Спосіб генерації інерційної сили














Формула / Реферат
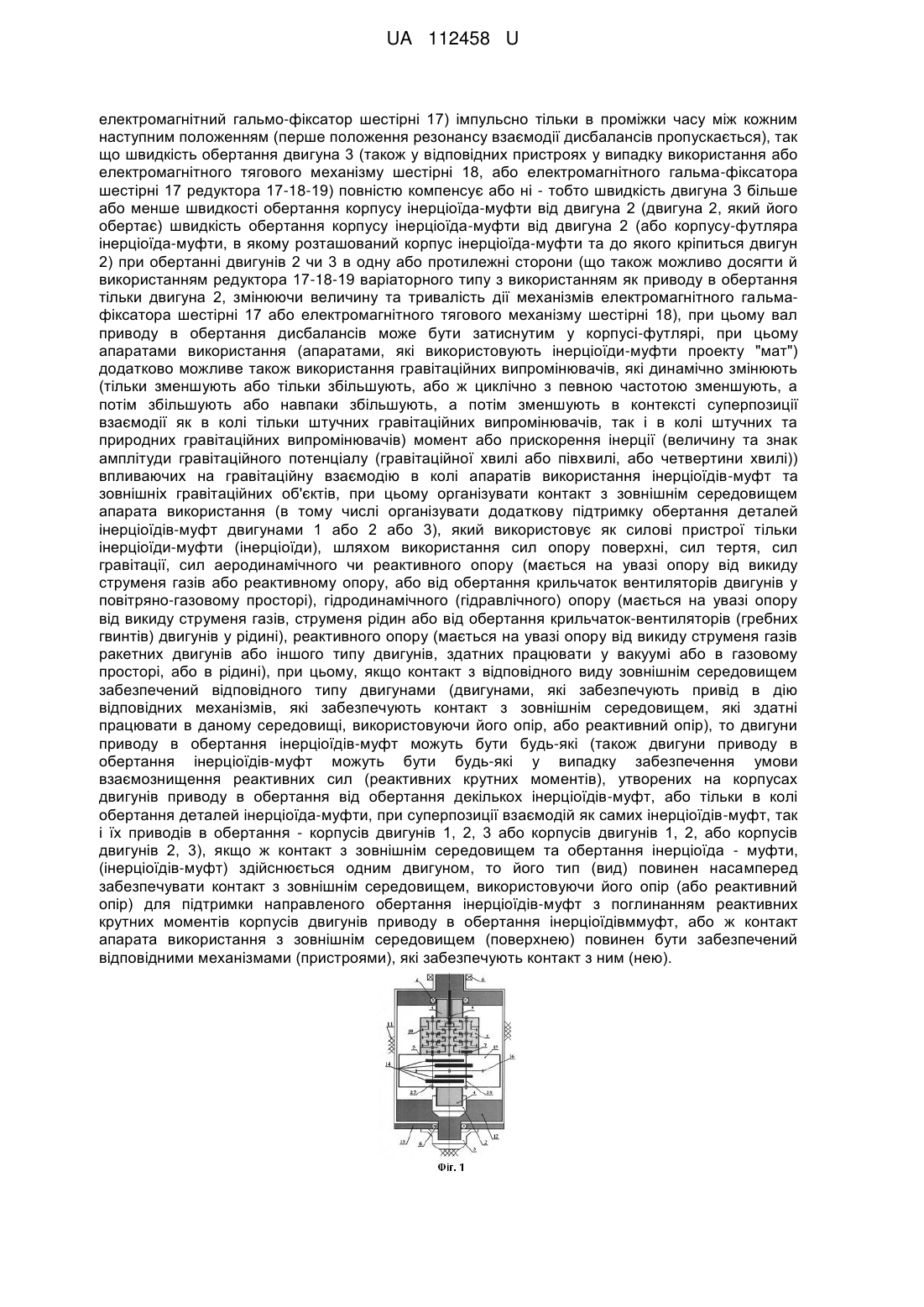
Спосіб генерації інерційної сили з використанням суперпозиції взаємодій дисбалансів самобалансних вібраторів (інерціоїдів-муфт проекту "мат"), дисбаланси яких обертаються на валах в корпусах, які також обертаються, при цьому забезпечується генерування в площині, перпендикулярній валам, на яких встановлені дисбаланси як строго направленої в одному напрямі дії інерційної сили або зміни її напрямку дії по спіралі зі зміною її параметрів та закручуванням в різні боки в контексті суперпозиції взаємодії сил як в колі тільки від інерціоїдів-муфт, так і в колі від інерціоїдів-муфт та сил від зовнішніх природних об'єктів з результуючим генеруванням тільки направленої сили або ж крутного моменту різнонаправлених відносно центру мас апарата використання сил від декількох інерціоїдів-муфт, який відрізняється тим, що суперпозиція взаємодій інерційних сил дисбалансів досягається не тільки обертанням дисбалансів інерціоїдів-муфт через редуктор від двигуна 1, але й обертанням від двигуна 2, по осі, паралельній валам, на яких встановлені дисбаланси, корпусів пристроїв інерціоїдів-муфт самобалансних вібраторів, в яких вони жорстко встановлені на валах та обертаються на підшипникових опорах, але й обертанням (можливим застосуванням обертання) від двигуна 3, по осі, паралельній валам, на яких встановлені дисбаланси, корпусів-футлярів, в яких встановлені корпуси інерціоїдів-муфт, при цьому загальне передаточне число всіх передач інерціоїда-муфти може бути довільним, в тому числі і рівним одиниці (тобто редуктори інерціоїдів - муфт складаються з мінімальної кількості шестерень - двох), що, при певній взаємодії (при суперпозиції взаємодії) двигунів 1, 2, 3 або роботі двигуна 2 при затиснутому валу приводу в обертання дисбалансів або при суперпозиції взаємодії двигунів 1, 2 або ж двигунів 2, 3 приводу в обертання деталей інерціоїдів-муфт, при затиснутому чи ні валу приводу в обертання дисбалансів, при довільному загальному передаточному числі всіх передач інерціоїдів-муфт, в тому числі і рівному одиниці, забезпечує генерування в площині, перпендикулярній валам, на яких обертаються дисбаланси як строго направленої в одному напрямі дії інерційної сили або зміни її напрямку дії по спіралі зі зміною її параметрів та закручуванням в різні боки при суперпозиції взаємодії сил як в колі тільки від інерціоїдів-муфт, так і в колі від інерціоїдів-муфт та сил від зовнішніх природних об'єктів з результуючим генеруванням тільки направленої сили або ж крутного моменту різнонаправлених відносно центру мас апарата використання сил від декількох інерціоїдів-муфт, при цьому генерування строго направленої в одному напрямі дії інерційної сили або зміни її напрямку дії по спіралі зі зміною її параметрів та закручуванням в різні боки можливо забезпечити, вмикаючи двигун 3 (також у відповідних пристроях електромагнітний тяговий механізм шестірні 18 або електромагнітний гальмо-фіксатор шестірні 17) імпульсно тільки в проміжки часу між кожним наступним положенням (перше положення резонансу взаємодії дисбалансів пропускається), так що швидкість обертання двигуна 3 (також у відповідних пристроях у випадку використання або електромагнітного тягового механізму шестірні 18, або електромагнітного гальма-фіксатора шестірні 17 редуктора 17-18-19) повністю компенсує або ні - тобто швидкість двигуна 3 більше або менше швидкості обертання корпусу інерціоїда-муфти від двигуна 2 (двигуна 2, який його обертає) швидкість обертання корпусу інерціоїда-муфти від двигуна 2 (або корпусу-футляра інерціоїда-муфти, в якому розташований корпус інерціоїда-муфти та до якого кріпиться двигун 2) при обертанні двигунів 2 чи 3 в одну або протилежні сторони (що також можливо досягти й використанням редуктора 17-18-19 варіаторного типу з використанням як приводу в обертання тільки двигуна 2, змінюючи величину та тривалість дії механізмів електромагнітного гальма-фіксатора шестірні 17 або електромагнітного тягового механізму шестірні 18), при цьому вал приводу в обертання дисбалансів може бути затиснутим у корпусі-футлярі, при цьому апаратами використання (апаратами, які використовують інерціоїди-муфти проекту "мат") додатково можливе також використання гравітаційних випромінювачів, які динамічно змінюють (тільки зменшують або тільки збільшують, або ж циклічно з певною частотою зменшують, а потім збільшують або навпаки збільшують, а потім зменшують в контексті суперпозиції взаємодії як в колі тільки штучних гравітаційних випромінювачів, так і в колі штучних та природних гравітаційних випромінювачів) момент або прискорення інерції (величину та знак амплітуди гравітаційного потенціалу (гравітаційної хвилі або півхвилі, або четвертини хвилі)) впливаючих на гравітаційну взаємодію в колі апаратів використання інерціоїдів-муфт та зовнішніх гравітаційних об'єктів, при цьому організувати контакт з зовнішнім середовищем апарата використання (в тому числі організувати додаткову підтримку обертання деталей інерціоїдів-муфт двигунами 1 або 2 або 3), який використовує як силові пристрої тільки інерціоїди-муфти (інерціоїди), шляхом використання сил опору поверхні, сил тертя, сил гравітації, сил аеродинамічного чи реактивного опору (мається на увазі опору від викиду струменя газів або реактивного опору, або від обертання крильчаток вентиляторів двигунів у повітряно-газовому просторі), гідродинамічного (гідравлічного) опору (мається на увазі опору від викиду струменя газів, струменя рідин або від обертання крильчаток-вентиляторів (гребних гвинтів) двигунів у рідині), реактивного опору (мається на увазі опору від викиду струменя газів ракетних двигунів або іншого типу двигунів, здатних працювати у вакуумі або в газовому просторі, або в рідині), при цьому, якщо контакт з відповідного виду зовнішнім середовищем забезпечений відповідного типу двигунами (двигунами, які забезпечують привід в дію відповідних механізмів, які забезпечують контакт з зовнішнім середовищем, які здатні працювати в даному середовищі, використовуючи його опір або реактивний опір), то двигуни приводу в обертання інерціоїдів-муфт можуть бути будь-які (також двигуни приводу в обертання інерціоїдів-муфт можуть бути будь-які у випадку забезпечення умови взаємознищення реактивних сил (реактивних крутних моментів), утворених на корпусах двигунів приводу в обертання від обертання декількох інерціоїдів-муфт, або тільки в колі обертання деталей інерціоїда-муфти, при суперпозиції взаємодій як самих інерціоїдів-муфт, так і їх приводів в обертання - корпусів двигунів 1, 2, 3 або корпусів двигунів 1, 2, або корпусів двигунів 2, 3), якщо ж контакт з зовнішнім середовищем та обертання інерціоїда-муфти, (інерціоїдів-муфт) здійснюється одним двигуном, то його тип (вид) повинен насамперед забезпечувати контакт з зовнішнім середовищем, використовуючи його опір (або реактивний опір) для підтримки направленого обертання інерціоїдів-муфт з поглинанням реактивних крутних моментів корпусів двигунів приводу в обертання інерціоїдів-муфт, або ж контакт апарата використання з зовнішнім середовищем (поверхнею) повинен бути забезпечений відповідними механізмами (пристроями), які забезпечують контакт з ним (нею).
