Спосіб і пристрій для підйому й переміщення вантажу














Формула / Реферат
1. Спосіб підйому й переміщення вантажу за допомогою вантажопідйомного механізму, що містить засоби захвата для захоплювання щонайменше однієї точки кріплення вантажу, який містить:
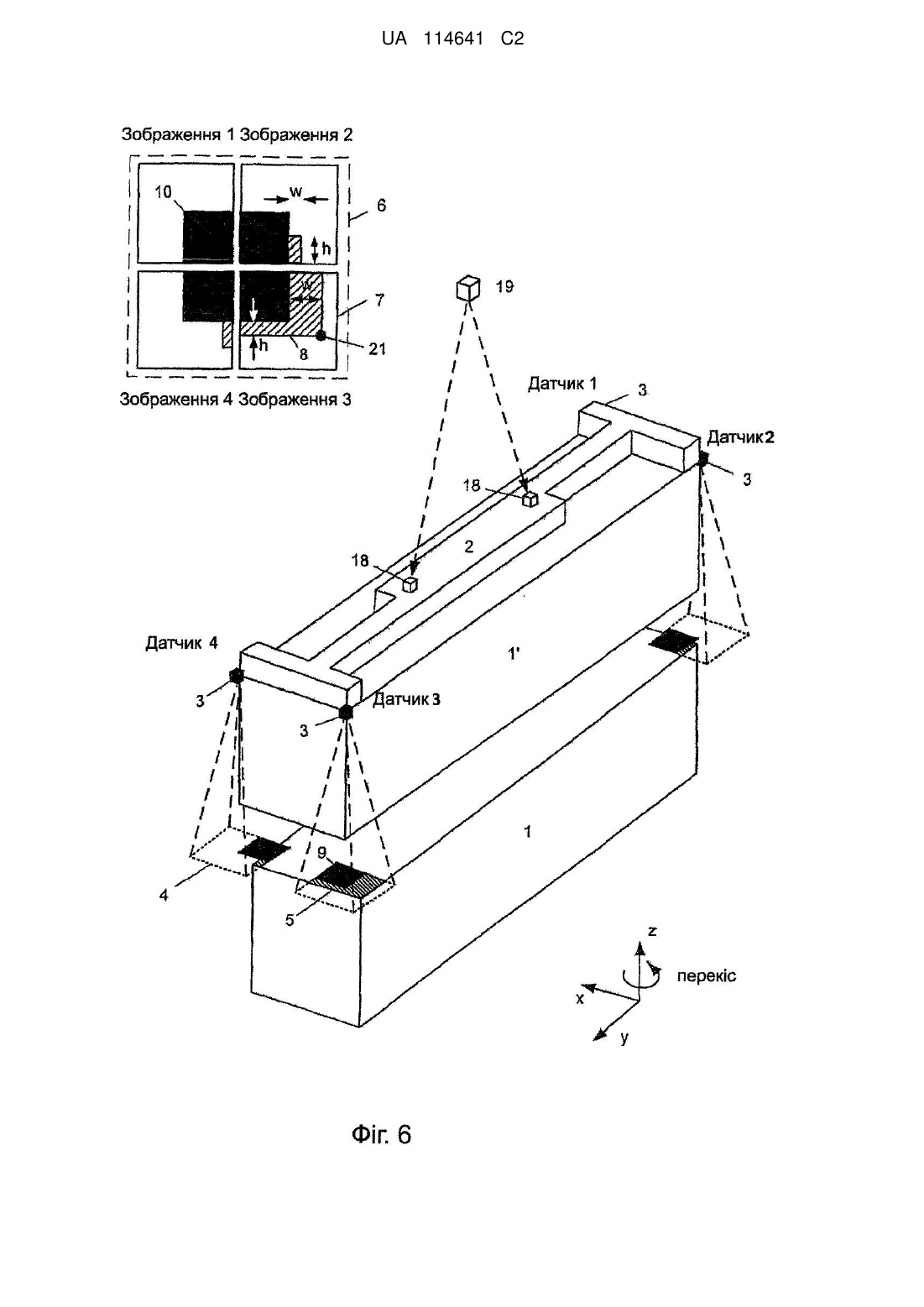
забезпечення в засобах захвата карти відстаней, яка включає множину точок, кожна з яких асоційована з інформацією про відстань, і в області якої відображена частина області вантажу, до якого прикріплюють засоби захвата й/або на який ставлять інший вантаж, а також відображені об'єкти навколо вантажу,
забезпечення множини карт відстаней, які описують різні області вантажів, в яких знаходяться точки кріплення або точки штабелювання,
формування групи карт відстаней, у якій частини карт відстаней, що містять вантажі, які підлягають обробці, відділені одна від іншої і від об'єктів, які їх оточують,
керування засобами захвата на підставі форм областей з карт відстаней, що задаються вантажами.
2. Спосіб за п. 1, який містить наступні етапи:
визначають на карті відстаней першу область вантажу, який підлягає підйому й переміщенню, коли вантаж прикріплений до засобів захвата,
визначають на карті відстаней другу область вантажу, який підлягає підйому й переміщенню, коли вантаж від'єднаний від засобів захвата,
визначають різницю між першою областю й другою областю, і
управляють засобами захвата на підставі зазначеної різниці.
3. Спосіб за будь-яким із попередніх пунктів, який містить наступні етапи:
визначають на карті відстаней першу область вантажу,
який підлягає підйому й переміщенню, коли вантаж прикріплений до засобів захвата, визначають на карті відстаней другу область вантажу,
визначають різницю між областями вантажу на карті відстаней,
управляють засобами захвата на підставі зазначеної різниці між областями вантажу.
4. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить забезпечення карти відстаней у системі координат засобів захвата, і
перетворення даних про відстань із зазначеної карти для нової системи координат, осі якої відрізняються від осей системи координат засобів захвата, і керування засобами захвата в новій системі координат.
5. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить керування засобами захвата, що включає переміщення засобів захвата в площині, яка перпендикулярна напрямку відстані в карті відстаней, або в напрямку глибини, тобто в напрямку відстані в карті відстаней, або в змішаному напрямку.
6. Спосіб за кожним із попередніх пунктів, який відрізняється тим, що містить забезпечення множини карт відстаней, і
керування засобами захвата на підставі симетрії зазначених карт відстаней.
7. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить обробку вантажу, яка включає в себе підйом вантажу й/або установку зазначеного вантажу зверху іншого вантажу.
8. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить керування засобами захвата для закріплення вантажу й/або для установки зазначеного вантажу зверху іншого вантажу.
9. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить забезпечення карти відстаней у площині, у напрямку якої здійснюють керування вантажем, при цьому карта відстаней містить відстані в напрямку, перпендикулярному зазначеної площини.
10. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що карта відстаней містить у собі область зображення, яка містить точки зображення, що включають одне або більше з наступного: інформацію про відстань, інформацію про інтенсивність світла, і колірну інформацію.
11. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить прикріплення вантажу до засобів захвата, при цьому карта відстаней містить область зображення, яка включає частину вантажу, що прикріплюється.
12. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить прикріплення вантажу до засобів захвата, при цьому частину карти відстаней, що перекривається вантажем, задають під час підйому вантажу, щоб відокремити її від інших вантажів і зберегти, наприклад, у пам'яті комп'ютера.
13. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить прикріплення вантажу до засобів захвата, при цьому збережену в пам'яті частину карти відстаней, що перекривається вантажем, ігнорують під час контролю інших вантажів.
14. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що засоби захвата містять спредер, що включає до себе, наприклад, один або декілька поворотних замків для прикріплення до литих куточків контейнера.
15. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що вантаж містить контейнер, при цьому карта відстаней визначає місця розташування контейнера, який розташований в штабелі контейнерів, або контейнера, який підлягає переносу, або в обох випадках, відносно засобів захвата.
16. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що засоби захвата містять спредер, причому один або декілька з його зовнішніх кутів, наприклад, два протилежних по довжині або по діагоналі кута, або всі зовнішні кути оснащені датчиком, що замірює карту відстаней.
17. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить демонстрацію карти відстаней водієві вантажопідйомного механізму, щоб допомагати водієві при піднятті й/або штабелюванні вантажу.
18. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить модифікацію карти відстаней за допомогою обробки зображення, щоб краще допомагати водієві при піднятті й/або штабелюванні вантажу.
19. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить введення карти відстаней у комп'ютер для забезпечення автоматичного підняття й/або штабелювання вантажу під управлінням комп'ютера.
20. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить неодночасне визначення положення щонайменше двох областей вантажу, який підлягає обробці, при цьому положення зазначених областей зберігають у пам'яті, щоб визначати місце розташування й перекіс вантажу.
21. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить задання карти відстаней у полі зору, що містить кут контейнера, який підлягає переносу, причому зазначений кут містить точку кріплення для засобів захвата.
22. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що вантажопідйомний механізм містить вантажопідйомний пристрій, наприклад піднімальний пристрій для контейнерів, такий як козловий кран або контейнеровоз-навантажувач.
23. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що для задання карти відстаней містить застосування 3D-камери, такої як камера, що вимірює час поширення світла, наприклад, часопролітна камера.
24. Пристрій, що містить засоби для здійснення способу за будь-яким із пп. 1-23.
25. Машинозчитуваний носій, на якому записано комп'ютерну програму, якою оснащений пристрій вантажопідйомного механізму, що здійснює спосіб за будь-яким із пп. 1-23.
26. Спосіб модернізації вантажопідйомного механізму, що містить установку в засобі підйому й переміщення вантажів пристрою за п. 24 або машинозчитуваного носія за п. 25.
