Система для визначення та виміру змін в опорі зарядженого тіла
Номер патенту: 44323
Опубліковано: 15.02.2002
Автори: Хаббард Лафайєт Рональд, Маккормік Джон, Стіннетт Річард, Ставропоулос Джеймс

Формула / Реферат
1. Пристрій для індикації змін в опорі живого тіла, який містить схему вимірювання відносно низьких змінних опорів в першому діапазоні та відносно високих змінних опорів в другому діапазоні для отримання виміряного сигналу, причому згадана схема вимірювання має зовнішні виводи, схему підсилення виміряного сигналу до сприймального рівня, підключену до схеми вимірювання опору, індикаторну схему виміряного сигналу в сприймальному вигляді, підключену до схеми підсилення, який відрізняється тим, що містить схемний засіб регулювання чутливості, підключений до схеми підсилення, підключеної до індикаторної схеми для автоматичного підвищення чутливості індикаторної схеми для високого змінного опору в другому діапазоні, виміряного в схемі вимірювання опору.
2. Пристрій за п. 1, який відрізняється тим, що схемний засіб регулювання чутливості виконано з можливістю автоматичного регулювання чутливості індикаторної схеми для низького змінного опору в першому діапазоні, виміряного в схемі вимірювання опору.
3. Пристрій за п. 1, який відрізняється тим, що згаданий схемний засіб регулювання чутливості включає в себе схему керування.
4. Пристрій за п. 1, який відрізняється тим, що згаданий схемний засіб регулювання чутливості включає в себе керований напругою операційний підсилювач.
5. Пристрій для індикації змін в опорі живого тіла, який містить
схему вимірювання опору, яка має зовнішні виводи,
схему підсилення, підключену до схеми вимірювання опору,
індикаторну схему, підключену до схеми підсилення,
схему регулювання чутливості, підключену до схеми підсилення, причому індикаторна схема виконана з можливістю автоматичного підвищення чутливості індикаторної схеми для встановлення високого змінного опору в схемі вимірювання опору, який відрізняється тим, що схема регулювання чутливості включає в себе спарений потенціометр.
6. Пристрій для індикації змін в опорі живого тіла, який містить схему вимірювання опору, яка має зовнішні виводи та регульований вручну потенціометр,
схему підсилення, підключену до схеми вимірювання опору,
індикаторну схему, підключену до згаданої схеми підсилення, який відрізняється тим, що
згадана схема підсилення включає в себе схему калібровки для автоматичного регулювання коефіцієнта підсилення згаданої схеми підсилення у відповідь на переміщення згаданого регульованого потенціометра.
7. Пристрій за п. 6, який відрізняється тим, що додатково включає в себе комп'ютерний інтерфейс для подачі модульованого виміряного сигналу.
8. Пристрій за п. 6, який відрізняється тим, що згадана схема підсилення включає в себе операційний підсилювач, який має конденсатор, підключений в схемі між позитивним та негативним входами в згаданий операційний підсилювач.
9. Пристрій за п. 6, який відрізняється тим, що включає в себе мікропроцесорний пристрій керування в згаданій схемі калібрування,
програмне забезпечення для конфігурування згаданої схеми калібровки при неперервному виявленні змін в регульованому вручну потенціометрі і для визначення та встановлення режиму розділення на основі множини заданих режимів розділення.
10. Пристрій за п. 6, який відрізняється тим, що згадана схема калібровки містить
схему зворотного зв'язку виміряного вхідного сигналу, підключену до схеми вимірювання опору,
схему керування параметром компенсації, підключену до схеми зворотного зв'язку, та
схему компенсації сталої амплітудної характеристики, підключену до схеми керування.
11. Пристрій за п. 10, який відрізняється тим, що згадана схема керування додатково включає в себе
мікропроцесорний пристрій керування, підключений до згаданої схеми зворотного зв'язку, та
аналого-цифровий перетворювач, підключений до згаданої схеми зворотного зв'язку.
12. Пристрій за п. 10, який відрізняється тим, що згадана схема керування додатково включає в себе
схему активації згаданої схеми керування після переміщення згаданого регульованого вручну потенціометра.
13. Пристрій за п. 10, який відрізняється тим, що додатково включає в себе мікропроцесорний пристрій керування, який знаходиться в згаданій схемі керування та підключений до згаданої схеми зворотного зв'язку, і
і програмне забезпечення, яке оперативно керує згаданим мікропроцесорним пристроєм керування.
14. Пристрій за п. 13, який відрізняється тим, що додатково включає в себе схему компенсації та цифровий потенціометр, підключений до згаданої схеми підсилення.
15. Пристрій за п. 6, який відрізняється тим, що згадана схема калібровки включає в себе схему зворотного зв'язку для прийому сигналів, які характеризують опір живого тіла.
16. Пристрій за п. 15, який відрізняється тим, що додатково включає в себе схему керування, підключену до схеми зворотного зв'язку для визначення по згаданому вхідному сигналу компенсаційного сигналу який відповідає зміні коефіцієнта підсилення схеми підсилення.
17. Пристрій за п. 16, який відрізняється тим, що додатково включає в себе схему компенсації для прийому згаданого компенсаційного сигналу та для регулювання згаданої схеми підсилення для підтримання, в основному, сталої амплітудної характеристики.
18. Пристрій для індикації змін в опорі живого тіла, який містить
схему вимірювання опору, яка має виводи, що виходять з неї,
схему підсилення, підключену до схеми вимірювання опору, яка має зовнішні виводи,
індикаторну схему, підключену до схеми підсилення, яка має зовнішні виводи, множину вручну керованих пристроїв, які мають зовнішні виводи,
щонайменше, один вивід, який виходить з кожної із згаданих схем та з кожного із згаданих вручну керованих пристроїв, який з'єднує кожну із згаданих схем одну з одною та зі згаданими вручну керованими пристроями, який відрізняється тим, що містить щонайменше, одну котушку індуктивності, включену в склад схеми вимірювання опору та в склад схеми підсилення,
за рахунок чого зменшується радіозавада, яка проходить через згадані схеми.
19. Пристрій для індикації змін в опорі живого тіла, який містить схему вимірювання опору,
схему підсилення, підключену до схеми вимірювання опору,
індикаторну схему, підключену до схеми підсилення,
який відрізняється тим, що містить корпус, який оточує схему вимірювання опору, схему підсилення та індикаторну схему,
та ізолюючу радіочастоти фарбу, яка покриває корпус.
20. Спосіб підтримання, в основному, сталої амплітудної характеристики для заданого виміряного вхідного сигналу в пристрої для вимірювання змін в опорі живого тіла, яким має схему вимірювання опору, схему підсилення та індикаторну схему, який відрізняється тим, що
ініціалізують згадану схему вимірювання опору та згадану схему підсилення,
під'єднують живе тіло до згаданої схеми вимірювання опору,
встановлюють загальний опір живого тіла, та регулюють коефіцієнт підсилення згаданої схеми підсилення згідно із заданим відношенням, так що для виміряної зміни в опорі забезпечується, в основному, стала амплітудна характеристика.
21. Спосіб за п. 20, який відрізняється тим, що додатково здійснюють ручне регулювання потенціометра як частини встановлення загального опору і встановлення режиму розділення на один із множини заданих режимів розділення для встановлення загального опору живого тіла.
22. Спосіб за п. 21, який відрізняється тим, що додатково здійснюють регулювання коефіцієнта підсилення згаданої схеми підсилення шляхом узгодження сигналів заданого коефіцієнта компенсації із заданими значеннями змін опору, які відповідають змінам в загальному опорі живого тіла.
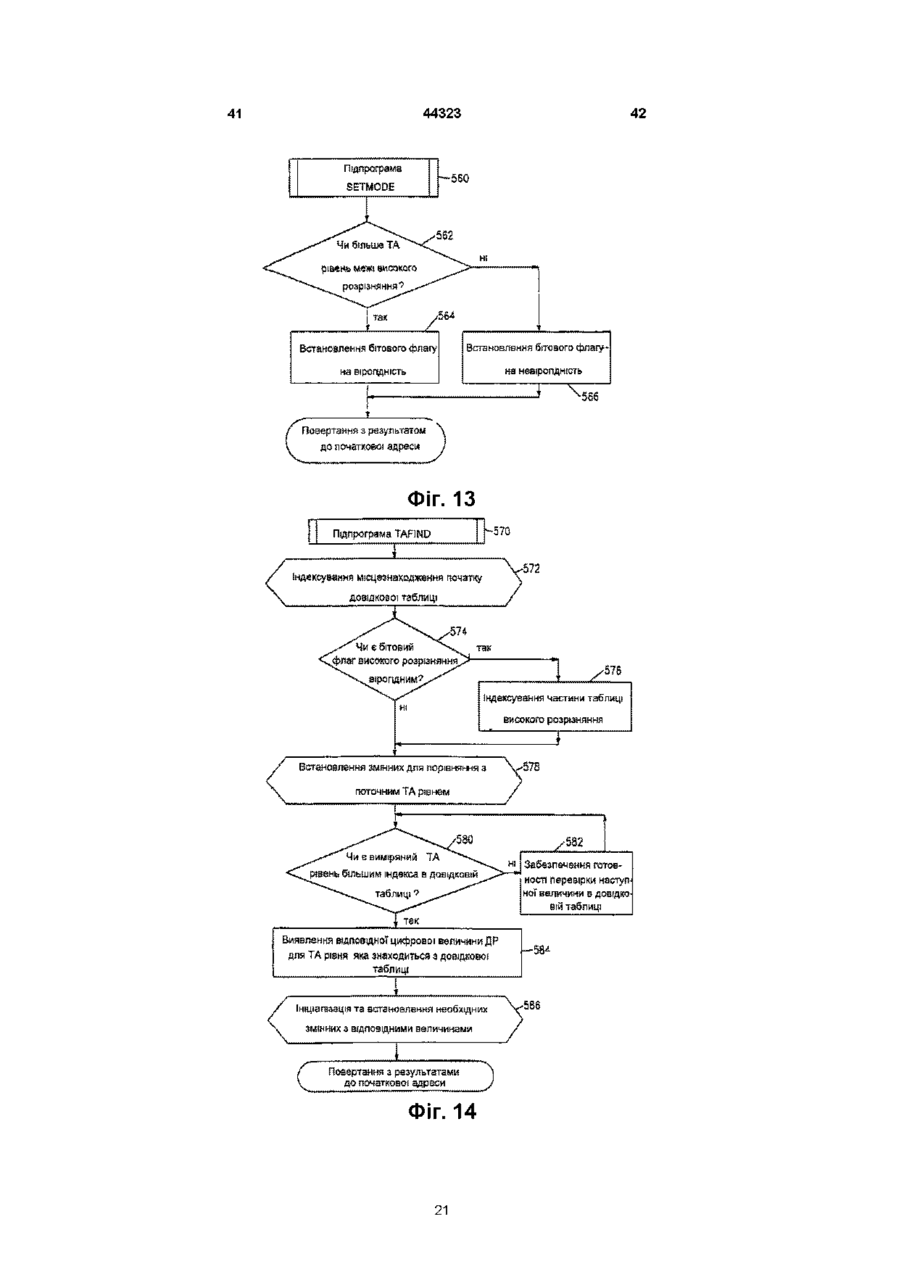
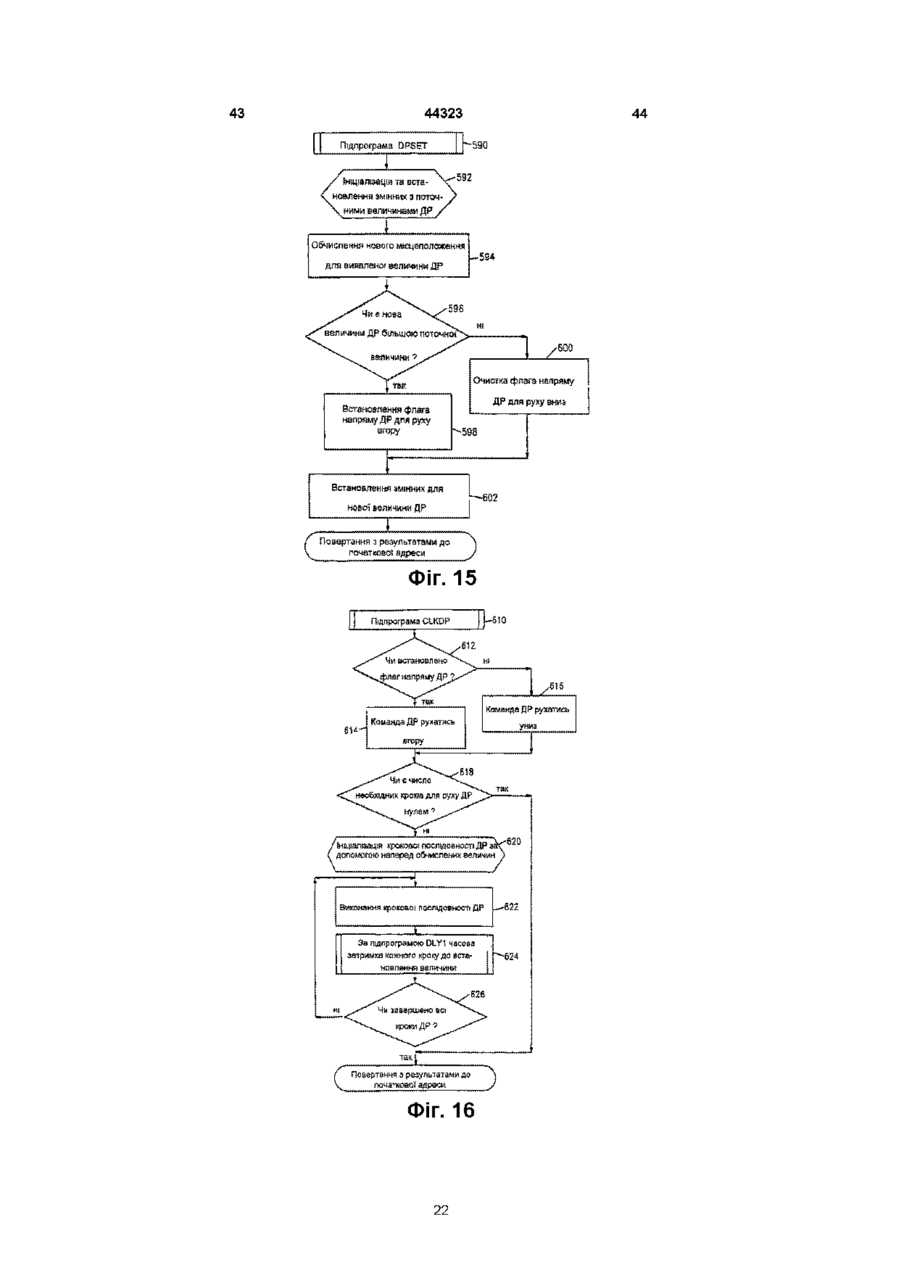
Текст
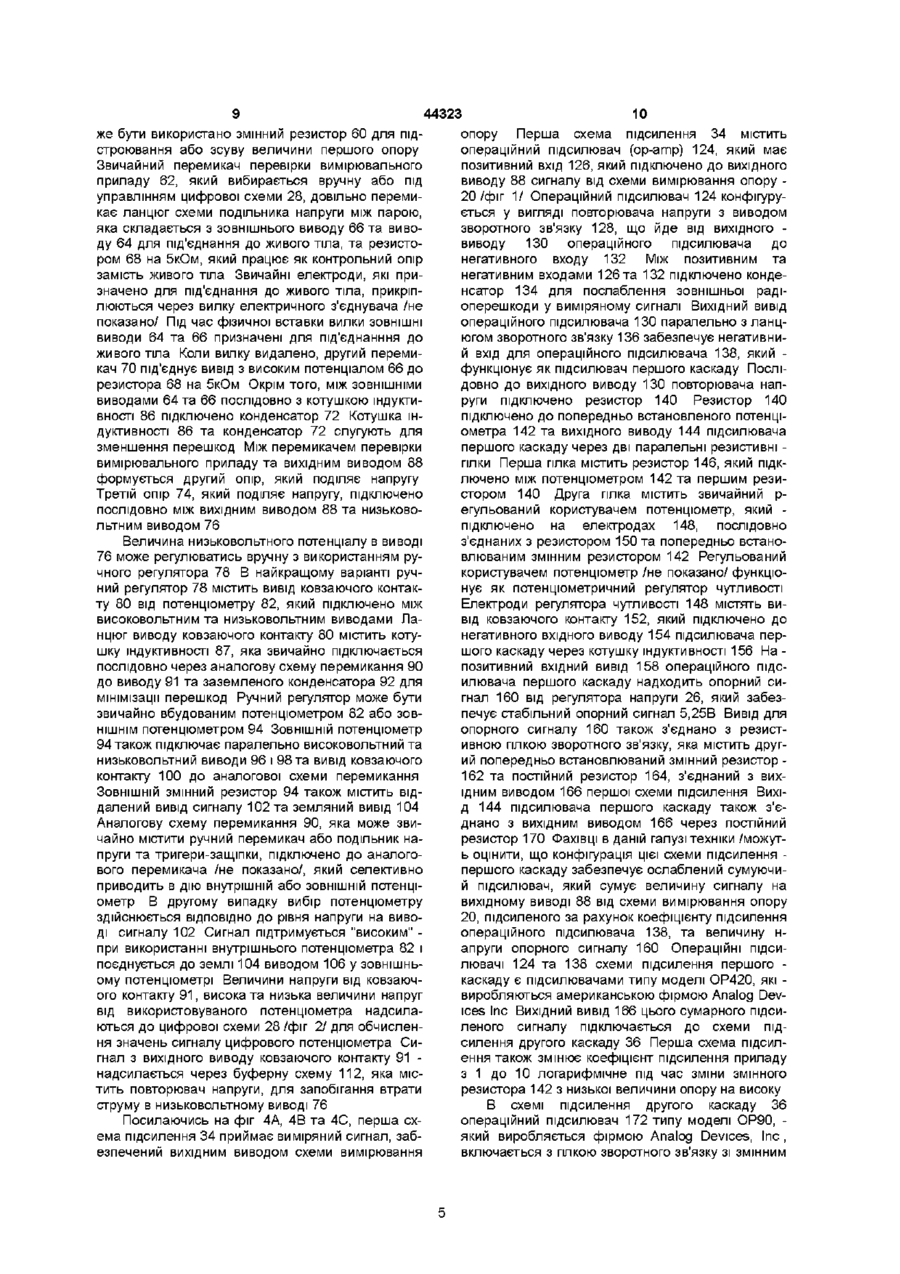
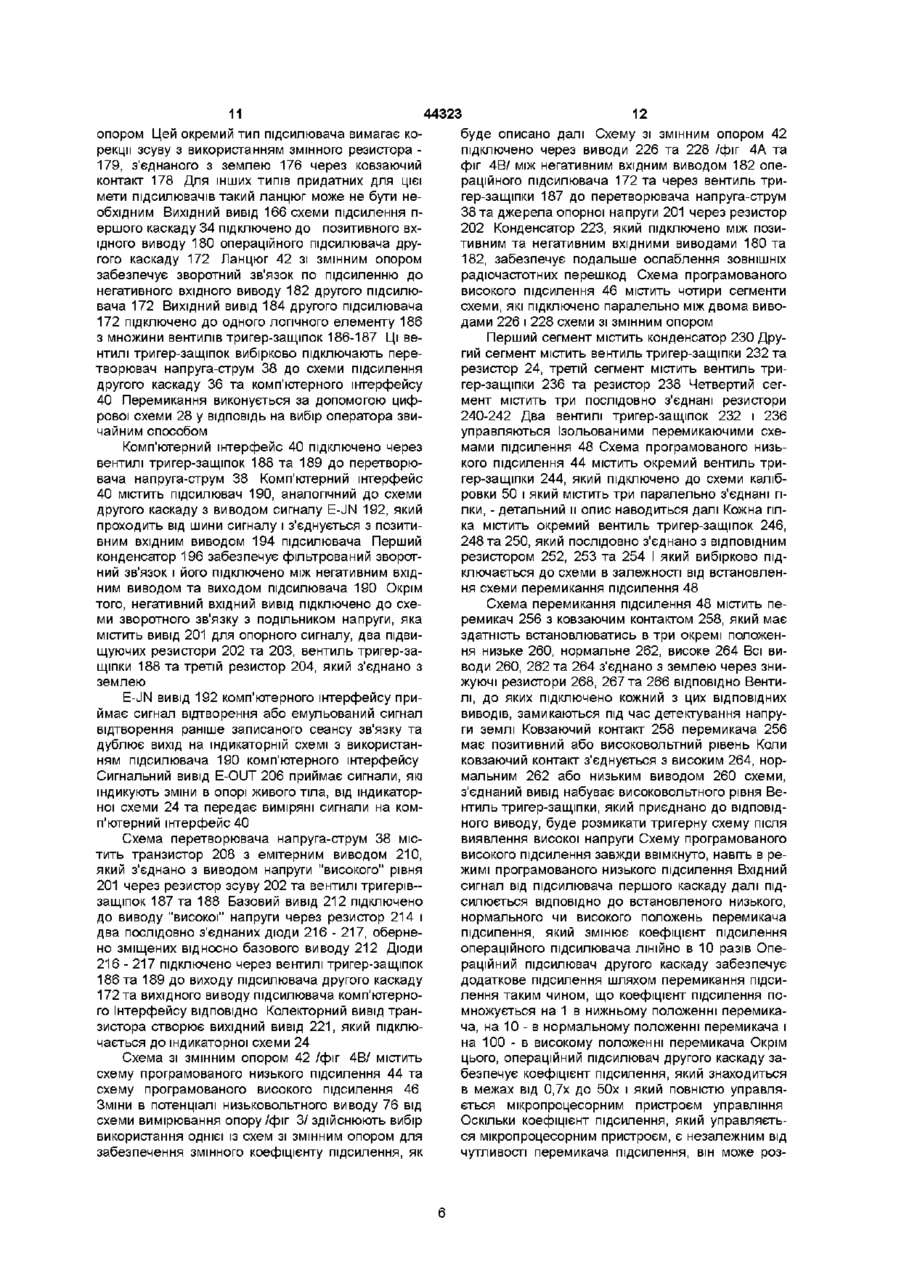
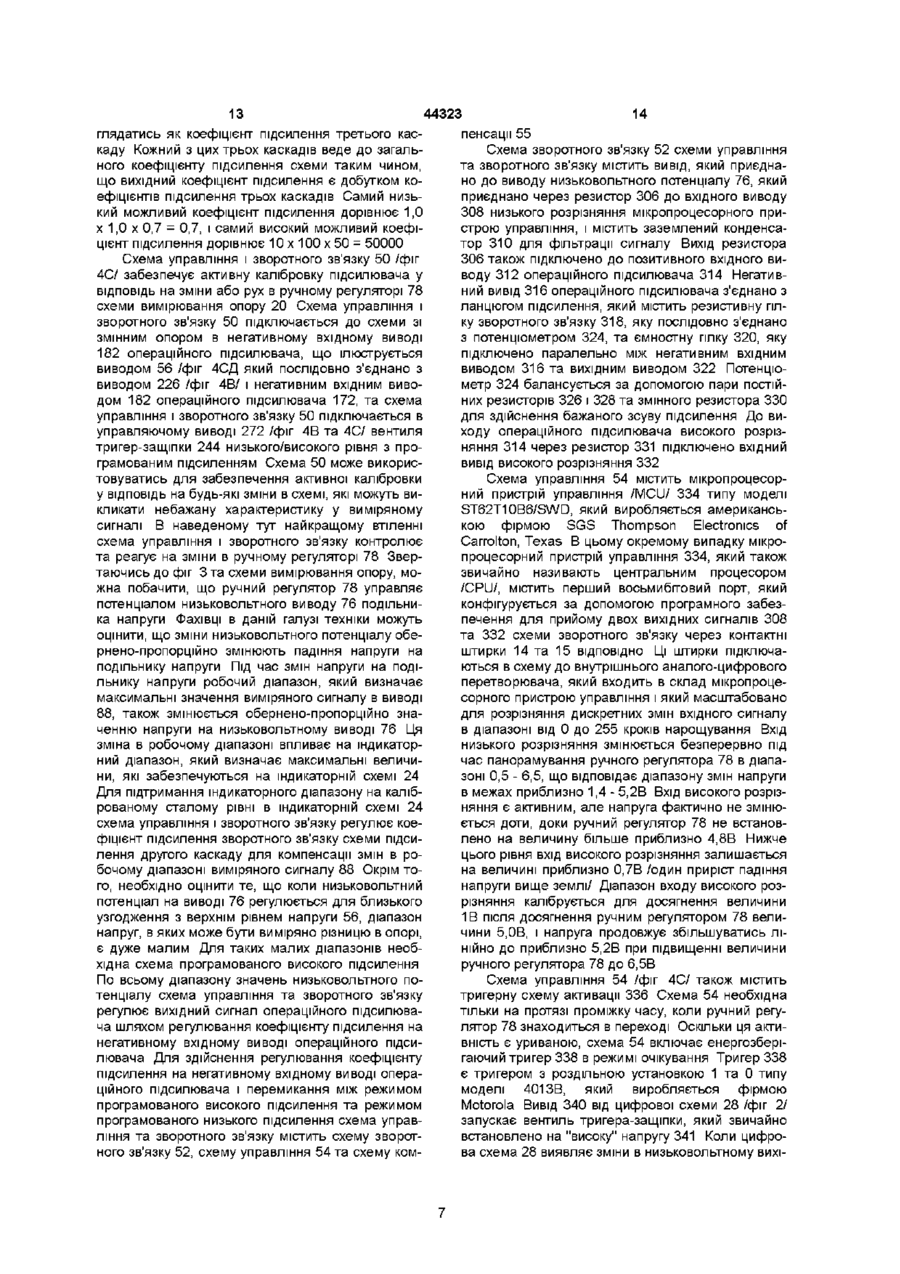
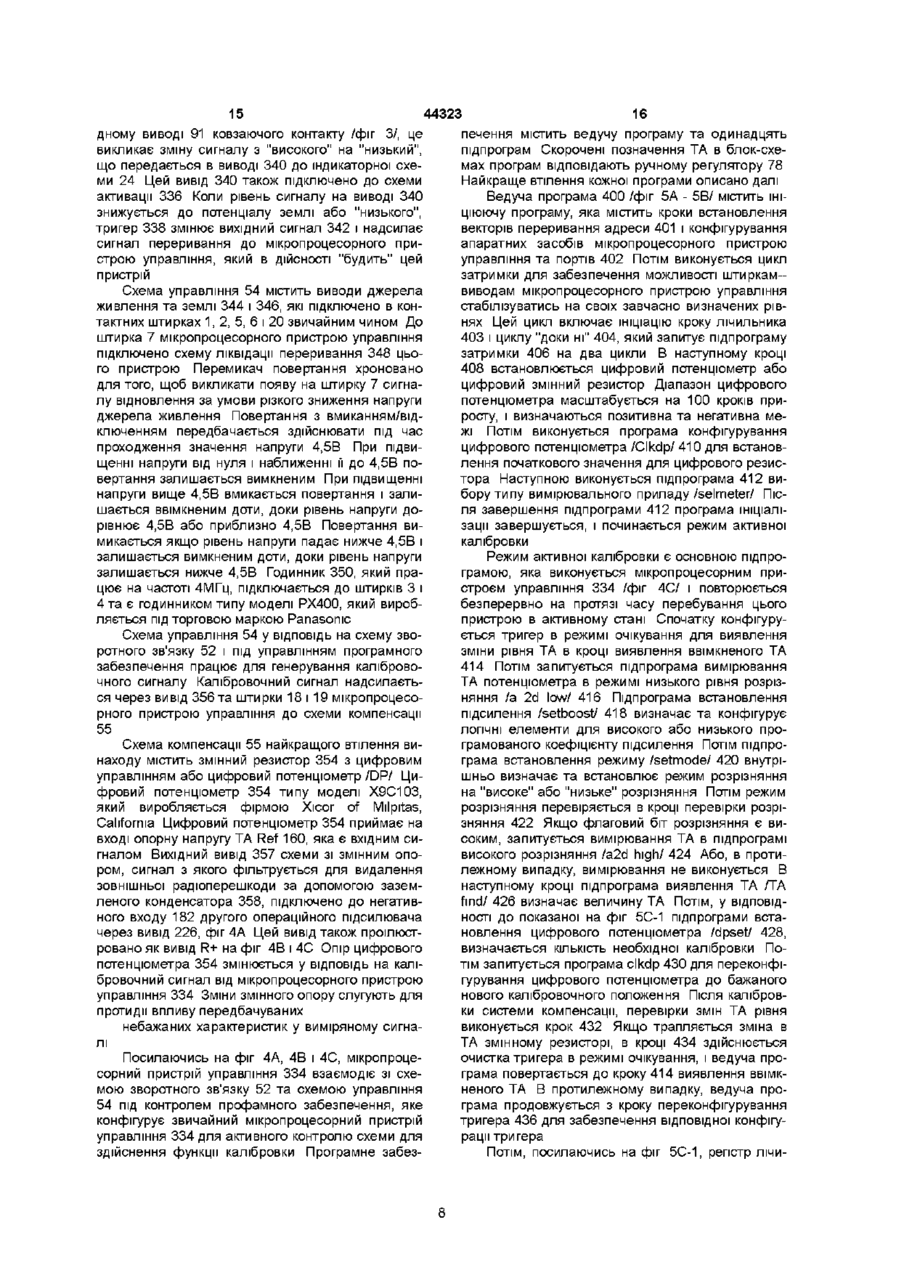
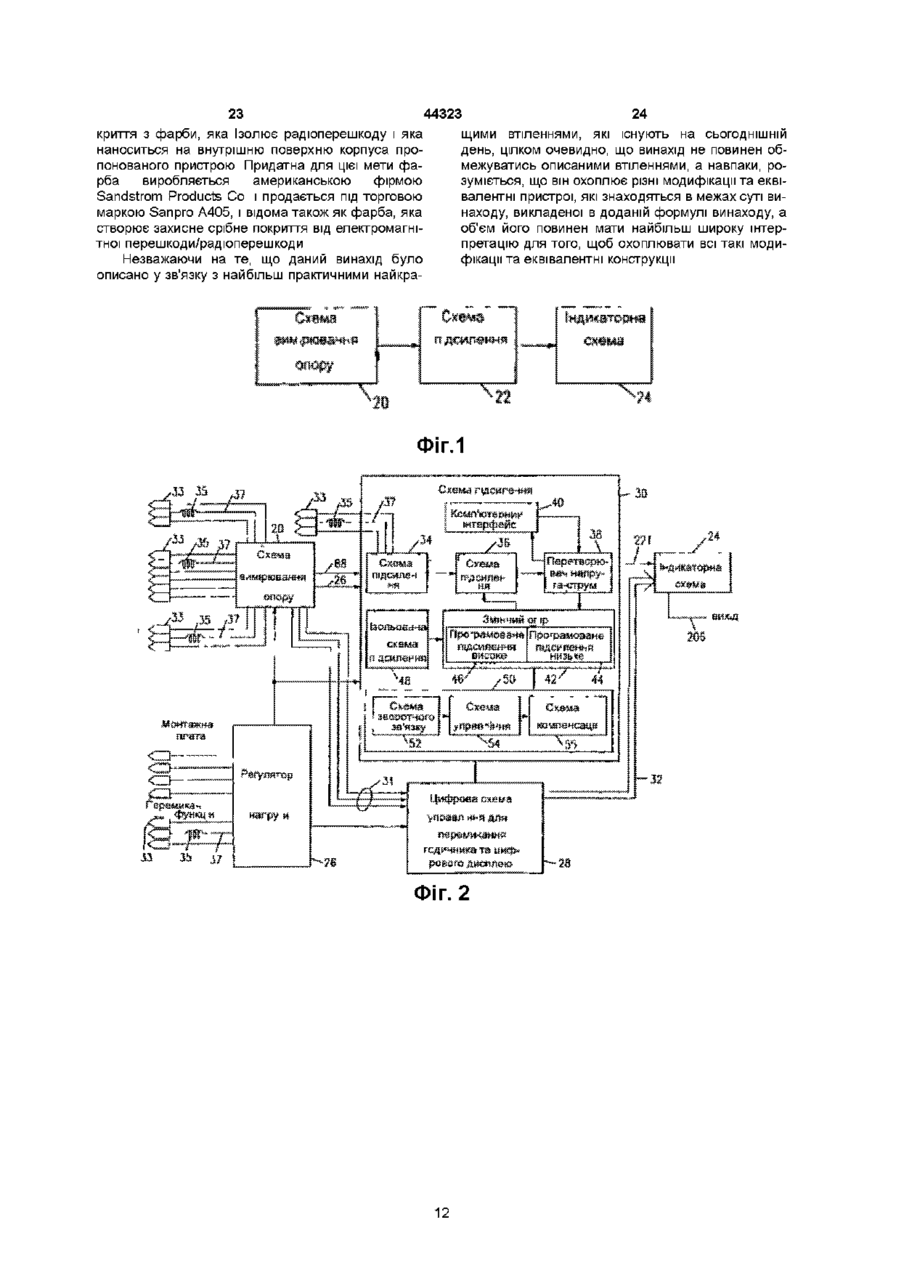
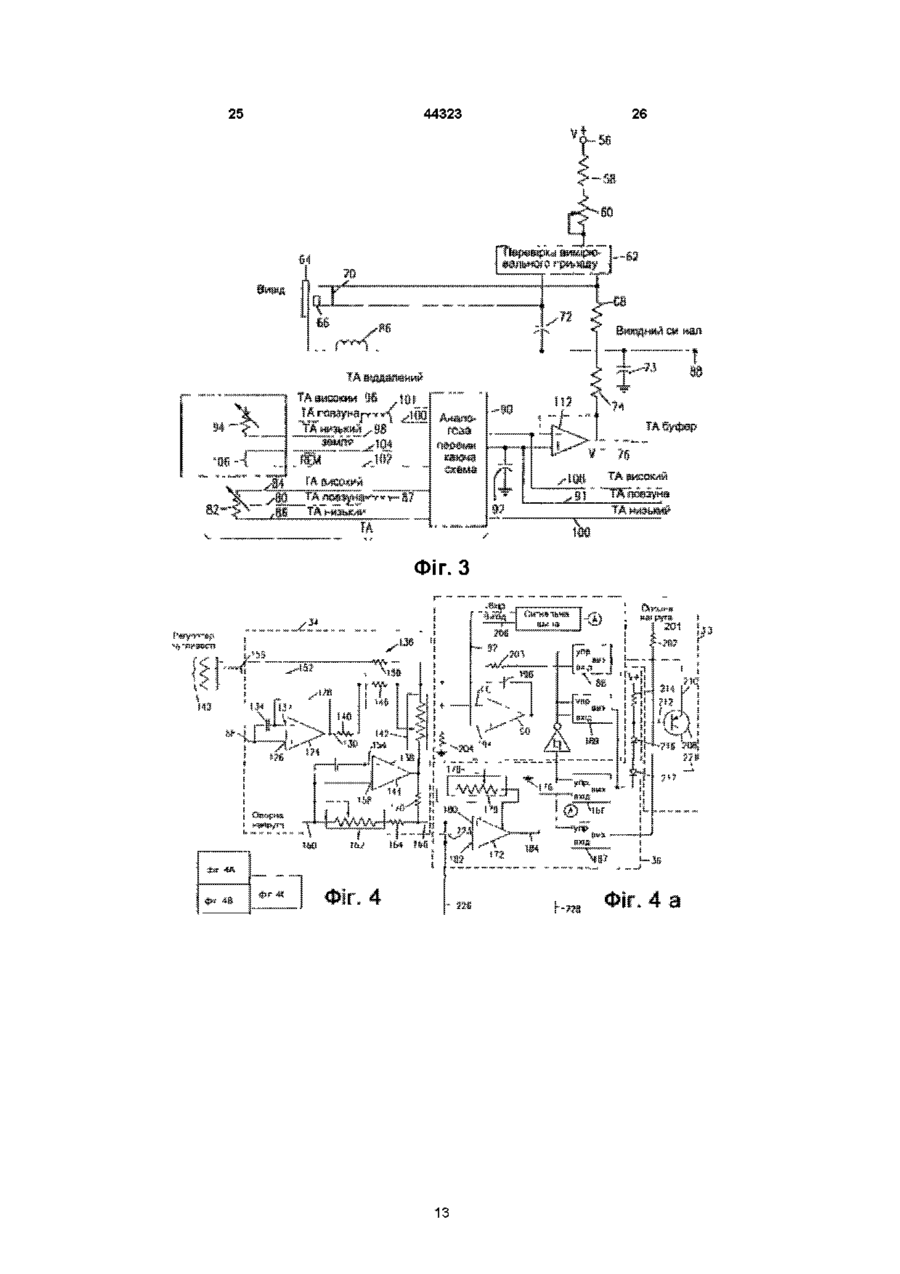
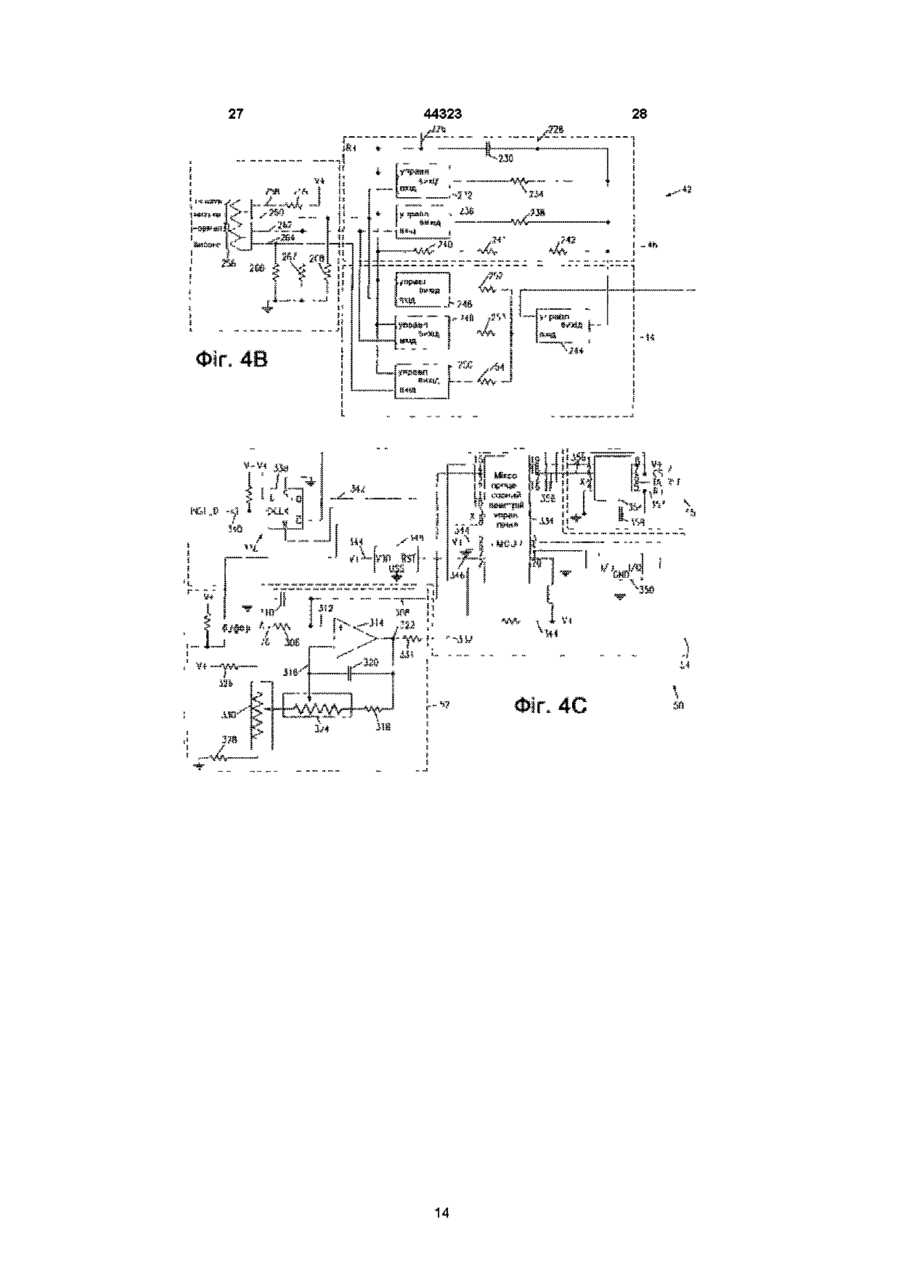
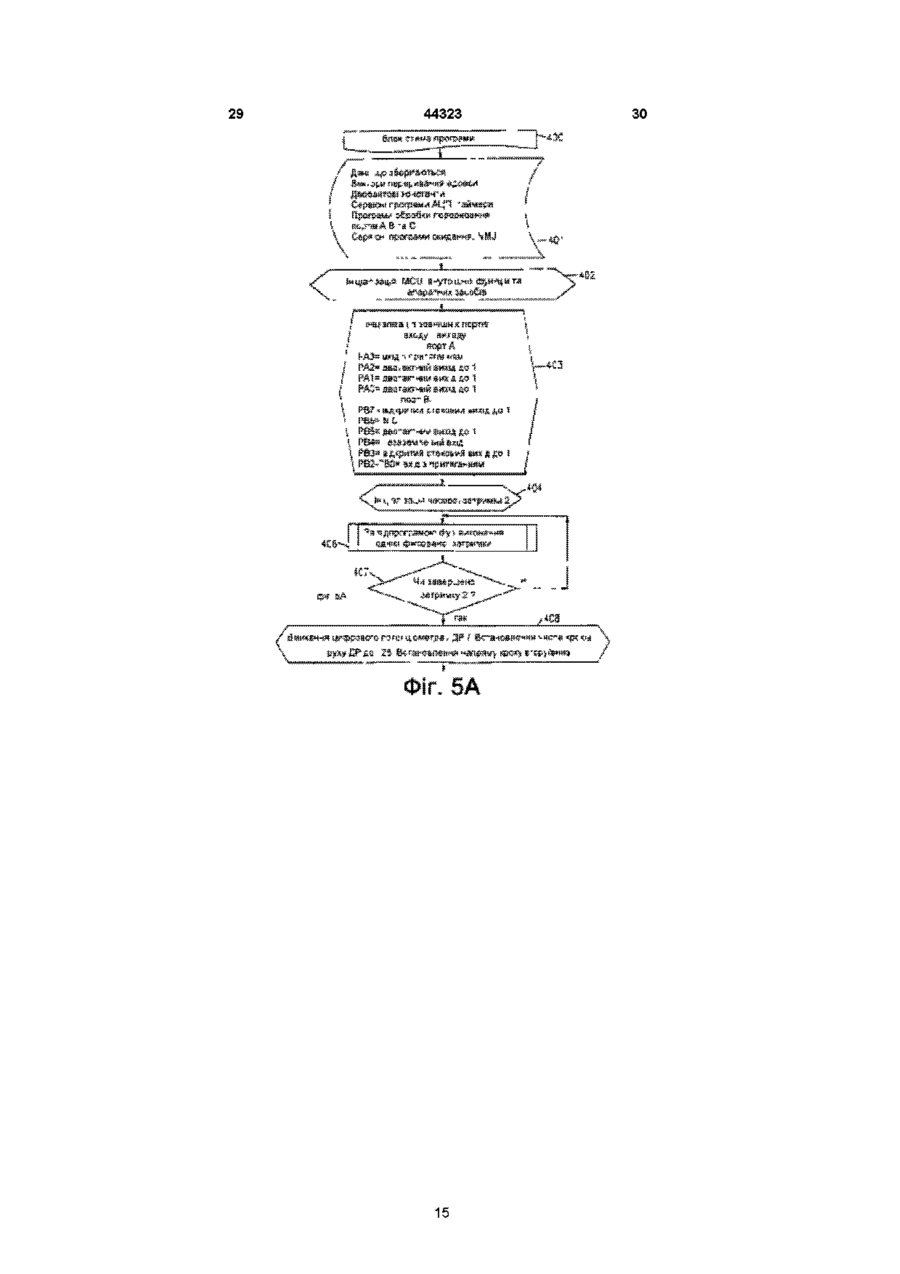
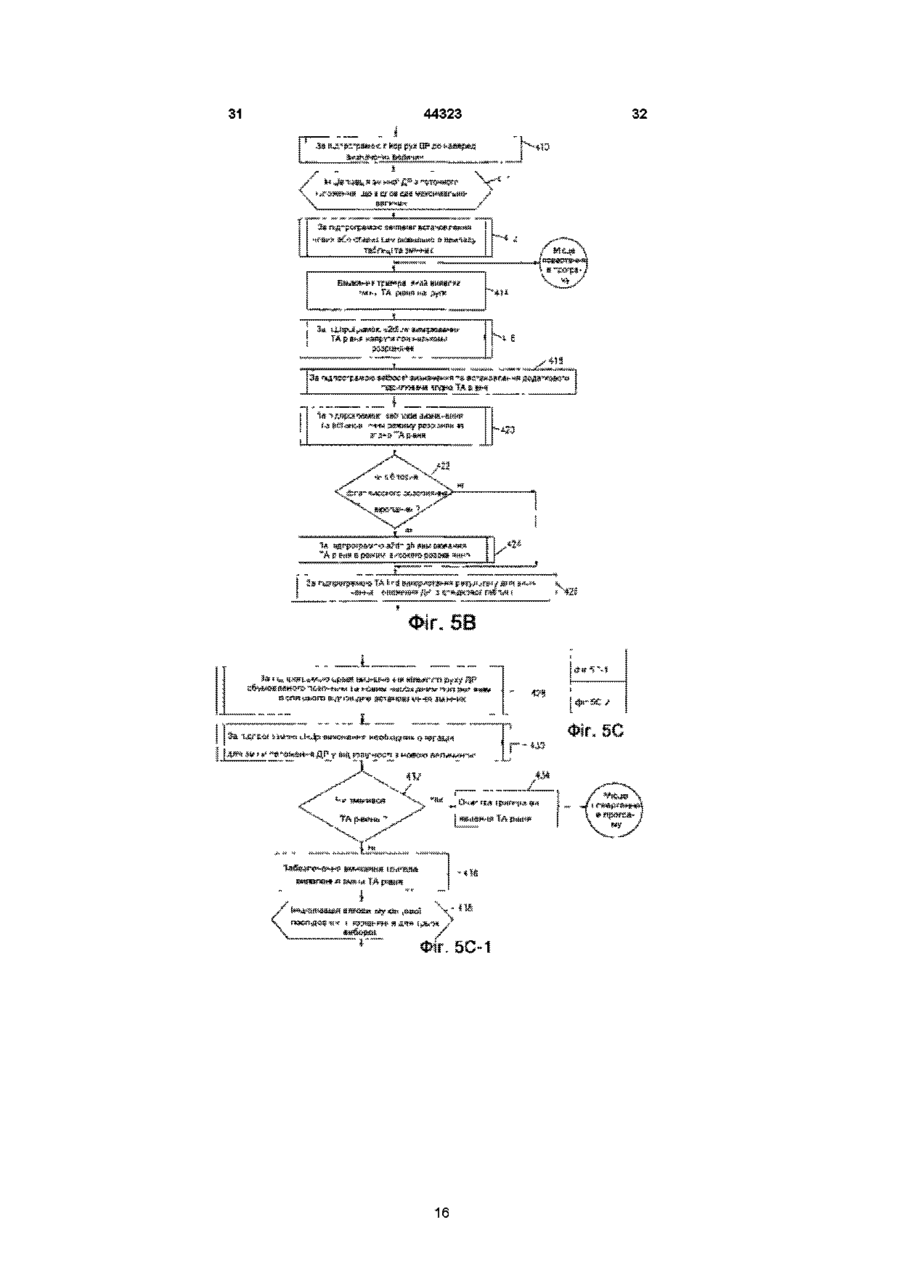
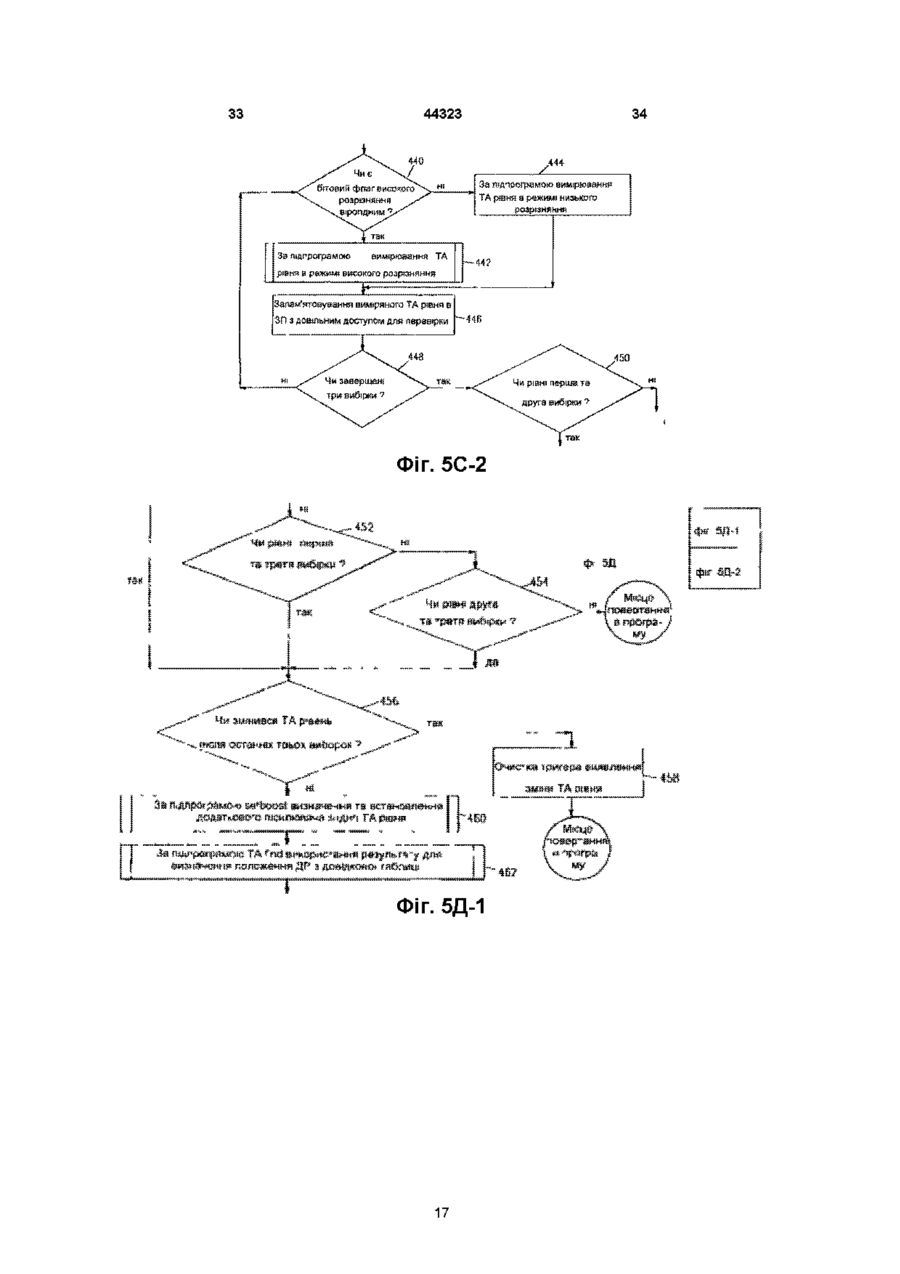
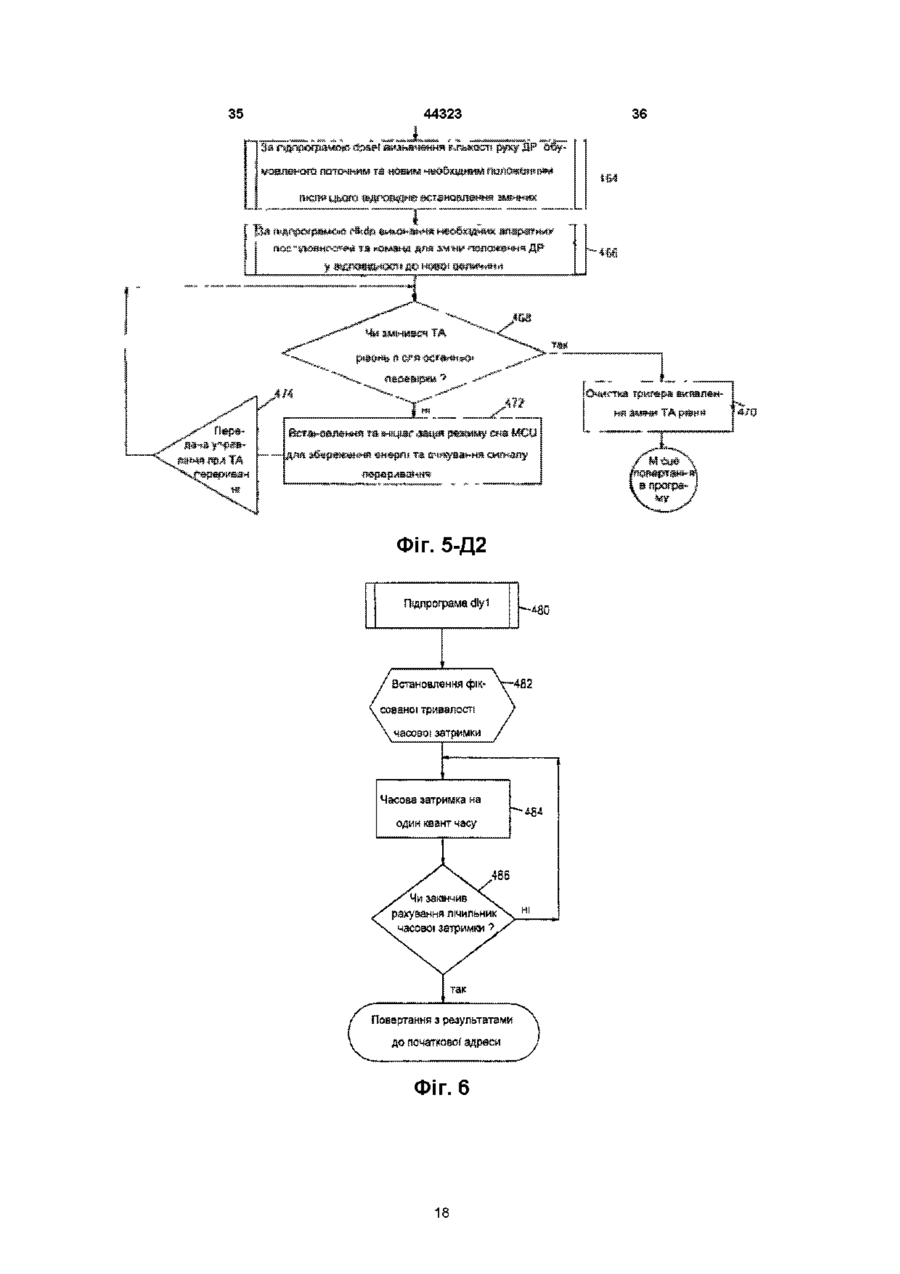
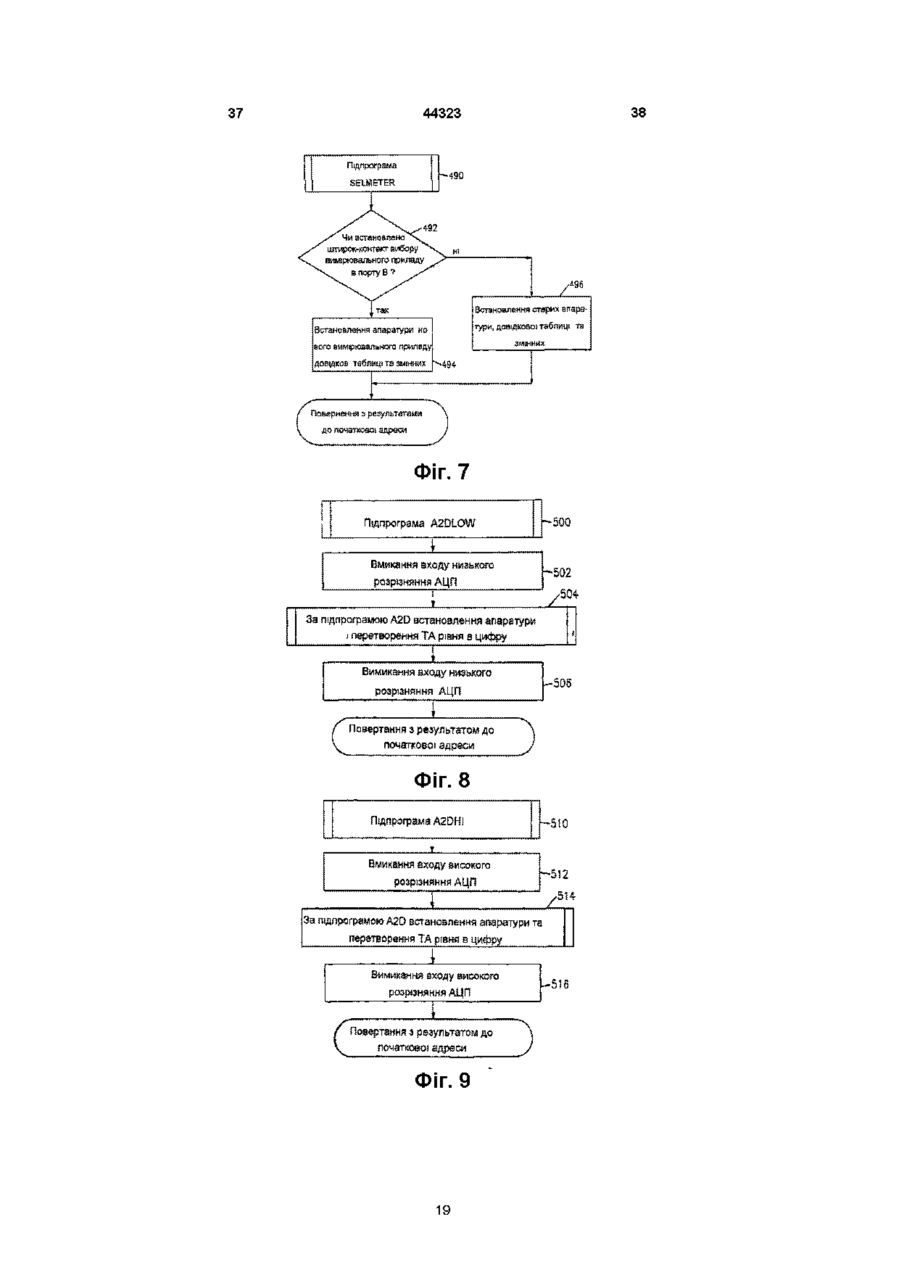
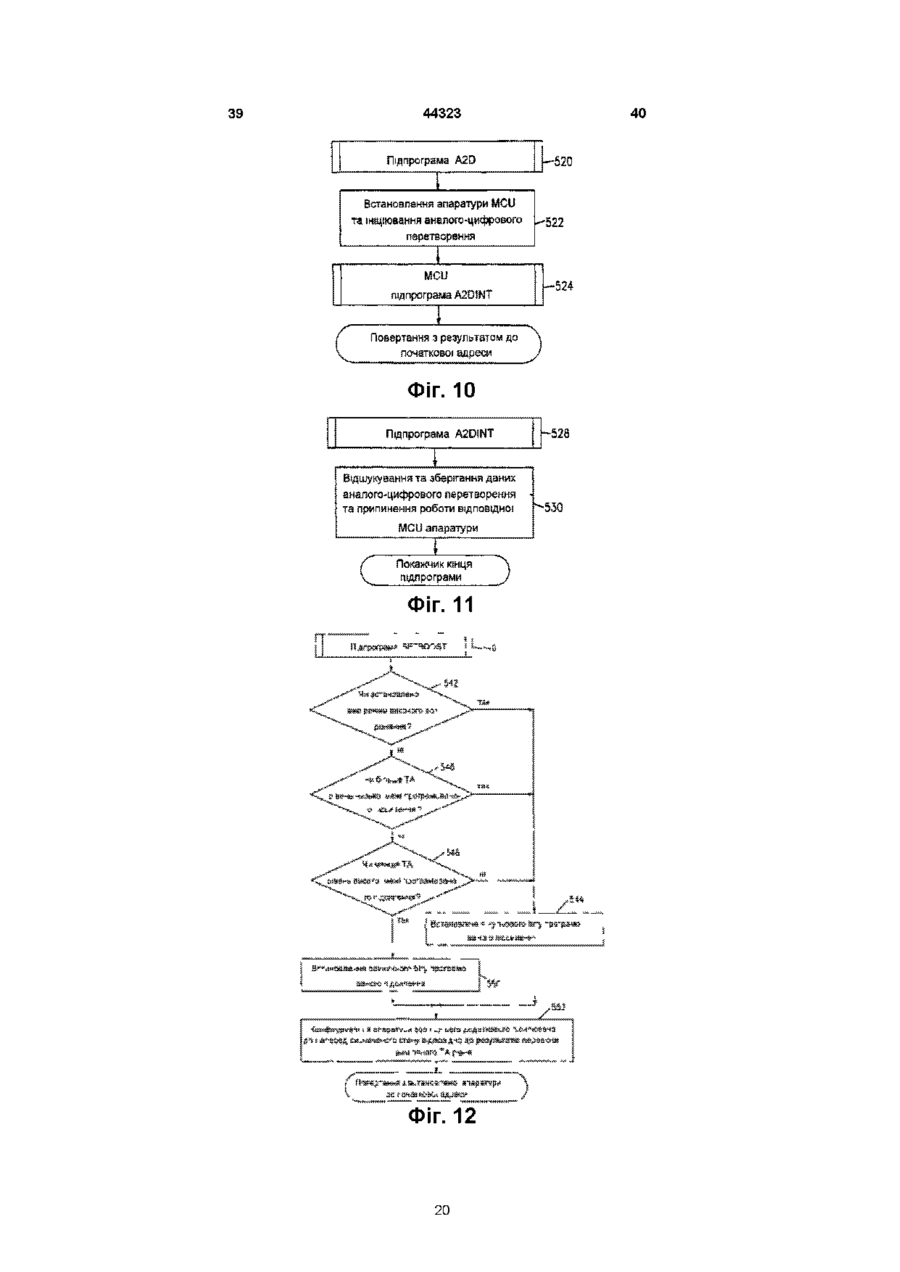