Текст
Реферат: Спосіб генерації інерційної сили з використанням суперпозиції взаємодій дисбалансів самобалансних вібраторів (інерціоїдів-муфт проекту "мат"), дисбаланси яких обертаються на валах в корпусах, які також обертаються, при цьому забезпечується генерування в площині, перпендикулярній валам, на яких встановлені дисбаланси як строго направленої в одному напрямі дії інерційної сили або зміни її напрямку дії по спіралі зі зміною її параметрів та закручуванням в різні боки в контексті суперпозиції взаємодії сил як в колі тільки від інерціоїдівмуфт, так і в колі від інерціоїдів-муфт та сил від зовнішніх природних об'єктів з результуючим генеруванням тільки направленої сили або ж крутного моменту різнонаправлених відносно центру мас апарата використання сил від декількох інерціоїдів-муфт, причому суперпозиція взаємодій інерційних сил дисбалансів досягається не тільки обертанням дисбалансів інерціоїдів-муфт через редуктор від двигуна 1, але й обертанням від двигуна 2, по осі, паралельній валам, на яких встановлені дисбаланси, корпусів пристроїв інерціоїдів-муфт самобалансних вібраторів, в яких вони жорстко встановлені на валах та обертаються на підшипникових опорах, але й обертанням (можливим застосуванням обертання) від двигуна 3, по осі, паралельній валам, на яких встановлені дисбаланси, корпусів-футлярів, в яких встановлені корпуси інерціоїдів-муфт, при цьому загальне передаточне число всіх передач інерціоїда-муфти може бути довільним, в тому числі і рівним одиниці (тобто редуктори інерціоїдів-муфт складаються з мінімальної кількості шестерень - двох), що, при певній взаємодії (при суперпозиції взаємодії) двигунів 1, 2, 3 або роботі двигуна 2 при затиснутому валу приводу в обертання дисбалансів, або при суперпозиції взаємодії двигунів 1, 2 або ж двигунів 2, 3 приводу в обертання деталей інерціоїдів-муфт, при затиснутому чи ні валу приводу в обертання дисбалансів, при довільному загальному передаточному числі всіх передач інерціоїдів-муфт, в тому числі і рівному одиниці, забезпечує генерування в площині, перпендикулярній валам, на яких обертаються дисбаланси як строго направленої в одному напрямі дії інерційної сили або зміни її напрямку дії по спіралі зі зміною її параметрів та закручуванням в різні боки при суперпозиції взаємодії сил як в колі тільки від інерціоїдів-муфт, так і в колі від інерціоїдів-муфт та сил від зовнішніх природних об'єктів з результуючим генеруванням тільки направленої сили або ж крутного моменту різнонаправлених відносно центру мас апарата використання сил від декількох інерціоїдів-муфт, при цьому генерування строго направленої в одному напрямі дії інерційної сили або зміни її напрямку дії по спіралі зі зміною її параметрів та закручуванням в різні боки можливо забезпечити, вмикаючи двигун 3 (також у відповідних пристроях електромагнітний тяговий механізм шестірні 18, або UA 112458 U (54) СПОСІБ ГЕНЕРАЦІЇ ІНЕРЦІЙНОЇ СИЛИ UA 112458 U електромагнітний гальмо-фіксатор шестірні 17) імпульсно тільки в проміжки часу між кожним наступним положенням (перше положення резонансу взаємодії дисбалансів пропускається), так що швидкість обертання двигуна 3 (також у відповідних пристроях у випадку використання або електромагнітного тягового механізму шестірні 18, або електромагнітного гальма-фіксатора шестірні 17 редуктора 17-18-19) повністю компенсує або ні - тобто швидкість двигуна 3 більше або менше швидкості обертання корпусу інерціоїда-муфти від двигуна 2 (двигуна 2, який його обертає) швидкість обертання корпусу інерціоїда-муфти від двигуна 2 (або корпусу-футляра інерціоїда-муфти, в якому розташований корпус інерціоїда-муфти та до якого кріпиться двигун 2) при обертанні двигунів 2 чи 3 в одну або протилежні сторони (що також можливо досягти й використанням редуктора 17-18-19 варіаторного типу з використанням як приводу в обертання тільки двигуна 2, змінюючи величину та тривалість дії механізмів електромагнітного гальмафіксатора шестірні 17 або електромагнітного тягового механізму шестірні 18), при цьому вал приводу в обертання дисбалансів може бути затиснутим у корпусі-футлярі, при цьому апаратами використання (апаратами, які використовують інерціоїди-муфти проекту "мат") додатково можливе також використання гравітаційних випромінювачів, які динамічно змінюють (тільки зменшують або тільки збільшують, або ж циклічно з певною частотою зменшують, а потім збільшують або навпаки збільшують, а потім зменшують в контексті суперпозиції взаємодії як в колі тільки штучних гравітаційних випромінювачів, так і в колі штучних та природних гравітаційних випромінювачів) момент або прискорення інерції (величину та знак амплітуди гравітаційного потенціалу (гравітаційної хвилі або півхвилі, або четвертини хвилі)) впливаючих на гравітаційну взаємодію в колі апаратів використання інерціоїдів-муфт та зовнішніх гравітаційних об'єктів, при цьому організувати контакт з зовнішнім середовищем апарата використання (в тому числі організувати додаткову підтримку обертання деталей інерціоїдів-муфт двигунами 1 або 2 або 3), який використовує як силові пристрої тільки інерціоїди-муфти (інерціоїди), шляхом використання сил опору поверхні, сил тертя, сил гравітації, сил аеродинамічного чи реактивного опору (мається на увазі опору від викиду струменя газів або реактивному опору, або від обертання крильчаток вентиляторів двигунів у повітряно-газовому просторі), гідродинамічного (гідравлічного) опору (мається на увазі опору від викиду струменя газів, струменя рідин або від обертання крильчаток-вентиляторів (гребних гвинтів) двигунів у рідині), реактивного опору (мається на увазі опору від викиду струменя газів ракетних двигунів або іншого типу двигунів, здатних працювати у вакуумі або в газовому просторі, або в рідині), при цьому, якщо контакт з відповідного виду зовнішнім середовищем забезпечений відповідного типу двигунами (двигунами, які забезпечують привід в дію відповідних механізмів, які забезпечують контакт з зовнішнім середовищем, які здатні працювати в даному середовищі, використовуючи його опір, або реактивний опір), то двигуни приводу в обертання інерціоїдів-муфт можуть бути будь-які (також двигуни приводу в обертання інерціоїдів-муфт можуть бути будь-які у випадку забезпечення умови взаємознищення реактивних сил (реактивних крутних моментів), утворених на корпусах двигунів приводу в обертання від обертання декількох інерціоїдів-муфт, або тільки в колі обертання деталей інерціоїда-муфти, при суперпозиції взаємодій як самих інерціоїдів-муфт, так і їх приводів в обертання - корпусів двигунів 1, 2, 3 або корпусів двигунів 1, 2, або корпусів двигунів 2, 3), якщо ж контакт з зовнішнім середовищем та обертання інерціоїда - муфти, (інерціоїдів-муфт) здійснюється одним двигуном, то його тип (вид) повинен насамперед забезпечувати контакт з зовнішнім середовищем, використовуючи його опір (або реактивний опір) для підтримки направленого обертання інерціоїдів-муфт з поглинанням реактивних крутних моментів корпусів двигунів приводу в обертання інерціоїдівммуфт, або ж контакт апарата використання з зовнішнім середовищем (поверхнею) повинен бути забезпечений відповідними механізмами (пристроями), які забезпечують контакт з ним (нею). UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до способу маніпулювання масами, які направлено в просторі та в часі змінюють (збільшують а потім зменшують або навпаки) з певною динамікою свій результуючий момент або прискорення інерції, в тому числі і при обертальному русі, завдяки чому в приладах певної конструкції - пристроях муфт проекту "55" ("мат") створюється штучна відцентрова, інерційна - рушійна сила. Даний спосіб та прилади для генерування відцентрових імпульсів інерції в певний час та в певному секторі обертання приладу, застосовуються на пристроях для штучного створення рушійної сили з подальшою силовою взаємодією з навколишнім середовищем та пересуванням в просторі. Генерація рушійної сили досягається обертанням по колу та створенням імпульсу інерції від відцентрової сили в певний час та в певному секторі дуги обертання самої періодично переміщуваної маси. Штучно генеровані з певною частотою в часі, величиною та напрямом в просторі відцентрові імпульси інерції, величина яких залежить від маси дисбалансів, швидкості та радіуса їх обертання, швидкості та напряму обертання корпусу, в якому вони жорстко встановлені та обертаються, виду (по колу чи реверсивного коливання) обертання корпусу, напрямку генерованої в просторі сили (суперпозиції та резонансу взаємодій як тільки між штучними гравітаційними випромінювачами, так і штучними гравітаційними випромінювачами та природними (природними гравітаційними об'єктами), з окремим або комбінованим приводом обертання гравітаційних випромінювачів від двигунів будь-якого типу, можуть застосовуватися на пристроях для переміщення в просторі, в тому числі і з малими величинами зовнішнього гравітаційного поля, генеруванні крутного моменту, що може застосовуватися в будь-якій галузі, де потрібно використання подібного типу сил, та на їх основі силових агрегатів. Існує такий аналог даного рішення - пристрій силової установки, описаний в патенті України на корисну модель № 43101, недоліком якої є небезпечність використання ядерних реакцій та недосконалість генераторів інерційних сил. Крім цього потрібно відмітити той факт, що використання такого типу пристроїв потребує наявності двигунів приводу в обертання з великим крутним моментом, тому й були використані самобалансні вібратори (пристрої на їх основі інерціоїди "Шаберуга", муфти проектів "22", "55"), при обертанні корпусів самобалансних вібраторів відбувається взаємознищування сил та їх крутних моментів, що позитивно впливає на потужність двигунів приводу в обертання дисбалансів, та забезпечує генерацію відцентрової сили інерції тільки в певному напрямі. Тому іншим аналогом є спосіб роботи інерційних вібраторів (див. стор. 180-182 книга Гобермана Л.А. "Основы теории, расчета и проэктирования строительных и дорожных машин"). Самобалансний вібратор див також фіг. 28 додатку креслень - це вібратор, який складається з двох симетрично розташованих на валах 27, 28 дисбалансів 14 фіг. 1 - фіг. 22 додатку креслень, які жорстко розташовані на цих валах та обертаються з ними в нерухомому корпусі 5 та внаслідок суперпозиції або резонансу взаємодій генерують відцентрові імпульси інерції в одній площині, та які направлені під кутом 180°. Недоліком описуваних в даній книзі способів є неможливість генерувати самобалансними вібраторами направлених імпульсів відцентрової сили інерції під кутами, які не дорівнюють 180° (що забезпечується завдяки саме обертанню корпусу 5 (фіг. 1 - фіг. 22, фіг. 35 додатку креслень) в якому жорстко на підшипниках симетрично встановлені та обертаються дисбаланси 14. Іншим аналогом є заявка на патент України а201013528. Головним недоліком описуваних в даній заявці механізмів є проблема, суть якої в тому, що при обертанні дисбалансів 14 в корпусі 5, що обертається, двигуну приводу в обертання пристроїв доводиться переборювати момент інерції, який виникає при обертанні дисбалансів 14 в корпусі 5, що обертається, до та особливо від його центру оскільки динамічно змінюється радіус обертання дисбалансів 14 відносно центру їх корпусу 5, що прямим чином впливає не тільки на потужність двигуна 1 приводу їх в обертання, але й в цілому на технологію роботи механізмів муфт проекту "55". Це властивість такого типу пристроїв є насправді негативним проявом їхньої роботи, тому при їхньому проектуванні й експлуатації потрібно обов'язково передбачати комплекс мір, головне завдання яких забезпечити якісну роботу інерціоїдів "Шаберуга" і їм подібних (використанням наприклад муфт проекту "22" див. заявку на патент України а201402848) та див. авторські роботі Троценка П.