Пристрій керування візком фронтальної дощувальної машини
Формула / Реферат
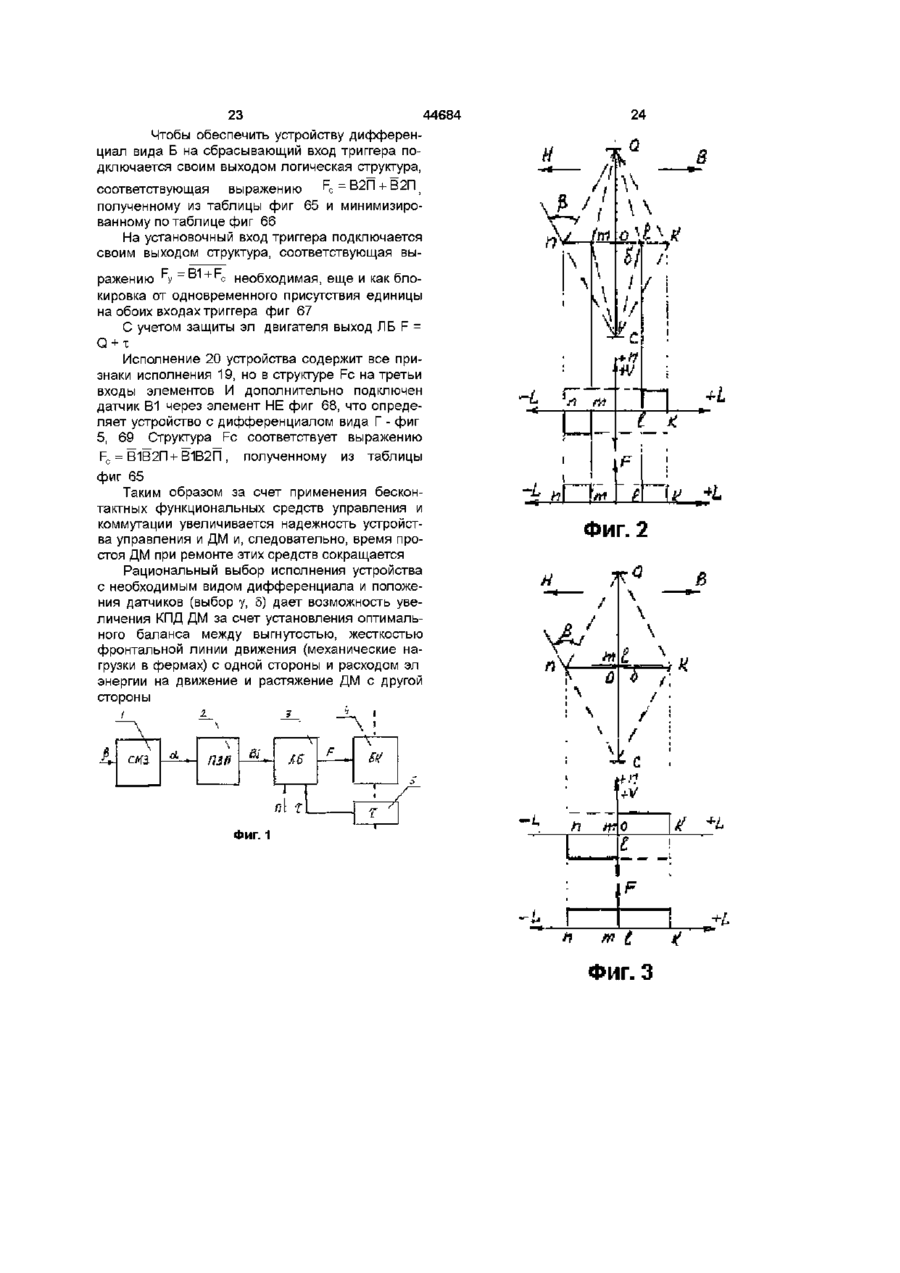
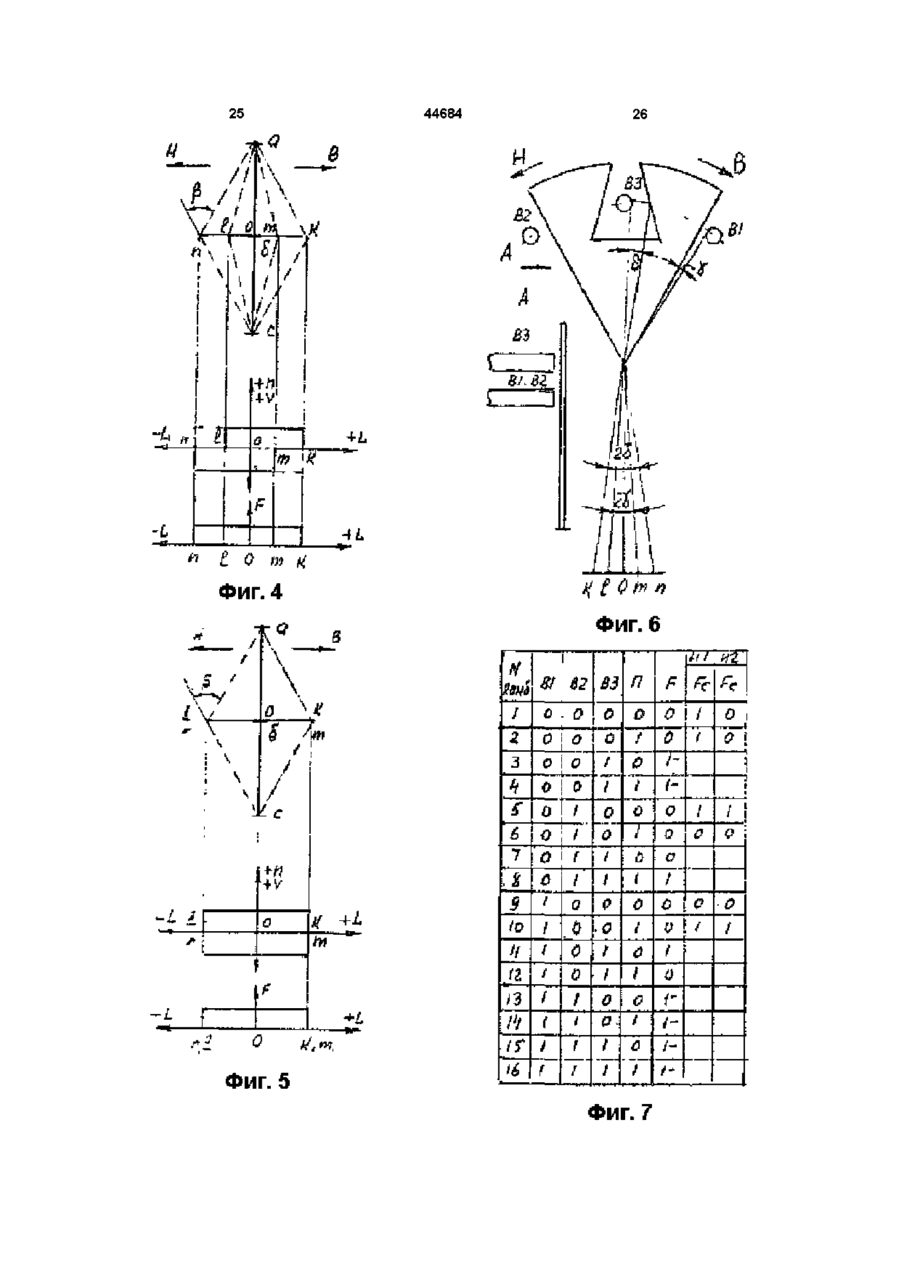
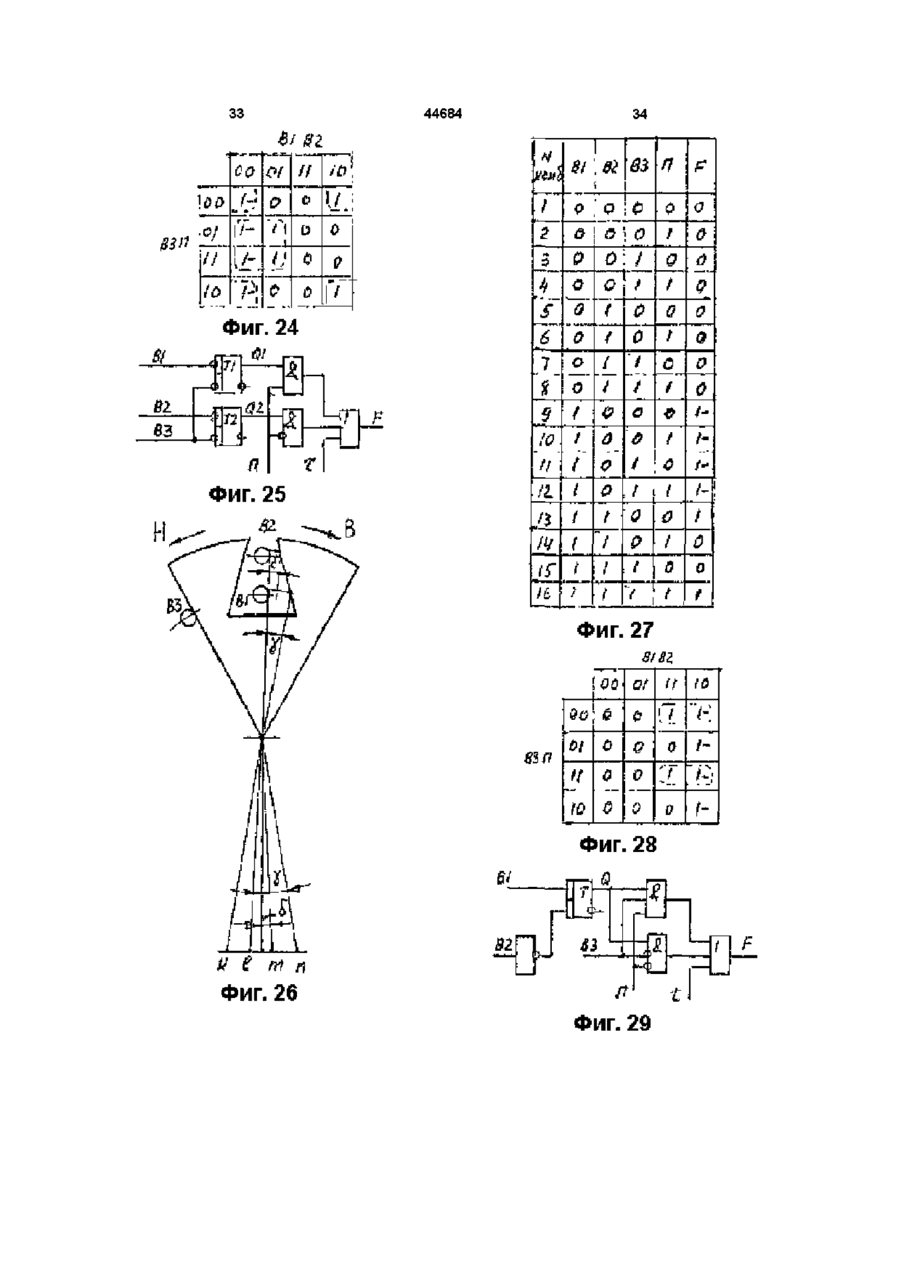
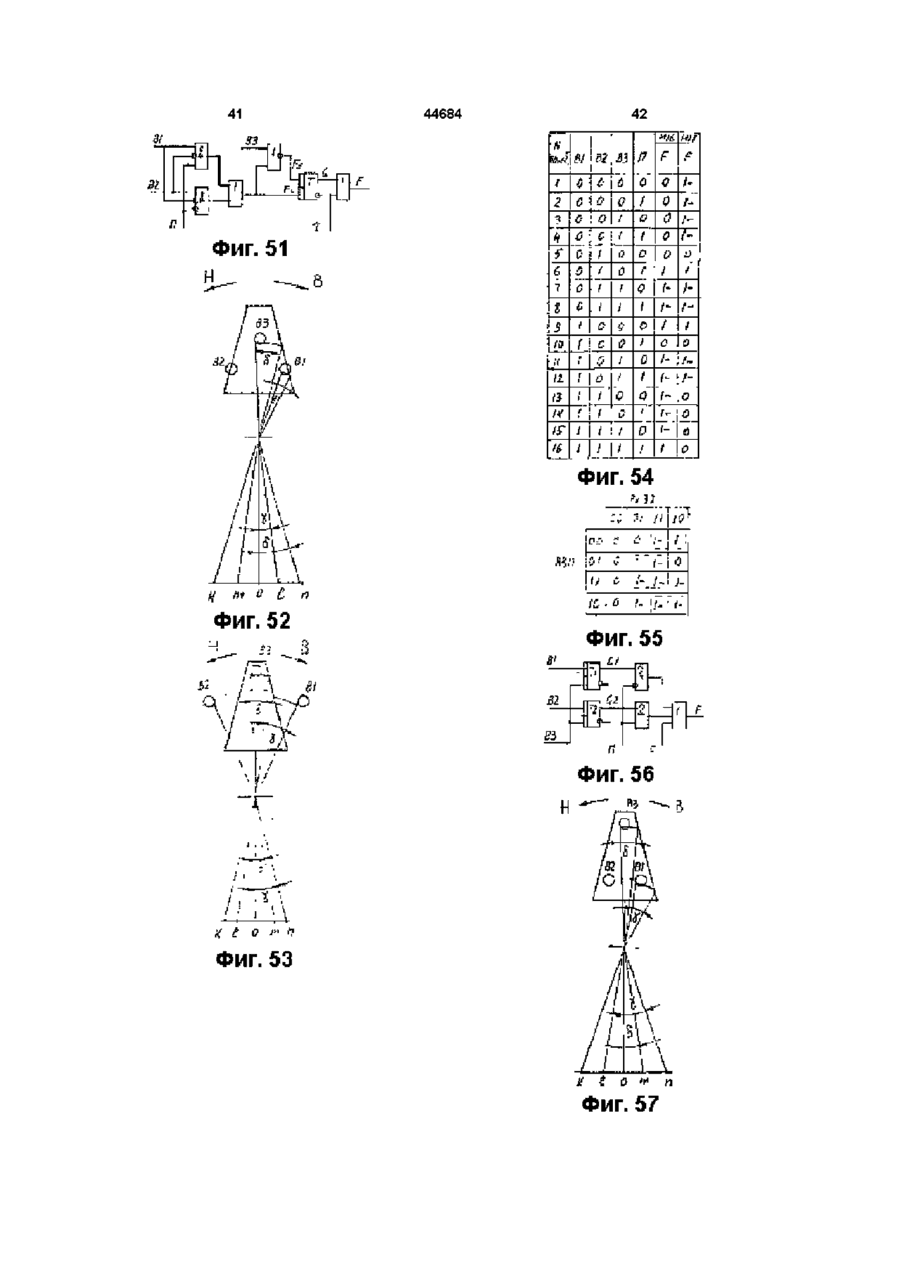
1. Устройство управления тележкой фронтальной дождевальной машины, содержащее систему механических звеньев, блок коммутации электродвигателя, блок защиты электродвигателя и преобразовательно – командное звено, связанное одним входом с выходом системы механических звеньев и другим входом - с переключателем направления движения дождевальной машины, а выходом - с входом блока коммутации электродвигателя, отличающееся тем, что преобразовательно - командное звено состоит из последовательно соединенных преобразователя заданных перемещений и логического блока, который своим выходом сигнала F соединен с входом блока коммутации электродвигателя, а входами – с выходами переключателя направления движения дождевальной машины, блока защиты электродвигателя, преобразователя заданных перемещений, при этом в преобразователе заданных перемещений размещены подключаемые выходами к входам логического блока датчики сигналов с возможностью регулирования их положения и бесконтактного взаимодействия с элементом перемещений, соединенного с выходом системы механических звеньев, а логический блок содержит триггеры и совокупности логических элементов, которые представлены структурами, подключенными к выходам триггеров и реализующими выражение ![]() и структурами, подключенными своими выходами на установочные и сбрасывающие входы триггеров и реализующими, соответственно, выражения
и структурами, подключенными своими выходами на установочные и сбрасывающие входы триггеров и реализующими, соответственно, выражения ![]() ,
, ![]() ,
,
где ![]() - сигналы на выходах, соответственно, блока защиты электродвигателя, датчиков сигналов, триггеров, переключателя направления движения дождевальной машины и на входах логического блока, a Fуj и Fcj – сигналы с выходов структур, подключенных, соответственно, на установочных и сбрасывающих входах триггеров, и также i=1,2… j=1,2…порядковые числа.
