалізувавши проміжок між торцевими роликами та зубчастими колесами в зачепленні за рахунок виконання заглибин між зубцями більшої ширини чим ширина зубців, тобто заблокувавши аксіальне переміщення тільки шевронним зачепленням, можна виключити тертя ковзання торців зубців відсутністю їх торцевого контакту. На Фіг. 16 показаний вид двох зубців шестірні-сателіта зображеної на Фіг. 15 обмежених площинами 100 та 101 що проходять скрізь її вісь. З фігури видно що висота зубців, що виступають, тобто відстань між кромками 102 та 103 менше, ніж висота заглибин між ними, тобто відстань між поверхнями 104 та 105, що запобігає торцевому контакту підшипникових шестерень. На Фіг. 17 представлений фрагмент варіанта фрикційного з'єднання вкладених планетарних передач в пазах між їх кільцевою 106 та сонячною 107 шестернями хвилевим кільцевим пружинним прокладенням 108, яке може спрощувати тим самим зборку та/або реалізовувати можливість додаткової установки позицій механізму при прослизанні цього фрикційного з'єднання при заданій силі. Внутрішні циліндричні поверхні пазів кільцевої і сонячної шестерень можуть бути виконані як гладкими так і з рифленням, шорсткостями або хвилевим подовжнім профілем для точнішого зачеплення і перешкод довільному прослизанню при кінетичному терті поверхонь. Запропонований принцип зубчастого механізму може бути використаний як в електромеханічному так і в механічному годинникові. Надалі планетарні передачі, в яких шестерні-сателіти орбітально обертаються зі швидкістю один оберт на тиждень – називаються тижневими, та відповідно: два оберти на день – денними, один оберт за годину – годинними, та один оберт в хвилину – хвилинними. Приклад реалізації електронно-механічного годинника, в якому зубчастий механізм для відліку секунд, хвилин, годин та днів тижня виконаний у вигляді вкладених одно- та дворядних коаксіальних планетарних передач с індикацією сателітними шестернями, показаний на Фіг. 18 та 19. Цей механізм цілковито складений з підшипникових шестерень, тому при його описі термін "підшипникові" опускається. У центрі коаксіального механізму, в циліндричному барабані 109, розташовується джерело енергії 110. Барабан має знімну кришку 111 для можливості зміни джерела енергії. По краях обода барабана внутрішніми отворами кріпляться дискові стекла 112 та 113, при цьому зовнішні обода дискових стекол посаджені на внутрішні поверхні корпусу годинника 114, створюючи тим самим єдине ціле між барабаном елементу живлення 109, стеклами 112, 113 і самим корпусом годинника 114. Усередині корпусу 114 розташовуються чотири корпусні деталі 115-118 на кожній з яких установлено відповідно по одній шестірні 119122 з осьовою фіксацією. Також на корпусних деталях 115-118 розміщені: привід 123 та 124 для шестерень 119 та 121, кнопки управління годинником 125 та 126, електронний блок управління генерації імпульсів приводу 127, при цьому електричні кола розміщені як в корпусі і барабані джерела енергії, так і нанесені на скло 112, 113 та/або інші несучі конструкції. Електричні кола на склі можуть бути виконані як прозорими або дуже тонкими, так і мати естетичну функцію, виявляючи як візерунок, так і шкалу часових ділень та/або цифр. Як привід годинника можуть бути використані як принаймні один реверсивний, так і декілька однонаправлених крокових двигунів, у даному випадку два, позиції 123 та 124 на Фіг. 18, причому їхня дія може бути як послідовною так і злагодженою, наприклад два двополюсні двигуни можуть провертати по чверті оберту кожен свій магнітний ротор та за рахунок їх кінематичного зубчастого зв'язку реалізовуючи їх двонапрямлену дію послідовними комутаціями їх котушок. Реверсивність приводу може бути використана як для роботи годинникового механізму в обидві сторони, реалізувавши тим самим варіанти використання годинника як з одного боку, так і з іншого, так і для режиму установки часу, тобто приводу годинникового механізму на підвищених швидкостях. Зубчастий механізм годинника складений з чотирьох концентричних вкладених планетарних передач сполучених рухомими кільцевими та сонячними шестернями. Так кінематично, по Фіг. 18 та 19 у радіальному напрямку перша, тижнева однорядна планетарна передача з дворядними шестернями має зачеплення по Фіг. 4 та складається з шестерень 128, 129, 130, друга, денна – по Фіг. 7 складається з шестерень 131, 130, 132, 133, третя, годинна – по Фіг. 6 складається з шестерень 134, 133, 135, 136, четверта хвилинна – по Фіг. 7 та складається