1 Пристрій для індикації змін в опорі живого тіла, який містить схему вимірювання відносно низьких змінних опорів в першому діапазоні та відносно високих змінних опорів в другому діапазоні для отримання виміряного сигналу, причому згадана схема вимірювання має ЗОВНІШНІ ВИВОДИ, схему підсилення виміряного сигналу до сприймального рівня, підключену до схеми вимірювання опору, індикаторну схему виміряного сигналу в сприймальному вигляді, підключену до схеми підсилення, який відрізняється тим, що містить схемний засіб регулювання чутливості, підключений до схеми підсилення, підключеної до індикаторної схеми для автоматичного підвищення чутливості індикаторної схеми для високого змінного опору в другому діапазоні, виміряного в схемі вимірювання опоРУ 2 Пристрій за п 1, який відрізняється тим, що схемний засіб регулювання чутливості виконано з можливістю автоматичного регулювання чутливості індикаторної схеми для низького змінного опору в першому діапазоні, виміряного в схемі вимірювання опору 3 Пристрій за п 1, який відрізняється тим, що згаданий схемний засіб регулювання чутливості включає в себе схему керування 4 Пристрій за п 1, який відрізняється тим, що згаданий схемний засіб регулювання чутливості включає в себе керований напругою операційний підсилювач 5 Пристрій для індикації змін в опорі живого тіла, який містить схему вимірювання опору, яка має ЗО ВНІШНІ виводи, схему підсилення, підключену до схеми вимірювання опору, індикаторну схему, підключену до схеми підсилення, схему регулювання чутливості, підключену до схеми підсилення, причому індикаторна схема виконана з можливістю автоматичного підвищення чутливості індикаторної схеми для встановлення високого змінного опору в схемі вимірювання опору, який відрізняється тим, що схема регулювання чутливості включає в себе спарений потенціометр 6 Пристрій для індикації змін в опорі живого тіла, який містить схему вимірювання опору, яка має ЗОВНІШНІ виводи та регульований вручну потенціометр, схему підсилення, підключену до схеми вимірювання опору, індикаторну схему, підключену до згаданої схеми підсилення, який відрізняється тим, що згадана схема підсилення включає в себе схему калібровки для автоматичного регулювання коефіцієнта підсилення згаданої схеми підсилення у ВІДПОВІДЬ на переміщення згаданого регульованого потенціометра 7 Пристрій за п 6, який відрізняється тим, що додатково включає в себе комп'ютерний інтерфейс для подачі модульованого виміряного сигналу 8 Пристрій за п 6, який відрізняється тим, що згадана схема підсилення включає в себе операційний підсилювач, який має конденсатор, підключений в схемі між позитивним та негативним входами в згаданий операційний підсилювач 9 Пристрій за п 6, який відрізняється тим, що включає в себе мікропроцесорний пристрій керування в згаданій схемі калібрування, програмне забезпечення для конфігурування згаданої схеми калібровки при неперервному виявленні змін в регульованому вручну потенціометрі і для визначення та встановлення режиму розділення на основі множини заданих режимів розділення 10 Пристрій за п 6, який відрізняється тим, що згадана схема калібровки містить схему зворотного зв'язку виміряного вхідного сигналу, підключену до схеми вимірювання опору, схему керування параметром компенсації, підключену до схеми зворотного зв'язку, та схему компенсації сталої амплггудної характеристики, підключену до схеми керування О со сч со 44323 11 Пристрій за п 10, який відрізняється тим, що згадана схема керування додатково включає в себе мікропроцесорний пристрій керування, підключений до згаданої схеми зворотного зв'язку, та аналого-цифровий перетворювач, підключений до згаданої схеми зворотного зв'язку 12 Пристрій за п 10, який відрізняється тим, що згадана схема керування додатково включає в себе схему активації згаданої схеми керування після переміщення згаданого регульованого вручну потенціометра 13 Пристрій за п 10, який відрізняється тим, що додатково включає в себе мікропроцесорний пристрій керування, який знаходиться в згаданій схемі керування та підключений до згаданої схеми зворотного зв'язку, і і програмне забезпечення, яке оперативно керує згаданим мікропроцесорним пристроєм керування 14 Пристрій за п 13, який відрізняється тим, що додатково включає в себе схему компенсації та цифровий потенціометр, підключений до згаданої схеми підсилення 15 Пристрій за п 6, який відрізняється тим, що згадана схема калібровки включає в себе схему зворотного зв'язку для прийому сигналів, які характеризують опір живого тіла 16 Пристрій за п 15, який відрізняється тим, що додатково включає в себе схему керування, підключену до схеми зворотного зв'язку для визначення по згаданому вхідному сигналу компенсаційного сигналу який відповідає ЗМІНІ коефіцієнта підсилення схеми підсилення 17 Пристрій за п 16, який відрізняється тим, що додатково включає в себе схему компенсації для прийому згаданого компенсаційного сигналу та для регулювання згаданої схеми підсилення для підтримання, в основному, сталої амплггудної характеристики 18 Пристрій для індикації змін в опорі живого тіла, який містить схему вимірювання опору, яка має виводи, що виходять з неї, схему підсилення, підключену до схеми вимірювання опору, яка має ЗОВНІШНІ ВИВОДИ, індикаторну схему, підключену до схеми підсилення, яка має ЗОВНІШНІ ВИВОДИ, множину вручну керованих пристроїв, які мають ЗОВНІШНІ ВИВОДИ, щонайменше, один вивід, який виходить з кожної із згаданих схем та з кожного із згаданих вручну керованих пристроїв, який з'єднує кожну із згаданих схем одну з одною та зі згаданими вручну керованими пристроями, який відрізняється тим, що містить щонайменше, одну котушку індуктивності, включену в склад схеми вимірювання опору та в склад схеми підсилення, за рахунок чого зменшується радюзавада, яка проходить через згадані схеми 19 Пристрій для індикації змін в опорі живого тіла, який містить схему вимірювання опору, схему підсилення, підключену до схеми вимірювання опору, індикаторну схему, підключену до схеми підсилення, який відрізняється тим, що містить корпус, який оточує схему вимірювання опору, схему підсилення та індикаторну схему, та ізолюючу радіочастоти фарбу, яка покриває корпус 20 Спосіб підтримання, в основному, сталої амплітудної характеристики для заданого виміряного вхідного сигналу в пристрої для вимірювання змін в опорі живого тіла, яким має схему вимірювання опору, схему підсилення та індикаторну схему, який відрізняється тим, що ініціалізують згадану схему вимірювання опору та згадану схему підсилення, під'єднують живе тіло до згаданої схеми вимірювання опору, встановлюють загальний опір живого тіла, та регулюють коефіцієнт підсилення згаданої схеми підсилення згідно із заданим відношенням, так що для виміряної зміни в опорі забезпечується, в основному, стала амплггудна характеристика 21 Спосіб за п 20, який відрізняється тим, що додатково здійснюють ручне регулювання потенціометра як частини встановлення загального опору і встановлення режиму розділення на один із множини заданих режимів розділення для встановлення загального опору живого тіла 22 Спосіб за п 21, який відрізняється тим, що додатково здійснюють регулювання коефіцієнта підсилення згаданої схеми підсилення шляхом узгодження сигналів заданого коефіцієнта компенсації із заданими значеннями змін опору, які відповідають змінам в загальному опорі живого тіла 44323 Цей винахід відноситься до вдосконаленого пристрою індикації вимірювання змін в опорі живого тіла З появою пристрою Хабарда для вимірювання та індикації змін в живому ТІЛІ з'явилась можливість розрізняння невеликих змін в опорі живого тіла шляхом здійснення електромеханічного вимірювання Цей пристрій звичайно містить схему вимірювання опору, схему підсилення та індикаторну схему Хоч цей пристрій і є адекватно прийнятним для досягнення поставленої мети виявлення змін в опорі живого тіла, він виявився нездатним точно відображувати виміряні зміни Під час спроби вирішення цієї проблеми були здійснені різні вдосконалення, які описано та проілюстровано в патентах США № 3290589 та № 4459995 Такі пристрої слугують для генерування сигналу, який відображує результати вимірювання малих змін в опорі живого тіла Після ЦЬОГО ВІН ПІДСИЛЮЄТЬСЯ З видачею сигналу, який є різним і придатним для відтворення на індикаторі, який сприймається людиною, такому як дисплей Єдиним недоліком цих пристроїв є те, що небажані характеристики в сигналі можуть маскувати або помилково відтворювати результати малих вимірів Ці небажані характеристики можуть бути викликані зовнішньою радіоперешкодою та/або внутрішніми нелінійностями в самому пристрої Таким чином існує потреба в пристрої, який може більш точно відтворювати зміни в опорі живого тіла Суть винаходу Загальною метою даного винаходу є точна індикація малих змін в опорі живого тіла Частковою метою даного винаходу є усування небажаних характеристик в сигналі, який відображує опір живого тіла Особливістю даного винаходує вмикання активної калібровки для забезпечення практично сталої амплггудної характеристики для даного виміряного вхідного сигналу Перевагою даного винаходу є те, що чутливість пристрою підтримується на сталому рівні У ВІДПОВІДНОСТІ до задач, особливостей та переваг даного винаходу розроблено вдосконалений вимірюючий електричний опір або індикаторний пристрій, який містить схему вимірювання опору, яка має ВХІДНІ ВИВОДИ, ЯКІ приєднуються до живого тіла для одержання сигналів вимірювання, які відображують опір живого тіла Схема підсилення приймає сигнали вимірювання та підсилює їх до розрізняльного рівня Індикаторна схема приймає підсилені сигнали та видає сигнали вимірювання в сприйнятній формі Даний винахід вигідно містить пасивні та активні пристрої, які слугують для усування небажаних характеристик в сигналі вимірювання Однією особливістю даного винаходу є активна схема калібровки Схема калібровки слугує для забезпечення практично сталої амплггудної характеристики для даного сигналу вимірювання зміни в опорі від схеми вимірювання опору В найкращому втіленні схеми калібровки частина схеми зворотного зв'язку та частина схеми управління сумісно контролюють роботу пристрою та передбачають зміни амплггудної характеристики в індикаторній схемі Також передбачено компенсатор, який слугує для