Д. за 2008-2014 рр. Виходячи з чого в основу корисної моделі поставлено задачу створення ефективних способів та технологій, а на основі них пристроїв для генерування сил, з ефективним практичним використанням відцентрової сили інерції, а також резонансу та суперпозиції взаємодій як в колі тільки штучних джерел відцентрової сили інерції, так і в колі штучних джерел гравітаційного випромінювання та природних гравітаційних об'єктів (див. також міжнародні заявки РСТ WO2009/130545, WO2009/150552). Крім цього також поставлено завдання ліквідувати недоліки роботи аналогічних пристроїв, описаних в заявці на патент України а201013528, а саме зменшити силу затрачуваного крутного моменту двигуна привода в 1 UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 обертання пристроїв муфт при обертанні дисбалансів в обертаючому корпусі при їх обертанні до та від центру корпусу 5. Поставлена задача може бути виконана як шляхом проектування нового типу пристроївмуфт проекту "55", так і зміни їх технології роботи. Зменшити такий негатив (саме зменшити негатив - силу затрачуваного крутного моменту двигуна привода в обертання пристроїв муфт проекту "55" при обертанні дисбалансів 14 (див. фіг. 1 - фіг. 22 додатку креслень) в обертаючому корпусі 5) можливо декількома способами: обмежити технічні характеристики даного типу пристроїв див. також фіг. 1 - фіг. 22 додатку креслень; обмежити швидкість обертання корпусів 5 пристроїв (див. фіг. 1 - фіг. 22 додатку креслень), корпусів 5 та дисбалансів 14 пристроїв. Змінити технологію роботи пристроїв: 1.2.1 Окремо змінювати швидкості обертання дисбалансів 14 і корпусу 5 (див. фіг. 1 - фіг. 22 додатку креслень), у якому вони встановлені та обертаються в контексті суперпозиції взаємодій. 1.2.2 Застосовувати реверсивні коливання дисбалансів 14 або корпусу5 (що набагато вигідніше) в якому вони встановлені та обертаються (див. фіг. 1 - фіг. 22 додатку креслень) в контексті суперпозиції взаємодій. Обмежити величину мас, ексцентриситетів дисбалансів 14. Використовувати спеціальні додаткові пристрої як джерела моментів інерції: 2.1. Використовувати інерцію корпусу 5 й деталей (зокрема балансу 7 передачі від вала привода в обертання до валів, на яких розташовані дисбаланси, інших передач) пристроїв, див. також мал.1 додатку креслень. 2.2. Використовувати як додаткове встаткування - інерцію маховикового накопичувача (маховика) 7.1, який доцільніше встановлювати на валу двигуна приводу в обертання дисбалансів 14 пристроїв (див. фіг. 4 додатку креслень). При цьому звісно, що при затиснутому - нерухомому валу 9 приводу в обертання дисбалансів 14 пристроїв-муфт маховик 7.1 може бути встановлений на валу приводу в обертання корпусів 5 пристроїв-муфт проекту "55" (хоча перспективно використовувати маховик 7.1 саме тільки на валу 9 приводу в обертання дисбалансів), при цьому концентратором моменту інерції також можуть служити і корпус 5 і деталі (шестерні, баланс 7 передачі, які можуть бути використані як маховикові накопичувачі інерційної енергії) пристроїв-муфт проекту "55". Небажане використання маховиків 7.1 на реверсивно діючих механізмах. Саме використання махового крутного моменту дасть можливість стабілізувати роботу приводу в обертання дисбалансів 14 даного та аналогічного типу пристроїв-муфт проекту "55" (хоча вони можуть працювати і без пристроїв для накопичення махового крутного моменту), саме з точки зору змінюваного в часі потрібного крутного моменту від джерела приводу в обертання, що може бути забезпечено саме малою частотою обертання корпусів 5 інерціоїдів-муфт проекту "55". 2.3. Використовувати як додаткове устаткування обгінні муфти, електромуфти, не тільки двигуни приводу в обертання, які генерують спрямований крутний момент, але й двигуни приводу в обертання крокові, сервомотори, що генерують, односпрямовані або реверсивні коливання крутного моменту. Поставлена задача вирішується як шляхом проектування нового типу пристроїв-муфт проекту "55" на основі пристроїв типу "Шаберуга" та муфт проекту "22" (див. заявку на патент України а2014 02848, див. також авторські роботи Троценка П.Д. за 2008-2014 рр.: № 25254 від 06.08.2008 р., № 25396 від 20.08.2008 р., № 26041 від 13.10.2008 р., № 26739 від 01.12.2008 р., № 27796 від 24.02.2009 р., № 31250 від 04.12.2009 р., № 28877 від 25.05.2009 р., № 32498 від 23.03.2010 р., № 32501 від 23.03.2010 р., № 34203 від 21.07.2010 р., № 35497 від 28.10.2010 р., № 37592 від 24.03.2011 р., № 39211 від 18.07.2011 р., № 40305 від 07.10.2011 р., № 41622 від 03.01.2012 р., № 42813 від 19.03.2012 р., № 43615 від 07.05.2012 р., № 43830 від 17.05.2012 р., № 44385 від 19.06.2012 р., № 46161 від 29.10.2012 р., № 49798 від 21.06.2013 р., № 50425 від 24.07.2013 р., № 52478 від 09.12.2013 р., № 54142 від 19.03.2014 р., № 56823 від 12.08.2014 р., № 57914 від 29.12.2014 р. так і зміни їх технології роботи за рахунок застосування окремого приводу їх в обертання від двигунів з організацією їх роботи в контексті суперпозиції взаємодії, див. також додаток креслень. В основу було взято використання окремого приводу в обертання як самих дисбалансів 14 фіг. 1 - фіг. 22 додатку креслень, так і корпусів 5, в яких вони жорстко встановлені та обертаються на підшипниках, так і корпусів-футлярів 12, в яких встановлені корпуси 5 муфт з приводами їх в обертання від двигуна будь-якого типу див. мал.4 додатку креслень. Основу роботи пропонованих пристроїв-муфт проекту "55" становить спосіб генерації сили інерції з використанням суперпозиції взаємодій дисбалансів самобалансних вібраторів 2 UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 (інерціоїдів-муфт проекту "55"), корпуси яких як і дисбаланси (вали приводу в обертання яких можуть бути й затиснутими та нерухомими, а самі дисбаланси будь-якої конструкції) обертаються з певними швидкостями (частотами) від одного чи від окремого двигуна (тобто окремо від декількох двигунів) приводу в обертання будь-якого виду та типу безпосередньо від його (їх) вала, або через інші додаткові механізми (муфти, редуктори, роздаточні коробки тощо), який відрізняється тим що суперпозиція взаємодій інерційних сил дисбалансів досягається не тільки їх обертанням, але й обертанням корпусів пристроїв самобалансних вібраторів, в яких вони жорстко встановлені та обертаються на підшипникових опорах при цьому загальне передаточне число всіх передач інерціоїду може бути довільним, в тому числі і рівним одиниці, що дає змогу при певній взаємодії двигунів приводу в обертання організовувати генерування як строго направленої в одному напрямі дії інерційних сил, що забезпечить рух апарата використання по прямій (вмикаючи двигун 3 (або електромагнітний тяговий механізм шестірні 18 або електромагнітний гальмо-фіксатор шестірні 17) імпульсно тільки в проміжки часу між кожним наступним положенням (перше положення резонансу взаємодії дисбалансів 14 пропускається) резонансу взаємодії дисбалансів, які обертаються) так що швидкість обертання двигуна 3 (також у відповідних пристроях у випадку використання або електромагнітного тягового механізму шестірні 18 або електромагнітного гальма-фіксатора шестірні 17 редуктора 17-18-19) повністю компенсує (або ні - тобто швидкість двигуна 3 більше або менше швидкості обертання корпуса інерціоїда від двигуна 2 (двигуна 2, який його обертає) швидкість обертання корпусу інерціоїда від двигуна 2 (або корпусу-футляра інерціоїда, в якому розташований корпус інерціоїда та до якого кріпиться двигун 2) при обертанні двигунів 2 чи 3 в одну або протилежні сторони (що також можливо досягти й використанням редуктора 17-18-19 варіаторного типу з використанням як приводу в обертання тільки двигуна 2, змінюючи величину та тривалість дії механізмів електромагнітного гальма-фіксатора шестірні 17 або електромагнітного тягового механізму шестірні 18, при цьому вал приводу в обертання дисбалансів може бути затиснутим у корпусі-футлярі 12) та в кінцевому зміну кута вектора інерційної відцентрової сили при її переміщенні по колу, та в цілому даний спосіб забезпечить рух апарата використання по колу або по спіралі зі зміною її параметрів та закручуванням її в різні боки, або прямо в контексті суперпозиції взаємодій як в колі тільки штучних, так і штучних та природних джерел інерційних та гравітаційних сил, при цьому можливе використання гравітаційних випромінювачів, впливаючих на гравітаційну взаємодію в колі апаратів використання та зовнішніх гравітаційних об'єктів. Дуже важливо відзначити про те, що в пристроях інерціоїдів "Шаберуга" і їм подібних (наприклад муфт проекту "22" див. заявку на патент України а201402848) див. авторські роботі Троценка П.Д. за 2008-2014 рр. та описані в них пристрої, які загальною назвою названі в даній заявці інерціоїди-муфти проекту "55" ("Бальбек-варіант") при загальному передаточному числі всіх їх передач, не рівному одиниці Z 1 (або рівному одиниці Ζ = 1), організація колового переміщення по дузі дії вектора результуючої відцентрової сили інерції пристроїв забезпечується саме обертанням від двигуна 2 корпусів 5, див. фіг. 1 - фіг. 22 додатку креслень даних пристроїв. А чітко направлена дія відцентрової інерційної сили досягається використанням декількох двигунів приводу в окреме обертання як корпусів 5, так і дисбалансів 14 фіг. 1 - фіг. 22 додатку креслень (можливе також використання редуктора типу 17-18-19), при цьому саме двигун 2 приводу в обертання корпусу 5 муфт проекту "55" забезпечує реверсивні коливання типу вперед - назад на певний регульований кут. Крім того чітко направлена дія відцентрової інерційної сили досягається за рахунок компенсації двигуном 3 переміщення відцентрової сили по колу від дії - направленою обертання (а не реверсивних коливань) двигуна 2. Здійснювати привод в обертання даного типу пристроїв - інерціоїдів-муфт проекту "55" можливо як тільки за вал 9 приводу в обертання дисбалансів 14, так і безпосередньо за корпус 5. Отже, сам корпус 5 повинен обертатися напряму окремим спеціального типу двигуном 2 приводу (або через редуктор), а вал 9 приводу в обертання дисбалансів 14 може мати привод в обертання від двигуна 1, або може бути жорстко затиснутий в корпусі-футлярі 12, або ж тимчасово зафіксований окремим спеціального типу двигуном 1 приводу в обертання. Дуже важливо відмітити про те, що використання інерціоїдів призводить до швидких переміщень апаратів використання, що самим прямим чином впливає на всі механізми, оскільки значно зростають навантаження (перевантаження, ударні навантаження) на них. А це все призводить до збільшення конструкційних розмірів деталей та механізмів, а значить і їх маси в цілому. Тому і саме з метою зменшення таких негативів, одними з мір є використання способів зменшення величини інерційної та гравітаційної маси апаратів, які використовують такі пристрої особливо для переміщень в просторі літальних апаратів використання, про що описано в авторських роботах Троценка П.Д. за 2008-2014 рр., міжнародних заявках W0 2009 150552, W0 2009 3 UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 130545, заявці на патент р. Білорусь № 20091797 від 19.08.2008 р., заявці на патент р. Казахстан № 2009 2031 від 8.11.2009 р., заявці на патент Росії № 2009109614 від 16.02.2009 р., № 2010131183 від 26.07.2010 р. Важливо відмітити той факт, що вже редуктор 8 муфт проекту "55", який має велике передаточне число, відіграє роль інерційного накопичувача енергії, що може бути використано для задовільної роботи - обертання дисбалансів 14 (фіг. 1 - фіг. 22 додатку креслень) муфт проекту "55" замість маховика 7.1 фіг. 28 - фіг. 34 додатку креслень, особливо при великій швидкості обертання їх корпусів 5 муфт або дисбалансів 14 фіг. 1 - фіг. 22 додатку креслень. А використання пристроїв фіг. 1 - фіг. 22 додатку креслень контексті з фіг. 35, в тому числі і при застосуванні малої швидкості обертання двигунів 2 приводу в обертання корпусів 5 муфт проекту "55", дає можливість значно зменшити потужність двигунів (особливо двигуна 1) приводу їх в обертання оскільки зменшується потрібний крутний момент двигуна (двигунів 1, 2) приводу в обертання при обертанні дисбалансів 14 від центру корпусу 5, а також забезпечити легке практичне здійснення генерації рушійної сили - відцентрової сили інерції в будь-якому потрібному - заданому в просторі напрямку та, в наслідок цього, ефективно забезпечити виконання будь-якого завдання. Реверсивна робота двигуна 3 може бути підтримана-підсилена використанням самоблокуючих муфт (див. авторські роботи Троценка П.