- сигналы на выходах, соответственно, блока защиты электродвигателя, датчиков сигналов, триггеров, переключателя направления движения дождевальной машины и на входах логического блока, a Fуj и Fcj – сигналы с выходов структур, подключенных, соответственно, на установочных и сбрасывающих входах триггеров, и также i=1,2… j=1,2…порядковые числа.
2. Устройство по п. 1, отличающееся тем, что в преобразователе заданных перемещений элемент перемещений имеет две зоны воздействия на датчики сигналов, каждая из которых относительно оси симметрии элемента перемещений есть зеркальное отражение другой.
3. Устройство по п. 2, отличающееся тем, что в преобразователе заданных перемещений элемент перемещений выполнен в виде металлической фигурной пластины с трапецеидальным вырезом, ось симметрии которого совпадает с осью симметрии фигурной пластины.
4. Устройство по п. 2, отличающееся тем, что между внутренними сторонами зон воздействия элемента перемещений при нейтральном его положении расположен датчик сигнала В3, а у внешних – датчики сигналов В1, В2, при этом датчик сигнала В3 равноудален на расстояние ![]() от внутренних сторон зон воздействия, а датчики сигналов В1, В2 – на расстояние
от внутренних сторон зон воздействия, а датчики сигналов В1, В2 – на расстояние ![]() от внешних.
от внешних.
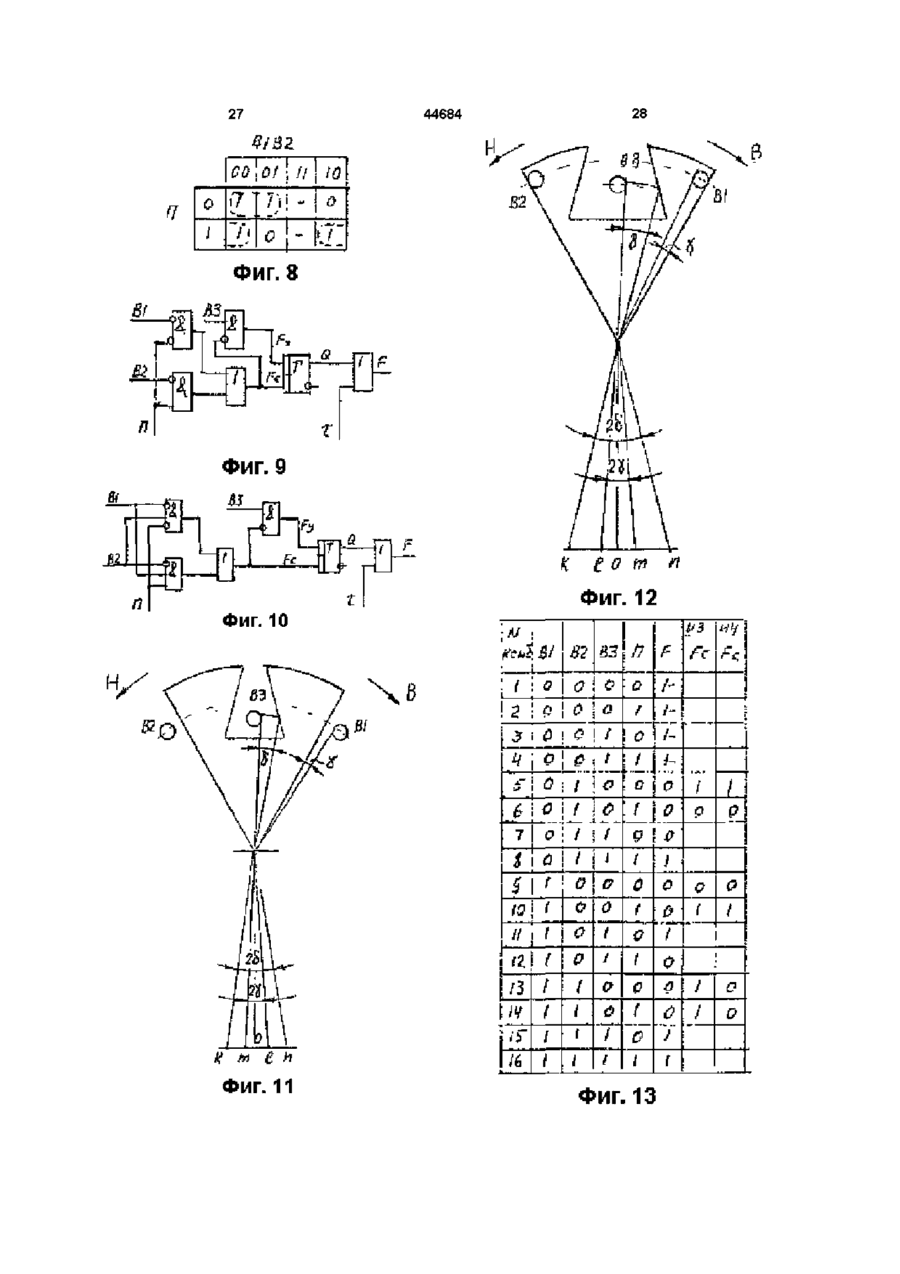
5. Устройство по п. 4, отличающееся тем, что расстояние ![]() удаления датчиков сигналов В1, В2 во вне зон воздействия элемента перемещений меньше расстояния
удаления датчиков сигналов В1, В2 во вне зон воздействия элемента перемещений меньше расстояния ![]() удаления датчика сигнала В3
удаления датчика сигнала В3 ![]() , а логический блок представлен триггером и структурами, реализующими выражения
, а логический блок представлен триггером и структурами, реализующими выражения ![]() ,
, ![]() или преобразованные из них.