пристосування або калібровки схеми підсилення для обліку передбачуваних змін амплітуди Інші задачі та переваги винаходу стануть очевидними із наступного його опису за кресленнями, на яких Короткий опис креслень Фіг 1 зображує функціональну блок-схему звичайного пристрою для вимірювання опору живого тіла, фіг 2 зображує функціональну блок-схему пропонованого пристрою, фіг 3 зображує функціональну блок-схему найкращої схеми вимірювання опору пропонованого пристрою, фіг 4А зображує функціональну блок-схему найкращої схеми підсилення пропонованого пристрою, фіг 4В зображує функціональну блок-схему 44323 8 схеми "Super YN" Така схема додатково викориссхеми зі змінним опором і схеми перемикання підтовує регулятор напруги 26 для встановлення стасилення, більних рівнів напруги постійного струму в усій фіг 4С зображує функціональну блок-схему електричній схемі Цифрова схема 28 під управлінсхеми зворотного зв'язку і управління, ням мікропроцесора/ці звичайні компоненти не пофіг 5А-5 зображують блок-схему ведучої проказано/ використовується для відстеження сигнаграми, лів, які забезпечуються на виводах 31 схеми виміфіг 6 зображує блок-схему програми затримрювання опору 20, підтримки дисплею, який відки, творює дату і час, та підтримки звичайних функцій фіг 7 зображує блок-схему програми вибору перемикання Виводи дисплею 32 забезпечують вимірюючого приладу, сигнали для звичайного годинника з табло на рідфіг 8 зображує блок-схему програми аналогоких кристалах та сигнал, який слідкує за дисплеяцифрового перетворення низького розрізняння, ми, розташованими в індикаторній схемі 24 Циффіг 9 зображує блок-схему програми аналогорова схема може бути типу, описаного в патенті цифрового перетворення високого розрізняння, США № 4702259 Інші виводи 33 виходять з схеми фіг 10 зображує блок-схему програми аналорегулятора напруги 26, схеми вимірювання опору го-цифрового перетворення, 20 та схеми підсилення ЗО і підключаються звичайфіг 11 зображує блок-схему програми перерино до різних звичайних ручних регуляторів /не повання аналого-цифрового перетворення, казані/ Ці ВИВОДИ можуть перехоплювати радіосигфіг 12 зображує блок-схему програми встанонали і викликати тим самим зовнішню перешкоду влення програмованого підсилення, В найкращому втіленні даного винаходу монтажна фіг 13 зображує блок-схему програми встаноплата містить котушки індуктивності 35, які відховлення режиму розрізняння, дять від виводів 37 ковзаючого контакту /повзуна/ фіг 14 зображує блок-схему програми знахоручних регуляторів Такі ручні регулятори можуть дження потенціалу низької напруги, містити перемикач функцій, низьковольтний потенфіг 15 зображує блок-схему програми вибору ціометр, низьковольтний потенціометр дистанційцифрового значення опору, ного управління, змінний резистор підстроювання фіг 16 зображує блок-схему програми зміни та регулятор чутливості цифрового значення опору Промислове застосування У ВІДПОВІДНОСТІ з даним винаходом схема підсилення ЗО звичайно містить два каскади підсиЗвертаючись до креслень, які наводяться для лення Перша схема підсилення 34 слугує для ілюстрації, даний винахід може бути використано в прийому та логарифмічного підсилення виміряного сполученні з будь-якими звичайними трикаскаднисигналу Друга схема підсилення 36, яку підключеми схемами для вимірювання та індикації змін опоно до виходу першої схеми підсилення 34, слугує ру живого тіла Звертаючись до фіг 1, такі придля задоволення потреб замовника та збільшення строї звичайно використовують схему вимірюванкоефіцієнту підсилення виміряного сигналу Комня опору 20 для перетворення виміряних опорів на п'ютерний інтерфейс 40 довільно забезпечує вхідживому ТІЛІ в сигнал вимірювання Схему вимірюний сигнал для схеми перетворювача напруга-ствання опору підключено до схеми підсилення 22, рум 38 для використань, де бажано мати імітоваяка підсилює виміряний сигнал до розрізняльного ний виміряний сигнал Схема перетворювача нарівня Індикаторна схема 24, підключена до схеми пруга-струм 38, яку підключено до виходу другої підсилення 22, видає виміряний сигнал у сприйнясхеми підсилення, модифікує виміряний сигнал, тному вигляді Схема вимірювання опору 20 може доводячи його до форми, прийнятної для індикатовиконувати такі вимірювання з використанням мосрної схеми 24 Схема перетворювача напруга-сттової схеми або схеми подільника напруги звичайрум 38 також забезпечує зворотний зв'язок до друно використовуваного типу для вимірювання опору гої схеми підсилення та комп'ютерного інтерфейсу живого тіла Трикаскадну схему, яка містить при40 До другої схеми підсилення 36 підключено схедатну для цієї мети мостову схему, описано в паму зі змінним опором 42, яка забезпечує сигнал тентах США № 4702259, № 4459995 та № зворотного зв'язку для підсилення виміряного сиг3290589, кожний з яких міститься в даному описі налу від схеми вимірювання опору 20 Схема зі як посилання Трикаскадна схема, яка містить призмінним опором 42 містить сегменти 46 та 44 висодатну для цієї мети схему подільника напруги, вхокого і низького програмованих підсилень Для ручдить у склад пристрою "Hubbard" Professional Mark ного регулювання підсилення до схеми зі змінним SUPER VIІ, виробником і продавцем якого є фірма опором 42 підключено ізольовану схему перемиHubbard Electrometer Manufacturing of Los Angeles, кання підсилення До схеми зі змінним опором 42 Ca також підключено схему калібровки 50 Схема каНа основі вищезгаданих відомих комбінацій лібровки 50 функціонує як калібровочний засіб для було зрозумілим, що схема потребує засобу для регулювання вихідного сигналу схеми підсилення автоматичного збільшення чутливості до високих В даному найкращому втіленні схема калібровки рівнів опору та автоматичного регулювання для 50 містить схему зворотного зв'язку 52, схему низьких рівнів опору Це вдосконалення забезпеуправління 54 та схему компенсації 55 чує сталу амплітудну характеристику індикаторної схеми 24 Схема вимірювання опору найкращого втілення винаходу /фіг 3/ є схемою типу подільника наНайкращий спосіб здійснення винаходу пруги В схемі подільника напруги високовольтний Найкраще втілення винаходу, проілюстроване вивід 56 послідовно з'єднано з першим резистоу вигляді функціональної блок-схеми на фіг 2, місром 58, який поділяє напругу В першому опорі мотить патентноздатні ознаки всередині звичайної 44323 10 же бути використано змінний резистор 60 для підопору Перша схема підсилення 34 містить строювання або зсуву величини першого опору операційний підсилювач (op-amp) 124, який має Звичайний перемикач перевірки вимірювального позитивний вхід 126, який підключено до вихідного приладу 62, який вибирається вручну або під виводу 88 сигналу від схеми вимірювання опору управлінням цифрової схеми 28, довільно переми20 /фіг 1/ Операційний підсилювач 124 конфігурукає ланцюг схеми подільника напруги між парою, ється у вигляді повторювача напруги з виводом яка складається з зовнішнього виводу 66 та вивозворотного зв'язку 128, що йде від вихідного ду 64 для під'єднання до живого тіла, та резистовиводу 13О операційного підсилювача до ром 68 на 5кОм, який працює як контрольний опір негативного входу 132 Між позитивним та замість живого тіла Звичайні електроди, які принегативним входами 126 та 132 підключено кондезначено для під'єднання до живого тіла, прикріпнсатор 134 для послаблення зовнішньої раділюються через вилку електричного з'єднувача /не оперешкоди у виміряному сигналі Вихідний вивід показано/ Під час фізичної вставки вилки ЗОВНІШНІ операційного підсилювача 130 паралельно з ланцвиводи 64 та 66 призначені для під'єднанння до югом зворотного зв'язку 136 забезпечує негативниживого тіла Коли вилку видалено, другий перемий вхід для операційного підсилювача 138, який кач 70 під'єднує вивід з високим потенціалом 66 до функціонує як підсилювач першого каскаду Послірезистора 68 на 5кОм Окрім того, між ЗОВНІШНІМИ довно до вихідного виводу 130 повторювача напвиводами 64 та 66 послідовно з котушкою індуктируги підключено резистор 140 Резистор 140 вності 86 підключено конденсатор 72 Котушка інпідключено до попередньо встановленого потенцідуктивності 86 та конденсатор 72 слугують для ометра 142 та вихідного виводу 144 підсилювача зменшення перешкод Між перемикачем перевірки першого каскаду через дві паралельні резистивні вимірювального приладу та вихідним виводом 88 гілки Перша гілка містить резистор 146, який підкформується другий опір, який поділяє напругу лючено між потенціометром 142 та першим резиТретій опір 74, який поділяє напругу, підключено стором 140 Друга гілка містить звичайний рпослідовно між вихідним виводом 88 та низьковоегульований користувачем потенціометр, який льтним виводом 76 підключено на електродах 148, послідовно з'єднаних з резистором 150 та попередньо встаноВеличина низьковольтного потенціалу в виводі влюваним змінним резистором 142 Регульований 76 може регулюватись вручну з використанням рукористувачем потенціометр /не показано/ функціочного регулятора 78 В найкращому варіанті ручнує як потенціометричний регулятор чутливості ний регулятор 78 містить вивід ковзаючого контакЕлектроди регулятора чутливості 148 містять виту 80 від потенціометру 82, який підключено між від ковзаючого контакту 152, який підключено до високовольтним та низьковольтним виводами