Д. за 2012-2014 рр.). Ефективна робота двигунів 1,2 може бути забезпечена використанням обгінних муфт. На фіг. 1 фіг. 22 додатку креслень схематично представлені креслення конструкцій інерціоїдів-муфт проекту "55". На фіг. 1 додатку креслень (аналог - пристрої фіг. 2, фіг. 7, фіг. 14, фіг. 15 з варіаціями установки двигуна 2 та двигуна 3) показано пристрій інерціоїдів-муфт проекту "55", який складається з: 2 - двигуна приводу в обертання циліндричного корпусу 5 муфти, в залежності від поставлених конструкторських завдань, може бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати свої вали обертання, жорстко кріпиться до корпусу-футляра 12 пристрою; 3 - двигуна приводу в обертання корпусу-футляра 12 пристрою (всього пристрою муфти в зборі разом з двигунами 1 та 2 приводів в обертання вала приводу в обертання дисбалансів та корпусу муфт) див. фіг. 1 - фіг. 22 додатку креслень, в залежності від поставлених конструкторських завдань, можуть бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати вали обертання, жорстко кріпиться до корпусу 13; 4 - вал корпусу 5 муфти; 5 - циліндричний корпус інерціоїдів-муфт проекту "55" (аналог-пристрої типу "Шаберуга", муфти проекту "22" див. авторські роботи Троценка П.Д.); 6 - опорні підшипники кочення; 7 - баланси шестеренчастих передач 10, які також грають роль маховикових інерційних накопичувачів; 8 - редуктор інерціоїдів-муфт проекту "55", редуктори з передаточним числом рівним або не рівним одиниці, в залежності від кількості шестерень 8 можуть мати значне передаточне число, можуть або ні працювати як коробки передач; 9 - вал приводу в обертання дисбалансів 14 інерціоїдів-муфт проекту "55"; 10 - шестерні редуктора 8 інерціоїдів-муфт проекту "55"; 11 - корпус апарата використання; 12 - циліндричний корпус-футляр пристрою муфти; 13 - корпус апарата використання; 14 - дисбаланси, можуть бути будь-якого типу, форми, конструкції, в тому числі і такі як дисбаланси муфт проекту "22"; 15 - циліндричний корпус дисбалансів, може мати додаткові перегородки для забезпечення стійкості валів, на яких обертаються дисбаланси 14; 16 - шестеренчаста передача (передаточне число z=1) приводу в обертання валів, на яких жорстко розташовані та обертаються дисбаланси 14; 27, 28 - вали, на яких жорстко встановлені та обертаються дисбаланси 14, вали встановлені на підшипниках в циліндричному корпусі 5 інерціоїдів-муфт проекту "55". Корпуси 5 та 12 сконструйовані так, що забезпечують ефективне збирання та розбирання пристроїв інерціоїдів-муфт проекту "55". Принцип роботи пристрою наступний: протинаправлене обертання дисбалансів 14 забезпечується за рахунок приводу в обертання циліндричного корпусу 5 муфти від двигуна 2 та фіксації вала 9 приводу в обертання дисбалансів 14 в корпусі-футлярі 12 пристрою відносно корпусу 13. Внаслідок цього відбувається генерація з переміщенням по колу вектора відцентрових імпульсів інерції. При цьому обертання (направлене або реверсивні коливання типу вперед-назад) всього пристрою в зборі забезпечується двигуном 3. Що, в кінцевому результаті, і забезпечує генерацію рушійної сили - відцентрової сили інерції в контексті суперпозиції взаємодії. Також пристроєм фіг. 1 додатку креслень забезпечується генерація відцентрової сили інерції, вектор якої, в залежності від суперпозиції взаємодії двигунів 2 та 3 приводу в обертання, та обертанні одним двигуном 2 всього пристрою інерціоїда, переміщується або по колу обертання за рахунок направленого обертання двигуна 2 і в той же час простою двигуна 3 з жорсткою фіксацією його вала, або ж його сприянню, або ж діє в строго 4 UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 заданому напрямку за рахунок компенсації двигуном 3 кута переміщення вектора відцентрової сили по колу від дії двигуна 2. На фіг. 3 додатку креслень (аналог - пристрої фіг. 16, фіг. 18, фіг. 19, фіг. 20 з варіаціями установки двигуна 2 та використанням або електромагнітного гальма-фіксатора 30 шестірні 17 на валу 4, який забезпечує або прокручування-проковзування шестірні 17, або її обертання разом з корпусом 5 муфти; або електромагнітного тягового механізму 29, який встановлений на валу шестірні 18 та періодично переміщуючи її в зону або з зони зчеплення з шестернями 17 та 19, забезпечує або припинення або передачу крутного моменту від шестерні 17 до шестерні 19, забезпечуючи задане обертання корпусу-футляра 12) показано пристрій інерціоїдів-муфт проекту "55", який складається з: 2 - двигуна приводу в обертання циліндричного корпусу 5 муфти, в залежності від поставлених конструкторських завдань, може бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати свої вали обертання, жорстко кріпиться до корпусу-футляра 12 пристрою; 4 - вали корпусу 5 муфти; 5 - циліндричний корпус інерціоїдівмуфт проекту "55" (аналог-пристрої типу "Шаберуга", муфти проект)' "22"); 6 - опорні підшипники кочення; 7 - баланси шестеренчастих передач 10, які також грають роль маховикових інерційних накопичувачів; 8 - редуктор інерціоїдів-муфт проекту "55", редуктори з передаточним числом, рівним або не рівним одиниці, в залежності від кількості шестерень 8 можуть мати значне передаточне число, можуть або ні працювати як коробки передач; 9 - вал приводу в обертання дисбалансів 14 інерціоїдів "Шаберуга"; 10 - шестерні редуктора 8 інерціоїдів-муфт проекту "55"; 11 - корпус апарата використання; 12 - циліндричний корпус-футляр пристрою муфти; 13 корпус апарата використання; 14 - дисбаланси можуть бути будь-якого типу, форми, конструкції, в тому числі і такі як дисбаланси муфт проекту "22"; 15 - циліндричний корпус дисбалансів, може мати додаткові перегородки для забезпечення стійкості валів, на яких обертаються дисбаланси 14; 16 - шестеренчаста передача (передаточне число z=1) приводу в обертання валів, на яких жорстко розташовані та обертаються дисбаланси 14; 17 - шестірня редуктора корпусу 5 може мати електромагнітний гальмо-фіксатор 29 шестірні на валу 4, який забезпечує або її прокручування - проковзування, або обертання шестірні 17 разом з корпусом 5 муфти, забезпечуючи задане обертання корпусу-футлярі 12, що в кінцевому результаті, дає змогу замінити двигун 3, та генерувати відцентрову силу інерції, вектор якої або переміщується по колу при вільному прокручуванні шестірні 17, або діє в певному напрямі при певному спрацюванні гальма-фіксатора 29 та передачі крутного моменту від двигуна 2 та шестірні 17 через шестірню 18 до шестірні 19, що забезпечить поворот корпусу-футляра 12 без використання двигуна 3; 18 - шестірня редуктора корпусу 13, яка обертається на жорстко встановленому в корпусі 13 апарата використання вала, у пристроях фіг. 18 - фіг. 20 додатку креслень має електромагнітний тяговий механізм 29, який встановлений на валу шестірні 18 та періодично переміщуючи її в зону або з зони зчеплення з шестернями 17 та 19, забезпечує або припинення, або передачу крутного моменту від шестірні 17 до шестірні 19, забезпечуючи задане обертання корпусу-футляра 12, що, в кінцевому результаті, дає змогу генерувати відцентрову силу інерції, вектор якої переміщується або по колу при виході шестірні 18 з зони зчеплення з шестернями 17-19, або діє в певному напрямі при певному спрацюванні гальмафіксатора 29 та передачі крутного моменту від шестірні 17 до шестірні 19, яка повертає корпусфутляр 12 без використання двигуна 3; 19 - шестірня редуктора корпусу-футлярі 12, яка являє собою диск, всередині якого знаходиться вал 4 з шестеренчастим зчепленням шестерень 17-18, з зубцями зі сторони його середини (на внутрішньому кільці) з сторони зчеплення з шестірнею 18; 27, 28 - вали, на яких жорстко встановлені та обертаються дисбаланси 14, вали встановлені на підшипниках в циліндричному корпусі 5 інерціоїдів-муфт проекту "55"; 29 - електромагнітний тяговий механізм 29, який встановлений на валу шестірні 18 та періодично переміщуючи її в зону або з зони зчеплення з шестернями 17 та 19, забезпечує або припинення або передачу крутного моменту від шестірні 17 до шестірні 19, забезпечуючи задане обертання корпусуфутляра 12; 30 - електромагнітний гальмо-фіксатор, встановлюється на валу 4 в ступиці шестірні 17, забезпечує періодичне або прокручування-проковзування шестірні 17, або її обертання разом з корпусом 5 муфти. Шестерні 17, 18, 19 можуть бути варіаторного типу або циліндричні зубчасті, або конічні зубчасті, або конічні із гладкою поверхнею, яка покрита абразивним матеріалом. Корпуси 5 та 12 сконструйовані так, що забезпечують ефективне збирання та розбирання пристроїв інерціоїдів-муфт проекту "55". Принцип роботи пристрою наступний: протинаправлене обертання дисбалансів 14 забезпечується за рахунок приводу в обертання циліндричного корпусу 5 муфти від двигуна 2 та фіксації валу 9 приводу в обертання дисбалансів 14 в корпусі-футлярі 12 пристрою. При цьому обертання (направлене або реверсивні коливання типу вперед-назад) всього пристрою в 5 UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 зборі забезпечується використанням редуктора на основі шестерень 17, 18, 19, відповідної роботи двигуна 2 в сукупності з або роботою електромагнітного тягового механізму 29, або гальма-фіксатора 30. При наявності в редукторі 17-18-19 тільки електромагнітного тягового механізму 29, шестірня 18 періодично входить або виходить з зони зчеплення з шестернями 17 та 19, передаючи або ні в певний час крутний момент від двигуна 2 до корпусу-футляра 12, заміняючи роботу двигуна 3, що, в кінцевому результаті, і забезпечує генерацію рушійної силивідцентрової сили інерції в контексті суперпозиції взаємодії, вектор якої, в залежності від суперпозиції взаємодії обертання від двигуна 2 та роботи шестеренчастого редуктора 17-18-19 приводу в обертання корпусу-футляра 12 аналогічно роботі двигуна 3, та використанні як приводу в обертання тільки одного будь-якого типу та виду двигуна 2, переміщується або по колу обертання або направлена по прямій, що дає можливість забезпечити рух апаратів використання або по спіралі (керовано змінювати параметри траєкторії спіралі), або по прямій. Робота двигуна 2 та електромагнітного тягового механізму 29, як і положення обертання корпуса5, корпуса-футляра 12 та положення дисбалансів 14 керується відповідною автоматикою керування. В іншому випадку - при відсутності електромагнітного тягового механізму 29 на валу шестірні 18 та наявності в редукторі 17-18-19 тільки електромагнітного гальма-фіксатора 30 шестірні 17 на валу корпусу муфти 4, який забезпечує в певний момент або прокручуванняпроковзування шестірні 17, або її обертання разом з корпусом 5 муфти, що забезпечує періодичне повертання корпусу-футляра 12, при цьому періодична робота електромагнітного гальма-фіксатора 30 в сукупності з обертанням двигуна 2 забезпечує генерацію рушійної силивідцентрової сили інерції в контексті суперпозиції взаємодії, вектор якої, в залежності від суперпозиції взаємодії двигунів 2 та редуктора 17-18-19 приводу в обертання корпусу-футляра 12 аналогічно роботі двигуна 3, та обертанні одним будь-якого типу та виду двигуном 2 всього пристрою інерціоїда, переміщується або по колу обертання, або направлена по прямій, що дає можливість, використовуючи тільки двигун 2, забезпечити рух