или преобразованные из них.
6. Устройство по п. 4, отличающееся тем, что расстояние ![]() во вне зон воздействия элемента перемещений меньше
во вне зон воздействия элемента перемещений меньше ![]()
![]() , а логический блок представлен триггером и структурами, реализующими выражения
, а логический блок представлен триггером и структурами, реализующими выражения ![]()
![]() или преобразованные из них.
или преобразованные из них.
7. Устройство по п. 4, отличающееся тем, что расстояние ![]() удаления во внутрь зон воздействия сторон датчиков сигналов В1, В2, обращенных к оси симметрии элемента перемещений, меньше расстояния
удаления во внутрь зон воздействия сторон датчиков сигналов В1, В2, обращенных к оси симметрии элемента перемещений, меньше расстояния ![]() удаления датчика сигнала В3, а логический блок представлен триггером и структурами, реализующими выражения
удаления датчика сигнала В3, а логический блок представлен триггером и структурами, реализующими выражения ![]()
![]() или преобразованные из них.
или преобразованные из них.
8. Устройство по п. 4, отличающееся тем, что расстояние ![]() удаления во внутрь зон воздействия сторон датчиков сигналов В1, В2, обращенных к оси симметрии элемента перемещений, меньше расстояния
удаления во внутрь зон воздействия сторон датчиков сигналов В1, В2, обращенных к оси симметрии элемента перемещений, меньше расстояния ![]() удаления датчика сигнала В3, а логический блок представлен триггером и структурами, реализующими выражения
удаления датчика сигнала В3, а логический блок представлен триггером и структурами, реализующими выражения ![]() ,
, ![]() или преобразованные из них.
или преобразованные из них.
9. Устройство по п. 4, отличающееся тем, что расстояние ![]() удаления датчиков сигналов В1, В2 во вне зон воздействия больше расстояния
удаления датчиков сигналов В1, В2 во вне зон воздействия больше расстояния ![]() удаления датчика сигнала В3
удаления датчика сигнала В3 ![]() , а логический блок содержит триггеры и структуры, реализующие выражения
, а логический блок содержит триггеры и структуры, реализующие выражения ![]() Fy1=B1, Fy2=B2 или преобразованные из них.
Fy1=B1, Fy2=B2 или преобразованные из них.
10. Устройство по п. 4, отличающееся тем, что расстояние ![]() удаления во внутрь зон воздействия элемента перемещений сторон датчиков сигналов В1, В2, обращенных к оси симметрии элемента перемещений, больше расстояния
удаления во внутрь зон воздействия элемента перемещений сторон датчиков сигналов В1, В2, обращенных к оси симметрии элемента перемещений, больше расстояния ![]() удаления датчика сигнала В3
удаления датчика сигнала В3 ![]() , а логический блок содержит триггеры с инверсными входами и структуры, реализующие выражения
, а логический блок содержит триггеры с инверсными входами и структуры, реализующие выражения ![]() или преобразованные из них.
или преобразованные из них.
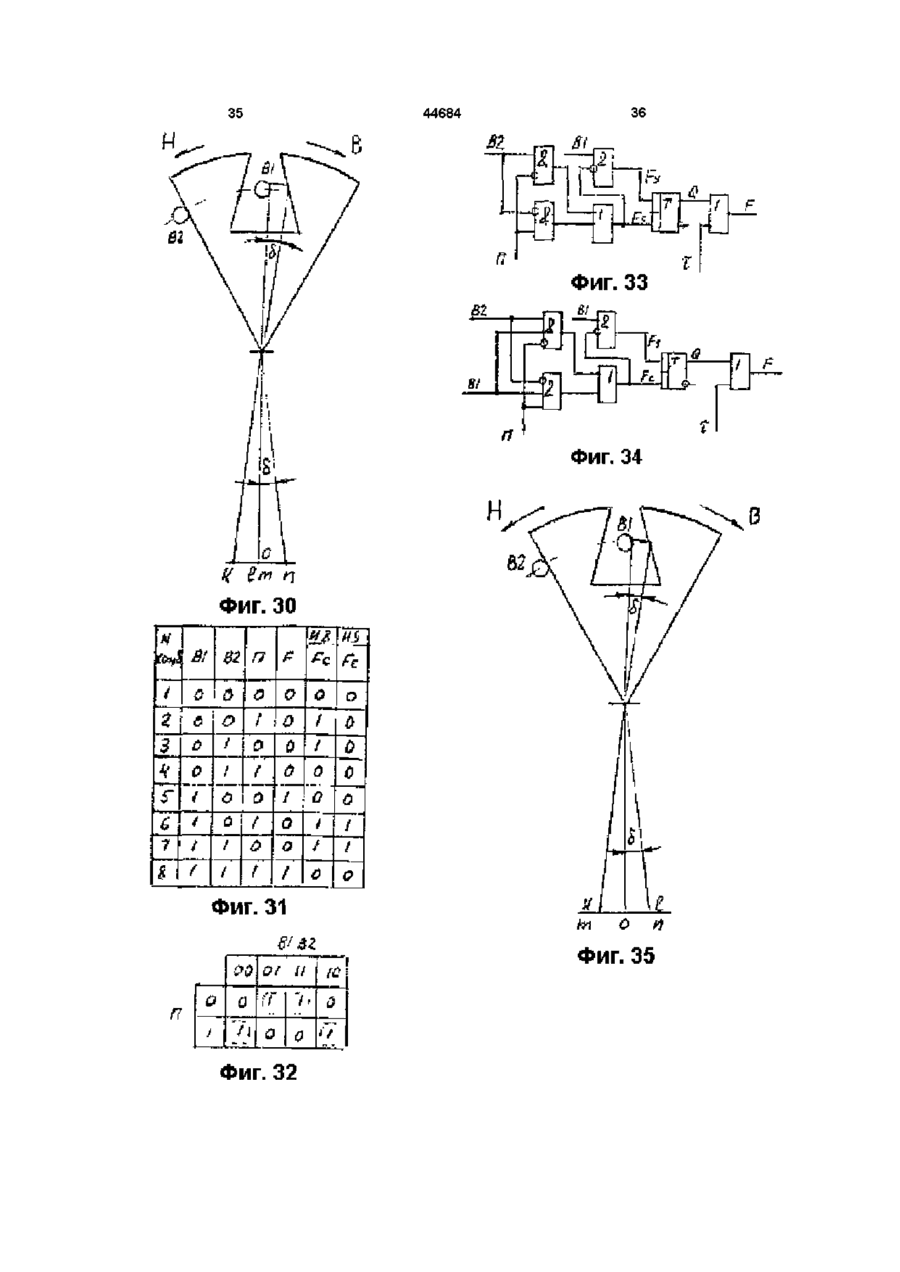
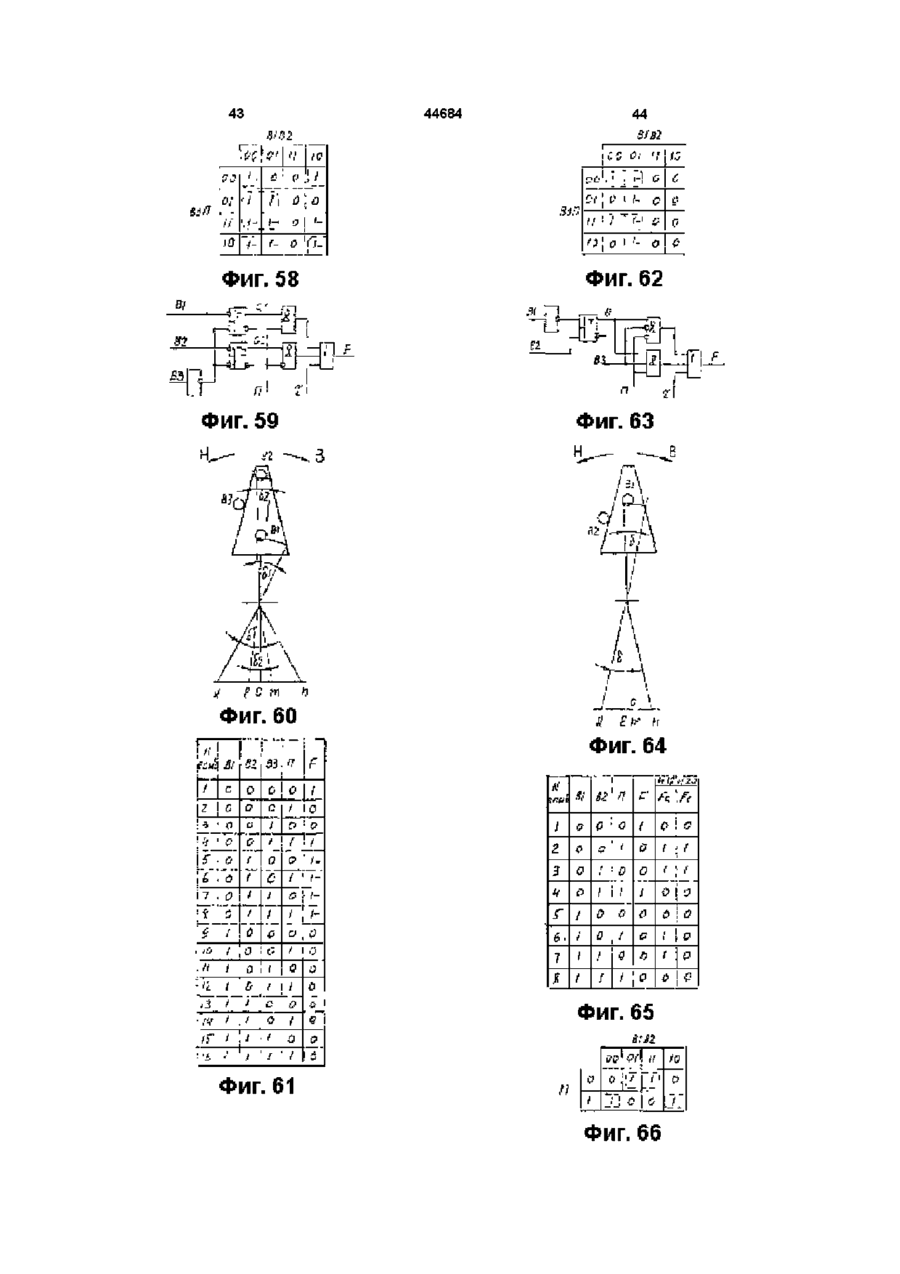
11. Устройство по п. 2, отличающееся тем, что между внутренними сторонами зон воздействия элемента перемещений, при нейтральном его положении, расположены один под другим датчики сигналов В1, В2 и у внешней стороны - датчик сигнала В3, при этом каждый из датчиков сигналов В1, В2 равноудален от внутренних сторон зон воздействия, но датчик сигнала В2 – удалён меньше, а логический блок содержит триггер и структуры, реализующие выражения ![]() или преобразованные из них.