Ланегативного вхідного виводу 154 підсилювача пернцюг виводу ковзаючого контакту 80 містить котушого каскаду через котушку індуктивності 156 На шку індуктивності 87, яка звичайно підключається позитивний вхідний вивід 158 операційного підспослідовно через аналогову схему перемикання 90 илювача першого каскаду надходить опорний сидо виводу 91 та заземленого конденсатора 92 для гнал 160 від регулятора напруги 26, який забезмінімізації перешкод Ручний регулятор може бути печує стабільний опорний сигнал 5,25В Вивід для звичайно вбудованим потенціометром 82 або ЗОВопорного сигналу 160 також з'єднано з резистНІШНІМ потенціометром 94 ЗОВНІШНІЙ потенціометр ивною гілкою зворотного зв'язку, яка містить друг94 також підключає паралельно високовольтний та ий попередньо встановлюваний змінний резистор низьковольтний виводи 96 і 98та вивід ковзаючого 162 та постійний резистор 164, з'єднаний з вихконтакту 100 до аналогової схеми перемикання ідним виводом 166 першої схеми підсилення ВихіЗОВНІШНІЙ ЗМІННИЙ резистор 94 також містить відд 144 підсилювача першого каскаду також з'єдалений вивід сигналу 102 та земляний вивід 104 днано з вихідним виводом 166 через постійний Аналогову схему перемикання 90, яка може звирезистор 170 Фахівці в даній галузі техніки /можутчайно містити ручний перемикач або подільник наь оцінити, що конфігурація цієї схеми підсилення пруги та тригери-защіпки, підключено до аналогопершого каскаду забезпечує ослаблений сумуючивого перемикача /не показано/, який селективно й підсилювач, який сумує величину сигналу на приводить в дію внутрішній або ЗОВНІШНІЙ потенцівихідному виводі 88 від схеми вимірювання опору ометр В другому випадку вибір потенціометру 20, підсиленого за рахунок коефіцієнту підсилення здійснюється ВІДПОВІДНО до рівня напруги на вивоопераційного підсилювача 138, та величину нді сигналу 102 Сигнал підтримується "високим" апруги опорного сигналу 160 Операційні підсипри використанні внутрішнього потенціометра 82 і лювачі 124 та 138 схеми підсилення першого поєднується до землі 104 виводом 106 у зовнішнькаскаду є підсилювачами типу моделі ОР420, які ому потенціометрі Величини напруги від ковзаючвиробляються американською фірмою Analog Devого контакту 91, висока та низька величини напруг ices Іпс Вихідний ВИВІД 166 цього сумарного підсивід використовуваного потенціометра надсилаленого сигналу підключається до схеми підються до цифрової схеми 28 /фіг 2/ для обчисленсилення другого каскаду 36 Перша схема підсилня значень сигналу цифрового потенціометра Сиення також змінює коефіцієнт підсилення приладу гнал з вихідного виводу ковзаючого контакту 91 з 1 до 10 логарифмічне під час зміни змінного надсилається через буферну схему 112, яка місрезистора 142 з низької величини опору на високу тить повторювач напруги, для запобігання втрати В схемі підсилення другого каскаду 36 струму в низьковольтному виводі 76 операційний підсилювач 172 типу моделі ОР90, який виробляється фірмою Analog Devices, Inc , Посилаючись на фіг 4А, 4В та 4С, перша схвключається з гілкою зворотного зв'язку зі змінним ема підсилення 34 приймає виміряний сигнал, забезпечений вихідним виводом схеми вимірювання 11 44323 12 опором Цей окремий тип підсилювача вимагає кобуде описано далі Схему зі змінним опором 42 рекції зсуву з використанням змінного резистора підключено через виводи 226 та 228 /фіг 4А та 179, з'єднаного з землею 176 через ковзаючий фіг 4В/ між негативним вхідним виводом 182 опеконтакт 178 Для інших типів придатних для цієї раційного підсилювача 172 та через вентиль тримети підсилювачів такий ланцюг може не бути негер-защіпки 187 до перетворювача напруга-струм обхідним Вихідний ВИВІД 166 схеми підсилення п38 та джерела опорної напруги 201 через резистор ершого каскаду 34 підключено до позитивного вх202 Конденсатор 223, який підключено між позиідного виводу 180 операційного підсилювача друтивним та негативним вхідними виводами 180 та гого каскаду 172 Ланцюг 42 зі змінним опором 182, забезпечує подальше ослаблення ЗОВНІШНІХ забезпечує зворотний зв'язок по підсиленню до радіочастотних перешкод Схема програмованого негативного вхідного виводу 182 другого підсилювисокого підсилення 46 містить чотири сегменти вача 172 Вихідний ВИВІД 184 другого підсилювача схеми, які підключено паралельно між двома виво172 підключено до одного логічного елементу 186 дами 226 і 228 схеми зі змінним опором з множини вентилів тригер-защіпок 186-187 Ці веПерший сегмент містить конденсатор 230 Друнтилі тригер-защіпок вибірково підключають перегий сегмент містить вентиль тригер-защіпки 232 та творювач напруга-струм 38 до схеми підсилення резистор 24, третій сегмент містить вентиль тридругого каскаду 36 та комп'ютерного інтерфейсу гер-защіпки 236 та резистор 238 Четвертий сег40 Перемикання виконується за допомогою цифмент містить три послідовно з'єднані резистори рової схеми 28 у ВІДПОВІДЬ на вибір оператора зви240-242 Два вентилі тригер-защіпок 232 і 236 чайним способом управляються Ізольованими перемикаючими схемами підсилення 48 Схема програмованого низьКомп'ютерний інтерфейс 40 підключено через кого підсилення 44 містить окремий вентиль тривентилі тригер-защіпок 188 та 189 до перетворюгер-защіпки 244, який підключено до схеми калібвача напруга-струм 38 Комп'ютерний інтерфейс ровки 50 і який містить три паралельно з'єднані гі40 містить підсилювач 190, аналогічний до схеми лки, - детальний и опис наводиться далі Кожна гілдругого каскаду з виводом сигналу E-JN 192, який ка містить окремий вентиль тригер-защіпок 246, проходить від шини сигналу і з'єднується з позити248 та 250, який послідовно з'єднано з ВІДПОВІДНИМ вним вхідним виводом 194 підсилювача Перший резистором 252, 253 та 254 І який вибірково підконденсатор 196 забезпечує фільтрований зворотключається до схеми в залежності від встановленний зв'язок і його підключено між негативним вхідня схеми перемикання підсилення 48 ним виводом та виходом підсилювача 190 Окрім того, негативний вхідний вивід підключено до схеСхема перемикання підсилення 48 містить пеми зворотного зв'язку з подільником напруги, яка ремикач 256 з ковзаючим контактом 258, який має містить вивід 201 для опорного сигналу, два підвиздатність встановлюватись в три окремі положенщуючих резистори 202 та 203, вентиль тригер-заня низьке 260, нормальне 262, високе 264 Всі вищіпки 188 та третій резистор 204, який з'єднано з води 260, 262 та 264 з'єднано з землею через зниземлею жуючі резистори 268, 267 та 266 ВІДПОВІДНО Вентилі, до яких підключено кожний з цих ВІДПОВІДНИХ E-JN вивід 192 комп'ютерного інтерфейсу прививодів, замикаються під час детектування напруймає сигнал відтворення або емульований сигнал ги землі Ковзаючий контакт 258 перемикача 256 відтворення раніше записаного сеансу зв'язку та має позитивний або високовольтний рівень Коли дублює вихід на індикаторній схемі з використанковзаючий контакт з'єднується з високим 264, норням підсилювача 190 комп'ютерного інтерфейсу мальним 262 або низьким виводом 260 схеми, Сигнальний вивід E-OUT 206 приймає сигнали, які з'єднаний вивід набуває високовольтного рівня Веіндикують зміни в опорі живого тіла, від індикаторнтиль тригер-защіпки, який приєднано до ВІДПОВІДної схеми 24 та передає виміряні сигнали на комНОГО виводу, буде розмикати тригерну схему після п'ютерний інтерфейс 40 виявлення високої напруги Схему програмованого Схема перетворювача напруга-струм 38 місвисокого підсилення завжди ввімкнуто, навіть в ретить транзистор 208 з емітерним виводом 210, жимі програмованого низького підсилення Вхідний який з'єднано з виводом напруги "високого" рівня сигнал від підсилювача першого каскаду далі під201 через резистор зсуву 202 та вентилі тригерівсилюється ВІДПОВІДНО до встановленого низького, защіпок 187 та 188 Базовий вивід 212 підключено нормального чи високого положень перемикача до виводу "високої" напруги через резистор 214 і підсилення, який змінює коефіцієнт підсилення два послідовно з'єднаних діоди 216 - 217, обернеопераційного підсилювача ЛІНІЙНО В 10 разів Опено зміщених відносно базового виводу 212 Діоди раційний підсилювач другого каскаду забезпечує 216-217 підключено через вентилі тригер-защіпок додаткове підсилення шляхом перемикання підси186 та 189 до виходу підсилювача другого каскаду лення таким чином, що коефіцієнт підсилення по172 та вихідного виводу підсилювача комп'ютерномножується на 1 в нижньому положенні перемикаго Інтерфейсу ВІДПОВІДНО Колекторний вивід транча, на 10 - в нормальному положенні перемикача і зистора створює вихідний вивід 221, який підклюна 100 - в високому положенні перемикача Окрім чається до індикаторної схеми 24 цього, операційний підсилювач другого каскаду заСхема зі змінним опором 42 /фіг 4В/ містить безпечує коефіцієнт підсилення, який знаходиться схему програмованого низького підсилення 44 та в межах від 0,7х до 50х і який повністю управлясхему програмованого високого підсилення 46 ється мікропроцесорним пристроєм управління Зміни В потенціалі низьковольтного виводу 76 від Оскільки коефіцієнт підсилення, який управляєтьсхеми вимірювання опору/фіг 3/ здійснюють вибір ся мікропроцесорним пристроєм, є незалежним від використання однієї із схем зі змінним опором для чутливості перемикача підсилення, він може роззабезпечення змінного коефіцієнту підсилення, як 