Текст
Реферат: Підйом і переміщення вантажу здійснюють за допомогою вантажопідйомного механізму, що містить засоби захвата для втримання вантажу щонайменше в одній точці кріплення. При цьому спосіб містить формування в засобах захвата карти відстаней для області, в якій зображується частина поверхні вантажу, до якого прикріплюються засоби захвата й/або на який ставиться інший вантаж, а також зображуються об'єкти навколо вантажу. UA 114641 C2 (12) UA 114641 C2 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 Передумови створення винаходу Цей винахід стосується підйому й переміщення вантажу за допомогою вантажозахватного пристрою і, зокрема, способу й системи для підйому й переміщення вантажу за допомогою вантажозахватного пристрою, який приєднується до однієї або декількох точок кріплення вантажу. У цей час більшість міжнародних морських операцій перевезення товарів здійснюються в контейнерах. Такі контейнери являють собою тару коробчастої форми стандартних розмірів, довжиною 6,058 м (20-футовий контейнер), 12,192м (40-футовий контейнер) або 13,716 м (45футовий контейнер). Контейнер має ширину приблизно 2,5 м, при цьому сама типова висота контейнера становить приблизно 2,6 м і 2,9 м. Контейнери оснащені стандартними кутовими литими елементами - фітингами, які дозволяють піднімати й переміщати контейнер різними вантажопідйомними механізмами. Контейнерний вантажопідйомний механізм звичайно буває оснащений розсувним вантажозахватним пристроєм - спредером, що підвішується на вантажопідйомних тросах (канатах) або ланцюгах, причому довжину спредера можна регулювати за допомогою телескопічного механізму відповідно до довжини контейнера, який потрібно піднімати, наприклад, довжиною 6,058 м (20-футовий контейнер) або 12,192 м (40-футовий контейнер). Кути спредера обладнані спеціальними поворотними замками, які дозволяють захоплювати контейнер. Кутові фітинги контейнера обладнані отворами стандартної форми, у які входять поворотні замки спредера. Коли контейнерний вантажопідйомний механізм опустить спредер на верх контейнера так, що всі чотири поворотних замки спредера ввійдуть в отвори кутових фітингів, фіксатори поворотних замків можна повернути на 90°, що приведе до запирання фіксаторів у фітингах. Потім контейнер може бути піднятий у повітря, тобто підвішений на спредері. Звичайно контейнери можна ставити в штабелі один поверх іншого, наприклад, п'ять контейнерів друг на друга. Це дозволяє накопичувати велику кількість контейнерів на території невеликої площі, наприклад, на території контейнерного порту. Штабелювання контейнерів необхідно здійснювати ретельно, так щоб кутові фітинги на днищі контейнера, який необхідно ставити на штабель, були суміщені з кутовими фітингами на даху нижнього контейнера з точністю щонайменше 5 см. У противному випадку є небезпека розвалювання штабеля. Типовий контейнерний вантажопідйомний механізм, який використовують для підйому й штабелювання контейнерів, називається козловим краном (фіг. 1). Козловий кран може рухатися або по рейках (козловій кран на рейковому ходу, KKPX) або на гумових шинах (козловій кран на гумових шинах, ККГШ). При використанні козлового крана контейнери (1), що підлягають складуванню, розміщують рядами a, b, c, d, e між опорами козлового крана (14), так що між опорами козлового крана утворюються 6-8 рядів установлених паралельно один одному контейнерів, причому ряди звичайно містять, наприклад, п'ять поставлених один на одного контейнерів. Тоді між контейнерами й рядами контейнерів залишають проміжок, звичайно 30-50 см, щоб можна було легше перевантажувати контейнери. Звичайно між опорами козлового крана залишають проїзд (f), щоб можна було штабелювати в ряди (a, b, c, d, є) контейнери, які перевозять під козловим краном. У козловому крані спредер (2) за допомогою вантажопідйомних тросів (16) підвішений до спеціального візка (15), який можна переміщати в бічному напрямку контейнерного вантажопідйомного механізму й установлювати в різні положення, дозволяючи в такий спосіб піднімати й переміщати контейнери в різних рядах. Довжина контейнерних рядів може доходити до сотень метрів, тобто один за одним можуть стояти кілька дюжин 20-футових або 40-футових контейнерів. Причальний кран-перевантажувач конкретно призначений для підйому контейнерів і навантаження їх на судно або вивантаження із судна. У такому випадку візок крана також може переміщатися уздовж консольного мосту, щоб займати положення над судном, на якому виконуються навантажувальні операції. Інший типовий контейнерний вантажопідйомний механізм називається «контейнеровознавантажувач», який переміщається на гумових шинах і який значно вужче, ніж козловий кран. Контейнеровоз-навантажувач може працювати тільки з одним рядом контейнерів між своїми опорами, який звичайно складається з 3-4 контейнерів, поставлених один на одного. У цьому випадку між рядами контейнерів залишають значно більші проміжки, до 1,5 м, щоб забезпечити достатньо вільного простору для коліс контейнеровоза-навантажувача, щоб дати йому можливість переміщатися між рядами. Спредер (2) контейнерного вантажопідйомного механізму також часто оснащують спеціальним механізмом точного переміщення, і в цьому випадку, наприклад, за допомогою відтяжних тросів (17) підвіски спредера або за допомогою різних гідравлічних циліндрів можна 1 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 управляти горизонтальним положенням і перекосом спредера, при цьому немає необхідності надавати руху або переміщати візок (15) або весь контейнерний вантажопідйомний механізм. Призначення даної функції полягає в тому, щоб полегшити й прискорити захват контейнерів і їхню постановку в штабель один на один. Якщо реалізовано механізм точного переміщення спредера, наприклад, за допомогою відтяжних тросів (17), число яких звичайно дорівнює чотирьом, тобто по одному на кожний кут контейнера (фіг. 7), необхідне зусилля або різниця зусиль у відтяжних тросах створюється тоді, наприклад, за допомогою електромоторів, так щоб переміщати спредер горизонтально (х, у) у необхідному напрямку або перекошувати спредер у необхідному напрямку. Механізм точного переміщення спредера контейнеровоза-навантажувача звичайно реалізується за допомогою різних гідравлічних циліндрів. Коли машина для роботи з контейнерами, така як вищезгаданий контейнерний вантажопідйомний механізм, використовується для підйому й переміщення контейнерів, від водія потрібна висока точність на декількох етапах роботи. Прикладами таких етапів роботи є захват контейнера й постановка контейнера зверху іншого контейнера. Щоб зробити захват контейнера, спредером доводиться управляти в горизонтальному напрямку так, щоб точно розташувати спредер зверху контейнера, який має бути захоплений, або використовуючи механізм точного переміщення, або переміщаючи візок або контейнерний вантажопідйомний механізм цілком так, щоб, коли спредер буде опущений на верх контейнера, всі чотири поворотних замки спредера точно ввійшли в отвори кутових фітингів контейнера. Цей етап роботи для водія контейнерного крана є складним. У деяких випадках процес захвата полегшується механічними напрямними, установленими на спредері. Однак, зазначені напрямні ускладнюють роботу у вузьких проміжках між контейнерами. Щоб ставити контейнери один поверх одного, спредером і підвішеним до нього контейнером необхідно точно управляти, щоб позиціонувати спредер з контейнером зверху нижнього контейнера, використовуючи або механізм точного переміщення, або ж переміщаючи візок або цілком контейнерний вантажопідйомний механізм, так щоб увесь час у ході опускання верхнього контейнера на нижній контейнер кутові фітинги на днищі верхнього контейнера якомога точно були суміщені з кутовими фітингами нижнього контейнера. Точність при штабелюванні, до якої треба прагнути, звичайно становить близько 3 см. Фахівцям у даній області повинне бути зрозуміло, що даний етап роботи потребує від водія машини для підйому й переміщення контейнерів більшого часу й більшої точності, ніж при захваті контейнера, оскільки в цьому випадку процедуру вирівнювання контейнера зверху нижнього контейнера не можна полегшити, наприклад, за допомогою простих механічних напрямних, таких, про які говорилося вище. Дія контейнерних вантажопідйомних механізмів стає усе більше автоматизованою, і робота водія контейнерного вантажопідйомного механізму прискорюється й стає простіше за рахунок застосування, наприклад, комп'ютерного керування. У процесі подальшої автоматизації стає можливим взагалі видалити водія з машини для підйому й переміщення контейнерів. При цьому така машина працює або за допомогою дистанційного керування, і/або зовсім незалежно під управлінням комп'ютера. Часто також можливе виконання етапів роботи гнучким чином, тобто, якщо в якихось випадках з етапом автоматичної роботи система не справляється, оператор дистанційного керування як виняток може виконати даний етап роботи за допомогою дистанційного керування. Наприклад, у такій ситуації було б корисним, щоб застосовувана технологія могла гнучко адаптуватися й до роботи як помічник водія, і до автоматичної роботи під керуванням від комп'ютера. В існуючому відомому технічному рішенні для допомоги водієві при захваті контейнера використовують камери на приладах із зарядовим зв'язком (ПЗЗ-камери), що встановлені на спредері й орієнтовані в нижньому напрямку для передачі відеозображення, що дає можливість водієві виставляти спредер зверху контейнера. Однак даний спосіб не підходить для автоматизації роботи, оскільки алгоритми обробки зображення, які могли б дозволити контролювати положення контейнера за зображеннями від камер, діють ненадійно при різних погодних умовах і умовах освітлення. Даний спосіб також непридатний для штабелювання контейнерів, оскільки при штабелюванні датчик камери розташовується досить далеко від нижнього контейнера (3 м), і, крім того, верхній контейнер загороджує огляд водієві або в більшій частині, або повністю. Крім цього, верхній контейнер відкидає тінь на нижній контейнер, що робить проміжок між контейнерами дуже темним. У таким випадку дуже важко розрізняти нижній контейнер на відеозображенні. Розкриття винаходу Таким чином, завдання даного винаходу полягає в створенні способу й пристрою, який реалізує цей спосіб, які дозволяли б вирішити вищезгадані проблеми. Завдання винаходу 2 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 вирішується за допомогою способу, пристрою й комп'ютерної програми, відмітні ознаки яких викладені в незалежних пунктах формули винаходу. Кращі варіанти здійснення винаходу розкриті в залежних пунктах формули винаходу. Відповідно до першого аспекту винаходу, пропонується спосіб для підйому й переміщення вантажу за допомогою вантажопідйомного пристрою, який містить засоби захвата для втримання щонайменше однієї точки кріплення вантажу, при цьому спосіб містить формування в засобах захвата карти відстаней для області, у якій зображується частина поверхні вантажу, до якого прикріплюються засоби захвата й/або на який ставиться інший вантаж, а також відображуються об'єкти, що оточують вантаж. У відповідності з другим аспектом винаходу, пропонується пристрій, що містить засоби для здійснення способу, що відповідає першому аспекту. Відповідно до третього аспекту винаходу, пропонується комп'ютерний програмний продукт, що містить програмні інструкції, які, будучи завантаженими в пристрій, можуть забезпечити здійснення пристроєм, наприклад, вантажопідйомним механізмом, способу, що відповідає першому аспекту винаходу. Згідно ще одному аспекту винаходу, пропонується спосіб модернізації вантажопідйомного механізму, що містить складання у вантажопідйомному механізмі пристрою, що відповідає другому аспекту винаходу, або інсталяцію у вантажопідйомний механізм комп'ютерного програмного продукту, що відповідає третьому аспекту винаходу. В основі винаходу лежить ідея формування карти відстаней для частини поверхні вантажу, який підлягає підйому й переміщенню - частини, до якої виконується приєднання або зверху якої ставиться інший вантаж. Карта відстаней визначає множину точок, яким відповідають значення дистанції. Бажано, щоб дистанція представляла відстань в одному напрямку переміщення вантажу, наприклад, у вертикальному напрямку, щоб можна було управляти вантажем на основі карти відстаней, наприклад, у вертикальному напрямку й/або в інших напрямках руху, які можуть бути перпендикулярні вертикальному напрямку. Крім того, карта відстаней може визначати область поверхні вантажу, який підлягає переміщенню, даючи можливість переміщати вантаж шляхом контролю області карти відстаней, що лежить зовні від області вантажу, який підлягає переміщенню. Перевага способу й пристрою за винаходом полягає в тому, що виявляється можливим точно контролювати значимі частини вантажу, який необхідно переміщати. Крім того, зазначений контроль може легко й гнучко здійснювати або людина, або комп'ютер. Коли область, що підлягає контролю, обмежена тільки частиною вантажу, який необхідно переміщати, обробку інформації, що стосується контролю, можна підтримувати на простому рівні, при цьому можна підтримувати на низькому рівні кількість помилок, що виникають у ході контролю. Інші переваги й/або корисні якості будуть розкриті в наступному описі, у якому будуть розглянуті більш докладно різні варіанти здійснення винаходу. Короткий опис креслень Далі винахід буде розглянутий більш докладно на прикладах кращих варіантів здійснення з посиланнями на прикладені креслення, на яких: фіг. 1 зображує козловий кран, що встановлює контейнер на верх нижнього контейнера, фіг. 2 зображує датчик зображення 3D-камери, фіг. 3 зображує пристрій за винаходом, фіг. 4 зображує пристрій за винаходом і його роботу при захваті вантажу, фіг. 5 зображує пристрій за винаходом і його роботу після того, як вантаж прикріплений до пристрою захвата, фіг. 6 зображує пристрій за винаходом і його роботу в процесі штабелювання вантажу, фіг. 7 зображує спосіб реалізації автоматичного керування спредером (2) на основі областей карт відстаней, фіг. 8 зображує блок-схему алгоритму здійснення способу штабелювання вантажу, що відповідає варіанту здійснення винаходу, фіг. 9 зображує блок-схему алгоритму здійснення способу підйому й переміщення вантажу, коли керування вантажем здійснюється на основі карти відстаней, яка сформована в системі координат крана й в системі координат спредера, відповідно до варіанта здійснення винаходу, і фіг. 10 зображує блок для реалізації пристроїв, що відповідають варіантам здійснення даного винаходу. Здійснення винаходу В основі варіанта здійснення даного винаходу лежить визначення карти відстаней. Карта відстаней містить сукупність точок положення у двовимірній (2D) площині. 