или преобразованные из них.
12. Устройство по п. 2, отличающееся тем, что между внутренними сторонами зон воздействия элемента перемещений, при нейтральном положении, размещен датчик сигнала В1 и у внешней - датчик сигнала В2, при этом датчик сигнала В1 равноудален от внутренних сторон зон воздействия, а логический блок содержит триггер и структуры, реализующие выражения ![]() ,
, ![]() или преобразованные из них.
или преобразованные из них.
13. Устройство по п. 2, отличающееся тем, что между внутренними сторонами зон воздействия элемента перемещений при нейтральном положении размещен датчик сигнала В1 и у внешней - датчик сигнала В2, при этом датчик сигнала В1 равноудален от внутренних сторон зон воздействия, а логический блок содержит триггер и структуры, реализующие выражения ![]() ,
, ![]() или преобразованные из них.
или преобразованные из них.
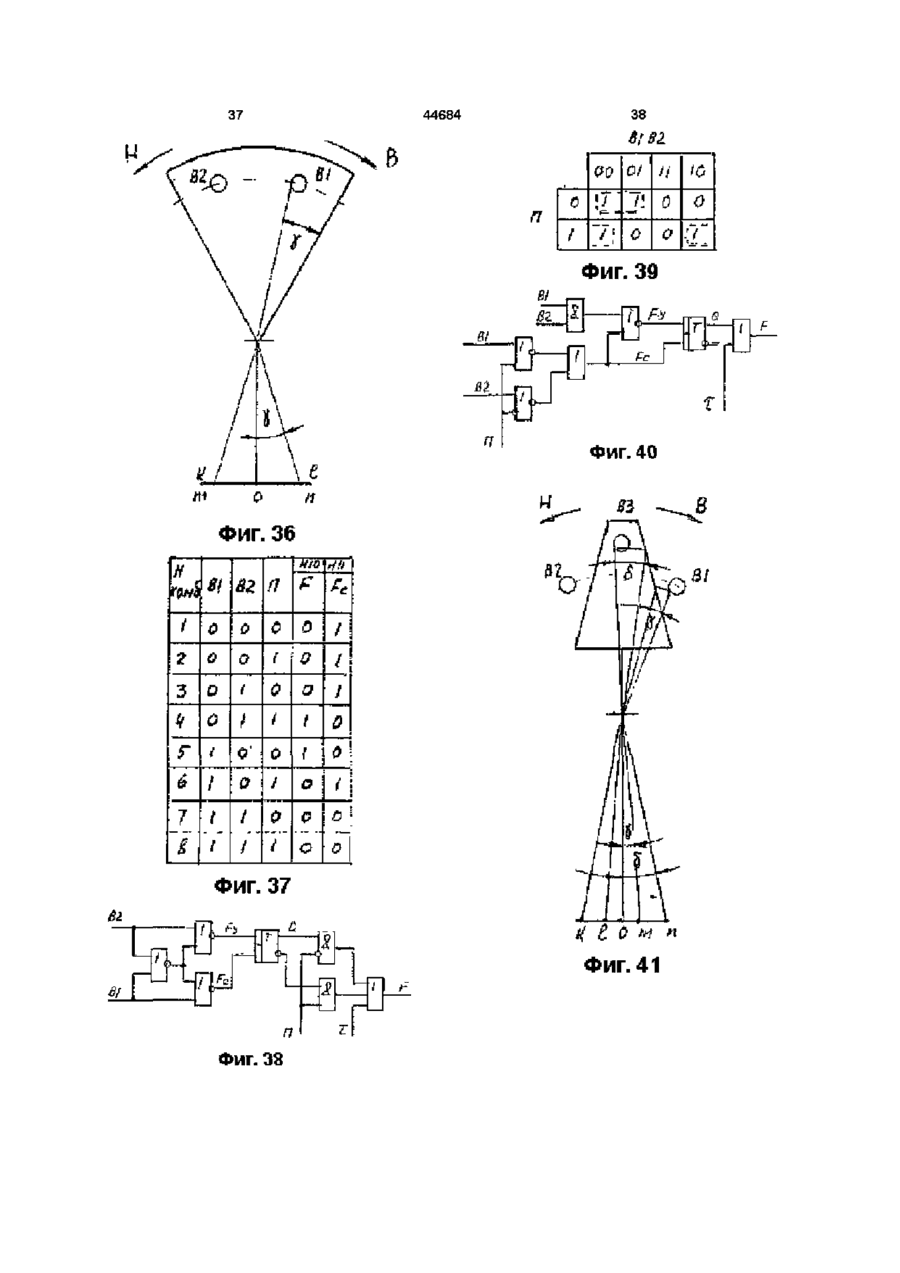
14. Устройство по п. 1, отличающееся тем, что в преобразователе заданных перемещений элемент перемещений имеет одну симметричную зону воздействия.
15. Устройство по п. 14, отличающееся тем, что в преобразователе заданных перемещений элемент перемещений есть металлическая фигурная пластина.
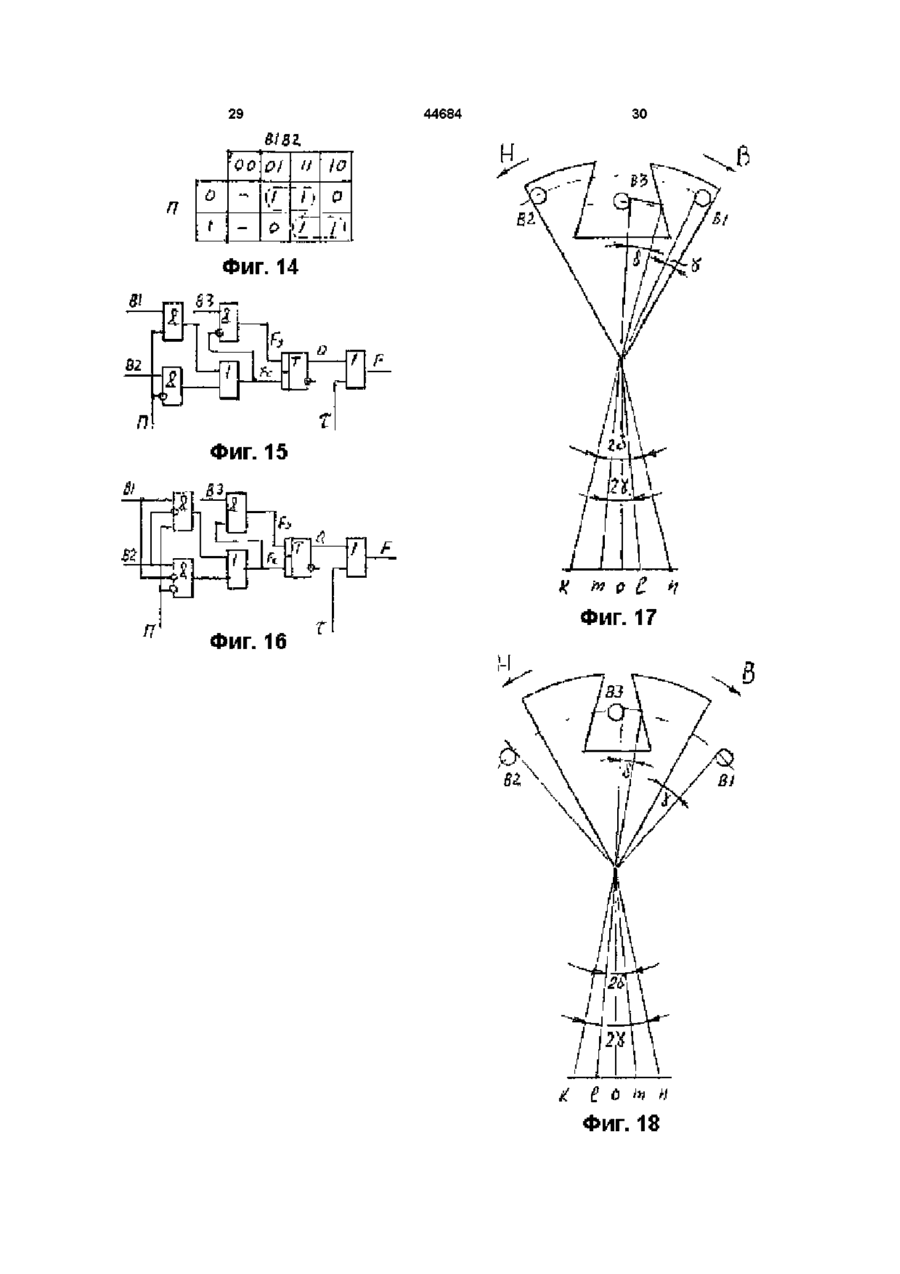
16. Устройство по п. 14. отличающееся тем, что при нейтральном положении элемента перемещений зона воздействия расположена напротив двух датчиков сигналов, каждый из которых равноудален от своей боковой стороны зоны воздействия к оси симметрии ее, а логический блок содержит триггер и структуры, реализующие выражения ![]() или преобразованные из них.