13 44323 глядатись як коефіцієнт підсилення третього каскаду Кожний з цих трьох каскадів веде до загального коефіцієнту підсилення схеми таким чином, що вихідний коефіцієнт підсилення є добутком коефіцієнтів підсилення трьох каскадів Самий низький можливий коефіцієнт підсилення дорівнює 1,0 х 1,0 х 0,7 = 0,7, і самий високий можливий коефіцієнт підсилення дорівнює 10 х 100 х 50 = 50000 Схема управління і зворотного зв'язку 50 /фіг 4С/ забезпечує активну калібровку підсилювача у ВІДПОВІДЬ на зміни або рух в ручному регуляторі 78 схеми вимірювання опору 20 Схема управління і зворотного зв'язку 50 підключається до схеми зі змінним опором в негативному вхідному виводі 182 операційного підсилювача, що ілюструється виводом 56 /фіг 4СД який послідовно з'єднано з виводом 226 /фіг 4В/ і негативним вхідним виводом 182 операційного підсилювача 172, та схема управління і зворотного зв'язку 50 підключається в управляючому виводі 272 /фіг 4В та 4С/ вентиля тригер-защіпки 244 низького/високого рівня з програмованим підсиленням Схема 50 може використовуватись для забезпечення активної калібровки у ВІДПОВІДЬ на будь-які зміни в схемі, які можуть викликати небажану характеристику у виміряному сигналі В наведеному тут найкращому втіленні схема управління і зворотного зв'язку контролює та реагує на зміни в ручному регуляторі 78 Звертаючись до фіг 3 та схеми вимірювання опору, можна побачити, що ручний регулятор 78 управляє потенціалом низьковольтного виводу 76 подільника напруги Фахівці в даній галузі техніки можуть оцінити, що зміни низьковольтного потенціалу обернено-пропорційно змінюють падіння напруги на подільнику напруги Під час змін напруги на подільнику напруги робочий діапазон, який визначає максимальні значення виміряного сигналу в виводі 88, також змінюється обернено-пропорційно значенню напруги на низьковольтному виводі 76 Ця зміна в робочому діапазоні впливає на індикаторний діапазон, який визначає максимальні величини, які забезпечуються на індикаторній схемі 24 Для підтримання індикаторного діапазону на каліброваному сталому рівні в індикаторній схемі 24 схема управління і зворотного зв'язку регулює коефіцієнт підсилення зворотного зв'язку схеми підсилення другого каскаду для компенсації змін в робочому діапазоні виміряного сигналу 88 Окрім того, необхідно оцінити те, що коли низьковольтний потенціал на виводі 76 регулюється для близького узгодження з верхнім рівнем напруги 56, діапазон напруг, в яких може бути виміряно різницю в опорі, є дуже малим Для таких малих діапазонів необхідна схема програмованого високого підсилення По всьому діапазону значень низьковольтного потенціалу схема управління та зворотного зв'язку регулює вихідний сигнал операційного підсилювача шляхом регулювання коефіцієнту підсилення на негативному вхідному виводі операційного підсилювача Для здійснення регулювання коефіцієнту підсилення на негативному вхідному виводі операційного підсилювача і перемикання між режимом програмованого високого підсилення та режимом програмованого низького підсилення схема управління та зворотного зв'язку містить схему зворотного зв'язку 52, схему управління 54 та схему ком 14 пенсацм 55 Схема зворотного зв'язку 52 схеми управління та зворотного зв'язку містить вивід, який приєднано до виводу низьковольтного потенціалу 76, який приєднано через резистор 306 до вхідного виводу 308 низького розрізняння мікропроцесорного пристрою управління, і містить заземлений конденсатор 310 для фільтрації сигналу Вихід резистора 306 також підключено до позитивного вхідного виводу 312 операційного підсилювача 314 Негативний вивід 316 операційного підсилювача з'єднано з ланцюгом підсилення, який містить резистивну гілку зворотного зв'язку 318, яку послідовно з'єднано з потенціометром 324, та ємностну гілку 320, яку підключено паралельно між негативним вхідним виводом 316 та вихідним виводом 322 Потенціометр 324 балансується за допомогою пари постійних резисторів 326 і 328 та змінного резистора 330 для здійснення бажаного зсуву підсилення До виходу операційного підсилювача високого розрізняння 314 через резистор 331 підключено вхідний вивід високого розрізняння 332 Схема управління 54 містить мікропроцесорний пристрій управління /MCU/ 334 типу моделі ST62T10B6/SWD, який виробляється американською фірмою SGS Thompson Electronics of Carrolton, Texas В цьому окремому випадку мікропроцесорний пристрій управління 334, який також звичайно називають центральним процесором /CPU/, містить перший восьмибгговий порт, який конфігурується за допомогою програмного забезпечення для прийому двох вихідних сигналів 308 та 332 схеми зворотного зв'язку через контактні штирки 14 та 15 ВІДПОВІДНО ЦІ штирки підключаються в схему до внутрішнього аналого-цифрового перетворювача, який входить в склад мікропроцесорного пристрою управління і який масштабовано для розрізняння дискретних змін вхідного сигналу в діапазоні від 0 до 255 кроків нарощування Вхід низького розрізняння змінюється безперервно під час панорамування ручного регулятора 78 в діапазоні 0,5 - 6,5, що відповідає діапазону змін напруги в межах приблизно 1,4 - 5,2В Вхід високого розрізняння є активним, але напруга фактично не змінюється доти, доки ручний регулятор 78 не встановлено на величину більше приблизно 4,8В Нижче цього рівня вхід високого розрізняння залишається на величині приблизно 0,7В /один приріст падіння напруги вище землі/ Діапазон входу високого розрізняння калібрується для досягнення величини 1В після досягнення ручним регулятором 78 величини 5,0В, і напруга продовжує збільшуватись ЛІНІЙНО до приблизно 5,2В при підвищенні величини ручного регулятора 78 до 6,5В Схема управління 54 /фіг 4С/ також містить тригерну схему активації 336 Схема 54 необхідна тільки на протязі проміжку часу, коли ручний регулятор 78 знаходиться в переході Оскільки ця активність є уриваною, схема 54 включає енергозберігаючий тригер 338 в режимі очікування Тригер 338 є тригером з роздільною установкою 1 та 0 типу моделі 401ЗВ, який виробляється фірмою Motorola Вивід 340 від цифрової схеми 28 /фіг 2/ запускає вентиль тригера-защіпки, який звичайно встановлено на "високу" напругу 341 Коли цифрова схема 28 виявляє зміни в низьковольтному вихі 15 44323 дному виводі 91 ковзаючого контакту /фіг 3/, це викликає зміну сигналу з "високого" на "низький", що передається в виводі 340 до індикаторної схеми 24 Цей вивід 340 також підключено до схеми активації 336 Коли рівень сигналу на виводі 340 знижується до потенціалу землі або "низького", тригер 338 змінює вихідний сигнал 342 і надсилає сигнал переривання до мікропроцесорного пристрою управління, який в ДІЙСНОСТІ "будить" цей пристрій Схема управління 54 містить виводи джерела живлення та землі 344 і 346, які підключено в контактних штирках 1, 2, 5, 6 і 20 звичайним чином До штирка 7 мікропроцесорного пристрою управління підключено схему ліквідації переривання 348 цього пристрою Перемикач повертання хроновано для того, щоб викликати появу на штирку 7 сигналу відновлення за умови різкого зниження напруги джерела живлення Повертання з вмиканням/відключенням передбачається здійснювати під час проходження значення напруги 4,5В При підвищенні напруги від нуля і наближенні її до 4,5В повертання залишається вимкненим При підвищенні напруги вище 4,5В вмикається повертання і залишається ввімкненим доти, доки рівень напруги дорівнює 4,5В або приблизно 4,5В Повертання вимикається якщо рівень напруги падає нижче 4,5В і залишається вимкненим доти, доки рівень напруги залишається нижче 4,5В Годинник 350, який працює на частоті 4МГц, підключається до штирків 3 і 4 та є годинником типу моделі РХ400, який виробляється під торговою маркою Panasonic Схема управління 54 у ВІДПОВІДЬ на схему зворотного зв'язку 52 і під управлінням програмного забезпечення працює для генерування калібровочного сигналу Калібровочний сигнал надсилається через вивід 356та штирки 18 і 19 мікропроцесорного пристрою управління до схеми компенсації 55 Схема компенсації 55 найкращого втілення винаходу містить змінний резистор 354 з цифровим управлінням або цифровий потенціометр /DP/ Цифровий потенціометр 354 типу моделі Х9С103, який виробляється фірмою Xicor of Milpitas, California Цифровий потенціометр 354 приймає на вході опорну напругу ТА Ref 160, яка є вхідним сигналом Вихідний ВИВІД 357 схеми зі змінним опором, сигнал з якого фільтрується для видалення зовнішньої радіоперешкоди за допомогою заземленого конденсатора 358, підключено до негативного входу 182 другого операційного підсилювача через вивід 226, фіг 4А Цей вивід також проілюстровано як вивід R+ на фіг 4В і 4С Опір цифрового потенціометра 354 змінюється у ВІДПОВІДЬ на калібровочний сигнал від мікропроцесорного пристрою управління 334 Зміни змінного опору слугують для протидії впливу передбачуваних лі небажаних характеристик у виміряному сигна Посилаючись на фіг 4А, 4В і 4С, мікропроцесорний пристрій управління 334 взаємодіє зі схемою зворотного зв'язку 52 та схемою управління 54 під контролем профамного забезпечення, яке конфігурує звичайний мікропроцесорний пристрій управління 334 для активного контролю схеми для здійснення функції калібровки Програмне забез 16 печення містить ведучу програму та одинадцять підпрограм Скорочені позначення ТА в блок-схемах