з шестерень 137, 136, 138, 139, з вінцевим зачепленням та приводом – по Фіг. 5 та складається з шестерень 139, та кожною з шестерень 119-122. Сонячні шестерні планетарних передач, які потрібно фіксувати в кінематичних зв'язках, можуть бути сполучені з барабаном та, або 9 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 безпосередньо на одному із годинникових стекол, або на додатковій корпусній деталі розташованій між ними. Так центральна сонячна шестірня 128 сполучена з барабаном 109, а ще три сонячні шестерні 131, 134, 137 – з годинниковим склом 112. В зв'язку з тим що увесь зубчастий механізм, за винятком осьових опор шестерень підвіски 120, 122, та шестерень приводу 119, 121, виконано на підшипникових шестернях він підтримується їх зачепленням, для випадку трьох і більше рівномірно розподілених підшипникових шестерень сателітів або їх блоків на кожну планетарну передачу. Робота базового механізму здійснюється таким чином, Фіг. 18 та 19. Від джерела енергії 110 через контакти і електричні кола у барабані 109, нанесені на скло 112 та/або 113, через обід корпусу 114 подається живлення до електронного блока контролю і управління 127, привід 123, 124, а також системи управління у вигляді кнопок 125, 126 та/або сенсорних елементів. Привід створює момент на шестернях 119 та/або 121 що приводить в обертання вінцеву шестірню на кільцевій шестірні 139 хвилинної планетарної передачі, а також шестерні підвіски 120, 122. Кільцева шестірня 139 приводить в обертання блоки хвилинних шестерень сателітів 138, великі шестерні яких обкочують закріплену сонячну шестірню 137, менші шестерні, у свою чергу, приводять в обертання сонячну шестірню сполучену з кільцевою шестірнею 136 годинної планетарної передачі, яка, у свою чергу, приводить в обертання блоки годинних шестерень сателітів 135, великі шестерні яких обкочують закріплену сонячну шестірню 134, менші шестерні, у свою чергу, приводять в обертання сонячну шестірню сполучену з кільцевою шестірнею 133 денної планетарної передачі, яка, у свою чергу, приводить в обертання блоки денних шестерень сателітів 132, великі шестерні яких обкочують закріплену сонячну шестірню 131, менші шестерні, у свою чергу, приводять в обертання сонячну шестірню сполучену з кільцевою шестірнею 130 тижневої планетарної передачі, вона приводить в обертання сателітні шестерні або блоки шестерень 129, які обкочуються по зафіксований сонячній шестірні 128. Управління годинником може здійснюватись кнопками розташованими на корпусі годинника Фіг. 18, та/або сенсорами з чутливими елементами або на корпусі, барабані або стеклах годинника. Кнопки 125, 126 складаються принаймні з ізоляційного корпусного елемента в якому розташовані пружинні пластинчаті контакти з виводами і натискним елементом з ізолятором, що впливає на один з контактів для комутації з другим. Робота ж, сенсорних елементів може бути заснована на резистивному, ємнісному або проекційно-ємнісному принципі. Управління годинником має на увазі установку позицій планетарного механізму для розташування шестерень сателітів відповідно до заданого часу. У режимі роботи годинника параметри приводу здебільшого мають на увазі кратну кількість тактів в секунду, при цьому він може працювати в двох напрямах, тобто годинник можна використати з двох сторін. Під установкою часу мається на увазі функція роботи приводу на підвищених швидкостях, що дозволить швидко встановити позиції годинника. У центрі планетарного механізму у барабані 109 замість джерела енергії описаного вище варіанта може розташовуватися генератор з інерційним сектором для заряду джерела енергії, та принаймні одна з його стінок може бути виконана прозорою для візуалізації дії коливань інерційного сектора. Джерело енергії в цьому випадку може розташовуватися як в корпусі годинника, так і у браслеті з використанням поворотних циліндричних елементів з гнучкими провідниками або ковзними контактами для створення загального електричного кола між джерелом енергії і блоком управління годинника. Оскільки в наручному годиннику кріплення браслета мається на увазі з двох сторін корпусу, то і можлива реалізація електро-механічних годинників з двома джерелами енергії, розташованими в його браслеті. Приклад виконання механічного годинника, в якому зубчастий механізм відліку секунд, хвилин, годин та днів тижня виконано у вигляді вкладених коаксіальних планетарних передач, показаний на Фіг. 20-23. З корпусом годинника 140 сполучені стекла 141 та 142, та на їх