или преобразованные из них.
17. Устройство по п. 14, отличающееся тем, что при нейтральном положении элемента перемещений зона воздействия расположена напротив двух датчиков сигналов, каждый из которых равноудален от своей боковой стороны зоны воздействия к оси симметрии ее, а логический блок содержит триггер и структуры, реализующие выражения ![]() ,
, ![]() или преобразованные из них.
или преобразованные из них.
18. Устройство по п. 14, отличающееся тем, что при нейтральном положении элемента перемещений датчик сигнала В3 расположен между боковыми сторонами зоны воздействия и датчики сигналов В1, В2 возле них, при этом датчик сигнала В3 равноудален от обеих сторон на расстояние ![]() , и датчики сигналов В1, В2 равноудалены каждый от своей стороны зоны воздействия на расстояние
, и датчики сигналов В1, В2 равноудалены каждый от своей стороны зоны воздействия на расстояние ![]() .
.
19. Устройство по п. 18, отличающееся тем, что расстояние ![]() от сторон зоны воздействия во вне до датчиков сигналов В1, В2 меньше, чем расстояние
от сторон зоны воздействия во вне до датчиков сигналов В1, В2 меньше, чем расстояние ![]() от этих же сторон до датчика сигнала В3
от этих же сторон до датчика сигнала В3 ![]() , а логический блок содержит триггер и структуры, реализующие выражения
, а логический блок содержит триггер и структуры, реализующие выражения ![]()
![]() или преобразованные из них.
или преобразованные из них.
20. Устройство по п. 18, отличающееся тем, что расстояние ![]() от сторон зоны воздействия во вне до датчиков сигналов В1, В2 меньше, чем расстояние
от сторон зоны воздействия во вне до датчиков сигналов В1, В2 меньше, чем расстояние ![]() от этих же сторон до датчика сигнала В3
от этих же сторон до датчика сигнала В3 ![]() , а логический блок содержит триггер и структуры, реализующие выражения
, а логический блок содержит триггер и структуры, реализующие выражения ![]() ,
, ![]() или преобразованные из них.
или преобразованные из них.
21. Устройство по п. 18, отличающееся тем, что расстояние ![]() от сторон зоны воздействия элемента перемещения во внутрь до сторон датчиков сигналов В1, В2, обращенных к оси симметрии элемента перемещений, меньше, чем расстояние
от сторон зоны воздействия элемента перемещения во внутрь до сторон датчиков сигналов В1, В2, обращенных к оси симметрии элемента перемещений, меньше, чем расстояние ![]() от этих же сторон зоны воздействия до датчика сигнала В3
от этих же сторон зоны воздействия до датчика сигнала В3 ![]() , а логический блок содержит триггер и структуры, реализующие выражения
, а логический блок содержит триггер и структуры, реализующие выражения ![]() ,
, ![]() или преобразованные из них.
или преобразованные из них.
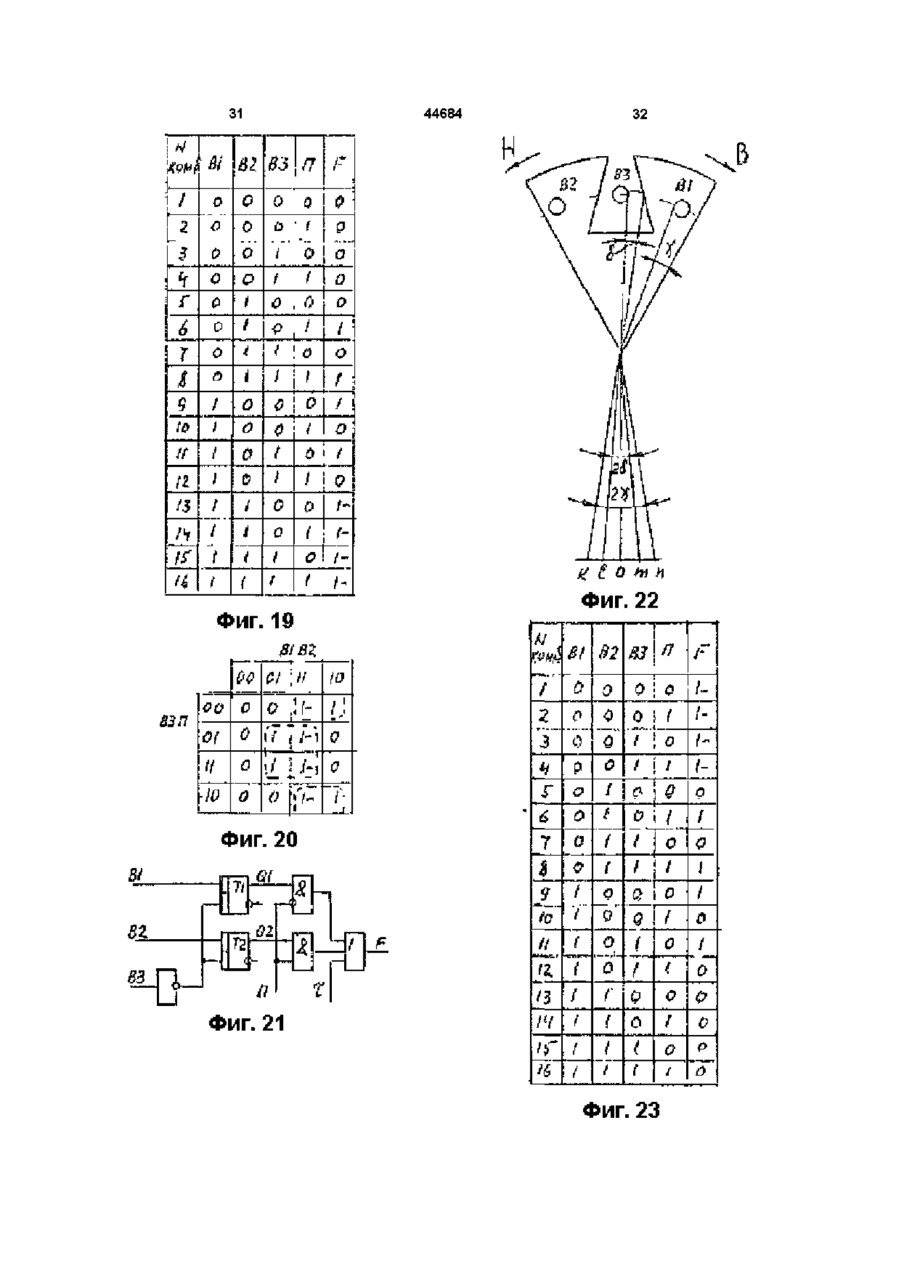
22. Устройство по п. 18, отличающееся тем, что расстояние ![]() от сторон зоны воздействия во вне, до датчиков сигналов В1, В2 меньше, чем расстояние
от сторон зоны воздействия во вне, до датчиков сигналов В1, В2 меньше, чем расстояние ![]() от этих же сторон до датчика сигнала В3
от этих же сторон до датчика сигнала В3 ![]() , а логический блок содержит триггер и структуры, реализующие выражения
, а логический блок содержит триггер и структуры, реализующие выражения ![]()
![]() или преобразованные из них.
или преобразованные из них.
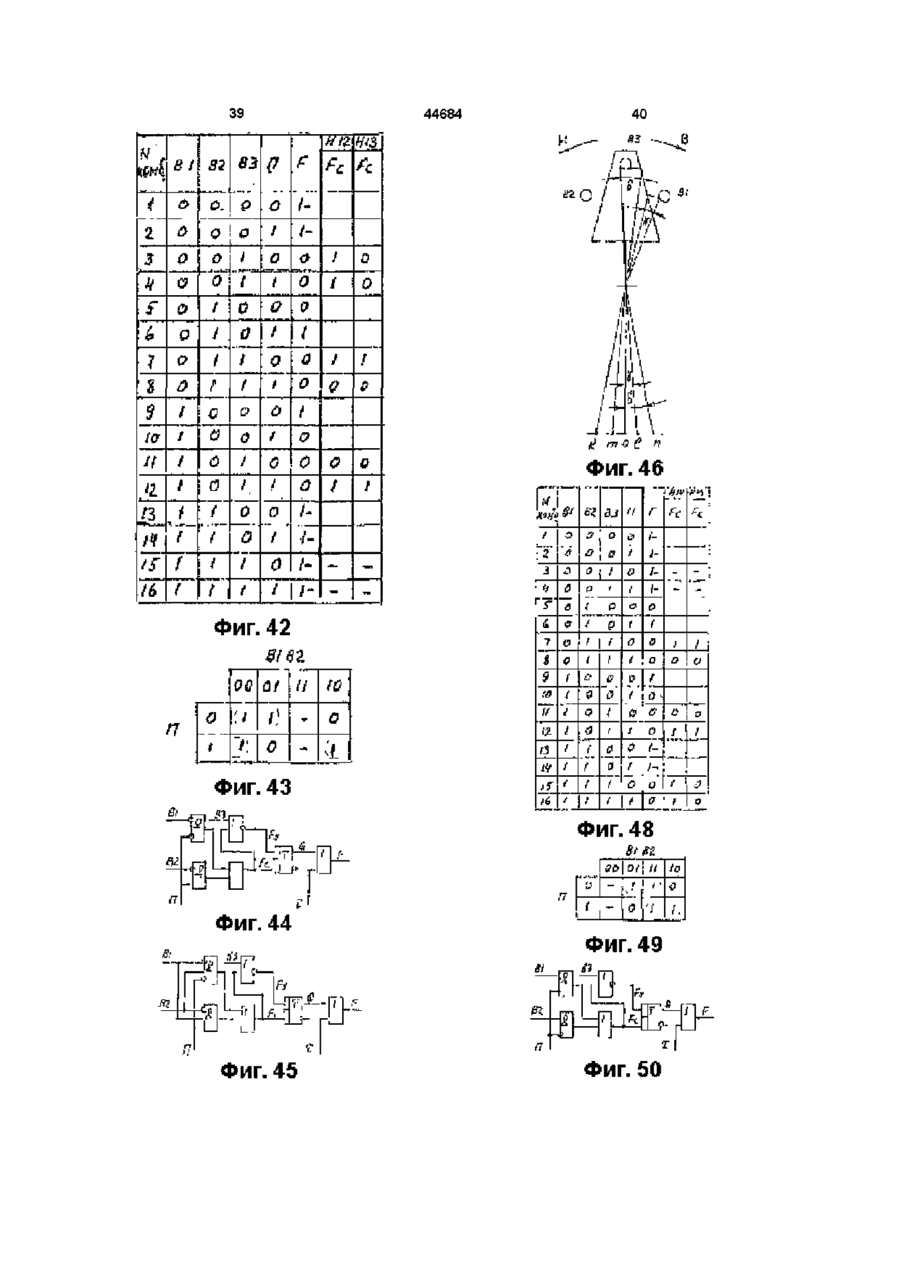
23. Устройство по п. 18, отличающееся тем, что расстояние ![]() от сторон зоны воздействия элемента перемещений во вне до датчиков сигналов В1, В2 больше, чем расстояние
от сторон зоны воздействия элемента перемещений во вне до датчиков сигналов В1, В2 больше, чем расстояние ![]() от этих же сторон зоны воздействия до датчика сигнала В3
от этих же сторон зоны воздействия до датчика сигнала В3 ![]() , а логический блок содержит триггеры и структуры, реализующие выражения
, а логический блок содержит триггеры и структуры, реализующие выражения ![]() Fy1=B1, Fy2=B2 или преобразованные из них.