програм відповідають ручному регулятору 78 Найкраще втілення кожної програми описано далі Ведуча програма 400 /фіг 5А - 5В/ містить ІНІціюючу програму, яка містить кроки встановлення векторів переривання адреси 401 і конфігурування апаратних засобів мікропроцесорного пристрою управління та портів 402 Потім виконується цикл затримки для забезпечення можливості штиркамвиводам мікропроцесорного пристрою управління стабілізуватись на своїх завчасно визначених рівнях Цей цикл включає ініціацію кроку лічильника 403 і циклу "доки ні" 404, який запитує підпрограму затримки 406 на два цикли В наступному кроці 408 встановлюється цифровий потенціометр або цифровий змінний резистор Діапазон цифрового потенціометра масштабується на 100 кроків приросту, і визначаються позитивна та негативна межі Потім виконується програма конфігурування цифрового потенціометра/Clkdp/410 для встановлення початкового значення для цифрового резистора Наступною виконується підпрограма 412 вибору типу вимірювального приладу/selmeter/ Після завершення підпрограми 412 програма ініціалізації завершується, і починається режим активної калібровки Режим активної калібровки є основною підпрограмою, яка виконується мікропроцесорним пристроєм управління 334 /фіг 4С/ і повторюється безперервно на протязі часу перебування цього пристрою в активному стані Спочатку конфігурується тригер в режимі очікування для виявлення зміни рівня ТА в кроці виявлення ввімкненого ТА 414 Потім запитується підпрограма вимірювання ТА потенціометра в режимі низького рівня розрізняння /a 2d low/ 416 Підпрограма встановлення підсилення /setboost/ 418 визначає та конфігурує ЛОГІЧНІ елементи для високого або низького програмованого коефіцієнту підсилення Потім підпрограма встановлення режиму /setmode/ 420 внутрішньо визначає та встановлює режим розрізняння на "високе" або "низьке" розрізняння Потім режим розрізняння перевіряється в кроці перевірки розрізняння 422 Якщо флаговий біт розрізняння є високим, запитується вимірювання ТА в підпрограмі високого розрізняння /a2d high/ 424 Або, в протилежному випадку, вимірювання не виконується В наступному кроці підпрограма виявлення ТА /ТА find/ 426 визначає величину ТА Потім, у ВІДПОВІДНОСТІ до показаної на фіг 5С-1 підпрограми встановлення цифрового потенціометра /dpset/ 428, визначається КІЛЬКІСТЬ необхідної калібровки Потім запитується програма clkdp 430 для переконфігурування цифрового потенціометра до бажаного нового калібровочного положення Після калібровки системи компенсації, перевірки змін ТА рівня виконується крок 432 Якщо трапляється зміна в ТА змінному резисторі, в кроці 434 здійснюється очистка тригера в режимі очікування, і ведуча програма повертається до кроку 414 виявлення ввімкненого ТА В протилежному випадку, ведуча програма продовжується з кроку переконфігурування тригера 436 для забезпечення відповідної конфігурації тригера Потім, посилаючись на фіг 5С-1, регістр лічи 17 44323 18 льника в кроці 438 конфігурується для здійснення 468 Таким чином, ведуча програма підтримує кациклу з трьох виборок Як показано на фіг 5С-2, лібровку схеми підсилення якщо в кроці 440 під час перевірки на високе розріБуло виявлено корисність режиму очікування, зняння воно виявляється, в кроці підпрограми виоскільки в протилежному випадку мікропроцесорсокого розрізняння 442 запитується вимірювання ний пристрій управління 334 здійснював би безпеТА В протилежному випадку запитується в кроці рервну калібровку схеми підсилення Це призвело підпрограми 444 вимірювання ТА при низькому б до періодичних стрибків в вихідному сигналі інрозрізнянні В наступному кроці 446 виміряна вибідикаторної схеми, які були б не зв'язані зі схемою рка запам'ятовується в пристрої запам'ятовування вимірювання опору Режим очікування усунув виДекрементний лічильник виборок і перевірка для падкові стрибки і стабілізував схему компенсації кінця кроку виборки 448 повертається до кроку пешляхом введення в бездіяльний стан схеми управревірки розрізняння, якщо існує менше трьох вибоління на протязі стабільних періодів рок В протилежному випадку програма ІНІЦІЮЄ пеЯк обговорювалось вище у відношенні ведучої ревірку вибіркових даних Метою перевірки є випрограми, підпрограми вирішують специфічні зазначення завершення оператором регулювання дачі в рамках ведучої програми Ці підпрограми буручного регулятора до нового положення Мікроде описано в порядку, в якому вони записані в вепроцесорний пристрій управління розпізнає, що дучій програмі оператор закінчив поворот регулятора, і вимірюПідпрограма 480 затримки /dly 1/ містить крок вання тепер є стабільним, коли будь-які дві з трьох сталого навантаження лічильника 482 для формувиборок даних є рівними В той час, як можуть вивання циклу, крок негативного приросту лічильниконуватись ІНШІ кроки і ІНШІ вибірки даних для вика 484 і крок перевірки закінчення циклу 486 При значення завершення оператором регулювання завершенні циклу для необхідного числа циклів ручного регулятора, найкраще втілення містить підпрограма повертається до програми, яка її затри кроки стану даних 450 /фіг 5С-2/, 452 /фіг 5Dпитувала 1/ та 454 /фіг 5D-1/ В першому перевірочному Підпрограма вибору вимірювального приладу кроці 450 перша вибірка даних порівнюється з дру/selmeter/ 490 запитується в ініціалізуючій частині гою вибіркою даних Якщо перша та друга вибірки ведучої програми Дана схема зворотного зв'язку і даних є рівними, перевірка припиняється і програуправління пропонованого пристрою може реаліма продовжується до кроку перевірки ТА статусу зовуватись на будь-яких існуючих електровимірю456 /фіг 5D-1/ В протилежному випадку перевірка вальних приладах, які використовують подільник продовжується з другого кроку перевірки 452, в напруги або міст опору типів, описаних раніше і якому порівнюється перша вибірка даних з тревключених в опис для посилання Схема і програтьою вибіркою даних При рівності першої і третьої мне забезпечення даного винаходу можуть конфівиборок даних перевірка припиняється, і програма гуруватись для роботи зі схемою подільника напродовжується до кроку перевірки ТА статусу 456 пруги, як проілюстровано в найкращому втіленні, Або ж перевірка продовжується з допомогою треабо схемою з мостом опору Підпрограма вибору тього кроку перевірки 454, в якому порівнюються вимірювального приладу перевіряє контактний друга і третя вибірки даних При рівності другої та штирок порту в мікропроцесорному пристрої третьої виборок даних програма продовжується до управління Цей штирок витягується до "високої" кроку перевірки статусу ТА 456 В протилежному або "низької" напруги в залежності від типу викоривипадку ТА ще регулюється, і програма повертастовуваної схеми вимірювання опору Підпрограма ється до початку програми калібровки в кроці вивибору вимірювального приладу 490 містить крок явлення ввімкненого ТА 414 /фіг 5В/ перевірки штирка 492 Якщо штирок "внесши", виконується крок ініціалізації 494 для схеми подільЯкщо будь-які з виборок даних є рівними, що ника напруги В протилежному випадку виконуєтьвказує на те, що ручне регулювання закінчено та ся крок Ініціалізації 496 для схеми моста опору Пііснують вірогідні дані, виконується крок перевірки сля завершення будь-якого кроку ініціалізації простатусу ТА тригера Якщо тригер було запущено, грама повертається до ведучої програми він очищується і виконується повертання до кроку 458 /фіг 5D-1/, і програма повертається до кроку a2dlow підпрофама 5GG вимірює ТА рівень в виявлення ввімкненого ТА Або ж схема компенсарежимі низького розрізняння Підпрограма містить ції калібрується знову в перерахованій ПОСЛІДОВНОкрок ініціалізації 502 для встановлення внутрішСТІ a 2d low підпрограма 416 /фіг 5В/, setboost піднього аналого-цифрового перетворювача /АЦП/ програма 460 /фіг 5D-1/, tafmd підпрограма 462 мікропроцесорного пристрою управління на режим /фіг 5D-1/, dpset підпрограма 464 /фіг 5D-2/ та низького розрізняння Потім запитується підпрофаclkdp підпрограма 466 /фіг 5D-2/ Потім знову пема аналого-цифрового перетворювача /АЦП/ /a2d/ ревіряється ТА тригер на рух в кроці 468 /фіг 5D504 При повертанні, в кроці 506 АЦП очищується, 2/ Якщо рух мав місце, ТА тригер очищується 470, і підпрограма повертається до програми, яка її заі програма повертається до кроку виявлення ввімкпитувала неного ТА 414 В протилежному випадку програма a2dhigh підпрограма 510 вимірює ТА рівень в входить в режим очікування в кроці 472 для зберережимі високого розрізняння Підпрограма містить ження енергії та запобігання шуму Активна частикрок ініціалізації 512 для встановлення внутрішна апаратних засобів мікропроцесорного пристрою нього АЦП мікропроцесорного пристрою управлінуправління контролює вхідний сигнал від ТА тригеня на режим високого розрізняння Потім запитура Якщо приймається сигнал переривання, мікроється a2d підпрофама 514 При повертанні, в кроці процесорний пристрій управління будиться в кроці 516 АЦП очищується, і підпрофама повертається 474 і повертається до перевірки для кроку руху ТА до профами, яка її запитувала 20 19 44323 Використання режимів високого та низького яка її запитувала розрізняння дає можливість восьми-бітовому АЦП, В наведеному тут найкращому втіленні граничпо суті, працювати як дванадцяти-бітовий АЦП, не значення низького програмованого