внутрішніх отворах розташовані підшипникові втулки 143 та 144, в яких обертається циліндричний поворотний барабан, що складається з кілець 145, 146 та сполучених з ними: стекол візуалізації заводу 147, 148 і барабанного вала 149 із сполученим з ним внутрішнім кінцем заводною пружиною 150, як джерела енергії. Зовнішній кінець заводної пружини 150 закріплений на втулці 151 з вінцевою сонячною шестірнею конічної планетарної передачі. Шестерні-сателіти 152 з осьовою фіксацією на водилі 153, притискаючись кришками 154, знаходяться в зачепленні з сонячною шестірнею на втулці 151 і кільцевою шестірнею 155. На водилі 153 також розташована зсередини заскочка 156 притиснута пружиною 157, а зовні, притиснутий пружиною 158 зубчастий важіль 159 з розташованим на ньому поворотною заскочкою 160. Внутрішня заскочка 156 входить в зачеплення з зубчастим колесом, сполученим з кільцем 146, реалізовуючи заскочний механізм, який прослизає при скручуванні заводної пружини 150 і провертає водило 153, яке за допомогою шестерень сателітів 152 заводить 10 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 пружину 150. Зовнішня заскочка 160 входить в зачеплення з зубчастим колесом, розташованим усередині сонячної шестірні 161 тижневої планетарної передачі. Це заскочне зачеплення не дає провертатися водилу 153 при роботі механізму, реалізовуючи редукцію від сонячної шестірні на втулці 151, шестернями 152 до кільцевої шестірні 155, а також при заводі пружини 150 прослизає, реалізуючи диференціал для безупинного приводу годинникового механізму. Між кільцевою шестірнею 155 і підшипниковою втулкою 144 може розташовуватися підшипник. Заскочні механізми на водилі 153 можуть бути спареними, розташовуючись діаметрально протилежно для розподілу навантаження, при цьому зусилля на них зменшиться і відповідно їх конструкційні параметри спростяться. Також рекомендується використання чотирьох шестерень сателітів 152 для більш рівномірної роботи механізму і розподілу навантажень. Кільцева шестірня 155 має сполучення з кільцевою підшипниковою шестірнею 162 за допомогою прозорого диска 163. Ця кільцева шестірня 162 має зубчасте зачеплення з однією з підшипникових шестерень кожного з блоків сателітів 164, які входять в зачеплення із фіксованою сонячною підшипниковою шестірнею 165, а також з рухомою сонячною підшипниковою шестірнею 166, реалізуючи дворядну денну планетарну передачу. шестірня 166 сполучена з кільцевою підшипниковою шестірнею тижневої планетарної передачі, що має підшипникові шестерні-сателіти 167, які обкочують їх сонячну підшипникову шестірню 161. З іншого боку кільцева підшипникова шестірня 162 сполучена з сонячною підшипниковою шестірнею годинної планетарної передачі, що входить в зачеплення з блоками підшипникових шестерень сателітів 168, які також входять в зачеплення із фіксованою підшипниковою сонячною шестірнею 169 і кільцевою підшипниковою шестірнею 170. Кільцева шестірня 170 годинної планетарної передачі має проковзне з'єднання, з прослизанням при певній силі, з сонячною підшипниковою шестірнею 171 хвилинної планетарної передачі. На Фіг. 17 зображено деталювання пропонованого фрикційного з'єднання як проковзного. Від сонячної шестірні 171 через блоки підшипникових шестерень сателітів 172, що входять також в зачеплення із зафіксованою сонячною підшипниковою шестірнею 173, приводиться в обертання водило 174, на якому розташований принаймні один регулятор ходу, що складається з системи балансспіраль 175, анкера з палетами 176 та анкерного колеса 177 сполученого у блок з шестірнею 178 що входить в зачеплення з шестірнею 179, сполученою з корпусом годинника 140. Також можуть бути реалізовані варіанти без шестірні 179 з зачепленням шестірні 178 з кільцевою підшипниковою шестірнею 173 або 171. Регулятор ходу кріпиться в опорах на водилі 174 з мостами 180. З осьовою фіксацією на водилі 174 підшипникові шестерні 181 та блоки підшипникових шестерень 172 підтримують його в коаксіальному русі планетарної передачі. У пропонованому механізмі зображений варіант виконання годинникового механізму з двома регуляторами ходу розташованими діаметрально протилежно один до одного на водилі хвилинної планетарної передачі. Коливання балансів відбуваються в резонансі для підвищення точності і урівноваження механізму. У разі використання одного регулятора ходу водило повинно бути урівноважено вантажем або потовщеною його конструкцією з діаметрально протилежного боку. Також, із-за конструктивних і розрахункових