Fy1=B1, Fy2=B2 или преобразованные из них.
24. Устройство по п. 18, отличающееся тем, что расстояние ![]() от сторон зоны воздействия во внутрь до сторон датчиков сигналов В1, В2, обращенных к оси симметрии элемента перемещений, больше, чем расстояние
от сторон зоны воздействия во внутрь до сторон датчиков сигналов В1, В2, обращенных к оси симметрии элемента перемещений, больше, чем расстояние ![]() от этих же сторон зоны воздействия до датчика сигналов В3
от этих же сторон зоны воздействия до датчика сигналов В3 ![]() , а логический блок содержит триггеры с инверсными входами и структуры, реализующие выражения
, а логический блок содержит триггеры с инверсными входами и структуры, реализующие выражения ![]() Fy1=B1, Fy2=B2 или преобразованные из них.
Fy1=B1, Fy2=B2 или преобразованные из них.
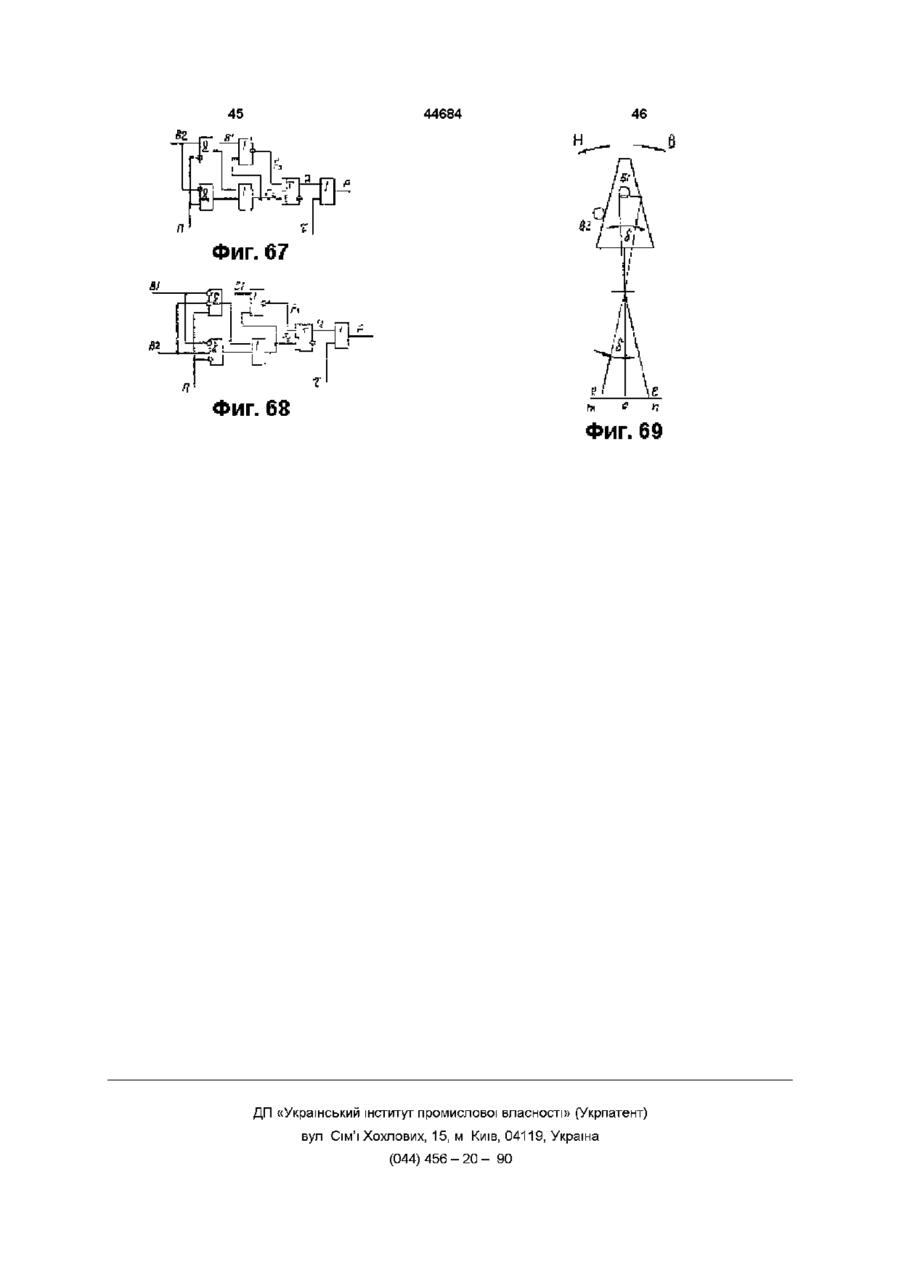
25. Устройство по п. 14, отличающееся тем, что при нейтральном положении элемента перемещений датчики сигналов В1, В2 расположены один под другим между боковыми сторонами зоны воздействия элемента перемещений, а датчик сигнала В3 – у боковой стороны, при этом каждый из датчиков В1, В2 равноудален от сторон зоны воздействия, и расстояние ![]() от боковой стороны зоны воздействия до противоположной ей стороны датчика сигнала В1 больше, чем расстояние
от боковой стороны зоны воздействия до противоположной ей стороны датчика сигнала В1 больше, чем расстояние ![]() от боковой стороны зоны воздействия до противоположной ей стороны датчика сигнала В2
от боковой стороны зоны воздействия до противоположной ей стороны датчика сигнала В2 ![]() а логический блок содержит триггер и структуры, реализующие выражения
а логический блок содержит триггер и структуры, реализующие выражения ![]() или преобразованные из них.
или преобразованные из них.
26. Устройство по п. 14, отличающееся тем, что при нейтральном положении элемента перемещений датчик сигнала В1 расположен между боковыми сторонами зоны воздействия элемента перемещений, а датчик сигнала В2 - у боковой стороны, при этом датчик сигнала В1 равноудален от сторон зоны воздействия, а логический блок содержит триггер и структуры, реализующие выражения ![]() ,
, ![]() или преобразованные из них.
или преобразованные из них.
27. Устройство по п. 14, отличающееся тем, что при нейтральном положении элемента перемещений датчик сигнала В1 расположен между боковыми сторонами зоны воздействия элемента перемещений, а датчик сигнала В2 - у боковой стороны, при этом датчик сигнала В1 равноудален от сторон зоны воздействия, а логический блок содержит триггер и структуры, реализующие выражения ![]() ,
, ![]() или преобразованные из них.
или преобразованные из них.