апаратів використання по спіралі (керовано змінювати параметри траєкторії спіралі), або рухатися по прямій. В цьому випадку робота двигуна 2 та електромагнітного гальма-фіксатора 30 шестірні 17, як і положення обертання корпусу 5, корпусу-футляра 12 та положення дисбалансів 14 керується відповідною автоматикою керування. Важливо відмітити про те, що редуктор 17-18-19 може бути і варіаторного типу. У випадку затиснутого вала 9 приводу в обертання дисбалансів 14 та використання звичайного двигуна 2, або 3 приводу в обертання корпусів 12 та 13 редуктор 17-18-19 обов'язково повинен мати електромагнітний гальмо-фіксатор 30 шестірні 17 на валу 4 або електромагнітний тяговий механізм 29 шестірні 18. А у випадку використання як двигунів 2 та 3 крокових двигунів, та окремого приводу в обертання валу 9 приводу в обертання дисбалансів 14, редуктор 17-18-19 може не мати ні електромагнітного тягового механізму 29 шестерні 18, ані електромагнітного гальма-фіксатора 30 шестірні 17. На фіг. 4 додатку креслень (аналог - пристрої фіг. 9, фіг. 10, фіг. 11, фіг. 17) показано пристрій інерціоїдів-муфт проекту "55" "Бальбек-варіант", який складається з: 1 - двигун приводу в обертання вала 9 приводу в обертання дисбалансів 14, в залежності від поставлених конструкторських завдань, може бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати вали обертання; 2 - двигун приводу в обертання циліндричного корпусу 5 муфти, в залежності від поставлених конструкторських завдань, може бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати свої вали обертання, жорстко кріпиться до корпусу-футляра 12 пристрою; 3 - двигун приводу в обертання корпусу-футляра 12 пристрою (всього пристрою мути в зборі разом з двигунами 1 та 2 приводів в обертання валу приводу в обертання дисбалансів та корпусу муфт) див. фіг. 1 - фіг. 22 додатку креслень, в залежності від поставлених конструкторських завдань, можуть бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати вали обертання, жорстко кріпиться до корпусу 13; 4 - вал корпусу 5 муфти; 5 - циліндричний корпус інерціоїдів-муфт проекту "55" (аналог-пристрої типу "Шаберуга", муфти проекту "22"); 6 - опорні підшипники кочення; 7 - баланси шестеренчастих передач 10, які також грають роль маховикових інерційних накопичувачів; 8- редуктор інерціоїдів-муфт проекту "55", редуктори з передаточним числом, рівним або не рівним одиниці, в залежності від кількості шестерень 8 можуть мати значне передаточне число, можуть або ні працювати як коробки передач; 9 - вал приводу в обертання дисбалансів 14 інерціоїдів-муфт 6 UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 проекту "55"; 10 - шестерні редуктора 8 інерціоїдів-муфт проекту "55"; 11 - корпус апарата використання; 12 - циліндричний корпус-футляр пристрою муфти; 13 - корпус апарата використання; 14 - дисбаланси, можуть бути будь-якого типу, форми, конструкції, в тому числі і такі як дисбаланси муфт проекту "22"; 15 - циліндричний корпус дисбалансів, може мати додаткові перегородки для забезпечення стійкості валів, на яких обертаються дисбаланси 14; 16 - шестеренчаста передача (передаточне число z=1) приводу в обертання валів, на яких жорстко розташовані та обертаються дисбаланси 14; 27, 28 - вали, на яких жорстко встановлені та обертаються дисбаланси 14, вали встановлені на підшипниках в циліндричному корпусі 5 інерціоїдів-муфт проекту "55". Корпуси 5 та 12 сконструйовані так, що забезпечують ефективне збирання та розбирання пристроїв інерціоїдів-муфт проекту "55". Принцип роботи пристрою наступний: протинаправлене обертання дисбалансів 14 забезпечується за рахунок приводу їх в обертання від двигуна 1, а обертання (направлене або реверсивні коливання типу вперед-назад) циліндричного корпусу 5 муфти забезпечується використанням двигуна 2. При цьому обертання (направлене або реверсивні коливання типу вперед-назад) всього пристрою в зборі забезпечується двигуном 3. Що, в кінцевому варіанті, забезпечує як генерування направленої відцентрової інерційної сили за рахунок як реверсивних коливань двигуна 3 та жорстокої фіксації вала двигуна 1 (вал двигуна 2 при цьому направлено обертається), або двигуна 2 (вал двигуна 1 при цьому направлено обертається), або ж за рахунок протинаправленого обертання двигуна 3, який компенсує направлене обертання двигуна 2 при або обертанні двигуна 1, або ж жорсткій фіксації вала двигуна 1. Що, в кінцевому результаті, і забезпечує генерацію направленого вектора рушійної сили-відцентрової сили інерції в контексті суперпозиції взаємодії, або ж переміщення вектора відцентрової сили інерції по колу. На фіг. 5 додатку креслень (аналог фіг. 6 з різницею в тому, що двигуни 1 та 2 кріпляться до корпусу 13 апарата використання) показано пристрій інерціоїдів-муфт проекту "55" "Бальбекваріант", який складається з: 1 - двигун приводу в обертання вала 9 приводу в обертання дисбалансів 14, в залежності від поставлених конструкторських завдань, може бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати вали обертання; 2 - двигун приводу в обертання циліндричного корпусу 5 муфти, в залежності від поставлених конструкторських завдань, може бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати свої вали обертання, жорстко кріпиться до корпусу-футляра 12 пристрою; 4 - вал корпусу 5 муфти; 5 - циліндричний корпус інерціоїдів-муфт проекту "55" (аналог-пристрої типу "Шаберуга", муфти проекту "22"); 6 - опорні підшипники кочення; 7 - баланси шестеренчастих передач 10, які також грають роль маховикових інерційних накопичувачів; 8 - редуктор інерціоїдів-муфт проекту "55", редуктори з передаточним числом рівним, або не рівним одиниці, в залежності від кількості шестерень 8 можуть мати значне передаточне число, можуть або ні працювати як коробки передач; 9 - вал приводу в обертання дисбалансів 14 інерціоїдів-муфт проекту "55"; 10 - шестерні редуктора 8 інерціоїдів-муфт проекту "55"; 11 - корпус апарата використання; 12 - циліндричний корпус-футляр пристрою муфти; 13 - корпус апарата використання; 14 - дисбаланси, можуть бути будь-якого типу, форми, конструкції, в тому числі і такі як дисбаланси муфт проекту "22"; 15 - циліндричний корпус дисбалансів, може мати додаткові перегородки для забезпечення стійкості валів, на яких обертаються дисбаланси 14; 16 - шестеренчаста передача (передаточне число z=1) приводу в обертання валів, на яких жорстко розташовані та обертаються дисбаланси 14; 27, 28 - вали, на яких жорстко встановлені та обертаються дисбаланси 14, вали встановлені на підшипниках в циліндричному корпусі 5 інерціоїдів-муфт проекту "55". Корпуси 5 та 12 сконструйовані так, що забезпечують ефективне збирання та розбирання пристроїв інерціоїдів-муфт проекту "55". Принцип роботи пристрою наступний: протинаправлене обертання дисбалансів 14 забезпечується за рахунок приводу їх в обертання від двигуна 1, а привід в обертання циліндричного корпусу 5 муфти забезпечується від двигуна 2. При цьому обертання (направлене або реверсивні коливання типу вперед-назад) всього пристрою в зборі забезпечується використанням відповідної роботи двигуна 2. Що, в кінцевому результаті, і забезпечує генерацію рушійної сили-відцентрової сили інерції в контексті суперпозиції взаємодії. При загальній величині передаточного числа, рівного або не рівного одиниці та використанні як двигуна 1 будь-якого типу двигуна, а як двигуна 2 крокового двигуна (серводвигуна), який може жорстко затискати (стопорити) свій вал (ротор) обертання та обертатися з швидкістю, приблизно рівною швидкості обертання двигуна 1, можливо забезпечити як направлений рух апарата використання, так і по спіралі будь-якої форми 7 UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 направленим поворотом двигуна 2 на відповідної величини крок в будь-яку сторону, що також можливо досягти деякою різницею частот обертання двигунів 1 та 2. Важливо відмітити те, що як двигун 2 можливо використовувати два двигуни, один з яких може працювати як кроковий двигун (серводвигун) та жорстко фіксувати свій вал обертання, а другий як звичайний двигун. На фіг. 8 додатку креслень (аналог - пристрої фіг. 12, фіг. 13) показано пристрій інерціоїдівмуфт проекту "55", який складається з: 2 - двигун приводу в обертання циліндричного корпусу 5 муфти, в залежності від поставлених конструкторських завдань, може бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати свої вали обертання, жорстко кріпиться до корпусу-футляра 12 пристрою; 3 - двигун приводу в обертання корпусу-футляра 12 пристрою (всього пристрою муфти в зборі разом з двигунами 1 та 2 приводів в обертання вала приводу в обертання дисбалансів та корпусу муфт) див. фіг. 1 - фіг. 22 додатку креслень, в залежності від поставлених конструкторських завдань, можуть бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати вали обертання, жорстко кріпиться до корпусу 13; 4 - вал корпусу 5 муфти; 5 - циліндричний корпус інерціоїдів-муфт проекту "55" (аналог-пристрої типу "Шаберуга", муфти проекту "22"); 6 - опорні підшипники кочення; 7- баланси шестеренчастих передач 10, які також грають роль маховикових інерційних накопичувачів; 8- редуктор інерціоїдів-муфт проекту "55", редуктори з передаточним числом, рівним або не рівним одиниці, в залежності від кількості шестерень 8 можуть мати значне передаточне число, можуть або ні працювати як коробки передач; 9 - вал приводу в обертання дисбалансів 14 інерціоїдів-муфт проекту "55"; 10 - шестерні редуктора 8 інерціоїдів-муфт проекту "55"; 11 - корпус апарата використання; 12 - циліндричний корпус-футляр пристрою муфти; 13 - корпус апарата використання; 14 - дисбаланси, можуть бути будь-якого типу, форми, конструкції, в тому числі і такі як дисбаланси муфт проекту "22"; 15 - циліндричний корпус дисбалансів, може мати додаткові перегородки для забезпечення стійкості валів, на яких обертаються дисбаланси 14; 16 - шестеренчаста передача (передаточне число z=1) приводу в обертання валів, на яких жорстко розташовані та обертаються дисбаланси 14; 27, 28 - вали, на яких жорстко встановлені та обертаються дисбаланси 14, вали встановлені на підшипниках в циліндричному корпусі 5 інерціоїдів-муфт проекту "55". Корпуси 5 та 12 сконструйовані так, що забезпечують ефективне збирання та розбирання пристроїв інерціоїдів-муфт проекту "55". Принцип роботи пристрою наступний: протинаправлене обертання дисбалансів 14 забезпечується за рахунок приводу в обертання циліндричного корпусу 5 муфти від двигуна 2 та затиснутого вала 9 приводу в обертання дисбалансів 14. При цьому обертання (направлене або реверсивні коливання типу вперед-назад з використанням самоблокуючих муфт, - див. а201405184) всього пристрою в зборі забезпечується двигуном 3. Що, в кінцевому результаті, і забезпечує генерацію рушійної сили-відцентрової сили інерції в контексті суперпозиції взаємодії. Також пристроєм фіг. 8 додатку креслень забезпечується генерація відцентрової сили інерції, вектор якої, в залежності від суперпозиції взаємодії двигунів 2 та 3 приводу в обертання, та обертанні одними двигуном 2 всього пристрою інерціоїда, переміщується або по колу обертання за рахунок направленого обертання двигуна 2 і в той же час простою двигуна 3 з жорсткою фіксацією його вала, або ж його сприянню, чи діє в строго заданому напрямку за рахунок компенсації двигуном 3 кута переміщення вектора відцентрової сили по колу від дії двигуна 2. Практично при роботі двигуна 3 (фіг. 35 додатку креслень), для забезпечення направленої генерації інерційної сили, буде відбуватися наступне: відбувся в положенні резонансу взаємодії (пол. 1) імпульс (імпульс "1") сили інерції резонансу взаємодії при обертанні дисбалансів 14, розміщених на двох валах, наступний імпульс (імпульс "2") резонансу взаємодії відбувається в положенні 2 (пол. 2) на їх поворот 180° ± αдв.2, де знак «+» ставиться в залежності від