2D-площину можна визначити, наприклад, на основі системи координат, яка використовується засобами захвата 3 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 вантажу. Системою координат може служити, наприклад, декартова система координат з осями x і у, що дозволяє визначити 2D-площину, як площину, що визначається осями x і у. У такому випадку, будь-яку точку положення в такій 2D-площині можна визначити значеннями (х, у) по осях координат. У кращому випадку інформація про відстані являє собою дані дистанцій у напрямку, перпендикулярному зазначеній 2D-площині. Коли 2D-площина визначена осями x і у декартовій системі координат, інформація про відстані може містити значення по осі z цієї системи координат. У варіантах здійснення даного винаходу підйом і переміщення вантажу здійснюється за допомогою засобів захвата, які призначені для приєднання до вантажу. Приклади таких засобів захвата включають спредер і/або гак. Операції підйому й переміщення вантажу можуть містити захват вантажу - у цьому випадку засоби захвата використовують для приєднання до вантажу, і/або штабелювання вантажу - у цьому випадку вантаж, який переміщують за допомогою засобів захвата, укладають зверху іншого вантажу. Варіанти здійснення даного винаходу придатні для застосування при підйомі й переміщенні вантажів, таких як контейнери, наприклад, при захваті контейнера й/або при штабелюванні контейнерів. Слід зазначити, що варіанти здійснення даного винаходу можуть також бути застосовані для підйому й переміщення інших вантажів, у яких є одна або декілька точок кріплення, які дозволяють здійснювати підйом і переміщення вантажу. Точки кріплення можуть бути передбачені на вантажі фіксованим образом, або вони можуть бути створені ременями бандажного кріплення, наприклад, такими, які використовують для зв'язування пакетів дерев'яних дощок. Варіант здійснення даного винаходу заснований на використанні часопролітних камер (Time-of-flight чи TOF-Камер). TOF-камера - це приклад тривимірної (3D) камери. 3D-камери дають інформацію про відстані, пов'язані з двовимірним (2D) зображенням, і про точки 2Dзображення. Точки 2D-зображення можуть бути визначені як елементи зображення (пікселі), при цьому з кожним пікселем можна зв'язувати не тільки значення яскравості (І) світла але й інформацію про колір (RGB). 3D-камера, така як TOF-камера, прив'язує відстань (D), яка вимірюється від датчика зображення камери до об'єкта, що видає певному пікселю, до точок 2D-зображення. Нижче принцип роботи TOF-камери буде розглянутий досить докладно для розуміння винаходу. Стандартна камера на приладах із зарядовим зв'язком або ПЗЗ-камера містить фоточутливу матрицю, яка виготовлена за напівпровідниковою технологією і містить чутливі фото діоди, що розташовані у вигляді регулярного растра (7) (фіг. 2). Такий растр, наприклад, у сучасній 6-мегапіксельній камері може містити, наприклад, до 2816 рядів і 2112 стовпців. Один такий чутливий фото діод називають пікселем (13). Коли такий фотодіод піддається впливу світла, який зазвичай проходить через об'єктив, цей фотодіод вимірює інтенсивність (І) світлового випромінювання, яке він приймає. Таким чином, стандартна ПЗЗ-камера вимірює інтенсивність світла на кожному пікселі (13) растра (7). Звичайно одиночний фоточутливий діод не сприймає кольору, але перед фоточутливим діодом можна розташовувати фільтри різних кольорів, щоб ПЗЗ-камера могла також вимірювати кольори на зображенні. Кольоровими фільтрами звичайно є червоний, зелений і синій (R, G, В) фільтри. Загалом, стандартна ПЗЗ-камера вимірює такі величини для кожного пікселя (13) растра: (І, R, G, В), хоча із цього набору часто опускають колірну інформацію, як непотрібну. У цей час ПЗЗ-матриці всі частіше заміняють матрицями з комплементарною структурою «метал-оксид-напівпровідник» (Complementary Metal-Oxide-Semiconductor, CMOS), робота яких у своїй основі аналогічна роботі ПЗЗ-матриць, але вимірювання інтенсивності світла, зокрема A/D (аналого-цифрове) перетворення, виконується в схемі самої матриці, у той час як при використанні ПЗЗ-матриць зазначене перетворення виконується поза схемою матриці. Часопролітна (TOF) камера відрізняється від стандартної ПЗЗ (або CMOS) камери тим, що стандартна камера вимірює світло, що приходить від навколишніх предметів, а TOF-камера незалежним чином формує світло, яке потім вимірює, і з цією метою освітлює об'єкт власним джерелом світла. Крім цього, TOF-камера вимірює час, який потрібний світлу, яке випромінює камера, щоб поширитися до об'єкта, видимого на зображенні, і після відбиття повернутися до датчика зображення камери. Такий вимір часу поширення світла TOF-камера здійснює окремо для кожного пікселя (13) растра (7) (n, m). Додатково до стандартного зображення, тобто до карти інтенсивностей І (n, m) і можливої карти кольорів R(n, m), G(n, m), В(n, m), TOF-камера також формує карту відстаней D(n, m) у поле (7) зображення. 4 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 У варіантах здійснення даного винаходу вимір часу поширення світла може бути реалізовано, наприклад, в TOF-камері в такий спосіб. Світло, яке випромінюється в напрямку об'єкта, піддається модуляції несучою радіочастотою (RF, Radio Frequency) і здійснюється порівняння фази відбитого світла, що вертається від об'єкта, з фазою вихідної несучої радіочастоти, що дозволяє визначити зсув по фазі між випромінюваним і відбитим світлом. Зазначений зсув по фазі можна визначити для кожного пікселя зображення незалежно. На основі зсуву по фазі можна визначити час поширення світла від камери до об'єкта й назад для кожного пікселя зображення. Нарешті, використовуючи відоме значення швидкості поширення світла, можна обчислити відстань (D) від об'єкта до кожного пікселя зображення. TOF-камера може виконувати описаний процес вимірювання відстані із частотою до 100 разів за секунду. У цей час TOF-камери здатні вимірювати відстані, звичайно, до дистанції приблизно 6 м. Слід зазначити, що вищеописаним способом відстані можна також вимірювати для групи точок зображення, наприклад, шляхом усереднення зсувів по фазі для групи пікселів, або шляхом вибору одного пікселя з групи пікселів, що об'єднані разом, щоб представляти площадку, яка створена цією групою пікселів. Додатково до інформації про відстань (D) TOF-камера в типовому випадку також вимірює нормальне чорно-біле або кольорове зображення. Загалом, TOF-камера вимірює наступні величини для кожного пікселя (13) растра (7): (І, R, G, В, D), де D - відстань (у просторі) від датчика зображення камери до об'єкта, що є видимим для пікселя (13) зображення. Розділення сучасних TOF-камер порівняно помірне, звичайно 320x240 пікселів, але й таке розділення дозволяє вирішувати ряд технічних завдань. При використанні типового об'єктива розмір одного пікселя відповідає розміру приблизно від 1 мм до 1 см на об'єкті виміру. Розглянута TOF-камера зокрема придатна для застосування в пересувних робочих машинах, оскільки камера не містить ніяких механічних вузлів, що рухаються, і, таким чином, є дуже стійкою, наприклад, відносно ударів, якім піддається спредер (2). Для фахівців у даній області повинне бути зрозуміло, що спосіб і пристрій за винаходом можуть бути здійснені за допомогою 3D-камери, яка побудована на технології, що відрізняється від TOF, і яка з високою частотою, наприклад, 10 Гц або більше, формує щонайменше інформацію про дистанцію (D) для пікселів зображення об'єкта, який має бути записаний, і в якихось варіантах здійснення - щонайменше інформацію про інтенсивність і дистанцію (І, D) для пікселів зображення об'єкта, який має бути записаний. Прикладами придатних технологій побудови 3D-камери серед інших можуть служити пленоптична камера й стереокамера. У пленоптичній камері перед датчиком зображення встановлений спеціальний растр із мікролінз. Пленоптична камера після зйомки дозволяє, наприклад, робити фокусування на будь-яку необхідну відстань. Аналогічно, можна вважати, що стереокамера може формувати інформацію про інтенсивність ідистанцію (І, D). Однак, слід зазначити, що оскільки потрібні стереозображення, фізичний розмір стереокамери (яка складається із двох камер) надто великий для застосування в даному винаході й одержання інформації про дистанцію (D) для кожного пікселя зображення є менш надійним через обмежену продуктивність алгоритмів узгодження зображень стереопари. На фіг. 1 зображений козловий кран (14), що встановлює контейнер (1’) на верх нижнього контейнера (1). Звичайно, контейнери (1) складують у вигляді довгих рядів між опорами козлового крана (14). Між штабелями контейнерів залишають проміжок, звичайно 30-50 см. Козловий кран (14) захоплює контейнер спеціальним спредером (2), що звисає від візка (15) козлового крана, і підвішений на вантажопідйомних тросах (16). Шляхом укорочування або подовження вантажопідйомних тросів (16) здійснюють підйом або опускання контейнера (1’), який підлягає переміщенню. Контейнер (1’), який підлягає переміщенню, можна переміщати в горизонтальних напрямках або шляхом пересування візка (15) або самого козлового крана (14), або за допомогою спеціального механізму точного переміщення, що може бути реалізований, наприклад, на основі відтяжних тросів (17). Відтяжні троси (17) дозволяють прикладати до спредера (2) бічні зусилля, щоб переміщати спредер (2) і/або задавати спредеру перекіс. На фіг. 2 зображений датчик (матриця) (7) зображення 3D-камери (3), наприклад, часопролітної камери (TOF-камери). Датчик зображення містить масив пікселів (13), які приймають світло від об'єкта, що підлягає запису. Пікселі датчика зображення створюють відповідне поле (область) зображення камери. У датчику зображення падаюче світло, що прийняте пікселем, перетворюється в електричний сигнал. Електричний сигнал може містити інформацію про відстань до записуваного об'єкта, інформацію про обмірювану інтенсивність світла й інформацію про колір (наприклад, R, G, В), або комбінацію згаданих величин. Звичайно пікселі в матриці (7) розташовані у вигляді регулярних рядів і стовпців. 3D-камера звичайно для кожного одиночного пікселя (13) робить вимірювання наступних величин: інтенсивності світла 5 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 (І), виявленої фотодіодом, що відповідає даному пікселю, і, в деяких випадках, колірні компоненти (R, G, В), вимірювані за допомогою різних кольорових фільтрів. 