Текст
1 Устройство управления тележкой фронтальной дождевальной машины, содержащее систему механических звеньев, блок коммутации электродвигателя, блок защиты электродвигателя и преобразовательно - командное звено, связанное одним входом с выходом системы механических звеньев и другим входом - с переключателем направления движения дождевальной машины, а выходом - с входом блока коммутации электродвигателя, отличающееся тем, что преобразовательно - командное звено состоит из последовательно соединенных преобразователя заданных перемещений и логического блока, который своим выходом сигнала F соединен с входом блока коммутации электродвигателя, а входами - с выходами переключателя направления движения дождевальной машины, блока защиты электродвигателя, преобразователя заданных перемещений, при этом в преобразователе заданных перемещений размещены подключаемые выходами к входам логического блока датчики сигналов с возможностью регулирования их положения и бесконтактного взаимодействия с элементом перемещений, соединенного с выходом системы механических звеньев, а логический блок содержит триггеры и совокупности логических элементов, которые представлены структурами, подключенными к выходам триггеров и реалиv зующими выражение F = F(T,B* w,I7), и f I,QI 7 ' структурами, подключенными своими выходами на установочные и сбрасывающие входы триггеров и реализующими, соответственно, выражения где г , Д , < 2 ; , / 7 - сигналы на выходах, соответственно, блока защиты электродвигателя, датчиков сигналов, триггеров, переключателя направления движения дождевальной машины и на входах логического блока, a Fy, и FCJ - сигналы с выходов структур, подключенных, соответственно, на установочных и сбрасывающих входах триггеров, и также 1=1,2 j=1,2 порядковые числа 2 Устройство по п 1, отличающееся тем, что в преобразователе заданных перемещений элемент перемещений имеет две зоны воздействия на датчики сигналов, каждая из которых относительно оси симметрии элемента перемещений есть зеркальное отражение другой 3 Устройство по п 2, отличающееся тем, что в преобразователе заданных перемещений элемент перемещений выполнен в виде металлической фигурной пластины с трапецеидальным вырезом, ось симметрии которого совпадает с осью симметрии фигурной пластины 4 Устройство по п 2, отличающееся тем, что между внутренними сторонами зон воздействия элемента перемещений при нейтральном его положении расположен датчик сигнала ВЗ, а у внешних - датчики сигналов В1, В2, при этом датчик сигнала ВЗ равноудален на расстояние ^ от внутренних сторон зон воздействия, а датчики сигналов В1, В2 - на расстояние У от внешних 5 Устройство по п 4, отличающееся тем, что расстояние у удаления датчиков сигналов В1, В2 во вне зон воздействия элемента перемещений меньше расстояния ^ удаления датчика сигнала ВЗ у < S , а логический блок представлен триггером и структурами, реализующими выражения F =O+T Fr=Bin + B2lJ,F=B3Fr или преобразованные из них 6 Устройство по п 4, отличающееся тем, что расстояние У во вне зон воздействия элемента О 00 (О 44684 перемещений меньше & у д, а логический блок содержит триггеры с инверсными входами и структуры, реализующие выражения T,Fyl=BlFy2=B2,Fcl=FC2 или преобразованные из них 11 Устройство по п 2, отличающееся тем, что между внутренними сторонами зон воздействия элемента перемещений, при нейтральном его положении, расположены один под другим датчики сигналов В1, В2 и у внешней стороны - датчик сигнала ВЗ, при этом каждый из датчиков сигналов В1, В2 равноудален от внутренних сторон зон воздействия, но датчик сигнала В2 - удален меньше, а логический блок содержит триггер и структуры, реализующие выражения F = QB3I7 + QB3l7 + T,Fy=Bl,Fc=B2, или преобразованные из них Fc = B2IJ + В217,Fy =B\FC или преобразо ванные из них 13 Устройство по п 2, отличающееся тем, что между внутренними сторонами зон воздействия элемента перемещений при нейтральном положении размещен датчик сигнала В1 и у внешней датчик сигнала В2, при этом датчик сигнала В1 равноудален от внутренних сторон зон воздействия, а логический блок содержит триггер и структуры, реализующие выражения F = Q +T Fc =B\B2n + B\B2n,Fy =BlFc или преоб разованные из них 14 Устройство по п 1, отличающееся тем, что в преобразователе заданных перемещений элемент перемещений имеет одну симметричную зону воздействия 15 Устройство по п 14, отличающееся тем, что в преобразователе заданных перемещений элемент перемещений есть металлическая фигурная пластина 16 Устройство по п 14 отличающееся тем, что при нейтральном положении элемента перемещений зона воздействия расположена напротив двух датчиков сигналов, каждый из которых равноудален от своей боковой стороны зоны воздействия к оси симметрии ее, а логический блок содержит триггер и структуры, реализующие выражения Fy1=Bi, Fy2=B2 или преобразованные из них 10 Устройство по п 4, отличающееся тем, что F = QlI7 + Q2l7 + 12 Устройство по п 2, отличающееся тем, что между внутренними сторонами зон воздействия элемента перемещений, при нейтральном положении, размещен датчик сигнала В1 и у внешней датчик сигнала В2, при этом датчик сигнала В1 равноудален от внутренних сторон зон воздействия, а логический блок содержит триггер и структуры, реализующие выражения F = Q +T или преобразованные из них 17 Устройство по п 14, отличающееся тем, что при нейтральном положении элемента перемещений зона воздействия расположена напротив двух датчиков сигналов, каждый из которых равноудален от своей боковой стороны зоны воздействия к оси симметрии ее, а логический блок содержит триггер и структуры, реализующие выражения =BIB2+Fr и л и с преобразованные из них 18 Устройство по п 14, отличающееся тем, что при нейтральном положении элемента перемещений датчик сигнала ВЗ расположен между боковыми сторонами зоны воздействия и датчики сигналов В1, В2 возле них, при этом датчик сигнала ВЗ равноудален от обеих сторон на расстояние ^ , и датчики сигналов В1, В2 равноудалены каждый от своей стороны зоны воздействия на расстояние У 19 Устройство по п 18, отличающееся тем, что расстояние У от сторон зоны воздействия во вне до датчиков сигналов В1, В2 меньше, чем рас 44684 стояние и от этих же сторон до датчика сигнала ВЗ / , а логический блок содержит триггер и структуры, реализующие выражения F = Q + T, Fc =Bin + B2TT,Fy =B3+FC или преобразованные из них 20 Устройство по п 18, отличающееся тем, что расстояние У от сторон зоны воздействия во вне до датчиков сигналов В1, В2 меньше, чем расстояние ^ от этих же сторон до датчика сигнала ВЗ у £ ? 2 ' а логический блок содержит триггер и структуры, реализующие выражения F = QB3l7 + QB3I7 + T,Fy =B1,FC = В2 или преобразованные из них 26 Устройство по п 14, отличающееся тем, что при нейтральном положении элемента перемещений датчик сигнала В1 расположен между боковыми сторонами зоны воздействия элемента перемещений, а датчик сигнала В2 - у боковой стороны, при этом датчик сигнала В1 равноудален от сторон зоны воздействия, а логический блок содержит триггер и структуры, реализующие выражения F = Q +T Fr =B2n+B2TT,Fv с У =B1+Fr с или преобразованные из них 27 Устройство по п 14, отличающееся тем, что при нейтральном положении элемента перемещений датчик сигнала В1 расположен между боковыми сторонами зоны воздействия элемента перемещений, а датчик сигнала В2 - у боковой стороны, при этом датчик сигнала В1 равноудален от сторон зоны воздействия, а логический блок содержит триггер и структуры, реализующие выражения ~
ДивитисяДодаткова інформація
Автори англійськоюMelnykov Volodymyr Havrylovych
Автори російськоюМельников Владимир Гаврилович
МПК / Мітки
МПК: A01G 25/16
Мітки: візком, машини, керування, пристрій, фронтально, дощувальної
Код посилання
<a href="https://ua.patents.su/23-44684-pristrijj-keruvannya-vizkom-frontalno-doshhuvalno-mashini.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування візком фронтальної дощувальної машини</a>
Пристрій для управління електодвигуном візка багатоопорної фронтальної дощувальної машини
Номер патенту: 18723
Опубліковано: 25.12.1997
Автор: Мельников Володимир Гаврилович
МПК: A01G 25/09
Мітки: електодвигуном, машини, фронтально, пристрій, управління, візка, багатоопорної, дощувальної
Формула / Реферат:
Устройство управления электродвигателем тележки многоопорной фронтальной дождевальной машины, содержащее систему механических звеньев для передачи углового положения соседних с тележкой секций трубопровода, блоки коммутации и защиты электродвигателя тележки и систему преобразования, первый вход которой механически связан с выходом системы механических звеньев для передачи углового положения соседних с тележкой секций трубопровода, второй...
Пристрій підключення дощувальної машини до гідранту закритої зрошувальної мережі
Номер патенту: 5849
Опубліковано: 29.12.1994
Автори: Лоох Владімір Робертовіч, Волобой Володимир Іванович
МПК: A01G 25/02, A01G 25/09
Мітки: пристрій, зрошувальної, закритої, машини, мережі, підключення, дощувальної, гідранту
Формула / Реферат:
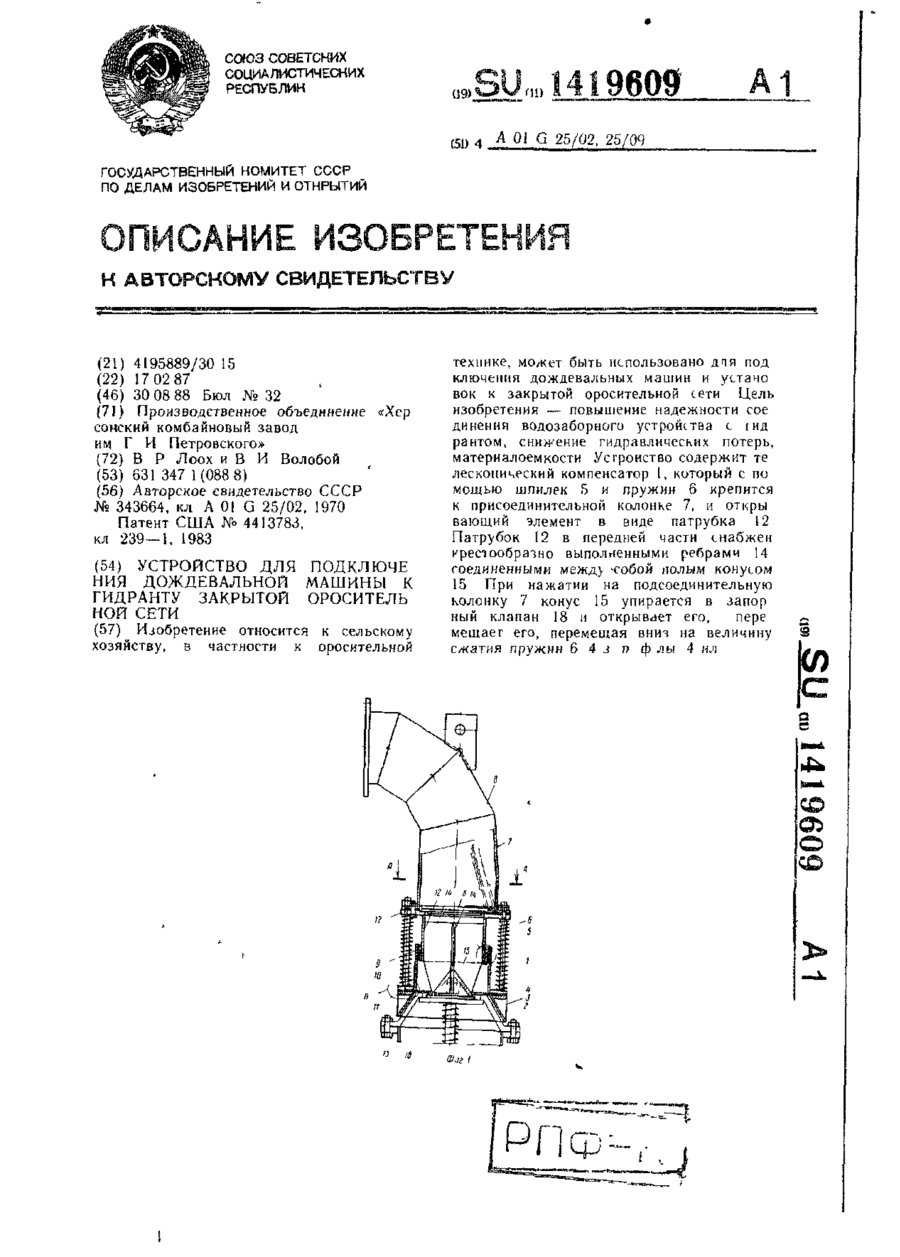
1. Устройство для подключения дождевальной машины к гидранту закрытой оросительной сети, включающее подсоединительную колонку с коленом, подпружиненный телескопический компенсатор с направляющим конусом, открывающий элемент, взаимодействующий с гидрантом, жестко связанный с подсоединительной колонкой, обратный клапан и уплотнение отличающееся тем, что, с целью повышения надежности, снижения гидравлических потерь, материалоемкости,...