вибраної системи відліку, та відносному напрямку обертання дисбалансів 14 відносно корпусу 5 пристрою інерціоїда; αдв.2 - кут повороту корпусу 5 муфти забезпечений двигуном 2 (у випадку жорстко затиснутого вала 9 приводу в обертання дисбалансів 14 та відповідного передаточного числа редуктора 8, саме величина передаточного числа забезпечує величину αдв.2 - кута повороту корпусу 5 муфти між двома положеннями дисбалансів 14 резонансу їх взаємодії), що, в суперпозиції взаємодій, насправді і забезпечує направлений вектор згенерованої відцентрової сили інерції пристроєм - інерціоїдом-муфтою 5 проекту "55" (так двигуном 2 забезпечується зміна кута вектора інерційної відцентрової сили його рухом по колу, що й забезпечує рух апарата використання по колу, по спіралі). Для забезпечення направленої дії вектора сили інерції в резонансі взаємодій після цього імпульсу (імпульсу "2" (пол. 2)) починає короткочасно імпульсно спрацьовувати двигун 3, який повертає корпус 5 муфти в попереднє положення 8 UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 положення "1" (пол. 1) генерування, так сказати, передостаннього імпульсу інерції дисбалансів 14 резонансу їх взаємодії. Після цього двигун 3 вимикається та чекає часу наступного вмикання - в наступному положенні "2" резонансу взаємодії дисбалансів 14. Величина кута, на який двигуном 3 повертається корпус-футляр 12 з розташованою в ньому інерціоїдом-муфтою 5 проекту "55" (фіг. 35 додатку креслень), компенсуючого спіральне переміщення вектора сили інерції від дії двигуна 2 буде залежати від частоти обертання двигуна 2, та самим прямим чином впливати на величину загального імпульсу інерційної сили пристрою муфти при суперпозиції взаємодії імпульсів інерції "1" (пол. 1) та "2" (пол. 2). Робота двигунів 2 та 3, положення її корпусу 5 та положення її дисбалансів 14 та робота редуктора 17-18-19 керується відповідною автоматикою керування. У пристрої фіг. 3 та аналогічних йому пристроях Фіг.18, Фіг.19, Фіг.20 додатку креслень, в яких як привод в обертання інерціоїду-муфти проекту "55" використовується тільки двигун 2, вмикання в роботу електромагнітного тягового механізму 29 шестірні 18, або електромагнітного гальмо-фіксатора 30 шестірні 17 редуктора 17-18-19 здійснюється в моменти включення в роботу двигуна 3. Тобто (вмикаючи двигун 3 (або електромагнітний тяговий механізм шестірні 18, або електромагнітний гальмо-фіксатор шестірні 17) імпульсно тільки в проміжки часу між кожним наступним положенням (перше положення резонансу взаємодії дисбалансів 14 пропускається) резонансу взаємодії дисбалансів 14, які обертаються, так що швидкість обертання двигуна 3 (у випадку використання або електромагнітного тягового механізму шестірні 18, або електромагнітного гальма-фіксатора шестірні 17 редуктора 17-18-19 обертання корпусу-футляра від двигуна 2) повністю компенсує зміну кута вектора інерційної відцентрової сили при її переміщенні по колу, що забезпечить рух апарата використання по прямій. В цілому обертання двигуном 3 корпусу-футляра 12 може бути протилежним або співпадати за напрямком обертання двигуном 2 корпусу муфти 5, причому з різною відносною швидкістю двигунів 2 та 3 (що також можливо досягти використанням редуктора 17-18-19 варіаторного типу, з використанням як приводу в обертання тільки двигуна 2), що забезпечить рух апарата використання по спіралі різних параметрів з її закручуванням в різні боки, або рух по прямій. Рух прямо також можливо здійснювати, використовуючи пристрої фіг. 5, фіг. 6 додатку креслень з передаточним числом редуктора 8, рівним одиниці, що забезпечить генерування результуючої відцентрової сили в одному напрямі і як внаслідок рух апарата використання по прямій, при цьому вал 9 приводу в обертання дисбалансів 14 може нерухомо затискатися (нерухомо стопоритися) двигуном 1, яким можливо міняти напрямок дії результуючої сили інерції пристрою, а двигуном 2 забезпечувати обертання корпуса 5 редуктора. І в той же час можливо двигуном 2 міняти напрямок сили інерції пристрою, обертаючи корпус 5 інерціоїда, а двигуном 1 забезпечувати обертання дисбалансів 14, і в цілому забезпечувати заданий рух апарата використання відповідною величиною відношення частот обертання двигуна 1 та двигуна 2. Важливо відмітити про те що в разі необхідності забезпечення двигуном 2 великої швидкості обертання та водночас його роботи як сервомотор або кроковий двигун, можливо як двигун 2 використати одночасно два двигуни на одному валу обертання. При цьому крокову роботу двигуна 2 забезпечував кроковий двигун (серводвигун), а швидке обертання двигуна 2 забезпечував другий двигун - звичайний двигун потрібного типу. Кількість шестерень 10 редуктора 8 інерціоїда (фіг. 1 - фіг. 22 додатку креслень) може бути мінімальним - до двох штук. На фіг. 23 - фіг. 27 додатку креслень показані схеми використання зразу декількох такого типу інерціоїдів з одним приводом обертання їв валів 9 фіг. 1 - фіг. 22 додатку креслень приводу в обертання дисбалансів двигуном будь-якого (в тому числі і реактивного) типу 1, крупний момент від якого передається-роздається завдяки роздаточному редуктору 20 (може бути будьякого типу - конічного, черв'ячного і т.д.), роздаючому крутий момент певної частоти обертання на чотири (або іншу кількість) вали (-ів). Позиціями на фіг. 23 - фіг. 27 показані: 1 - привід в обертання валів 9 фіг. 1 - фіг. 22 додатку креслень приводу в обертання дисбалансів інерціоїдів-муфт проекту "55" двигуном будь-якого (в тому числі і реактивного) типу; 3 - двигун приводу в обертання корпусу-футляра 12 пристрою муфти, в залежності від поставлених конструкторських завдань, можуть бути будь-якого виду, в тому числі і спеціалізовані (спеціально розроблені), які здатні працювати як сервомотори, крокові двигуни, просто двигуни, жорстко фіксувати вали обертання; 4 - вали корпусів пристроїв; 5 - корпус інерціоїдів-муфт проекту "55", їх кількість на апаратах використання є довільною. Важливо відмітити про те, що в разі відносного направленого обертання інерціоїдів 12 (їх валів 9 фіг. 1 - фіг. 22 додатку креслень) фіг. 23 - фіг. 27 додатку креслень (наприклад коли інерціоїди обертаються протинаправлено або з певною, так сказати, різницею фаз - тобто дисбаланси 14 одного інерціоїда починають обертатися до центру корпусу 5 і в той же час дисбаланси іншого інерціоїду починають обертатися від центру корпусу 5 що, в кінцевому результаті збалансує 9 UA 112458 U dR відносно центру корпусу 5), що можливо забезпечити dt використанням, наприклад, роздаточного конічного і або черв'ячного, а то і циліндричного типу редуктора 20, або ж коли маса апарата використання дуже велика, або ж коли апарат використання має іншого типу контакт з зовнішнім середовищем, окрім реактивного чи аеродинамічного, може відпасти важливість для їх обертання додаткового використовувати опір зовнішнього середовища шляхом використання відповідного типу (реактивного або вентиляторного, або іншого типу відповідно до умов зовнішнього середовища експлуатації) двигунів 1 приводу в обертання вала 9 приводу в обертання дисбалансів 14 (це особливо стосується щодо літальних апаратів). На фіг. 28 - фіг. 34 додатку креслень показана схема приводу в обертання пристроїв інерціоїдів-муфт проекту "55" фіг. 1 - фіг. 22 додатку креслень. Використання маховика 7.1 дає можливість стабілізувати положення апаратів використання, використовувати двигуни, які працюють імпульсно, покращити умови експлуатації муфт та їх приводів в обертання, наприклад, з причини того, що динамічно змінюється радіус обертання дисбалансів 14 відносно центру корпусу 5, що змінює їх момент інерції. Об'єм маховика 7.1 може бути з матеріалу - сталі, або ж служити місткістю для палива для реактивного або вентиляторного типу двигуна 1, містити реактивного або вентиляторного типу двигун 1, або ж мати пристрій для генерації магнітного поля на основі використання ртуті (див. авторські роботи Троценка П.Д.). Фіг. 28 додатку креслень - робота пристрою як самобалансного вібратора; Фіг. 29 додатку креслень - забезпечення генерації відцентрової сили інерції, вектор якої, в залежності від суперпозиції взаємодії двигунів 1 та 3 приводу в обертання, та обертанні двигуном 3 всього пристрою інерціоїда, переміщується по колу обертання; Фіг. 30 додатку креслень - забезпечення генерації відцентрової сили інерції, вектор якої переміщується по колу обертання за рахунок жорсткого фіксування вала приводу в обертання дисбалансів 14 корпусу муфти та обертанню корпусу 5 муфти від двигуна 2 або через редуктор 17-18-19 див. фіг. 1 - фіг. 22 додатку креслень; Фіг. 31 додатку креслень - забезпечення генерації відцентрової сили інерції, вектор якої, в залежності від суперпозиції взаємодії двигунів 2 та 3 приводу в обертання, та обертанні одним двигуном 2 корпусу 5 муфти фіг. 1 - фіг. 22 додатку креслень, переміщується або по колу обертання за рахунок направленого обертання двигуна 2 і в той же час простою двигуна 3 з жорсткою фіксацією його вала, або ж його сприянню, чи діє в строго заданому напрямку за рахунок компенсації двигуном 3 переміщення вектору відцентрової сили по колу від дії двигуна 2 (пристрої, представлені на фіг. 1, фіг. 2, фіг. 7 додатку креслень). Фіг. 32 додатку креслень - забезпечення генерації відцентрової сили інерції, вектор якої, в залежності від суперпозиції взаємодії двигунів 1 та 2 приводу в обертання, та обертанні ними як вала приводу в обертання дисбалансів 14 корпусу 5 муфти, так і приводу в обертання безпосередньо корпусу 5 муфти, переміщується або по колу обертання, або ж діє в строго заданому напрямку. Фіг. 33 додатку креслень - забезпечення генерації відцентрової сили інерції, яка, в залежності від суперпозиції взаємодії двигунів 1, 2, 3 приводу в обертання, переміщується або по колу обертання, або ж діє в строго заданому напрямку за рахунок компенсації двигуном 3 переміщення відцентрової сили по колу від дії двигуна 2. Схема пояснює роботу пристрою інерціоїдів-муфт проекту "55", представленої на фіг. 4 додатку креслень. Фіг. 34 додатку креслень - забезпечення генерації відцентрової сили інерції, що, залежно від суперпозиції взаємодії двигунів 1, 2, 3 приводу в обертання, переміщується або по колу обертання, або ж діє в строго заданому напрямку за рахунок компенсації двигуном 3 переміщення відцентрової сили по колу від дії двигуна 2. Схема пояснює роботу пристрою муфти проекту "55", представленої на фіг. 8 - фіг. 13. Робота приводу - двигунів 1, 2, 3 є складною, тому потребує систем автоматики керування. Двигуни 1,2,3 можуть бути як електричні, двигуни внутрішнього згоряння, двигуни реактивного типу тощо. Спосіб роботи пристроїв інерціоїдів-муфт проекту "55" згідно з Фіг.35 додатку креслень у контексті фіг. 1 - фіг. 22 та фіг. 28 - фіг. 34 додатку креслень дає можливість набагато зменшити величину потужності приводу в обертання пристроїв за рахунок саме малої частоти обертання двигунів 2,3 один з яких обертає циліндричний корпус 5 інерціоїда типу "Шаберуга" або муфти проекту "22", а інший корпус-футляр 12 інерціоїдів-муфт проекту "55", що забезпечує малу величину споживаного крутного моменту двигуна 1 (або двигуна 2 див. наприклад фіг. 1, фіг. 2 додатку креслень) приводу в обертання дисбалансів 14, оскільки, при обертанні дисбалансів 14 зміну їх радіусів обертання 5 10 15 20 25 30 35 40 45 50 55 10 UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 до та від центра корпуса 5 муфт, момент, що може гальмувати обертання дисбалансів 14 до та особливо від центру корпуса 5 внаслідок чого малої частоти обертання, буде малий. Тому такий спосіб роботи пристроїв є найбільш ефективним. Як двигуни 2, 3 (окрім пристроїв фіг. 5, фіг. 6 додатку креслень) краще застосовувати електродвигуни, а двигун 1 (а також 2 в пристроях фіг. 13, фіг. 12, фіг. 7, фіг. 8 додатку креслень) може бути й реактивного