3D-камера додатково, на основі часу поширення світла, випромінюваного камерою, вимірює відстань (D) до об'єкта, який видно на зображенні, для кожного окремого пікселя (13) n, m. Таким чином, додатково до стандартного нерухливого й/або відеозображення 3D-камера за допомогою її датчика (7) зображення формує також карту відстаней D(n, m). Відповідно до варіанта здійснення винаходу, для формування карти відстаней використовується датчик зображення 3D-камери, такій як TOF-камера. Пікселі датчика зображення у своєму положенні вимірюють інформацію про відстань, і тим самим пікселі (n, m) датчика зображення формують карту відстаней. Карта відстаней може бути збережена в пам'яті, наприклад, у пам'яті комп'ютера (20) на фіг. 7. За допомогою множини 3D-камер може бути сформована множина карт відстаней. Зазначені карти відстаней можна зберігати у вигляді нерухливих зображень або у вигляді відеозображень. Положення контейнерів, показаних на фіг. 3, 4, 5, 6, 7, описується в системі координат х, у, причому вісь x системи координат розташована в напрямку ширини спредера, а вісь у розташована в напрямку довжини спредера, що дозволяє визначати положення контейнера значенням координати х, значенням координати у і кутом повороту системи координат, наприклад, у градусах. Крім того, інформація про положення контейнера може містити дані стосовно вертикального положення контейнера в напрямку осі z, що дозволяє визначати поворот контейнера, як поворот навколо осі z. На фіг. 3 зображений пристрій за винаходом, у 3D-камери (3) установлені на зовнішніх кутах спредера (2). Зазначені 3D-камери можуть бути встановлені на одному, двох, трьох або чотирьох зовнішніх кутах. Чим більше число 3D-камер, тим вище точність підйому й переміщення контейнера й тим простіше керування. Спредер приєднується до контейнерів за допомогою їхніх кутових фітингів. У такому випадку, поле зору 3D-камери, що встановлена на зовнішньому куті спредера, охоплює бічні сторони контейнера (1’), який потрібно перенести, і кут цього контейнера, що показано заштрихованою областю (11). Область (9, 10) залишається під контейнером, що висить на спредері, і вона не зображується 3D-камерою (3). Таким чином, поле зображення 3D-камери на містить ніякої інформації про об'єкти, які розташовані під контейнером, який потрібно перенести, такі, наприклад, як дах іншого контейнера. Відповідно до одного з варіантів здійснення винаходу 3D-камера встановлена трохи поза периметром спредера, як у напрямку ширини (х), так і в напрямку довжини (у). Придатна точка установки знаходиться на відстані, наприклад, 5-10 см назовні від лінії периметра. Переважно, щоб 3D-камера була спрямована вниз, у напрямку контейнера, з яким потрібно працювати. Таким чином, напрямком візування встановленої 3D-камери є напрямок, у якому здійснюється прийом і доставка контейнерів, що прикріплюються до спредера. На фіг. 3 зображений приклад установки такої камери (3) на спредер (2) і зображення (7) відстаней, що бачить датчик камери, коли здійснюється установка контейнера (1’) на верх іншого контейнера (1). Область (4) зображення, яка охоплюється датчиком, тоді частково збігається з контейнером (1’), який потрібно перенести, оскільки датчик (3) установлений дуже близько до зовнішнього кута контейнера (1’). У такому випадку, частина (10) області зображення датчика камери містить зображення контейнера (1’), який підлягає перенесенню. Дана область зображення містить точки зображення бічної частини контейнера (1’), що лежать усередині трикутної області (11). Датчик камери вимірює величини відстаней (D1) для точок зображення, що відповідають точкам, які попадають у зазначену трикутну область, причому область цих відстаней простирається від нуля до висоти контейнера. Аналогічно, зона (9) області (4) зображення, що відповідає області тіні під контейнером (1’), який підлягає перенесенню, залишається повністю невидимою для датчика (3). Розмір області (10) зображення змінюється відповідно до того, наскільки високо перебуває контейнер (1’), який підлягає перенесенню, а також в певній мірі відповідно до того, як сів зазначений контейнер у поворотних замках спредера. Тим часом, від зони, що лежить за межами області (9), від верхньої поверхні (8) нижнього контейнера (1) датчик (3) вимірює величини відстаней (D2), що вказують на дистанцію між нижнім контейнером (1) і датчиком (3). Від зовнішніх точок, розташованих усередині області (4, 7) зображення, які не відповідають нижньому контейнеру (1), але все-таки можливо відповідають землі або контейнерам на більш низьких рівнях (у частині області 7 зображення, що не включена в області 8 або 10), датчик (3) вимірює величини відстаней (D3), які явно більше величин відстаней (D2). Залежно від взаємного положення верхнього й нижнього контейнерів область (8) може бути прямокутною, може мати форму букви L або може повністю зникати, коли кут нижнього контейнера повністю ховається під верхнім контейнером. Якщо інші 6 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 контейнери розташовані поруч із контейнером (1), датчик (3) може давати показання відстаней порівнянні з відстанню D2 також від зовнішніх країв області (4, 7) зображення, але оскільки між контейнерами, що підлягають штабелюванню, залишають проміжок 30-50 см, ці показання, отримані від зовнішніх країв, можуть бути відділені від області (8) і відкинуті, як помилкові. Нижній контейнер, у разі потрапляння в область (4, 7) зображення камери, може бути частково (8) видимий під верхнім контейнером на зображенні, яке видає камера. В області (10) зображення, що залишається в тіньовій зоні (9), 3D-камера вимірює відстані D1, при цьому для пікселів камери об'єктами служать сторони контейнера, який переносять, в області (11). У такому випадку відстані D1, вимірювані 3D-камерою в області (10), що залишається в тіньовій зоні, обмежені висотою контейнера, який переносять, а відстані, що підлягають виміру, обмежені нижнім краєм зазначеного контейнера. Наприклад, відстані D1 по прямій коротше або приблизно дорівнюють висоті h контейнера (1’). Аналогічно, 3D-камера від області (8) зображення вимірює відстані D2, які більше висоти контейнера (1’). Ці відстані вимірюються від тієї частини області зображення, що розташована поза (8) тіньовою зоною. Область, що залишається поза тіньовою зоною, може містити контейнер і/або інші об'єкти, які залишаються під контейнером, який переносять. Коли контейнер, який переносять, перебуває в повітрі, границя між тіньовою зоною й зоною, що лежить поза тіньовою зоною, може бути визначена, наприклад, на основі зміни відстаней, вимірюваних від області зображення. Зміну можна виявити, як зміну величин відстаней для двох сусідніх пікселів, яка більше певної порогової величини. У той час, коли один піксель як інформацію про відстань D(n, m) містить інформацію про відстань, що вимірюється від бічної сторони (11) верхнього контейнера, наступний піксель відповідає області, що лежить поза тіньовою зоною в області зображення 3D-камери, і видає сигнал відстані, що на порогову величину перевищує відстань, виміряну від бічної сторони контейнера. Ця порогова величина може бути обрана відповідно до необхідного розділення. Порогову величину для визначення границі між тіньовою зоною й зоною, що лежить поза тіньовою зоною, можна також вибирати на основі висоти контейнера. Висоти контейнерів стандартизовані, що дає можливість границю тіньової зони визначати шляхом порівняння відстаней, вимірюваних від бічної сторони контейнера, з відомою висотою контейнера. Крім того, слід зазначити, що додатково допомогти визначенню границі може зміна інформації, що міститься в сусідніх пікселях, у порівнянні з деякою пороговою величиною. Інформацію, що міститься в пикселях, наприклад, відстань, інтенсивність і/або колірну інформацію, можна порівнювати з відповідними пороговими величинами, які були встановлені для зазначених видів інформації. До того ж, границю між тіньовою зоною й зоною, що лежить поза тіньовою зоною, можна визначати шляхом обробки інформації, яка вимірюється 3D-камерою для певного пікселя. Дані про відстань, дані про інтенсивність і/або колірні дані сусідніх пікселів можна, наприклад, диференціювати, а величину похідної можна порівнювати із пороговою величиною похідної. Область (7) зображення 3D-камери може містити тіньову зону (10), область (9) під даною тіньовою зоною, що не входить у поле (4) зору 3D-камери, і область (12, 8), яка лежить поза тіньовою зоною, і яка може містити точки об'єктів, що оточують тіньову зону, наприклад, поверхонь контейнерів, підлоги або землі. Згідно з фіг. 3, біла зона області (7) зображення відповідає частині поля (4) зору 3D-камери, що лежить поза тіньовою зоною і ще далі поза тіньовою зоною за межами контейнера (1), який розташований у полі зору 3D-камери. Від цієї області 3D-камера вимірює відстані D3, які і більше, ніж відстані D2 і ще більше, ніж відстані D1, які вимірюються від контейнера (I ), який підлягає переміщенню й створює тіньову зону. На фіг. 4, 5, 6 вантаж являє собою контейнер (1, 1’) який піднімають і переносять за допомогою спредера (2). Фіг. 4 зображує пристрій за винаходом і його роботу, коли здійснюється захват вантажу. Фіг. 5 зображує пристрій за винаходом і його роботу після того як вантаж був прикріплений до спредера, а фіг. 6 зображує пристрій за винаходом і його роботу, коли здійснюється штабелювання вантажу. На фіг. 4, 5, 6 на зовнішніх кутах спредера (2) установлені 3D-камери (3). Поле (4) зору кожної камери показано як область (4) зображення. Області зображення 3D-камер створюють сімейство (6). У зазначеному сімействі, частини карт відстаней, утворені областями зображення, які містять вантажі, що підлягають підйому й переміщенню, відділені одна від одної і від їхнього оточення. Сімейство зображень утворює композицію, у якій частини карт відстаней, що містять вантаж, який підлягає підйому й переміщенню, поміщені в середину, у той час як частини карт відстаней, які розташовані поза частинами, що представляють зазначений вантаж, поміщені на краї композиції. 7 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 Сімейство зображень формується, коли 3D-камери бачать кути контейнера (1, 1’), оскільки інтерес представляє частина (5, 11), що попадає в поле (4) зору камери. Частини контейнера, не прикріпленого до спредера, що попадають у поле зору 3D-камери, показані в області (7) зображення камери у вигляді заштрихованих зон (8). 3D-камери вимірюють відстані (D) до об'єктів (5, 11) у полі зору 3D-камер. Вимірювані відстані показані в області (7) зображення кожної 3D-камери, як зони (8, 10), що відповідають об'єктам (5, 11) у полі зору. Композиція дає можливість водієві контейнерного вантажопідйомного механізму ясно бачити положення кутів контейнера один відносно одного, наприклад, у складних умовах освітлення в темних проміжках, утворених штабелями контейнерів. Водієві може бути пред'явлена, наприклад, стандартна картина розподілу інтенсивностей, одержувана від камери, яка містить, наприклад, області (піксели зображення) полів, у яких розташовані (8, 10) контейнери, що підлягають підйому й переміщенню, які пофарбовані в різні кольори. Пофарбовані частини зазначених полів зображення можуть бути частково прозорими, ніби стандартна картина інтенсивностей, одержувана від камери, видна з-під фарбування, або ж пофарбовані частини (8, 10) полів зображення можуть бути зовсім непрозорими. Відносний розмір і відмінності областей, які є важливими для водія, наприклад (8), можуть також бути графічно посилені комп'ютером (20), так щоб водієві було легше виявляти навіть невеликі відхилення положення, наприклад, між верхнім і нижнім контейнером. TOF-камера є особливо придатним інструментом для реалізації описаної функції, оскільки той самий датчик (3) камери формує й звичайне зображення (тобто карту інтенсивності I(n, m)), і карту відстаней D(n, m). У кращому варіанті 3D-камери встановлені на спредері так, що створюване ними зображення кожного з кутів контейнера, після того як контейнер приєднаний до спредера, симетрично зображенням від інших камер. Це полегшує роботу, особливо, коли інтерес представляє функція допомоги водієві, оскільки полегшує водієві виявлення симетричної ситуації. Симетрія може бути досягнута, наприклад, коли області (8) контейнера в області зображення 3D-камери буде мати однаковий розмір і форму для всіх 3D-камер спредера. Різними видами симетрії є, наприклад, математичне відбиття картини відносно прямій лінії, а також відбиття або поворот картини щодо точки. Така конфігурація може бути отримана шляхом установки кожної 3Dкамери в тому самому місці щодо зовнішнього кута спредера, до якого 3D-камера прикріплена, а також, якщо необхідно - шляхом масштабування зображень, створюваних 3D-камерами. Симетрія областей зображення 3D-камер після того, як контейнер приєднаний до спредера, і композиція, складена з областей зображень від декількох 3D-камер, дозволяє управляти спредером, коли здійснюється захват контейнера. У такий спосіб при виконанні захвата контейнера спредером можна управляти з метою одержання взаємно симетричних областей зображення від 3D-камер. Відповідно до варіанта здійснення даного винаходу, із зображень, створюваних 3Dкамерами, формується сімейство (6) зображень, у якому частини областей зображення, створюваних 3D-камерами, які містять контейнер, що підлягає захвату, розміщуються в середині, у той час як частини областей зображення, що лежать поза частинами, які представляють контейнер, що підлягає захвату й переносу, розміщуються на краях композиції. Існує можливість, щоб у композиції були залишені деякі проміжки між областями зображень від різних 3D-камер, і в цьому випадку сітка, утворена областями зображень, утворює решітку, яка відокремлює зображення одне від одного. Слід зазначити, що наявність такої решітки не є необхідною, навпроти, зображення можуть бути представлені в композиції без проміжків між ними. Композиція дозволяє здійснювати взаємне порівняння областей зображення, які представляють контейнер, що підлягає захвату, і управляти спредером так, щоб одержати взаємно симетричні області зображень. Особливо, що стосується функції допомоги водієві, на основі такої симетрії водієві легше виявляти й коректувати зсув спредера від необхідного положення. Крім того, при використанні автоматичного керування, коли замість водія спредером управляє, наприклад, комп'ютер (20), даний принцип дозволяє зменшити складність ресурсів, які необхідні для обробки сигналів зображень 3D-камер, і понизити складність алгоритмів, оскільки обробка сигналів зображень може бути зосереджена на певній області зображення 3Dкамери, і більше того - у середині композиції. На фіг. 5 і 6 контейнер, що підлягає переміщенню, уже приєднаний до спредера, і в цьому випадку на представлених композиціях (6) замість вищеописаного контейнера, що потрібно захопити, у середині композиції тепер видно частини областей зображень, які представляють контейнер (10), приєднаний до спредера, у той час як частини областей зображень, які перебувають поза частинами, що представляють приєднаний контейнер, розташовані на краях композиції. 