особливостей пропонується використати два блоки підшипникових шестерень сателітів 172 та дві підшипникові шестернісателіти 181, що здійснюють оберт в п'ять секунд, при цьому хоч би одна з них може бути декорована стрілкою для більш наочного визначення часу. Фіксація сонячних шестерень планетарного механізму: 161, 165, 169, 173 має на увазі сполучення з одним із годинникових стекол безпосередньо або через деталь на ньому, або на додатковій основі розташованій між стеклами 141 та 142. Так центральна сонячна шестірня 161 сполучена з втулкою 143, а ще три сонячні шестерні 165, 169, 173 - з годинниковим склом 141. Механізм працює таким чином, заводна пружина 150, зафіксована на нерухомому барабанному валу 149, розкручуючись, подає момент сили на втулку 151, що вільно обертається, та яка вінцевою шестірнею передає момент на шестерні-сателіти 152 з осьовою фіксацією на нерухомому водилі 153. Заскочні механізми запобігають обертанню, проти моменту сили, водила 153 та барабана з валом 149. Шестерні-сателіти 152 приводять в обертання кільцеву шестірню 155, яка через диск 163 передає крутильний момент на сонячну шестірню 162, яка в парі із зафіксованою кільцевою шестірнею 169 приводить в обертання годинні блоки шестерень сателітів 168. Сателіти 168 передають момент і роблять мультиплікацію частоти обертання на кільцеву шестірню 170, яка через проковзне з'єднання з сонячною шестірнею 171 хвилинної планетарної передачі в парі із зафіксованою сонячною шестірнею 173 надає мультиплікаційне орбітальне обертання блокам сателітів шестерень 172 які через їх зафіксовані осі на водилі 174 передають момент на принаймні один регулятор ходу який знаходиться в зачепленні з одною з сонячних шестерень 171 або 173 або шестірнею 179, встановленою на корпусній деталі, та приводить в рух його балансну систему. З іншого боку 11 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 60 кільцева шестірня 162 робить редукцію на блоки сателітів 164 денної планетарної передачі, які, обкочуючи більшими шестернями зафіксовану сонячну шестірню 165, приводять меншими шестернями в редукційне обертання сонячну шестірню 166, сполучену з кільцевою шестірнею тижневої планетарної передачі. Ця кільцева шестірня зубчастим зачепленням приводить в обертання шестерні-сателіти 167, що обкочують сонячну шестірню 161, та здійснюють один орбітальний оберт раз на тиждень. Завод годинникового механізму здійснюють при обертанні барабана, складеного з позицій 145-149, що обертається в підшипникових втулках 143 та 144. Цей барабан при обертанні проти годинникової стрілки, прослизаючи в заскочному механізмі: зубчастого колеса на кільці 146 і заскочки 156, через вал 149 скручує заводну пружину її внутрішнім кінцем, при цьому її зовнішній кінець зафіксований на втулці 151, через розташовану на ньому сонячну шестірню через сателіти як паразитні шестерні 152 приводить в обертання кільцеву шестірню 155 і далі на систему передач годинника. При обертанні барабана за годинниковою стрілкою зубчасте колесо на кільці 146 через заскочку 156 приводить в обертання водило 153 при цьому шестернісателіти 152, обкочуючи майже нерухому кільцеву шестірнню 155, створюють майже подвоєну кутову швидкість обертання на сонячній шестірні втулки 151 відносно водила і відповідно до вала 149, що в цілому скручує заводну пружину з близькою швидкістю до обертання барабана. Таким чином досягається майже рівна сила і швидкість заводу пружини годинникового механізму в обох напрямах. Установка часу годинникового механізму відбувається прискореним обертанням шестерень сателітів годинної та пов'язаної редукцією денної і тижневої планетарної передачі. Його принцип ґрунтується на перевищенні порогу сили зчеплення проковзного з'єднання між рухливими: сонячною шестірнею 171 хвилинної і кільцевою шестірнею 170 годинної планетарної передачі. При обертанні барабана складеного з позицій 145-149 за годинниковою стрілкою більше повного заводу пружини 150 відбувається через заскочне зачеплення зубчастого колеса на кільці 146 і заскочки 156 провертання водила 153, яке через застопорені шестерні-сателіти 152 сонячною шестірнею втулки 151, зведеною пружиною 150 передають підвищений момент сили на кільцеву шестірню 155, яка через диск 163 передає крутильний момент, на сонячну шестірню 162. Шестірня 162 через годинну планетарну передачу створює підвищений момент на кільцевій шестірні 170. У свою чергу, сонячна шестірня 171 хвилинної планетарної передачі обмежена в швидкості обертання