Водозабірний пристрій дощувальної машини від гідрантів напорної мережі
Номер патенту: 5850
Опубліковано: 29.12.1994
Автори: Козачок Борис Дмитрович, Лямперт Геннадій Павлович, Волобой Володимир Іванович, Пацера Іван Павлович, Д'ячков Анатолій Костянтинович, Лоох Владімір Робертовіч, Василенко Віктор Пилипович, Назаров Владімір Філипповіч, Митрофанов Олександр Петрович
МПК: A01G 25/09
Мітки: дощувальної, водозабірний, пристрій, гідрантів, машини, напорної, мережі
Формула / Реферат:
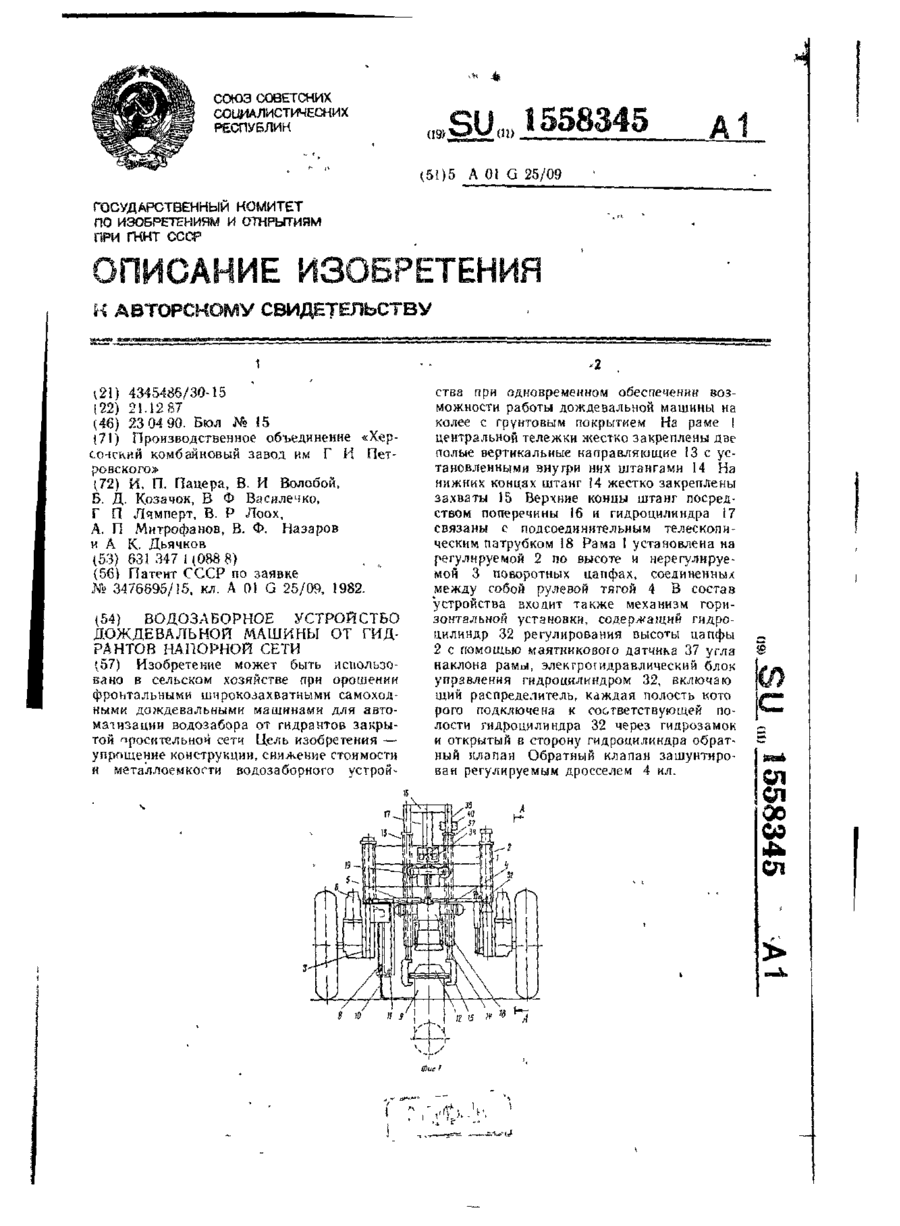
Водозаборное устройство дождевальной машины от гидрантов напорной сети, включающее установленные на раме машины две палые цилиндрические вертикальные направляющие, две подвижные штанги, установленные внутри направляющих и связанные нижними концами с захватами фланца гидранта, а верхними концами - с поперечной балкой с центральной опорой, связанной с корпусом гидроцилиндра присоединительного патрубка, выполненного телескопическим, причем...
Пристрій для керування стикозварювальної машини
Номер патенту: 341
Опубліковано: 30.04.1993
Автори: Андрієнко Федор Олександрович, Лазебний Іван Леонтійович, Кучук-Яценко Сергій Іванович, Лядов Володимир Васильович, Горишняков Олексій Іванович, Кривенко Валерій Георгійович
МПК: B23K 11/25, B23K 11/04
Мітки: пристрій, машини, керування, стикозварювальної
Формула / Реферат:
(57) Устройство для управления стыкосварочной машиной, содержащее подвижную и неподвижную станины, электрический привод перемещения подвижной станины, состоящий из соединенных параллельно электромашинного усилителя и двигателя постоянного тока, к двигателю постоянного тока подключен через редуктор следящий золотник, к которому подключены силовые гидравлические цилиндры, к последним присоединен привод осадки и подвижная станина, а также блок...
Пристрій цифрової індикації розташування сосуду шахтної підйомної машини
Номер патенту: 6069
Опубліковано: 29.12.1994
Автори: Матвієнко Микола Павлович, Марищенко Олександр Іванович
Мітки: сосуду, шахтної, індикації, розташування, підйомної, цифрової, машини, пристрій
Формула / Реферат:
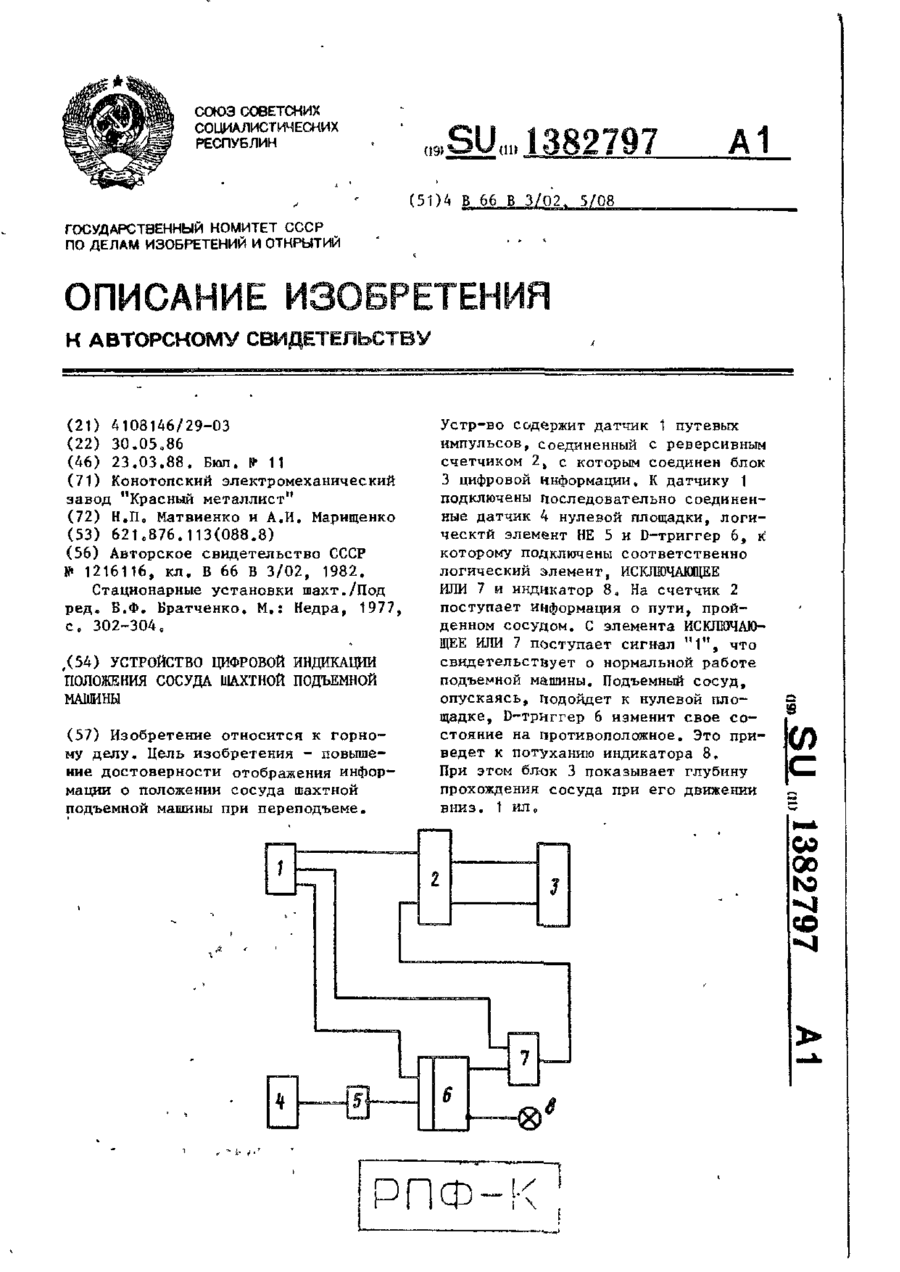
Устройство цифровой индикации положения сосуда шахтной подъемной машины, содержащее датчик путевых импульсов, выход которого соединен со счетным входом реверсивного счетчика, а также блок цифровой индикации, оба входа которого соединены с выходами реверсивного счетчика, отличающееся тем, что с целью повышения достоверности отображения информации о положении сосуда шахтной подъемной машины при переподь-еме, оно дополнительно снабжено...
Попередній патент: Очищувальний елемент, який розміщений на тримачі скребкового пристрою
Наступний патент: Багатокомпонентний лужний мийний засіб, що містить полімерну плівку, лужна мийна композиція та очисна система
Випадковий патент: Спосіб герметизації неспроможних анастомозів і посттравматичних зон порожніх органів травного тракту