8 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 Від об'єктів у поле зору 3D-камери, наприклад, контейнера (1), що підлягає захвату, контейнера (1’), що підлягає переносу, й/або від контейнера (1), що знаходиться під контейнером, що підлягає переносу, в області зображення 3D-камери формуються зони (10, 8), що відповідають зазначеним об'єктам. Може бути виконане розпізнавання різних зон, наприклад, на основі відстані (D), що вимірюється 3D-камерами (3). Відповідно до варіанта здійснення даного винаходу, наприклад, при захваті контейнера, як показано на фіг. 4, коли спредер (2) опускають у напрямку контейнера (1), здійснюється розпізнавання пікселів зони (8) зображення з області зображення 3D-камери, виміряна відстань (D) до якої менше встановленої порогової величини, наприклад, 1 м. Як говорилося вище, дані вимірів, що надходять від контейнерів, які можливо розташовані поруч із контейнером (1), наприклад, контейнерів сусіднього ряду, можуть бути відкинуті, як помилкові, завдяки наявності проміжку (30-50 см) між контейнерами. Далі, водієві контейнерної вантажопідйомної машини може бути показана сітка (6), утворена, наприклад, чотирма зображеннями (7) з камер, які формуються в масштабі реального часу, у яких присутні, наприклад, пофарбовані зони (пікселі) (8) області зображення, при цьому виявлений об'єкт (контейнер, який необхідно захопити) перебуває ближче певної відстані. Фахівцям у даній області має бути зрозуміло, що вимірювані значення відстаней, що надходять від об'єктів, що оточують контейнер, який необхідно захопити, і, наприклад, від землі, значно більше через наявність висоти контейнера (1), який необхідно захопити. Коли кути (8) контейнера, які видно на сітці (6), утворюють симетричну картину, спредер (2) перебуває в правильному положенні щодо контейнера (1), який підлягає захвату. Даний спосіб однаково придатний і при роботі з 20-футовими, і при роботі з 40-футовими контейнерами, оскільки, коли спредер розсовують або зсувають до необхідного розміру відповідно до контейнера, з яким він має працювати, 3D-камери залишаються в тому самому положенні стосовно контейнера. Якщо розглядати винятково тільки процес захвата контейнера, то число 3D-камер може бути скорочене до двох, оскільки цього буде досить для керування позицією спредера стосовно двох кутів контейнера: тоді два кути, що залишилися, автоматично займуть своє правильне положення. Щоб водій мав можливість при керуванні процесом використовувати симетрію зображень, найбільш вигідно розташовувати 3D-камери в діагональних кутах спредера. Відповідно до одного варіанта винаходу, наприклад, при захваті контейнера, як на фіг. 4, можна на основі пікселів (8) зображення, розпізнаних у полі (7) зображення, розрахувати чисельні значення бічного зсуву (х, у) і перекосу спредера щодо контейнера, який необхідно захопити. Це може бути виконано, наприклад, шляхом визначення комп'ютером (20) ширини (w) і висоти (h) прямокутної зони (8) у пікселях зображення. Коли здійснюється постійне визначення таких чисельних значень, переважно із частотою щонайменше 10 Гц, те виявляється можливим керування за допомогою комп'ютера (20) спредером (2) і постановка спредера в правильне положення і, в такий спосіб, автоматичне керування бічним зсувом (x, у) і перекосом спредера. Великою перевагою даного способу є те, що той самий датчик системи може бути використаний як для повністю автоматичної роботи без участі людини, так і для допомоги водієві. Відповідно до варіанта здійснення винаходу, карта відстаней використовується для керування спредером при операціях з одним або декількома контейнерами. Приклади операцій з контейнерами включають захват контейнера й установку контейнера, який підлягає переміщенню, на верх контейнера, що розташований нижче. Може бути реалізоване автоматичне керування, в цьому випадку спредером можна управляти без участі людини, наприклад, за допомогою комп'ютера (20), що передбачений у контейнерному вантажопідйомному пристрої, або шляхом дистанційного керування. Керування контейнером може полягати, наприклад, у керуванні контейнером (1’), який підлягає переміщенню, так щоб розташувати останній зверху іншого контейнера за допомогою спредера, й/або в захваті контейнера (1) за допомогою спредера. Спредер можна переміщати в обраній системі координат, наприклад, у системі координат контейнерного вантажопідйомного пристрою (14, 15), такого як кран. Коли спредер переміщають без підвішеного на ньому вантажу, то вантаж, з яким потрібно працювати (наприклад, контейнер, який необхідно захопити), рухається на карті відстаней. Коли спредер переносить вантаж, то вантаж, з яким необхідно працювати (наприклад, контейнер, який необхідно перемістити), залишається по суті нерухливим на карті відстаней. Коли здійснюється керування спредером, відповідні карти відстаней формуються за допомогою однієї або декількох 3D-камер, установлених на спредері. Спредер переміщають у площині зображення 3D-камери в напрямку глибини щодо площини зображення або в сполученні зазначених напрямків. Коли здійснюється формування множини карт відстаней, бажано, щоб площини зображення 3D-камер були паралельні одна одній. 9 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 Однак, через розгойдування спредера переміщення спредера може бути виявлено іншим способом у кожній карті відстаней. Відповідно до одного з варіантів здійснення винаходу, карту відстаней визначають у системі координат засобів захвата. У такому випадку відстані вимірюють щодо засобів захвата, причому осі системи координат, яка має використовуватися, нерухливі щодо засобів захвата. Сформована таким чином інформація про відстані, яку надає карта відстаней, може бути перетворена для нової системи координат з іншими осями, ніж осі системи координат засобів захвата. Це може бути корисним, коли, наприклад, на спредері використовують тільки одну або дві 3D-камери. У цьому випадку на карті відстаней нема картини, що відповідає всім кутам контейнера. Керування засобами захвата може здійснюватися в новій системі координат шляхом використання інформації про відстані, виміряні за допомогою карт відстаней на контейнері, що підлягає захвату й переносу, і/або на нижньому контейнері. Слід зазначити, що необов'язково, щоб карти відстаней всіх 3D-камер одночасно виявляли контейнер, з яким необхідно працювати, коли здійснюється перетворення інформації, що надається картами відстаней, для нової системи координат. Інформація про відстані, яку надає карта відстаней, що отримана за допомогою однієї 3D-камери, може бути перетворена для нової системи координат, при цьому положення зони (8, 10), що виявлена на карті відстаней, буде відомо в новій системі координат. Коли на карті відстаней іншої 3D-камери виявлено вантаж (10), з яким необхідно працювати, або об'єкт (8) поза зазначеним вантажем, інформація про відстані, надана цією іншою картою, може бути перетворена для нової системи координат. Коли використовують дві 3D-камери, зазначені камери можна встановити на зовнішніх кутах спредера, як говорилося вище. Переважно, щоб це були кути діагоналі або протилежні кути в поздовжньому напрямку спредера. Поздовжній напрямок на спредері можна визначити, як напрямок уздовж довжини спредера. Отже, завдяки використанню двох 3D-камер виявляється можливим визначати положення кутів контейнера й управляти спредером, наприклад, для захвата й штабелювання контейнерів. Аналогічно, коли контейнер, який підлягає переміщенню, перебуває в повітрі, поза контейнерами, які розташовані нижче, зона, яка відповідає контейнеру, який підлягає переміщенню, може бути розпізнана, коли відстань менше встановленої нижньої межі. Як говорилося раніше, нижня межа може являти собою порогову величину, що обмежена висотою контейнера, який підлягає переміщенню. Крім того, коли відбувається перевищення цієї порогової величини, можуть бути розпізнані об'єкти, що розташовані нижче контейнера, який підлягає переміщенню, наприклад, інші контейнери або інший контейнер. Фіг. 5 зображує пристрій за винаходом і його роботу після того як вантаж (1’) приєднаний до і засобів (2) захвата. У прикладі фіг. 5 вантажем є контейнер (I ), а засобами захвата є спредер (2), що є типовим для випадків, коли здійснюється захват і переміщення контейнерів. Зовнішні кути спредера оснащені 3D-камерами. Поле (4) зору 3D-камер містить у собі область (10), що відповідає тіньовій зоні (9), при цьому відстані, вимірювані 3D-камерою, обмежені висотою контейнера. Відстані, які необхідно вимірювати від тіньової зони, у такий спосіб вимірюються від поверхні контейнера, що підлягає переміщенню, наприклад, від його сторін (11). Контейнер, який підлягає переміщенню, не дозволяє 3D-камері бачити зону (9), розташовану під контейнером. 3D-камера формує область (7) зображення, у якій тіньова область (10) може бути відділена від вільних областей (12) поля зору 3D-камери, які лежать поза тіньовою областю. Тіньова область і інші області, що належать області зображення, можуть бути розпізнані так, як це було розглянуто вище. Пристрій, представлений на фіг. 5, дозволяє, після того як вантаж приєднаний до засобів захвата, визначити на карті відстаней область контейнера. Дана область утворює тіньову зону, усередині якої відстані, вимірювані 3D-камерою, обмежені висотою контейнера. Отже, положення контейнера, що підлягає переміщенню, може бути визначене в областях зображень 3D-камер, що дає можливість при роботі з контейнером, наприклад, при установці зверху іншого контейнера, переміщати даний контейнер, використовуючи розпізнану тіньову зону. Визначення тіньових зон переважно здійснювати так, щоб у полі зору 3D-камери перебував тільки контейнер, що підлягає переміщенню, при тому самому інтервалі висот, як на фіг. 5. Відповідно до одного приклада, 3D-камеру налаштовують на виявлення об'єктів, розташованих на відстані 3 м або менше. Для такий 3D-камери тіньові зони можуть бути визначені шляхом підйому контейнера на достатню висоту, щоб відстань від 3D-камери до контейнерів інших, ніж контейнер, що підлягає переміщенню, становила більше 3 м. Тіньова зона, що визначена в такий спосіб (наприклад, група пікселів зображення), тепер може бути збережена, наприклад, у пам'яті комп'ютера (20), щоб дати можливість, наприклад при штабелюванні контейнерів, для нижнього контейнера робити пошук тільки вільної зони (12) поля зору. 10 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 Відповідно до варіанта здійснення винаходу, керування контейнером, що підлягає переміщенню, здійснюють так, щоб у певному інтервалі висот області зображення кожної 3Dкамери була видна тільки область (10), що відповідає тіньовій зоні (9), яка була визначена. Якщо в області зображення, у певному інтервалі висот видні об'єкти інші, ніж тіньова область, рух можна зупинити. Рух зупиняють, зокрема, коли відстань (D) до об'єкта, виявленого в області зображення, менше висоти контейнера, при цьому переміщення контейнера в площині області зображення могло б привести до зіткнення з виявленим об'єктом. Відповідно до іншого прикладу, тіньова зона, що була визначена для 3D-камери, може бути використана для керування контейнером, що підлягає переміщенню, при штабелюванні контейнерів. У такому випадку контейнером (1’), який необхідно перемістити, управляють, щоб розташувати зверху іншого контейнера і опустити на цей контейнер. При штабелюванні контейнерів важливим є те, щоб при наближенні до нижнього контейнера (1) значення відстані (D1), що вимірюють від