підсилення який є необхідним для всього діапазону напруги 0 менше граничного значення високого програмова- 5,2В, в якому низьке розрізняння знаходиться в ного підсилення Фахівці в даній галузі техніки модіапазоні 1 - 4,8В, а високе розрізняння знаходитьжуть оцінити, що описана блок-схема програми не ся в діапазоні 4,8 - 5,2В В режимі низького розрізповинна була б вимагати в таких випадках порівняння АЦП сприймає напругу ковзаючого контакту няння з високим значенням програмованого підсиТА безпосередньо, таким чином, що діапазон налення, оскільки ТА рівень для цієї перевірки був би пруги 1,4 - 5,2В відповідає десятковим числам призавжди меншим високої межі програмованого підблизно від 67 до 255 В режимі високого розрізнянсилення Однак, в альтернативному втіленні висоня АЦП бачить вхідний діапазон 1,0 - 5,2В, який ка межа програмованого підсилення менша низьвідповідає приблизно діапазону 4,8 - 5,2 В на ковкої межі програмованого підсилення Це встановзаючому контакті ТА, який, в свою чергу, відповілення викликає появу гістерезисної функції при педає десятковим числам від 49 до 255 ремиканні між установленнями a2d підпрофама 520 в кроці виміряного аналоЦе є корисним для запобігання небажаних гового сигналу 522 перетворює аналоговий сигстрибків у вихідному сигналі індикаторної схеми нал, виміряний на контактному штирку 14 мікроПідпрограма встановлення режиму /setmode/ процесорного пристрою управління, в цифрове 560 встановлює режим високого розрізняння або значення під час запиту a2dlow підпрофамою 500, низького розрізняння для АЦП Підпрограма в кроі перетворює аналоговий сигнал, виміряний на коці 562 включає порівняння ТА рівня з межею висонтактному штирку 15 мікропроцесорного пристрою кого розрізняння Програма встановлює в кроці управління, в цифрове значення під час запиту 564 бгговий флаг високого розрізняння на високий a2dhigh підпрограмою 510 Потім a2d підпрофама або логічну "істину", якщо ТА рівень перевищує 520 входить в режим очікування 522 для забезпемежу високого розрізняння В протилежному випачення можливості завершення перетворення АЦП дку в кроці 566 програма встановлює біт високого При завершенні перетворення мікропроцесорний розрізняння на низький чи "несправжність" Після пристрій управління генерує переривання в кроці встановлення бітового флага високого розрізняння 524, яке містить вектор адреси до a2dmt підпрограпрограма повертається до програми, яка и запитуми 528 a2dmt підпрофама 528 відшукує та запавала м'ятовує дані аналого-цифрового перетворення і tafmd підпрограма 570 використовує ТА рівень закінчує роботу ВІДПОВІДНОГО апаратного засобу для визначення калібровки, яка необхідна для усу530 a2dmt вання будь-яких небажаних характеристик в сигналі на виході схеми вимірювання опору, В наведепідпрограма повертається до a2d підпрограми, ному тут найкращому втіленні активна калібровка яка, в свою чергу, повертається до підпрограми, сприймає ТА рівень для виявлення змін у встановяка її запитувала ленні ТА У випадку подільника напруги програмПідпрограма встановлення підсилення 540 пений діапазон напруги, з якого може вимірюватись ремикає підсилюючий резистор в схемі зі змінним зміна в опорі, зменшується в прямій залежності від опором між частинами високого та низького прозбільшення в ТА рівні буферизованої напруги Кограмованих коефіцієнтів підсилення схеми зі змінли ТА рівень стає більшим, або перевищує найкраним опором Підпрограма встановлення підсиленщий ТА діапазон опору 5 - 12,5кОм, амплггуда сигня включає перевірку електричного потенціалу для налу, який відтворює зміни в опорі живого тіла, ВІДвизначення встановлений ТА АЦП в режим висоПОВІДНО і небажано зменшується, tafmd підпрофакого розрізняння чи в режим низького розрізняння ма долає цю проблему шляхом визначення рівня Якщо встановлено режим високого розрізняння, регулювання в схемі зі змінним опором для компекрок 542, тоді програма здійснює перехід до активнсації цих змін з використанням довідкових табного кроку програмованого високого коефіцієнту лиць для ВІДПОВІДНОГО регулювання зворотного підсилення 544 В протилежному випадку має місзв'язку в схемі підсилення для компенсації змін в це додаткова перевірка В цьому випадку при поріТА напрузі та підтримання калібровки виміряного внянні ТА рівня з низькою межею програмованого сигналу, tafmd підпрофама 570 містить крок встапідсилення крок 546 переходить до активного кроновлення 572, який визначає місцезнаходження ку програмованого високого підсилення 544, якщо правильної довідкової таблиці для будь-якої схеми ТА рівень більше низької межі програмованого підвимірювання опору типу подільника напруги або силення В протилежному випадку виконується дотипу моста опору Потім, в кроці 574, перевіряєтьдаткова перевірка В цьому випадку при порівнянні ся чи знаходиться пристрій в стані високого, чи ниТА рівня з високою межею програмованого підсизького розрізняння Якщо розрізняння високе, вилення крок 548 переходить до активного кроку значається місцеположення частини довідкової програмованого низького підсилення 550Т якщо таблиці для високого розрізняння в кроці пам'яті ТА рівень менше високої межі програмованого під576 Потім мікропроцесорний пристрій управління силення В протилежному випадку програма перезавантажує ТА рівень та величини довідкової табходить до активного кроку програмованого високолиці в пам'ять в підготовчому кроці 578 Потім ТА го підсилення 544 Для кроку 544 або кроку 550 рівень перевіряється в кроці перевірки ТА 580 підпрограма конфігурує фіксуючий вивід програмошляхом порівняння з ТА індексним значенням ваного підсилення 552 до ВІДПОВІДНОГО ВИСОКОГО Табличні величини зчитуються мікропроцесорним або низького положення встановлення Потім пристроєм управління за порядком від самого ниsetboost підпрограма повертається до програми, 10 22 21 44323 зького до самого високого Якщо ТА рівень менше ті низьковольтних /вивід 76/ потенціалів та опорів індексу, в кроці 582 завантажується наступне ТА підсилення, які встановлюються в змінному опорі індексне значення, і програма повертається до 42 кроку перевірки 580 В протилежному випадку в В процесі роботи пристрій ІНІЦІЮЄТЬСЯ шляхом довідковому кроці 584 завантажується відповідна регулювання підстроєчного змінного резистору 60 величина цифрового потенціометра Потім у кроці /фіг 3/схеми перемикання підсилення 48/фіг 4В/1 586 встановлення зміни в цифровому потенціометоргану управління чутливістю /не показано/ таким рі завантажуються величини, необхідні для зміни чином, що вивід низьковольтного потенціалу 76 опору в цифровому потенціометрі Потім підпрог/фіг 3/ балансується для перевірочного опору 68 рама повертається до програми, яка її запитувала вимірювального приладу в 5кОм Потім живе тіло поєднується до ЗОВНІШНІХ виводів 64 та 66 схеми dpset підпрограма 590 конфігурує мікропроцевимірювання опору Для балансування схеми ВІДсорний пристрій управління для регулювання цифПОВІДНО до загального опору живого тіла ручний рового потенціометра Підпрограма 590 містить регулятор 78 просувають доти, доки в низьковолькрок завантаження регістра 592, крок обчислення тному виводі 76 не буде досягнуто балансу з заганового місцеположення 594 та крок перевірки 596 льним опором живого тіла На протязі проміжку чадля визначення чи є нова величина вищою, чи нису, коли напруга на виводі 76 змінюється для досяжчою Якщо величина вища, виконується крок 598 гнення балансу з загальним опором живого тіла, флага напряму встановлення для руху вгору, або схема зворотного зв'язку 52 /фіг 2 та 4С/ забезпеж виконується крок 600 флага напряму встановчує подачу змін напруги на низьковольтному виволення для руху вниз Потім завантажуються велиді 76 на схемі управління 54 Схема управління 54, чини для того, щоб почати калібровку цифрового яка звичайно знаходиться в режимі очікування, потенціометра 602 Потім підпрограма повертаєтьпробуджується для зміщення ручного регулятора ся до програми, яка її запитувала 78 під час подачі сигналу за допомогою цифрової clkdp підпрограма 610 калібрує цифровий посхеми 28 Схема управління 54 контролює рух ручтенціометр у ВІДПОВІДЬ на рівень напруги, виміряного регулятора 78 до завершення регулювання ний від ТА потенціометра Підпрограма містить Під час завершення регулювання схема управлінкрок флага напряму перевірки 612 Якщо флаг є ня 54 визначає величину регулювання підсилення високим, на цифровий потенціометр подається сиз використанням довідкової таблиці і подає сигнал гнал для рахування вгору в кроці 614 Якщо флаг є на схему компенсації 55 для регулювання коефіцінизьким, на цифровий потенціометр подається сиєнту підсилення схеми підсилення Коефіцієнт підгнал для рахування вниз в кроці 616 Потім в кроці силення регулюється для усування небажаних ха618 робиться перевірка відсутності руху Якщо змірактеристик зниження чутливості у ВІДПОВІДЬ на на є нульовою, підпрограма повертається до прозбільшення низьковольтного потенціалу в виводі грами, яка її запитувала В протилежному випадку 76 Коефіцієнт підсилення регулюється автоматичцифровий потенціометр ІНІЦІЮЄТЬСЯ в кроці 620 но таким чином, що чутливість підтримується на для того, щоб почати змінювати змінний опір На сталому рівні незалежно від змін низьковольтного цифровий потенціометр подається сигнал для шпотенціалу в виводі 