принаймні одним регулятором ходу. Таким чином, підвищений момент сили на кільцевій шестірні 170 намагатиметься розірвати зв'язок відносного її обертання сонячної шестірні 171. При перевищенні сили зв'язку, відбуватиметься прослизання шестірні 170 відносно шестірні 171, і відбуватиметься обертання барабана із швидкістю порядку подвоєної швидкості обертання годинних шестерень сателітів відносно осі механізму. При обертанні барабана проти годинникової стрілки та більше повного заводу пружини 150 відбувається перелом з'єднання зубчастого важеля 159 та заскочки 160, що упирається одним зубцем в зубчасте колесо усередині сонячної шестірні 161, а іншим в паз водила 153 при цьому фіксується зубцями на важелі 159 з'єднання водила 153 і кільцевої шестірні 155. Параметри зусилля пружини 158 підбираються так, щоб перелом з'єднання важеля 159 і заскочки 160 відбувався раніше, ніж прослизання шестірні 170 відносно шестірні 171. Таким чином, відбувається блокування моменту заводної пружини 150 і годинник зупиняється. При подальшому підвищенні крутильного моменту барабана годинника проти годинникової стрілки відбувається прослизання шестірні 170 відносно шестірні 171, таким чином можна встановлювати час годинника в обох напрямах. Після закінчення установки годинника в напрямку проти годинникової стрілки для запуску годинникового механізму необхідно трохи провернути барабан за годинниковою стрілкою для вивільнення зубчастого важеля 159 із зачеплення з кільцевою шестірнею 155, при цьому пружиною 158 зубчастий важіль введе в зачеплення заскочку 160 з зубчастим колесом усередині сонячної шестірні 161 і механізм встановиться в режим його годинникової роботи. Використання запропонованого винаходу в аналогових вимірювальних та лічильних приладах значно спрощує їх компонування, за рахунок симетричної та пропорційної вкладеної коаксіальної конструкції. Застосування як основи та/або засобу індикації рухомих шестерень та/або водил планетарних передач призводить до відсутності потреб мостів, корпусних деталей та навіть циферблата, що відділяє механізм від системи індикації. Реалізація кратних відношень частот обертання засобів індикації як в орбітальному, так і круговому русі дозволяє більш детально відслідковувати вимірювальні величини. Застосування шевронного, арочного зачеплення або зубчастих підшипників у складових планетарних передач дає можливість виключити здебільшого підвіску та опори рухомих деталей, що знижає кількість кінематичних 12 UA 113837 C2 5 10 15 зв'язків, та підвищує, жорсткість, точність та ККД механізму. При розміщенні всередині та на периферії планетарного механізму приводів, джерела енергії, допоміжних кінематичних зв'язків, системи управління, та інших пристроїв, сам механізм візуалізації залишається вільним з обох боків, що підвищує його привабливість, та припускає його використання з обох сторін. Також, враховуючи можливість декорування його рухомих деталей, робить даний винахід особливо придатним для використання в годинниковій та ювелірній галузі. ДЖЕРЕЛА ІНФОРМАЦІЇ: 1. Патент WO02/101481 2. Патент US5222051 3. Патент DE 4334646C1 4. Патент WO 2009/112884 5. Патент США № 3675510 6. Патент RU № 2404382 7. Патент США № 2002/0031288 А1 ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 55 1. Зубчастий механізм вимірювального приладу, що містить принаймні корпусну деталь, привід обертання і систему передач, який відрізняється тим, що система передач містить вкладені коаксіальні планетарні передачі, при цьому принаймні одна з них дворядна, з принаймні однією шестірнею-сателітом на кожну з них, а також, одна сонячна або кільцева шестірня кожної з них має сполучення з корпусною деталлю, крім того, як засіб індикації або його безпосередня основа використані принаймні одна рухома шестірня або водило принаймні однієї з цих вкладених планетарних передач принаймні з однієї з її сторін. 2. Зубчастий механізм за п. 1, який відрізняється тим, що принаймні одна планетарна передача має водило, на якому принаймні одна шестірня-сателіт має осьову фіксацію. 3. Зубчастий механізм за будь-яким з пунктів 1-2, який відрізняється тим, що принаймні одна сонячна або кільцева шестірня або водило має осьову фіксацію відносно корпусної деталі. 4. Зубчастий механізм за будь-яким з пунктів 1-3, який відрізняється тим, що принаймні в одній планетарній дворядній передачі принаймні одна пара шестерень-сателітів має сполучення між собою. 