верхнього контейнера, і значення відстані (D2), що одержують від нижнього контейнера, могли розрізнятися одне від одного. Коли контейнер (1’), який установлюють у штабель, і нижній контейнер (1) зближаються, різниця зазначених значень відстаней зменшується до нуля, чого й вимагає завдання. Коли в області зображення 3Dкамери була визначена тіньова зона (10), і дана тіньова зона (10) була збережена, наприклад, у пам'яті комп'ютера (20), при визначенні положення нижнього контейнера (1) можна контролювати тільки область (12) поза тіньовою зоною (10), і не турбуватися, що переміщуваний контейнер буде переплутаний з нижнім контейнером. Відповідно до варіанта здійснення винаходу, тіньова зона (10), що була раніше визначена, використовується для захвата контейнера надалі. Тіньова зона (10) може бути визначена й збережена, наприклад, у пам'яті комп'ютера (20), коли контейнер (1) поміщають у штабель контейнерів. Коли пізніше знову потрібно виконати захват контейнера (1), збережена карта (10) відстаней може бути використана при керуванні спредером (2) і його розміщенні в правильне положення для захвата контейнера (1). Це дозволяє виміряну датчиком (3) карту відстаней порівнювати в реальному часі з картою (10) відстаней, що збережена в пам'яті, і здійснювати керування (або з боку водія, або від комп'ютера (20)) зазначеними картами відстаней так, щоб вони збіглися. Даний спосіб можна застосовувати, користуючись мінімум лише однією 3Dкамерою (3), коли по карті відстаней здійснюється визначення не тільки положення кута (21), що видимий на карті, але також напрямків сторін контейнера, що видимі на карті, щоб порівнювати перекіс контейнера (1) з картою (10) відстаней, що зберігається в пам'яті. Штабелювання контейнерів показане на фіг. 6. Фіг. 6 зображує пристрій за винаходом і його роботу при штабелюванні вантажу (1’). У прикладі фіг. 6 вантажем є контейнер (1’), а засобами захвата - спредер (2), що є типовим при роботі зі стандартними контейнерами. На зовнішніх кутах спредера встановлені 3D-камери. Ця установка може бути зроблена так, як було описано вище. Тоді 3D-камери (3) можуть бачити кути (5) нижнього контейнера (1), якщо й коли ці кути не закриті тінню (9), що відкидається верхнім контейнером (1’). Зона (8) області зображення, що відповідає нижньому контейнеру (1), може бути розпізнана, наприклад, на основі відстані (D), що вимірюється 3D-камерою, як було описано вище. Відповідно до одного приклада, зона, що належить нижньому контейнеру, може бути розпізнана, коли, наприклад, виміряна відстань D менше заданої нижньої межі, яка у цьому випадку більше висоти контейнера (1’), який необхідно переміщати. У такому випадку тіньову зону (10) можна ігнорувати, а контейнером можна управляти по взаємному співвідношенню зон (8), що відповідають нижнім контейнерам, і/або по співвідношенню зони (8), що відповідає нижньому контейнеру, і тіньової зони. Про співвідношення зазначених зон можна судити, порівнюючи зони одну з одною, наприклад, порівнюючи їхнє положення, розмір і/або один або декілька розмірів в області зображення 3Dкамери. Таким чином, при штабелюванні контейнерів, контейнером, який необхідно переносити, можна управляти так, щоб зони (8) зробити симетричними, і щоб зона (10) якнайкраще покривала зону (8), що відповідає нижньому контейнеру. У такому випадку, зона, що відповідає нижньому контейнеру, зрештою майже зникає в тіньовій зоні, коли контейнери виявляються сполученими один з одним. Як говорилося вище, відносний розмір зон (8) може також бути штучно збільшений графічно за допомогою комп'ютера (20), так щоб водієві було легше виявляти навіть невеликі відхилення положення між верхнім і нижнім контейнерами. Даний спосіб однаково придатний і при роботі з 20-футовими, і при роботі з 40-футовими контейнерами, оскільки, коли спредер розсовують або зсовують до необхідного розміру відповідно до контейнера, з яким потрібно працювати, 3D-камери залишаються в тому самому положенні стосовно контейнера. 11 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 Відповідно до одного варіанта здійснення винаходу, на основі розпізнаних зон (8) можна також розрахувати чисельні значення бічного зсуву (х, у) і перекосу верхнього контейнера щодо нижнього контейнера. Це може бути виконано, наприклад, шляхом визначення за допомогою комп'ютера (20) ширини (w) і висоти (h) сторін прямокутника або сторін L-образної ділянки (8) у пікселях зображення. Коли здійснюється безперервне визначення цих чисельних значень, переважно із частотою щонайменше 10 Гц, можна за допомогою комп'ютера (20) управляти спредером (2), установлюючи його в правильне положення і в такий спосіб здійснюючи автоматичне керування бічним зсувом (х, у) і перекосом спредера при штабелюванні контейнерів. Великою перевагою даного способу є те, що та сама система датчиків може бути використана й для повністю автоматичної роботи без участі людини, і також для допомоги водієві. Відповідно до одного варіанта здійснення винаходу, при штабелюванні контейнерів визначення перекосу між нижнім контейнером і контейнером, який необхідно переміщати, здійснюється на основі зони, що відповідає нижньому контейнеру, яку виявляє 3D-камера, і тіньової зони. Перекіс можна визначати, вимірюючи кут між сторонами тіньової зони й зони, що відповідає нижньому контейнеру. На основі вимірюваного кута можна управляти контейнером, який необхідно переміщати, так щоб кут між зонами став рівним нулю, після чого й перекіс стане нульовим. У такому випадку зазначені зони стають взаємно симетричними. На фіг. 6 зображена додаткова система датчиків (18, 19), що відповідає варіанту здійснення винаходу, який дозволяє при роботі з вантажем використовувати іншу систему координат для керування спредером додатково до системи координат 3D-камер. За рахунок використання більш ніж однієї системи координат, особливо, при штабелюванні контейнерів, число 3D-камер, установлюваних на спредер, може бути скорочено, наприклад, від чотирьох 3D-камер, установлюваних на кожному зовнішньому куті спредера, до двох камер. Інші системи координат можуть бути створені шляхом використання крім 3D-камер додаткових датчиків, які працюють у системі координат, що відрізняється від системи координат 3D-камер. Наприклад, системи координат додаткової системи датчиків і 3D-камер можуть мати різні осі. Ці різні осі можуть бути забезпечені шляхом вибору різних початкових точок відліку для кожної системи координат. На фіг. 6 додаткова система датчиків (18, 19) утворює вимірювальний пристрій, який вимірює положення х, у і перекіс спредера (2) відносно візка (15). Відповідно, спредер служить як початкові точки відліку систем координат 3D-камер, у той час як початковою точкою відліку системи координат вимірювального пристрою, реалізованого у вигляді додаткової системи датчиків, задано, наприклад, місце кріплення вимірювального пристрою, яким може служити візок (15). Вимірювальний пристрій може бути реалізований, наприклад, за допомогою двох інфрачервоних (14) джерел (18) світла, установлених на спредері, при цьому місця їхньої установки визначаються камерою (19), що встановлена на візку (15). Завдяки вимірювальному пристрою, число 3D-камер (3) може бути скорочено, зокрема, при штабелюванні контейнерів, від чотирьох до двох, оскільки, коли дві 3D-камери (3) бачать два кути нижнього контейнера (1), інформація щодо положення нижнього контейнера й перекосу тепер може бути визначена в системі координат візка (15), збережена в пам'яті комп'ютера (20), і верхній контейнер можна опускати на верх нижнього контейнера за допомогою системи датчиків (18, 19) і записаного в пам'ять положення нижнього контейнера. Крім того, не потрібно бачити два кути нижнього контейнера (1) одночасно. Фіг. 7 зображує спосіб реалізації керування спредером (2) на основі областей карт відстаней. Можна прикріпити до спредера механізм точного переміщення, що містить одну або декілька 3D-камер (3) і відтяжні троси. Механізм точного переміщення, зображений на фіг. 7, містить чотири відтяжних троси (відтяжний трос 1, відтяжний трос 2, відтяжний трос 3 і відтяжний трос 4), і 3D-камери (3), установлені на зовнішніх кутах спредера (2). 3D-камери (3) можуть бути встановлені так, як було описано вище. На основі карт відстаней, сформованих 3Dкамерами (3), здійснюється керування відтяжними тросами (17) для переміщення контейнера (1). У конструкції механізму точного переміщення, яка представлена на фіг. 7, окремі відтяжні троси (17) установлені в чотирьох кутах у середній частині спредера (2) поруч зі шківами (16) вантажопідйомних тросів. Верхні кінці відтяжних тросів прикріплені до візка (15) (фіг. 1), звідки можна управляти зусиллями, що прикладаються до відтяжних тросів, наприклад, за допомогою електромоторів. Якщо тепер необхідно перемістити спредер (2) у напрямку х, то збільшують зусилля на відтяжних тросах 1 і 2, і одночасно зменшують зусилля на відтяжних тросах 3 і 4. Якщо необхідно перемістити спредер (2) у напрямку у, то збільшують зусилля на відтяжних тросах 2 і 3, і одночасно зменшують зусилля на відтяжних тросах 1 і 4. Якщо необхідно створити перекіс спредера (2), наприклад, якщо в системі координат спредера необхідно створити 12 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 перекіс у напрямку проти годинникової стрілки, то збільшують зусилля на відтяжних тросах 2 і 4, і одночасно зменшують зусилля на відтяжних тросах 1 і 3. Згідно фіг. 7, управляти відтяжними тросами (17) можна автоматично за допомогою комп'ютера (20), наприклад, одним або декількома способами, які були описані для варіантів здійснення винаходу, розглянутих вище. Комп'ютер може бути з'єднаний з однією або декількома 3D-камерами (3) для прийому даних вимірів, наприклад, за допомогою електричних і/або оптичних сигналів. Крім того, комп'ютер може бути з'єднаний з додатковою системою датчиків (18, 19), що вимірює зсув однієї системи координат щодо іншої. Фіг. 8 зображує блок-схему алгоритму здійснення способу штабелювання вантажу, що відповідає варіанту здійснення винаходу. Далі спосіб буде роз'яснений на прикладі, у якому здійснюється захват і переміщення контейнера спредером, і який одночасно відноситься до варіантів здійснення винаходу, що показані на фіг. 1-7, причому посилальні (позиційні) номера в прикладі використовуються ті самі, що й на фіг. 1-7. Алгоритм починає роботу на кроці 802, як тільки контейнер виявляється приєднаним до спредера. Дана ситуація зображена на фіг. 5. Тоді на спредері встановлені одна або декілька 3D-камер, щоб сформувати відповідні карти відстаней. На кроці 804 здійснюється визначення тіньової зони карт відстаней 3D-камер. Карти відстаней можна визначати для кожної з 3D-камер окремо або для всіх камер одночасно. Далі, робота алгоритму буде розглянута у відношенні однієї карти відстаней. Визначення карти відстаней може містити в собі розпізнавання області, яку закриває собою контейнер, який необхідно переміщувати. У цій області відстані, які відповідають точкам зображення карти відстаней, обмежені висотою контейнера, який підлягає переміщенню, наприклад, границя обмеження дещо перевищує висоту контейнера, який підлягає переміщенню. Отже, видимість об'єктів (9), розташованих під контейнером у межах області (10) заблокована, і ця область утворює, таким чином, тіньову зону (10). Відповідно до варіанта здійснення винаходу, визначення тіньової зони здійснюється, коли контейнер піднятий у повітря, переважно на висоту, при якій відстань між переміщуваним контейнером і об'єктами, що знаходяться нижче, більше, ніж задана дистанція виявлення 3Dкамери. Отже, зони (12), що розташовані поза тіньовою зоною 3D-камери, є порожніми, і тіньова зона може бути легко визначена. Відповідно до варіанта здійснення винаходу, визначення тіньової зони здійснюється відповідно до характеристик контейнера, який підлягає переміщенню. Характеристики контейнера, який необхідно переміщати, можуть являти собою заздалегідь відомі характеристики, коли відомий, наприклад, розмір цього контейнера, наприклад, висота. У такому випадку, тіньова зона може бути визначена на карті відстаней, як зона, утворена точками карти, відповідні відстані до яких обмежені висотою контейнера, який підлягає переміщенню. Отже, область, що залишається поза тіньовою зоною, може бути визначена, як область, що створена точками карти, відповідні відстані до яких перевершують висоту контейнера, який підлягає переміщенню. Контейнер, який підлягає переміщенню, на кроці 806 установлюють на верх іншого контейнера (1). Це може бути виконане так, як показано на фіг. 6. При такій установці контейнера (1’) краще контролювати тільки частину карти відстаней поза тіньовою зоною. Оскільки при переносі контейнера тіньова зона залишається по суті незмінною, якщо зосередитися на контролі нижнього контейнера по області, що лежить поза тіньовою зоною, можна уникнути небезпеки сплутати результати контролю з переміщуваним контейнером (1’), при цьому можна