типу, внутрішнього згоряння тощо. При використанні як двигуна 1 реактивного типу двигуна, передаточне число редуктора 8 краще брати рівним одиниці, - це найпростішої конструкції редуктор, який складається з декількох шестерень. Живлення електродвигунів відбувається аналогічно як і традиційних двигунів, і найкраще це робити через осі, корпуси. При можливому використанні як двигуна 2 реактивного типу двигуна важливо, щоб частота його вала була понижена понижуючим редуктором, а відповідна частота дисбалансів 14 була забезпечена відповідним передаточним числом редуктора 8 інерціоїда-муфти 5. Дуже важливо замітити про те, що вихлоп двигуна реактивного типу повинен бути направлений соплом в таку сторону, що забезпечувало б закручування апарата використання (це стосується літальних апаратів) у однакову сторону з напрямом обертання його ротора або маховика, що в кінцевому результаті забезпечить реактивну підтримку від зовнішнього середовища процесу обертання механізмів інерціоїдів. В цілому конструкція муфт проекту "55", які представлені в додатку креслень, та їх технологія роботи забезпечує відмінну маневреність апаратів використання за рахунок керованого використання двигунів 1, 2 та 3. Двигуном 2 можливо забезпечити рух апаратів використання по спіралі (керовано змінювати параметри траєкторії спіралі), а двигуном 3 можливо забезпечити рух апаратів використання по прямій в тому числі і додатково керовано змінювати параметри траєкторії спіралі. В той же час мала швидкість обертання вала двигуна 2 дає можливість значно зменшити потужність двигуна 1 (в тому числі і двигуна 2) приводу в обертання дисбалансів 14 муфти 5, оскільки значно зменшиться величина крутного моменту при обертанні дисбалансів 14 від центру корпусу 5 муфти. Аналогічних можливостей можливо досягти й використанням тільки двигунів 1 та 2 фіг. 5, фіг. 6 додатку креслень, що дещо складніше. Перевагою використання самобалансних вібраторів є те, що при обертанні дисбалансів, розташованих на двох протилежних валах, складові та крутні моменти їх відцентрових сил взаємознищуються. Кількість шестерень 10 редуктора 8 може бути мінімальним - дорівнювати двом. В цілому відмінною рисою пристроїв інерціоїдів-муфт проекту "55", основа конструкції яких є інерціоїди "Шаберуга" або муфти проекту "22" при загальному передаточному числі всіх їхніх передач рівному або не рівному одиниці є по-перше їх конструкційна відмінна риса, - а саме корпус 5 інерціоїдів типу "Шаберуга" або муфт проекту "22", який мас привід в обертання від двигуна 2, який обертається відносно циліндричного корпусу-футляра 12, додатково розташований в корпусі-футлярі 12, що також має двигун 3 приводу в обертання, який обертається відносно корпусу апарата використання. Вал 9 приводу в обертання дисбалансів 14 може або мати двигун 1 приводу в обертання або ж такого не мати, а бути жорстко затиснутим у корпусі - футлярі 12. При цьому внаслідок суперпозиції взаємодій двигунів 1,2,3 приводу в обертання частин пристроїв інерціоїдів-муфт проекту "55", даного типу пристосування (муфти проекту "55") можуть генерувати інерціальну силу, вектор якої може або переміщатися по колу, забезпечуючи переміщення апаратів використання по спіралі із закручуванням у необхідну сторону, або бути строго спрямованим в одному напрямку в площині, перпендикулярній валам 27, 28, на яких обертаються дисбаланси. Робота пристроїв інерціоїдівмуфт проекту "55" в контексті вимог Закону збереження імпульсу в замкнутій системі може бути забезпечена шляхом використання контакту із зовнішнім середовищем для підтримки обертання двигуна 1 (або 2 або 3) приводу в обертання деталей інерціоїдів-муфт або суперпозицією взаємодії двигунів приводу в обертання інерціоїдів-муфт зі взаємознищенням реактивних крутних моментів їх корпусів, при цьому в залежності від відносного обертання дисбалансів можливо забезпечити або генерування крутного моменту, або генерування направленої сили відносно центру мас з'єднаних двигунів приводу в обертання інерціоїдів. В остаточному підсумку, наприклад ЛА (літальний апарат), що використовує як основну силову установку пристрої (фіг. 1 - фіг. 22 додатку креслень), додатково пристрої, які здатні керовано впливати на інерційну та гравітаційну масу ЛА (літального апарату), і також динамічно змінювати свій гравітаційний потенціал, зможе не тільки змінити величину навантажень на механізми та деталі конструкції (а це забезпечить зменшення матеріаломісткості пристроївінерціоїдів), але й ефективно, використовуючи суперпозицію гравітаційних взаємодій із зовнішніми природними об'єктами, взаємовигідно взаємодіяти з ними в контексті суперпозиції й резонансу взаємодій у тому числі й поглинаючи імпульс сили динамічних гравітаційних 11 UA 112458 U 5 10 15 20 25 30 35 40 45 50 55 60 взаємодій, внаслідок чого розвивати набагато більші швидкості руху, у порівнянні з ЛА, що використовують тільки, так сказати, кінетичні двигуни традиційного типу - реактивного типу або навіть силові установки, які генерують відцентрові імпульси, оскільки в цьому випадку силова установка ЛА своєю дією як правило намагається перемогти вплив зовнішніх природних гравітаційних об'єктів. При цьому інерційний або ж безінерційний рух апарата 11 використання можливо забезпечити в такий спосіб. Змінне (зменшуване або збільшуване) прискорення інерції апарата 11 використання (маси його конструкції) і внаслідок чого генерування нею чверті гравітаційної хвилі тільки позитивного або тільки негативного знаку амплітуди відповідно доповнюється або ж приглушується (взаємодії у фазі або протифазі коливань гравітаційних хвиль) гравітаційним випромінювачем силової установки відповідно спрямованим збільшенням або зменшенням величини викривлення простору й, внаслідок чого, генеруванням чверті гравітаційної хвилі тільки позитивного або тільки негативного знаку амплітуди в контексті суперпозиції й індукції гравітаційних взаємодій як у колі тільки штучних гравітаційних випромінювачів, так і в колі штучних і природних гравітаційних випромінювачів, маси конструкції апарата використання, випромінювання його силової установки (гравітаційного випромінювача), і зовнішніх природних об'єктів гравітації. На фіг. 36 додатку креслень представлений ще один спосіб використання випромінювачів відцентрового типу, таких як муфти проекту "55", для створення крутного моменту, що може бути використано, наприклад, на пристроях-генераторах для виробництва електроенергії, які обертають динамо-машини. Суть даного способу генерування крутного моменту відносно осі X фіг. 36 справа додатку креслень полягає у використанні саме інерціоїдів-муфт проекту "55" з генеруванням ними імпульсів відцентрової сили інерції не тільки в одному напрямку - напрямку, перпендикулярному плечу L направляючої станини 21, але й генерування ними імпульсу інерції відцентрової сили, що переміщається, в залежності від суперпозиції взаємодій двигунів 1, 2, 3 (або ж двигунів 1, 2 чи 2, 3) фіг. 28 - фіг. 34 додатку креслень по колу дуги обертання самого інерціоїда-муфти проекту "55", конструкція якого представлена на фіг. 1 - фіг. 22, та схематично фіг. 28 - фіг. 34 додатку креслень. Важливо відмітити про те, що на протилежній стороні від осі обертання X фіг. 36 зліва додатку креслень, окрім розташованого справа, може бути розташований ще пристрій - муфта проекту "55", розташований на (платформі) направляючих 21 для балансу при обертанні, сила інерції якого буде направлена в протилежну сторону відносно її напрямку на пристрої, розташованому на протилежній стороні від осі X. При цьому, регулюючи плече L (фіг. 36 зліва додатку креслень), величина якого може встановлюватися автоматично виходячи з параметрів частот обертання пристроїв 5, величин їх відцентрової сили інерції та інших параметрів силових взаємодій, і внаслідок цього також і швидкості, що встановлюється, можливо домогтися стійкого обертання плеча L (платформи-направляючої 21 та розташованого на ній енергопристрою - муфти проекту "55" фіг. 1 - фіг. 22 додатку креслень), платформи, розташованої на підшипниках 6 навколо осі X (стояку 23) фіг. 36 справа додатку креслень та, як результат, забезпечити круговий рух магніту 22 біля обмотки 25, генеруючи в ній електричний струм. Обертання платформи 21 та розміщених на ній пристроїв 5 може бути в будь-яку сторону. Це і є ще один спосіб генерації обертового - крутного моменту, що використовується для створення енергії шляхом обертання відповідної конструкції генераторів електроенергії фіг. 36 додатку креслень. Пристрій - муфта проекту "55" розміщується на платформі - направляючих 21 жорстко або на підшипниках, та може автоматично переміщуватися по усій довжині платформи, змінюючи радіус обертання - плече L в результаті суперпозиції взаємодій. Загалом можливо стверджувати про те, що не дивлячись на існуючі негативні висновки, використання інерціоїдів все таки реально можливе! Можливо навіть враховуючи вимоги Закону збереження імпульсу в замкнутій системі. Виявляється потрібно всього лише забезпечити штучним шляхом контакт замкнутої системи (а саме звичайнісінького інерціоїда) з зовнішнім середовищем! Забезпечити контакт з зовнішнім середовищем можливо такими способами: використанням сил тертя, сил гравітації, сил аеродинамічного опору (мається на увазі сил опору від викиду струмин газів або від обертання крильчаток вентиляторів двигунів у газоповітряному просторі), гідродинамічного опору (мається на увазі сил опору від викиду струмин газів, струмин рідин, або від обертання крильчаток-вентиляторів (гребних гвинтів) двигунів в рідині, реактивного опору (мається на увазі сил опору від викиду струмин газів ракетних двигунів іншого типу двигунів, які здатні працювати у вакуумі, у газоповітряному середовищі, в рідині), гравітаційного опору (мається на увазі можливе використання гравітаційних випромінювачів, які здатні динамічно змінювати свої гравітаційні потенціали, моменти або прискорення інерції, генерувати відповідної величини та знаку амплітуду гравітаційної хвилі), використовуючи суперпозицію та резонанс взаємодій в колі інерціоїдів при 12 UA 112458 U 5 10 15 20 їх відносному обертанні, суперпозицію та резонанс взаємодії двигунів приводу в обертання інерціоїдів при їх відносному обертанні (як це забезпечено в пристроях інерціоїдів-муфт проекту "55" див. фіг. 1 - фіг. 22 додатку креслень (окрім пристроїв представлених на фіг. 5, фіг. 6 додатку креслень), що досягається саме використанням корпуса-футляра 12 відносно якого відбувається обертання деталей інерціоїдів та відносне обертання їх проводів у обертання двигунів, або навіть відносне обертання двигунів приводу у обертання відносно корпусу апарата використання (див. також пристрої на фіг. 5, фіг. 6 додатку креслень). При цьому двигун приводу у обертання інерціоїдів може бути будь-яким згідно з конструкторським задумом та умовами експлуатації, а пристрої, завдання яких забезпечувати контакт з зовнішнім середовищем повинні обов'язково бути відповідного типу в залежності від середовища експлуатації апаратів використання та конструкторського замислу. Безумовно забезпечувати обертання інерціоїдів та одночасно забезпечувати контакт апарата використання з зовнішнім середовищем, що дуже важливо для літальних апаратів використання, можливо й одним двигуном. При цьому саме реактивний струмінь, забезпечуючи контакт апарата 11 використання з зовнішнім середовищем, що важливо саме для літальних апаратів 11 використання, подавляє реакційну силу (реактивний крутний момент), утворену (-ний) на корпусі двигуна 1 приводу в обертання вала 9 приводу в обертання дисбалансів 14. Подавити реактивний крутний момент, утворений від обертання декількох інерціоїдів-муфт, або тільки в колі деталей інерціоїда-муфти можливо використовуючи суперпозицію взаємодій як самих інерціоїдів-муфт (мається на увазі взаємодії між інерціоїдами-муфтами), так і їх приводів в обертання - корпусів двигунів 1, 2, 3, або корпусів двигунів 1, 2, або корпусів двигунів 2, 3 (мається на увазі взаємодії між деталями інерціоїдів-муфт та їх приводами в обертання). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 55 60 Спосіб генерації інерційної сили з використанням суперпозиції взаємодій дисбалансів самобалансних вібраторів (інерціоїдів-муфт проекту "мат"), дисбаланси яких обертаються на валах в корпусах, які також обертаються, при цьому забезпечується генерування в площині, перпендикулярній валам, на яких встановлені дисбаланси як строго направленої в одному напрямі дії інерційної сили або зміни її напрямку дії по спіралі зі зміною її параметрів та закручуванням в різні боки в контексті суперпозиції взаємодії сил як в колі тільки від інерціоїдівмуфт, так і в колі від інерціоїдів-муфт та сил від зовнішніх природних об'єктів з результуючим генеруванням тільки направленої сили або ж крутного моменту різнонаправлених відносно центру мас апарата використання сил від декількох інерціоїдів-муфт, який відрізняється тим, що суперпозиція взаємодій інерційних сил дисбалансів досягається не тільки обертанням дисбалансів інерціоїдів-муфт через редуктор від двигуна 1, але й обертанням від двигуна 2, по осі, паралельній валам, на яких встановлені дисбаланси, корпусів пристроїв інерціоїдів-муфт самобалансних вібраторів, в яких вони жорстко встановлені на валах та обертаються на підшипникових опорах, але й обертанням (можливим застосуванням обертання) від двигуна 3, по осі, паралельній валам, на яких встановлені дисбаланси, корпусів-футлярів, в яких встановлені корпуси інерціоїдів-муфт, при цьому загальне передаточне число всіх передач інерціоїда-муфти може бути довільним, в тому числі і рівним одиниці (тобто редуктори інерціоїдів-муфт складаються з мінімальної кількості шестерень - двох), що, при певній взаємодії (при суперпозиції взаємодії) двигунів 1, 2, 3 або роботі двигуна 2 при затиснутому валу приводу в обертання дисбалансів або при суперпозиції взаємодії двигунів 1, 2 або ж двигунів 2, 3 приводу в обертання деталей інерціоїдів-муфт, при затиснутому чи ні валу приводу в обертання дисбалансів, при довільному загальному передаточному числі всіх передач інерціоїдів-муфт, в тому числі і рівному одиниці, забезпечує генерування в площині, перпендикулярній валам, на яких обертаються дисбаланси як строго направленої в одному напрямі дії інерційної сили або зміни її напрямку дії по спіралі зі зміною її параметрів та закручуванням в різні боки при суперпозиції взаємодії сил як в колі тільки від інерціоїдів-муфт, так і в колі від інерціоїдів-муфт та сил від зовнішніх природних об'єктів з результуючим генеруванням тільки направленої сили або ж крутного моменту різнонаправлених відносно центру мас апарата використання сил від декількох інерціоїдів-муфт, при цьому генерування строго направленої в одному напрямі дії інерційної сили або зміни її напрямку дії по спіралі зі зміною її параметрів та закручуванням в різні боки можливо забезпечити, вмикаючи двигун 3 (також у відповідних пристроях електромагнітний тяговий механізм шестірні 18 або електромагнітний гальмо-фіксатор шестірні 17) імпульсно тільки в проміжки часу між кожним наступним положенням (перше положення резонансу взаємодії дисбалансів пропускається), так що швидкість обертання двигуна 3 (також у відповідних пристроях у випадку використання або 13 UA 112458 U 5 10 15 20 25 30 35 40 45 електромагнітного тягового механізму шестірні 18, або електромагнітного гальма-фіксатора шестірні 17 редуктора 17-18-19) повністю компенсує або ні - тобто швидкість двигуна 3 більше або менше швидкості обертання корпусу інерціоїда-муфти від двигуна 2 (двигуна 2, який його обертає) швидкість обертання корпусу інерціоїда-муфти від двигуна 2 (або корпусу-футляра інерціоїда-муфти, в якому розташований корпус інерціоїда-муфти та до якого кріпиться двигун 2) при обертанні двигунів 2 чи 3 в одну або протилежні сторони (що також можливо досягти й використанням редуктора 17-18-19 варіаторного типу з використанням як приводу в обертання тільки двигуна 2, змінюючи величину та тривалість дії механізмів електромагнітного гальмафіксатора шестірні 17 або електромагнітного тягового механізму шестірні 18), при цьому вал приводу в обертання дисбалансів може бути затиснутим у корпусі-футлярі, при цьому апаратами використання (апаратами, які використовують інерціоїди-муфти проекту "мат") додатково можливе також використання гравітаційних випромінювачів, які динамічно змінюють (тільки зменшують або тільки збільшують, або ж циклічно з певною частотою зменшують, а потім збільшують або навпаки збільшують, а потім зменшують в контексті суперпозиції взаємодії як в колі тільки штучних гравітаційних випромінювачів, так і в колі штучних та природних гравітаційних випромінювачів) момент або прискорення інерції (величину та знак амплітуди гравітаційного потенціалу (гравітаційної хвилі або півхвилі, або четвертини хвилі)) впливаючих на гравітаційну взаємодію в колі апаратів використання інерціоїдів-муфт та зовнішніх гравітаційних об'єктів, при цьому організувати контакт з зовнішнім середовищем апарата використання (в тому числі організувати додаткову підтримку обертання деталей інерціоїдів-муфт двигунами 1 або 2 або 3), який використовує як силові пристрої тільки інерціоїди-муфти (інерціоїди), шляхом використання сил опору поверхні, сил тертя, сил гравітації, сил аеродинамічного чи реактивного опору (мається на увазі опору від викиду струменя газів або реактивного опору, або від обертання крильчаток вентиляторів двигунів у повітряно-газовому просторі), гідродинамічного (гідравлічного) опору (мається на увазі опору від викиду струменя газів, струменя рідин або від обертання крильчаток-вентиляторів (гребних гвинтів) двигунів у рідині), реактивного опору (мається на увазі опору від викиду струменя газів ракетних двигунів або іншого типу двигунів, здатних працювати у вакуумі або в газовому просторі, або в рідині), при цьому, якщо контакт з відповідного виду зовнішнім середовищем забезпечений відповідного типу двигунами (двигунами, які забезпечують привід в дію відповідних механізмів, які забезпечують контакт з зовнішнім середовищем, які здатні працювати в даному середовищі, використовуючи його опір або реактивний опір), то двигуни приводу в обертання інерціоїдів-муфт можуть бути будь-які (також двигуни приводу в обертання інерціоїдів-муфт можуть бути будь-які у випадку забезпечення умови взаємознищення реактивних сил (реактивних крутних моментів), утворених на корпусах двигунів приводу в обертання від обертання декількох інерціоїдів-муфт, або тільки в колі обертання деталей інерціоїда-муфти, при суперпозиції взаємодій як самих інерціоїдів-муфт, так і їх приводів в обертання - корпусів двигунів 1, 2, 3 або корпусів двигунів 1, 2, або корпусів двигунів 2, 3), якщо ж контакт з зовнішнім середовищем та обертання інерціоїда-муфти, (інерціоїдів-муфт) здійснюється одним двигуном, то його тип (вид) повинен насамперед забезпечувати контакт з зовнішнім середовищем, використовуючи його опір (або реактивний опір) для підтримки направленого обертання інерціоїдів-муфт з поглинанням реактивних крутних моментів корпусів двигунів приводу в обертання інерціоїдів-муфт, або ж контакт апарата використання з зовнішнім середовищем (поверхнею) повинен бути забезпечений відповідними механізмами (пристроями), які забезпечують контакт з ним (нею). 14 UA 112458 U 15 UA 112458 U 16 UA 112458 U 17 UA 112458 U 18 UA 112458 U 19 UA 112458 U 20 UA 112458 U 21 UA 112458 U 22 UA 112458 U 23 UA 112458 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 24
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 33/02, F03G 3/00
Мітки: генерації, інерційної, спосіб, сили
Код посилання
<a href="https://ua.patents.su/26-112458-sposib-generaci-inercijjno-sili.html" target="_blank" rel="follow" title="База патентів України">Спосіб генерації інерційної сили</a>
Спосіб отримання механічної енергії за рахунок сили гравітації та виштовхуючої сили води (архімедової сили) і пристрій для його реалізації – станція насосна гравітаційна снг “дал-вал”
Номер патенту: 46261
Опубліковано: 15.05.2002
Автори: Литвинов Олексій Михайлович, Литвинов Михайло Олексійович, Дрозд Олена Михайлівна
МПК: F04B 23/00
Мітки: спосіб, реалізації, води, виштовхуючої, енергії, архімедової, сили, рахунок, дал-вал, отримання, насосна, механічної, гравітаційна, снг, пристрій, гравітації, станція
Формула / Реферат:
1. Спосіб отримання механічної енергії за рахунок сили гравітації та виштовхуючої сили води (Архімедової сили) включає подачу води через канал на лопатеве колесо, з якого відбирають потужність, підйом води з бака, яку злили з лопатевого колеса та підіймання і опускання поплавка в резервуарі з водою, який відрізняється тим, що подачу води проводять з частини резервуара-поплавка, одночасно його порожнину сполучають з атмосферою і опускають...
Електрогідравлічний привід інерційної гальмівної системи
Номер патенту: 76856
Опубліковано: 15.09.2006
Автор: Кошарний Андрій Миколайович
МПК: B60T 13/00, B60T 13/68
Мітки: інерційної, привід, системі, гальмівної, електрогідравлічний
Формула / Реферат:
Електрогідравлічний привід інерційної гальмівної системи, що містить давач стоп-сигналу, давач тиску, два електромагнітних відсічних клапани і головний гальмівний циліндр, поршень якого зв'язаний штоком із зчіпним пристроєм, робоча порожнина з'єднана гальмівною магістраллю з колісними гальмівними циліндрами через перший відсічний клапан, а компенсаційний резервуар зв'язаний з гальмівною магістраллю через другий відсічний клапан, який...
Спосіб визначення сили опору сільськогосподарських машин
Номер патенту: 82732
Опубліковано: 12.08.2013
Автори: Артьомов Микола Прокопович, Лебедєв Сергій Анатолійович, Лебедєв Анатолій Тихонович, Кот Олександр Володимирович
МПК: G01L 1/00
Мітки: машин, сільськогосподарських, опору, сили, спосіб, визначення
Формула / Реферат:
Спосіб визначення сили опору сільськогосподарських машин, що включає вимір тягового опору тракторного агрегату, який відрізняється тим, що силу опору сільськогосподарської машини визначають по різниці поздовжніх прискорень розгону на певному ґрунтовому фоні тракторного агрегату з незадіяними робочими органами сільськогосподарської машини та тракторного агрегату з задіяними робочими органами при виконанні технологічного процесу.
Спосіб роботи парового двигуна внутрішньої генерації
Номер патенту: 80808
Опубліковано: 12.11.2007
Автор: Скалига Микола Миколайович
МПК: F02B 19/00
Мітки: внутрішньої, двигуна, парового, спосіб, генерації, роботи
Формула / Реферат:
1. Спосіб роботи парового двигуна внутрішньої генерації, що полягає у подачі в камеру згоряння автомобільного двигуна палива і водяного пилу, який відрізняється тим, що водяний пил подають в основну камеру, а паливо - у передкамеру основної камери згоряння двигуна або під час такту стиску, або під час такту наповнення.2. Спосіб за п.1, який відрізняється тим, що як паливо використовують газоподібний водень.3. Спосіб за п.1, який...
Спосіб генерації теплової енергії
Номер патенту: 103194
Опубліковано: 10.12.2015
Автори: Янович Віталій Петрович, Мінько Наталя Олександрівна, Козирська Світлана Едуардівна, Купчук Ігор Миколайович
МПК: F24F 12/00, F25B 27/00, B01D 61/06
Мітки: спосіб, енергії, генерації, теплової
Формула / Реферат:
Спосіб генерації теплової енергії, при якому передають теплову енергію від більш нагрітого носія, газу, до менш нагрітого повітря, який відрізняється тим, що використовують роторний концентратор, всередині корпусу якого монтують термоконцентратор у вигляді барабана, заповненого теплоємким матеріалом.
Попередній патент: Змішувальний пристрій
Наступний патент: Теплогенератор
Випадковий патент: Кулачковий патрон