5. Зубчастий механізм за будь-яким зпунктів 1-4, який відрізняється тим, що принаймні в одній зовнішній планетарній передачі сонячна шестірня має сполучення з кільцевою шестірнею вкладеної планетарної передачі. 6. Зубчастий механізм за будь-яким з пунктів 1-5, який відрізняється тим, що принаймні в одній зовнішній планетарній передачі сонячна шестірня має сполучення з водилом вкладеної планетарної передачі. 7. Зубчастий механізм за будь-яким з пунктів 1-6, який відрізняється тим, що принаймні в одній зовнішній планетарній передачі водило має сполучення з кільцевою шестірнею вкладеної планетарної передачі. 8. Зубчастий механізм за будь-яким з пунктів 1-7, який відрізняється тим, що принаймні в одній дворядній планетарній передачі шестерні-сателіти попарно мають осьову фіксацію відносно одна одної. 9. Зубчастий механізм за п. 8, який відрізняється тим, що дві кільцеві або сонячні шестерні принаймні однієї з планетарних передач мають сполучення між собою. 10. Зубчастий механізм за п. 8, який відрізняється тим, що принаймні в одній з планетарних передач дві кільцеві або дві сонячні шестерні з вінцевими шестернями на кожній з них мають зв'язок через зубчасті передачі з шестернями, що мають осьову фіксацію відносно корпусної деталі. 11. Зубчастий механізм за п. 8, який відрізняється тим, що принаймні в одній з планетарних передач дві кільцеві або дві сонячні шестерні з вінцевими шестернями на кожній з них мають не менше двох роздільних зубчастих передач з функцією перемикання їх зчеплення в кінематичному зв'язку. 12. Зубчастий механізм за будь-яким з пунктів 1-11, який відрізняється тим, що принаймні одне: водило, кільцева або сонячна шестірня, має вінцеву шестірню, яка входить в зачеплення з принаймні однією шестірнею, що має осьову фіксацію відносно корпусної деталі. 13. Зубчастий механізм за будь-яким з пунктів 1-12, який відрізняється тим, що принаймні одна шестірня або водило має сполучення з приводом обертання. 13 UA 113837 C2 5 10 15 20 25 30 35 40 45 50 55 14. Зубчастий механізм за будь-яким з пунктів 1-13, який відрізняється тим, що принаймні одне сполучення виконане як цілісне або збірне жорстке з'єднання деталей. 15. Зубчастий механізм за будь-яким з пунктів 1-14, який відрізняється тим, що принаймні одне сполучення виконане як проковзне з принаймні заданим моментом зчеплення та/або прослизання. 16. Зубчастий механізм за п. 15, який відрізняється тим, що проковзне сполучення виконано у вигляді фрикційної пружинної гофрованої прокладки, розміщеної в пазах концентричних деталей, при цьому поверхні, що знаходяться у фрикційному контакті, виконані або гладкими, або з рифленнями. 17. Зубчастий механізм за будь-яким з пунктів 1-16, який відрізняється тим, що принаймні на одній рухомій шестірні або водилі, як на основі, нанесений засіб індикації. 18. Зубчастий механізм за будь-яким з пунктів 1-17, який відрізняється тим, що принаймні один циферблат виконаний у вигляді цифр та/або міток шкали поділок на поверхні принаймні однієї з корпусних деталей. 19. Зубчастий механізм за будь-яким з пунктів 1-18, який відрізняється тим, що принаймні одна з його планетарних передач прилягає до корпусної деталі. 20. Зубчастий механізм за будь-яким з пунктів 1-19, який відрізняється тим, що зубці принаймні однієї пари шестерень виконані шевронними або арочними. 21. Зубчастий механізм за будь-яким з пунктів 1-20, який відрізняється тим, що в ньому принаймні одне зубчасте зачеплення складене з підшипникових шестерень у вигляді шестерень з розташованими з двох сторін циліндричними роликами діаметрів, що відповідають діаметру ділильного кола цих шестерень. 22. Зубчастий механізм за пунктом 21, який відрізняється тим, що торцеві поверхні зубців підшипникових шестерень виконані скошеними поверхнями з твірної профілів зубців витягнутої по циліндричній гвинтовій лінії навколо осі шестерень до середини їх зубців, які симетричним витягуванням поширені заглибинами в торцеві коаксіальні ролики до середини заглибини зубців з двох торців, при цьому попарно спряжені в зачепленні торці зубців підшипникових шестерень і заглибини на їх роликах утворені гвинтовими лініями рівного радіуса з кроком, пропорційним передатному відношенню зачеплення. 23. Зубчастий механізм за пунктом 21, який відрізняється тим, що зубці підшипникових шестерень в них виконані за п. 20, при цьому торці зубців виконані за п. 22, або ширина зубців менше заглибин між роликами. 24. Зубчастий механізм за будь-яким з пунктів 21-23, який відрізняється тим, що принаймні одна підшипникова шестірня виконана у вигляді єдиної деталі. 