задіяти наявну обчислювальну потужність для обробки інформації, яку одержують від карт відстаней, щоб використовувати цю інформацію для контролю мінливої частини карти. Алгоритм завершує роботу на кроці 808, і контейнер тепер готовий до установки на штабель. Після установки контейнера на штабель, спредер можна від'єднати, і процес переходить далі - до роботи з наступним контейнером, наприклад, до захвата контейнера, і алгоритм може виконуватися заново. Фіг. 9 зображує блок-схему алгоритму здійснення способу роботи з вантажем, коли керування вантажем здійснюється на основі карти відстаней, що створена в системі координат крана (14, 15) і в системі координат спредера відповідно до варіанта здійснення даного винаходу. Далі спосіб буде розглянутий на прикладі, у якому здійснюється захват і переміщення контейнера спредером, і який одночасно відноситься до варіантів здійснення винаходу, що показані на фіг. 1-7, причому посилальні (позиційні) номера в прикладі використовуються ті самі, що й на фіг. 1-7. Спредер може бути частиною контейнерного вантажопідйомного пристрою, наприклад, козлового крана. Перевага використання системи додаткових датчиків (18, 19) полягає в тому, що число 3D-камер, необхідних на спредері для контролю контейнерів, з якими 13 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 необхідно працювати, може бути скорочено, зокрема, коли здійснюється штабелювання контейнерів. Спосіб містить захват контейнера й/або установку захопленого контейнера на верх іншого контейнера шляхом використання двох 3D-камер, установлених у поздовжньому напрямку на різних сторонах спредера, наприклад, у протилежних зовнішніх кутах спредера по довжині або по діагоналі, а також використання додаткової системи датчиків для визначення положення спредера, як показано на фіг. 6. Алгоритм починає роботу на кроці 902, коли спредер (2) визначає карти відстаней за допомогою 3D-камер. На кроках 904 і 906 3D-камери (3) спредера виявляють кути (21) контейнера, що розташований під спредером. Процеси виявлення можуть відбуватися окремо або одночасно. Інформація, що міститься в точках карти відстаней, перетворюється за допомогою системи додаткових датчиків (18, 19) для іншої системи координат, наприклад, для системи координат крана (14, 15), і зберігається в пам'яті. Таким чином, місця розташування виявлених кутів (21) контейнера, що знаходиться нижче, представляються в системі координат крана, за рахунок чого положення контейнера під спредером стає доступним для керування спредером. На кроці 908 може бути здійснене керування спредером і/або спредером з підвішеним на ньому контейнером з метою їхнього переміщення у місце розташування кутів нижчестоящого контейнера в системі координат крана. Коли використовується система додаткових датчиків (18, 19), горизонтальні координати (х, у) будь-якої обраної точки спредера (2) можуть бути визначені відносно крана (14, 15). Можна, наприклад, визначити положення датчиків (3) або положення кутів (22) контейнера (1’), який підлягає переміщенню, або положення зовнішнього кута (22) спредера, що звичайно відповідає положенню кута контейнера, який підлягає переміщенню. Алгоритм завершує роботу на кроці 910, коли завершене керування спредером з метою розміщення спредера на верх нижчестоящого контейнера, що дозволяє здійснити захват контейнера, і/або завершене керування контейнером, який підлягає переміщенню, з метою постановки останнього на верх нижчестоящого контейнера, що дозволяє зробити штабелювання контейнерів. Коли використовується система додаткових датчиків (18, 19), горизонтальні координати (х, у) будь-якої точки карти відстаней спредера (2) можуть бути визначені (на кроках 904, 906) відносно крана (14, 15). У такому випадку, наприклад, при штабелюванні контейнерів, координати (x_corner, y_corner) положення кута (21) нижнього контейнера (1), виявленого датчиком (3), перетворюються в координати (x_corner_lower container, y_corner_ lower container) для системи координат крана (14, 15), наприклад, за допомогою наступних формул: x_corner_lower container = x_sensor + cos(skew) x_corner + sin (skew) у_corner, (1) y_corner_lower container = y_sensor + cos(skew) y_corner - sin (skew) x_corner де (x_sensor, y_sensor) - координати горизонтального положення датчика (3), які визначені вимірювальними пристроями (18, 19) відносно крана (14, 15), а змінна (skew) - перекіс спредера (2), що визначений вимірювальними пристроями (18, 19) відносно крана (14, 15). Координати (x_corner_lower container, y_corner_ lower container) зберігаються в пам'яті комп'ютера (20). Після того, як координати щонайменше двох різних кутів будуть збережені в пам'яті комп'ютера (2), верхній контейнер (1') може бути потім на кроці 908 сполучений з верхом нижнього контейнера (1). Бічним положенням спредера (2) можна цілеспрямовано управляти за допомогою комп'ютера (20), так щоб можна було гарантовано виявити будь-які два необхідних кути нижнього контейнера (1). Інакше кажучи, комп'ютерне керування необхідно для забезпечення того, щоб необхідні два кути нижнього контейнера (1) не були суцільно закриті верхнім контейнером (1'). Сполучення може бути виконане так, щоб верхній контейнер (1'), наприклад, за допомогою керування від комп'ютера (20) був накладений на зазначені щонайменше два кути контейнера (1): x_corner_spr -> x_corner_lower container (2) y_corner_spr -> y_corner_lower container де (x_corner_spr, y_corner_spr) - координати горизонтального положення кута (22) контейнера (1'), який підлягає переміщенню, які визначені вимірювальними пристроями (18, 19) відносно крана (14, 15), а змінна (skew) - перекіс спредера (2), що визначений вимірювальними пристроями (18, 19) відносно крана (14, 15). У такому випадку, кут спредера (і верхнього контейнера) точно накладається поверх нижнього контейнера. З іншого боку, при захваті контейнера координати (x_corner_spr, y_corner_spr) представляють горизонтальне положення зовнішнього кута (22) спредера, яке визначено вимірювальними пристроями (18, 19) відносно крана (14, 15). На фіг. 10 зображений блок для здійснення пристроїв, що відповідають варіантам даного винаходу. Блок 1000 на фіг. 10 містить процесорний пристрій 1008, пам'ять 1010 і засоби 1002 14 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 з'єднання. Засоби 1002 з'єднання служать для приєднання одного або декількох датчиків, наприклад, 3D-камер, до блоку. Засоби з'єднання можуть містити пристрій 1004 прийому даних і пристрій 1006 передачі даних. Через пристрій прийому даних може бути прийнята інформація від 3D-камери, наприклад, пікселі зображення, що виміряні за допомогою 3D-камери. Через пристрій передачі даних можуть бути передані дані карти або карт відстаней, які сформовані в блоці, наприклад, передані пристрою, що відповідає за керування краном або засобами захвата. Всі пристрої блоку електрично з'єднані один з одним. Пам'ять може містити одну або декілька програм, які можуть бути виконані процесорним пристроєм. Процесорний пристрій може працювати під керуванням програмних інструкцій, що зберігаються в пам'яті, і будувати карту відстаней на основі інформації, одержуваної від 3D-камери. Відповідно до варіанта здійснення винаходу, блок 1000 може використовувати сформовані карти відстаней для керування краном і/або його засобами захвата. У такому випадку блок 1000 може являти собою, наприклад, керуючий пристрій вантажопідйомного механізму, наприклад, крана, що з'єднаний з датчиками, такими як одна або декілька 3D-камер і/або з додатковими датчиками. Відповідно до варіанта здійснення винаходу, блок 1000 може передавати сформовані в ньому карти відстаней іншому пристрою, що, відповідає за керування засобами захвата, наприклад, керуючому пристрою вантажопідйомного механізму, такого як кран. Тоді зазначений блок легко реалізувати, і його можна встановлювати разом з одним або декількома датчиками, наприклад, 3D-камерами й/або додатковими датчиками в крани, які вже перебувають в експлуатації. Це дозволяє модернізувати вже існуючі крани, впроваджуючи в них технічні рішення, що відповідають даному винаходу. Відповідно до варіанта здійснення винаходу, зазначені засоби з'єднання містять дисплей. Дисплей дозволяє контролювати роботу одного або декількох вантажопідйомних механізмів. На дисплеї можуть бути відображені одна або декілька карт відстаней, наприклад, сімейство (6), утворене картами відстаней. Дисплей, наприклад, рідкокристалічний (PK) дисплей, може служити як передавальний пристрій, що належить засобам з'єднання, при цьому дисплей використовується для передачі сигналу зображення, щоб продемонструвати карти відстаней, наприклад, водієві, операторові, що здійснює дистанційне керування вантажопідйомними механізмами, або операторові, що контролює автоматизовану обробку вантажів. Дисплей може також служити і як передавальний пристрій, і як прийомний пристрій, що належить засобам з'єднання, при цьому додатково до вищезгаданих функцій є можливість приймати інформацію й/або інструкції, наприклад, інструкції для керування вантажопідйомним механізмом і/або інструкції з обробки зображень для їхньої модифікації, наприклад, збільшення або зменшення сімейства карт відстаней. Такий дисплей може містити, наприклад, сенсорний екран. Процесорний пристрій може управляти дисплеєм відповідно до інструкцій і/або командами, що зберігаються в пам'яті, щоб реалізувати вищеописані функції. Процесорний пристрій може містити набір регістрів, арифметико-логічний пристрій і пристрій керування. Пристрій керування управляється за допомогою послідовності програмних інструкцій, які передаються в процесорний пристрій з пам'яті. Пристрій керування може містити численні мікроінструкції для реалізації базових функцій. Виконання мікроінструкцій може змінюватися залежно від конфігурації процесорного пристрою. Програмні інструкції можуть являти собою код мовою програмування, причому це може бути мова програмування високого рівня, така як C, Java і т.п., або мова програмування низького рівня, така як машинна мова або асемблер. Пам'ять може бути енергозалежною або енергонезалежною, наприклад, це може бути EEPROM, ROM, PROM, RAM, DRAM, SRAM, мікропрограмна пам'ять, програмувальна логіка й т.п. Комп'ютерна програма може бути у форматі вихідного коду, об'єктного коду або в якомунебудь проміжному форматі, і вона може зберігатися в передавальному середовищі, яке може являти собою будь-яку структуру або пристрій, що здатні зберігати програму. До такого передавального середовища можна, наприклад, віднести середовище зберігання, пам'ять комп'ютера, ПЗП, електричну хвилю передачі радіосигналу, сигнал обміну даними, програмний дистрибутивний пакет. Блок 1000 і його компоненти можуть бути реалізовані у вигляді однієї або декількох інтегральних схем, таких як спеціалізовані інтегральні мікросхеми ASIC (Application Specific Integrated Circuit). Можливі також і інші способи реалізації, наприклад, у вигляді схеми, що виконана на окремих логічних елементах. Можливі також і сполучення різних способів реалізації. Прикладом схеми, що виконана на логічних елементах, може служити програмувальна користувачем вентильна матриця FPGA (Field Programmable Gate Array). 15 UA 114641 C2 5 10 15 20 25 30 35 Відповідно до варіанта здійснення винаходу, вантажопідйомний механізм, такий як кран або контейнерний вантажопідйомний пристрій, наприклад, козловий кран або контейнеровознавантажувач, може бути піддані модернізації, відповідно до якої в системі координат крана й засобів захвата може бути визначена карта відстаней, в області якої зображується частина поверхні вантажу, до якого прикріплюються засоби захвата й/або на який ставиться інший вантаж, а також зображуються об'єкти навколо вантажу. Модернізація може бути здійснена шляхом оснащення засобів захвата однією або декількома 3D-камерами, як це було розглянуто вище. З іншого боку, якщо потрібно використовувати менше число 3D-камер, то на вантажопідйомний механізм можна встановити 3D-камери й додаткові датчики, як показано на фіг. 6. Додатково до установки згаданих пристроїв модернізація також може включати відновлення програмного забезпечення. Програмне забезпечення може містити в собі, наприклад, комп'ютерну програму, яка може зберігатися в пам'яті вантажопідйомного механізму і яка може виконуватися при роботі з вантажем. Модернізація може також полягати тільки в інсталяції програмного забезпечення, якщо вантажопідйомний механізм уже оснащений засобами для формування карт відстаней. Даний винахід може бути застосовний до будь-яких пристроїв для роботи з вантажами: до вантажопідйомних механізмів, кранів, контейнерних вантажопідйомних пристроїв, козлових кранів, контейнеровозів-навантажувачів, мостових кранів, портових кранів або до будь-якого сполучення різних пристроїв, оснащених засобами захвата для прикріплення до вантажу. Пристрої для роботи з вантажами, такі як вантажопідйомні механізми, крани, контейнерні вантажопідйомні пристрої, козлові крани, контейнеровози-навантажувачі, мостові крани, портові крани, у яких реалізується функціональність відповідно до розглянутих вище варіантів здійснення винаходу, містять не тільки засоби, що відповідають існуючому рівню техніки, але також і засоби формування для засобів захвата карти відстаней, в області якої зображується частина поверхні вантажу, до якого прикріплюються засоби захвата й/або на який ставиться інший вантаж, а також зображуються об'єкти навколо вантажу. Більш конкретно, зазначені пристрої можуть містити засоби для реалізації функціональності пристрою, розглянутої у вищеописаному варіанті здійснення винаходу; при цьому вони можуть містити окремі засоби для кожної окремої функції, або ж зазначені засоби можуть бути організовані так, щоб виконувати дві або декілька функцій. Відомі пристрої містять процесори й пам'ять, які можуть бути використані для здійснення однієї або декількох функцій, розглянутих у вищеописаних варіантах здійснення винаходу. Для фахівців у даній області має бути зрозуміло, що пристрої, представлені в розглянутих вище варіантах здійснення, можуть також містити частини інші, ніж ті, що були описані вище, які не мають відношення до винаходу і які були опущені для більшої ясності викладу. Для фахівців у даній області має бути зрозуміло, що в міру розвитку технології основну ідею винаходу можна буде реалізувати багатьма іншими способами. Таким чином, винахід і варіанти його здійснення не обмежені розглянутими вище прикладами і можуть змінюватися в рамках обсягу винаходу, що встановлений пунктами формули винаходу. 