76 крементної зміни на одну одиницю напряму, який визначено на протязі виконання кроку напряму пеВ альтернативному втіленні схеми калібровки ревірки Інкрементна зміна являє собою 1000м з в схему підсилення включається керований напрувикористанням найкращого цифрового потенціогою операційний підсилювач /не показано/ В цьометра Потім запитується підпрограма затримки в му втіленні низьковольтний вивід 76 підключають кроці 624 для забезпечення можливості прийому і до входу для управляючої напруги підсилювача обробки сигналу цифровим потенціометром при Підсилювач може розміщуватись з послідовним негативному прирості та перевірці лічильника в з'єднанням негативного вхідного виводу з вихідкроці 626 Якщо лічильник не на нулі /рахунок більним виводом на вихідному виводі, який відповідає ше нуля/, програма повертається до кроку подачі виводу 130/фіг 4А/повторювача напруги Позитисигналу 622 і просуває цифровий потенціометр на вний вхідний вивід повинен був би приєднуватись інший шкрементний крок Після досягнення лічильдо джерела постійної високої напруги Цей операником нуля програма закінчується і повертається ційний підсилювач калібрує коефіцієнт підсилення до кроку програми, в якому и запитували підсилювача пропорційно змінам потенціалу низької напруги Операційним підсилювачем, що підходить для цієї мети, є підсилювач типу моделі VCA610, який виробляється фірмою Burr Brown of Tuscon, Arizona З вищенаведеного опису повинно бути зрозумілим, що даний винахід може бути використано для активної калібровки підсилювача до будь-якої відомої заданої небажаної характеристики Цього можна досягти при ідентифікації характеристики та и ВІДПОВІДНОСТІ до зміненої зміни у внутрішніх сигналах Мікропроцесор містить "ДОВІДКОВІ таблиці" коефіцієнтів компенсації, які зберігаються в пристрої запам'ятовування і які було виведено емпірично шляхом вимірювання амплггуди зміни даного опору для кожної точки, відібраної з загального вхідного опору На основі цих коефіцієнтів компенсації можуть бути обчислені необхідні коефіцієнти підсилення та їх ВІДПОВІДНІ опори зворотного зв'язку, тим самим встановлюючи таблицю ВІДПОВІДНОС В другому альтернативному втіленні схеми калібровки ручний регулятор 78 може містити звичайний спарений змінний резистор, в якому другий резистор може мати ступінчасто зростаюче регулювання в нелінійному оберненому опорі до величини змінного резистору 82/фіг 3/ Другий змінний резистор приєднувався б між виводом опорної напруги /фіг 4С/та негативним вхідним виводом схеми другого операційного підсилювача /фіг 4В/ Друге втілення, в якому зовнішня радіоперешкода може зменшуватись, додатково містить по 11 23 44323 24 криття з фарби, яка Ізолює радіоперешкоду і яка щими втіленнями, які існують на СЬОГОДНІШНІЙ наноситься на внутрішню поверхню корпуса продень, цілком очевидно, що винахід не повинен обпонованого пристрою Придатна для цієї мети фамежуватись описаними втіленнями, а навпаки, рорба виробляється американською фірмою зуміється, що він охоплює різні модифікації та еквіSandstrom Products Co і продається під торговою валентні пристрої, які знаходяться в межах суті вимаркою Sanpro A405, і відома також як фарба, яка находу, викладеної в доданій формулі винаходу, а створює захисне срібне покриття від електромагніоб'єм його повинен мати найбільш широку інтертної перешкоди/радіоперешкоди претацію для того, щоб охоплювати всі такі модифікації та еквівалентні конструкції Незважаючи на те, що даний винахід було описано у зв'язку з найбільш практичними найкра ФІГ.1 Фіг. 2 12 25 44323 Фіг. З 13 27 44323 14 29 44323 15 ЗО 31 44323 16 32 33 44323 34 .444 ТА рівня в режимі низького розрізняння Зз підпрограмою вимірюваний ТА рівня в режим* високого розрізняння Запам'ятовування виміряного ТА рівня в ЗП з ДОВІЛЬНИМ доступом для перевірки 450 Фіг. 5С-2 Фіг. 5Д-1 17 35 44323 Фіг. 5-Д2 Підпрограма dly1 / Встановлення фік \—482 \ сованої тривалості Часова затримка на один квант часу ^/Ч 46 8 s ^ Виявлення ВІДПОВІДНОГ цифрової величини ДР для ТА різня яка знаходиться з довідкової таблиці Ініціалізація та встановлення необхідних змінних з ВІДПОВІДНИМИ величинами Повертання з результатами до початкової адреси Фіг. 14 21 ні і Забезпечення готовності перевірки наступ ної величини в ДОВІДКО вій таблиці -58* -586 43 44323 Підпрограма DPSET 44 -530 / Ініціалізація та вста- N -592 \^ новлєння змінних э поточ\ и ш и величинами ДР / \ Обчислення нового місцеположення 594 для виявленої величини ДР 595 /600 Очистка флага напряму ДР для руху вниз Встановлення флага напряму ДР для руху вгору -59S Встановлення змінних для •602 нової величини Д Р L Повертання з результатами до початкової адреси Фіг. 15 Підпрограма CIKDP ,512 *-^ Чи встановлено • ^ ф л а г напряму ДР ^. НІ Ъ-^ [ так ,515 Команда J3F рухатись Команда ДР рухатись 2 вгору ініціалізація крокової послідовності ДР за " допомогою наперед обчислених величин Виконання «рокоЕсі ПОСЛІДОВНОСТІ ДР -522 За підпрограмою DLY1 часова зтримка кожного крону до встановлення величини 624 Б26 ФІГ. 16 22 45 44323 46 ДП "Український інститут промислової власності "(Укрпатент) Україна, 04119, Киів-119, вул сім'ї Хохлових, 15 (044) 456-20-90 23
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A61B 5/053
Мітки: система, визначення, зарядженого, змін, тіла, опори, виміру
Код посилання
<a href="https://ua.patents.su/23-44323-sistema-dlya-viznachennya-ta-vimiru-zmin-v-opori-zaryadzhenogo-tila.html" target="_blank" rel="follow" title="База патентів України">Система для визначення та виміру змін в опорі зарядженого тіла</a>
Пристрій для визначення патологічних змін в тканинах щелеп
Номер патенту: 28989
Опубліковано: 16.10.2000
Автори: Атанасов Олександр Олександрович, Бурдух Віктор Михайлович, Гулюк Анатолій Георгійович, Сєбов Валерій Іванович, Крикляс Генріх Генадійович
МПК: A61B 5/053, G01N 27/02
Мітки: змін, пристрій, тканинах, патологічних, щелеп, визначення
Формула / Реферат:
Пристрій для визначення потологічних змін в тканинах щелеп, який складається з генератора низької частоти з можливістю вироблення коливань синусоїдальної форми, двокаскадного підсилювача та реєструючого приладу, який відрізняється тим, що він додатково містить схему порівняння з можливістю визначення різниці фаз реактивного опору порівнювальних органів.
Перетворювач змін частоти сигналу у фазовий зсув
Номер патенту: 36610
Опубліковано: 16.04.2001
Автор: Рапін Володимир Васильович
МПК: H03L 7/00
Мітки: частоти, сигналу, фазовий, зсув, перетворювач, змін
Текст:
...до входу др угого підсилювача з автоматичним регулюванням підсилення 7, вихід цього підсилювача з'єднаний з другими входами блоків формування сигналу синхронізації 2, 3, 4 (n+1 блок). Структурна схема блоку формування сигналу синхронізації містить послідовно з'єднані суматор 8 і підсилювач з автоматичним регулюванням підсилення 9, причому перший та другий входи суматора 8 є також першим та другим входами блоку формування сигналу...
Інтерферометр для визначення локальних змін показника заломлення ізотропних твердих тіл
Номер патенту: 40474
Опубліковано: 16.07.2001
Автор: Гомоннай Олександр Васильович
МПК: G01N 21/45
Мітки: твердих, локальних, ізотропних, змін, визначення, тіл, заломлення, показника, інтерферометр
Формула / Реферат:
Інтерферометр для визначення локальних змін показника заломлення ізотропних твердих тіл, що містить оптично зв'язані джерело випромінювання, плоскопаралельну світлоподільну пластину, відбивач, опорну оптичну газову кювету, комутатор та датчик його положення, фотоприймач, блок зчитування та обробки інформації, об'єктив, який відрізняється тим, що додатково містить компенсатор, оптичну кювету і пристрій для зміни в ній тиску еталонного газу та...
Пристрій для виміру тиску
Номер патенту: 33403
Опубліковано: 15.02.2001
Автори: Осадчук Володимир Степанович, Осадчук Олександр Володимирович, Білоконь Наталія Леонідовна
МПК: G01L 7/00
Мітки: виміру, тиску, пристрій
Текст:
...джерела напруги з'єднаний із стоком другого по льового транзистора, витоки першого і другого польових транзисторів з'єднані між собою, а затвор другого польового транзистора з'єднаний із стоком першого польового транзистора, до якого підключена перша вихідна клема та перший ви від пасивної індуктивності, другий вивід пасивної індуктивності з'єднаний з першим виводом конденсатора і першим полюсом другого джерела напруги, другий вивід...
Мікроелектронний пристрій для виміру тиску
Номер патенту: 40237
Опубліковано: 16.07.2001
Автори: Осадчук Володимир Степанович, Осадчук Олександр Володимирович
МПК: H04R 19/00, G01L 9/04
Мітки: тиску, виміру, мікроелектронний, пристрій
Формула / Реферат:
Мікроелектронний пристрій для виміру тиску, який містить джерело постійної напруги і резистор, який відрізняється тим, що введені тензочутливий тунельно-резонансний діод, пасивна індуктивність і конденсатор, причому перший полюс джерела постійної напруги з'єднаний з першим виводом резистора, першим виводом конденсатора і першим виводом тензочутливого тунельно-резонансного діода, а другий вивід тензочутливого тунельно-резонансного діода...
Попередній патент: Спосіб виготовлення підкладок із монокристалічного корунда (a-al2o3 )
Наступний патент: Спосіб пресування виробів із сумішей
Випадковий патент: Паштет м'ясний з грибами бланшованими