25. Зубчастий механізм за будь-яким з пунктів 21-23, який відрізняється тим, що принаймні одна підшипникова шестірня в ньому виконана складеною з жорстким з'єднанням. 26. Зубчастий механізм за будь-яким з пунктів 1-25, який відрізняється тим, що в центрі планетарного механізму встановлено барабан з принаймні однією прозорою стінкою або знімною кришкою. 27. Електронно-механічний годинник, що містить принаймні корпус, зубчастий механізм, електронний блок, привід та джерело енергії, який відрізняється тим, що в ньому зубчастий механізм виконано відповідно до пунктів 1-26. 28. Електронно-механічний годинник за п. 27, який відрізняється тим, що в його барабані розташоване джерело енергії. 29. Електронно-механічний годинник за п. 27, який відрізняється тим, що в барабані розташований генератор з інерційним сектором, а принаймні одне джерело енергії розміщено або в корпусі годинника та/або в його браслеті. 30. Електронно-механічний годинник за будь-яким з пунктів 27-29, який відрізняється тим, що електричні кола розміщені в барабані та на корпусних елементах, а електронний блок, системи управління та привід розміщені принаймні на одному з корпусних елементів. 31. Електронно-механічний годинник за будь-яким з пунктів 27-30, який відрізняється тим, що як привід встановлено принаймні один кроковий двигун. 32. Електронно-механічний годинник за будь-яким з пунктів 27-31, який відрізняється тим, що на принаймні одному корпусному елементі розташовані кнопки або сенсорні елементи управління годинником. 33. Механічний годинник, що містить принаймні корпус, зубчастий механізм, регулятор ходу та барабан з заводною пружиною, який відрізняється тим, що в ньому зубчастий механізм виконано відповідно до пунктів 1-26, а барабан з закріпленою на його осі заводною пружиною встановлено з осьовою фіксацією відносно корпуса годинника. 14 UA 113837 C2 5 10 34. Механічний годинник за п. 33, який відрізняється тим, що його заводна пружина зовнішнім кінцем має сполучення з сонячною шестірнею конічної планетарної передачі, водило якої має принаймні одну шестірню-сателіт та принаймні одне заскочне зачеплення з зубчастим колесом на корпусній деталі та/або барабані, при цьому її кільцева шестірня жорстко пов'язана з однією з сонячних шестерень або водилом вкладених планетарних передач годинника. 35. Механічний годинник за п. 34, який відрізняється тим, що принаймні одне заскочне зачеплення з корпусною деталлю або поворотним барабаном має важільну конструкцію заскочника з можливістю перемикання зачеплення між зубчастим колесом та шестірнею механізму при заданій силі. 36. Механічний годинник за будь-яким з пунктів 33-35, який відрізняється тим, що на одному водилі розташований принаймні один регулятор ходу цього механізму що має зубчасте зачеплення з рухливою шестірнею або шестірнею, що має коаксіально водилу сполучення з корпусною деталлю. 15 UA 113837 C2 16 UA 113837 C2 17 UA 113837 C2 18 UA 113837 C2 19 UA 113837 C2 20 UA 113837 C2 Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 21
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G04C 3/00, G04B 19/02, G04B 13/00, G04B 45/02, F16H 1/28, F16C 19/50, G04B 33/06
Мітки: годинники, таким, електронно-механічний, приладу, зубчастій, механізм, вимірювального, механічний, механізмом
Код посилання
<a href="https://ua.patents.su/23-113837-zubchastijj-mekhanizm-vimiryuvalnogo-priladu-ta-elektronno-mekhanichnijj-ta-mekhanichnijj-godinniki-z-takim-mekhanizmom.html" target="_blank" rel="follow" title="База патентів України">Зубчастий механізм вимірювального приладу та електронно-механічний та механічний годинники з таким механізмом</a>
Передавальний механізм для сільськогосподарської машини, сівалка і насіннєвий ящик з таким передавальним механізмом
Номер патенту: 81917
Опубліковано: 25.02.2008
Автор: Фрістад Міхаел Ерік
МПК: A01C 19/00, A01C 15/00
Мітки: машини, таким, механізмом, сівалка, передавальним, механізм, передавальний, сільськогосподарсько, насіннєвий, ящик
Формула / Реферат:
1. Передавальний механізм для сільськогосподарської машини (10), який містить гнучкий обертовий привідний вал (40) з першим сполучним елементом (44), редуктор (42), що містить шестеренчасту ділянку (60) і сполучну ділянку (58), яка розташована поза шестеренчастою ділянкою (60) і служить для розміщення сполучного елемента (44), причому шестеренчаста ділянка (60) містить вихідний вал (63) редуктора, яким визначається привідна вісь...