40 ФОРМУЛА ВИНАХОДУ 45 50 55 60 1. Спосіб підйому й переміщення вантажу за допомогою вантажопідйомного механізму, що містить засоби захвата для захоплювання щонайменше однієї точки кріплення вантажу, який містить: забезпечення в засобах захвата карти відстаней, яка включає множину точок, кожна з яких асоційована з інформацією про відстань, і в області якої відображена частина області вантажу, до якого прикріплюють засоби захвата й/або на який ставлять інший вантаж, а також відображені об'єкти навколо вантажу, забезпечення множини карт відстаней, які описують різні області вантажів, в яких знаходяться точки кріплення або точки штабелювання, формування групи карт відстаней, у якій частини карт відстаней, що містять вантажі, які підлягають обробці, відділені одна від іншої і від об'єктів, які їх оточують, керування засобами захвата на підставі форм областей з карт відстаней, що задаються вантажами. 2. Спосіб за п. 1, який містить наступні етапи: визначають на карті відстаней першу область вантажу, який підлягає підйому й переміщенню, коли вантаж прикріплений до засобів захвата, визначають на карті відстаней другу область вантажу, який підлягає підйому й переміщенню, коли вантаж від'єднаний від засобів захвата, 16 UA 114641 C2 5 10 15 20 25 30 35 40 45 50 55 60 визначають різницю між першою областю й другою областю, і управляють засобами захвата на підставі зазначеної різниці. 3. Спосіб за будь-яким із попередніх пунктів, який містить наступні етапи: визначають на карті відстаней першу область вантажу, який підлягає підйому й переміщенню, коли вантаж прикріплений до засобів захвата, визначають на карті відстаней другу область вантажу, визначають різницю між областями вантажу на карті відстаней, управляють засобами захвата на підставі зазначеної різниці між областями вантажу. 4. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить забезпечення карти відстаней у системі координат засобів захвата, і перетворення даних про відстань із зазначеної карти для нової системи координат, осі якої відрізняються від осей системи координат засобів захвата, і керування засобами захвата в новій системі координат. 5. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить керування засобами захвата, що включає переміщення засобів захвата в площині, яка перпендикулярна напрямку відстані в карті відстаней, або в напрямку глибини, тобто в напрямку відстані в карті відстаней, або в змішаному напрямку. 6. Спосіб за кожним із попередніх пунктів, який відрізняється тим, що містить забезпечення множини карт відстаней, і керування засобами захвата на підставі симетрії зазначених карт відстаней. 7. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить обробку вантажу, яка включає в себе підйом вантажу й/або установку зазначеного вантажу зверху іншого вантажу. 8. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить керування засобами захвата для закріплення вантажу й/або для установки зазначеного вантажу зверху іншого вантажу. 9. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить забезпечення карти відстаней у площині, у напрямку якої здійснюють керування вантажем, при цьому карта відстаней містить відстані в напрямку, перпендикулярному зазначеній площині. 10. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що карта відстаней містить у собі область зображення, яка містить точки зображення, що включають одне або більше з наступного: інформацію про відстань, інформацію про інтенсивність світла, і колірну інформацію. 11. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить прикріплення вантажу до засобів захвата, при цьому карта відстаней містить область зображення, яка включає частину вантажу, що прикріплюється. 12. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить прикріплення вантажу до засобів захвата, при цьому частину карти відстаней, що перекривається вантажем, задають під час підйому вантажу, щоб відокремити її від інших вантажів і зберегти, наприклад, у пам'яті комп'ютера. 13. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить прикріплення вантажу до засобів захвата, при цьому збережену в пам'яті частину карти відстаней, що перекривається вантажем, ігнорують під час контролю інших вантажів. 14. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що засоби захвата містять спредер, що включає до себе, наприклад, один або декілька поворотних замків для прикріплення до литих куточків контейнера. 15. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що вантаж містить контейнер, при цьому карта відстаней визначає місця розташування контейнера, який розташований в штабелі контейнерів, або контейнера, який підлягає переносу, або в обох випадках, відносно засобів захвата. 16. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що засоби захвата містять спредер, причому один або декілька з його зовнішніх кутів, наприклад, два протилежних по довжині або по діагоналі кута, або всі зовнішні кути оснащені датчиком, що замірює карту відстаней. 17. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить демонстрацію карти відстаней водієві вантажопідйомного механізму, щоб допомагати водієві при піднятті й/або штабелюванні вантажу. 18. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить модифікацію карти відстаней за допомогою обробки зображення, щоб краще допомагати водієві при піднятті й/або штабелюванні вантажу. 17 UA 114641 C2 5 10 15 20 19. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить введення карти відстаней у комп'ютер для забезпечення автоматичного підняття й/або штабелювання вантажу під управлінням комп'ютера. 20. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить неодночасне визначення положення щонайменше двох областей вантажу, який підлягає обробці, при цьому положення зазначених областей зберігають у пам'яті, щоб визначати місце розташування й перекіс вантажу. 21. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що містить задання карти відстаней у полі зору, що містить кут контейнера, який підлягає переносу, причому зазначений кут містить точку кріплення для засобів захвата. 22. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що вантажопідйомний механізм містить вантажопідйомний пристрій, наприклад піднімальний пристрій для контейнерів, такий як козловий кран або контейнеровоз-навантажувач. 23. Спосіб за будь-яким із попередніх пунктів, який відрізняється тим, що для задання карти відстаней містить застосування 3D-камери, такої як камера, що вимірює час поширення світла, наприклад, часопролітна камера. 24. Пристрій, що містить засоби для здійснення способу за будь-яким із пп. 1-23. 25. Машинозчитуваний носій, на якому записано комп'ютерну програму, якою оснащений пристрій вантажопідйомного механізму, що здійснює спосіб за будь-яким із пп. 1-23. 26. Спосіб модернізації вантажопідйомного механізму, що містить установку в засобі підйому й переміщення вантажів пристрою за п. 24 або машинозчитуваного носія за п. 25. 18 UA 114641 C2 19 UA 114641 C2 20 UA 114641 C2 21 UA 114641 C2 22 UA 114641 C2 23 UA 114641 C2 Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 24
ДивитисяДодаткова інформація
Автори англійськоюRintanen, Kari
Автори російськоюРинтанен Кари
МПК / Мітки
МПК: B66C 13/46, G01S 17/87, G01S 17/08, G01S 17/89, B66C 13/00, G06T 7/593
Мітки: спосіб, пристрій, вантажу, підйому, переміщення
Код посилання
<a href="https://ua.patents.su/26-114641-sposib-i-pristrijj-dlya-pidjjomu-jj-peremishhennya-vantazhu.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для підйому й переміщення вантажу</a>
Пристрій для керування механізмом підйому вантажу прольотного крана

Номер патенту: 85764
Опубліковано: 25.11.2013
Автори: Годун Василь Анатолійович, Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B66C 13/22
Мітки: пристрій, крана, керування, підйому, прольотного, вантажу, механізмом
Формула / Реферат:
Пристрій для керування механізмом підйому вантажу прольотного крана, що містить датчик стану каната, задатчик, мікроконтроллер, на входи якого підключені задатчик та датчик стану каната, який відрізняється тим, що додатково обладнаний перетворювачем частоти, який інформаційним каналом підключений до мікроконтроллера і живить асинхронний короткозамкнений двигун механізму підйому вантажу.
Спосіб підйому вантажу
Номер патенту: 39406
Опубліковано: 25.02.2009
Автори: Тимофєєв Микола Іванович, Воронко Андрій Анатолійович, Сорокопуд Іван Олександрович
МПК: G01M 19/00
Мітки: підйому, вантажу, спосіб
Формула / Реферат:
Спосіб підйому вантажу, що включає процеси з розміщення вантажу, запобігання його від падіння, прикладання зусиль, збереження стійкості системи, який відрізняється тим, що додатково систему піддають вібрації, змушеним коливанням уздовж похилої осі лотку, переміщують вантаж вверх по гвинтовому шляху.
Спосіб керування електродвигуном механізму підйому вантажу мостового крана
Номер патенту: 85763
Опубліковано: 25.11.2013
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович, Годун Василь Анатолійович
МПК: B66C 13/22
Мітки: керування, підйому, механізму, спосіб, мостового, крана, електродвигуном, вантажу
Формула / Реферат:
Спосіб керування електродвигуном механізму підйому вантажу мостового крана, при якому рух механізму підйому вантажу виконують за неперервною функцією від аргументу часу з усуненням коливань вантажу у кінці перехідного процесу, який відрізняється тим, що рух електродвигуна механізму підйому вантажу розділений на три етапи: на першому - електродвигун розганяють і він певний час обертається на посадочній швидкості; на другому - виконують розгін...
Пристрій для підвішування і переміщення вантажу відносно опорної і підстеляючої поверхонь
Номер патенту: 89112
Опубліковано: 25.12.2009
Автори: Дубинський Ігор Миколайович, Дубінскій Андрєй Ігорєвіч
МПК: B65G 7/00
Мітки: пристрій, підстеляючої, опорної, вантажу, відносної, поверхонь, підвішування, переміщення
Формула / Реферат:
1. Пристрій для підвішування і переміщення вантажу відносно опорної і підстеляючої поверхонь, що містить опору з опорною поверхнею, встановлену на підстеляючу поверхню, герметичну робочу порожнину, обмежену еластичною бічною поверхнею, яка жорстко сполучена своєю верхньою основою з опорною поверхнею, а нижньою основою - з переміщуваним навантаженням, системи напуску і вакуумного відкачування робочого середовища з робочої порожнини, який...
Пристрій для підвішування і переміщення вантажу відносно опорної і підстилкової поверхонь
Номер патенту: 34991
Опубліковано: 26.08.2008
Автори: Дубінскій Андрєй Ігорєвіч, Дубинський Ігор Миколайович
МПК: B65G 7/00
Мітки: вантажу, пристрій, переміщення, опорної, відносної, підвішування, підстилкової, поверхонь
Формула / Реферат:
1. Пристрій для підвішування і переміщення вантажу відносно опорної і підстилкової поверхонь, що містить опору з опорною поверхнею, встановлену на підстилкову поверхню, герметичну робочу порожнину, обмежену еластичною бічною поверхнею, яка жорстко сполучена своєю верхньою основою з опорною поверхнею, а нижньою основою - з переміщуваним навантаженням, системи напуску і вакуумного відкачування робочого середовища з робочої порожнини, який...
Попередній патент: Тара з клейкою етикеткою
Наступний патент: Універсальний ротор оніпка
Випадковий патент: Спосіб для вимірювання нерівномірності розподілу електромагнітного поля в мікрохвильовій печі та пристрій для його здійснення