Зубчастий редуктор
Номер патенту: 57033
Опубліковано: 10.02.2011
Автори: Чабан Віталій Васильович, Марченко Анатолій Іванович, Піпа Борис Федорович
МПК: F16H 1/20
Формула / Реферат:
1. Зубчастий редуктор, що містить шестірню та зубчасте колесо, встановлені, відповідно, на ведучому та веденому валах, який відрізняється тим, що додатково обладнаний ведучою шестірнею та проміжним валом, на якому вона встановлена та знаходиться у внутрішньому зачепленні з зубчастим колесом та двома допоміжними шестернями, з'єднаними між собою, одна із яких жорстко закріплена на ведучому валу, а друга - на проміжному валу, при цьому зубчасте...
Електронно-механічний пристрій для обмеження доступу (електронно-механічний замок)
Номер патенту: 94789
Опубліковано: 25.11.2014
Автори: Стелюк Тетяна Яківна, Дудар Олександр Володимирович
МПК: E05B 65/00, E05B 47/00, E05B 49/00
Мітки: електронно-механічний, замок, пристрій, доступу, обмеження
Формула / Реферат:
1. Електронно-механічний пристрій для обмеження доступу (електронно-механічний замок), який складається із захисного корпусу та замикаючого механізму, що містить ригель, пружину, електромагнітну котушку, зв'язану з управлінням замком, який відрізняється тим, що містить блок живлення, з'єднаний дротом з електромагнітною котушкою, замикаючу скобу з вушком для входження і фіксації ригеля, при цьому ригель з одного боку має скошену форму, а...
Важільний комбінований кулачково-зубчастий механізм

Номер патенту: 109995
Опубліковано: 26.10.2015
Автори: Коломієць Андрій Борисович, Полюдов Олександр Миколайович, Кузнецов Владислав Олександрович, Регей Іван Іванович
МПК: F16H 37/12, B26D 5/14, F16H 25/16, F16H 21/40, B26D 5/16
Мітки: механізм, важільний, кулачково-зубчастий, комбінований
Формула / Реферат:
Важільний комбінований кулачково-зубчастий механізм, що містить кривошип, шатун, коромисло, ролик, що ковзає та перекочується в нерухомому профільованому пазу, який відрізняється тим, що кривошип вільно посаджений із нижнім зубчастим сектором на одній осі і шарнірно приєднаний до коромисла та верхнього зубчастого сектора, жорстко з'єднаного з коромислом, а нижній зубчастий сектор додатково шарнірно приєднаний до веденого коромисла за...
Зубчастий редуктор
Номер патенту: 93907
Опубліковано: 27.10.2014
Автори: Місяць Володимир Петрович, Піпа Борис Федорович
МПК: F16H 1/20
Формула / Реферат:
Зубчастий редуктор, що містить ведучий, ведений та проміжний вали з жорстко закріпленими на них шестірнею ведучого вала, зубчастим колесом веденого вала та зубчастим колесом і шестірнею проміжного вала, які кінематично зв'язані між собою, при цьому ведучий та ведений вали розташовані співвісно, який відрізняється тим, що обладнаний додатковим проміжним валом з зубчастим колесом та шестірнею, при цьому додатковий проміжний вал розташований з...
Попередній патент: Спосіб внесення добавок у ґрунт для прискорення проростання насінин, зменшення випаровування води з ґрунту та підвищення урожаю рослин або сільськогосподарських культур
Наступний патент: Антитіло, яке зв’язує мезотелін, та імунокон’югат
Випадковий патент: Антибактеріальний препарат "тилозомікол м 5%, 20%"