Спосіб керування електродвигуном механізму підйому вантажу мостового крана
Номер патенту: 85763
Опубліковано: 25.11.2013
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович, Годун Василь Анатолійович

Формула / Реферат
Спосіб керування електродвигуном механізму підйому вантажу мостового крана, при якому рух механізму підйому вантажу виконують за неперервною функцією від аргументу часу з усуненням коливань вантажу у кінці перехідного процесу, який відрізняється тим, що рух електродвигуна механізму підйому вантажу розділений на три етапи: на першому - електродвигун розганяють і він певний час обертається на посадочній швидкості; на другому - виконують розгін електродвигуна до усталеної швидкості та рух електродвигуна на усталеній швидкості, причому зміну кутової швидкості двигуна виконують за законом:
![]() ,
,
де ![]() - маса вантажу;
- маса вантажу; ![]() - тривалість розгону електродвигуна до усталеної швидкості;
- тривалість розгону електродвигуна до усталеної швидкості; ![]() - усталена швидкість руху електродвигуна;
- усталена швидкість руху електродвигуна; ![]() - посадочна швидкість руху електродвигуна;
- посадочна швидкість руху електродвигуна; ![]() - поточний час;
- поточний час; ![]() - приведена жорсткість канату; на третьому етапі здійснюють гальмування електродвигуна до зупинки та накладання гальма, причому зміну кутової швидкості двигуна виконують за законом:
- приведена жорсткість канату; на третьому етапі здійснюють гальмування електродвигуна до зупинки та накладання гальма, причому зміну кутової швидкості двигуна виконують за законом:
![]() ,
,
де ![]() - тривалість гальмування електродвигуна до повної зупинки.
- тривалість гальмування електродвигуна до повної зупинки.
Текст
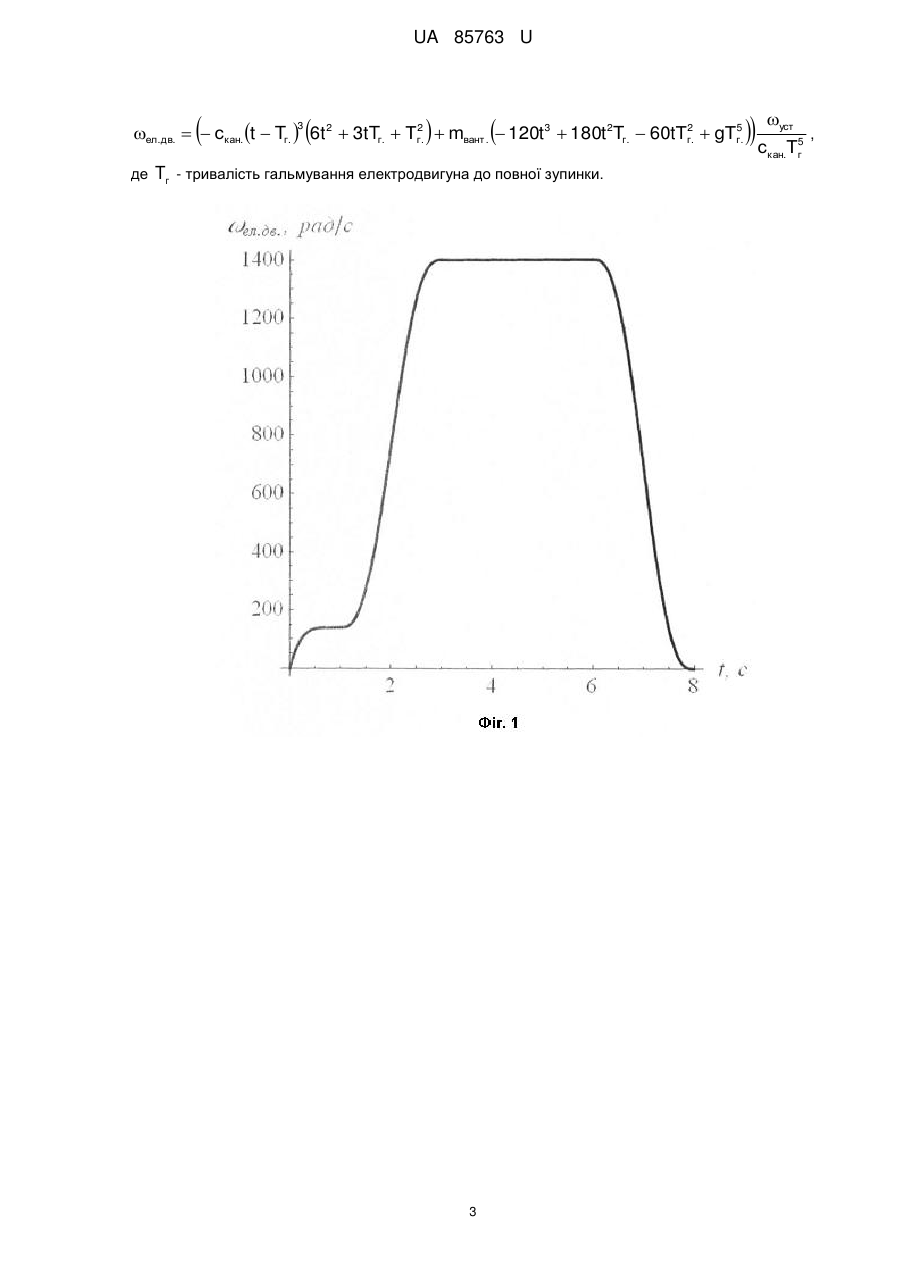
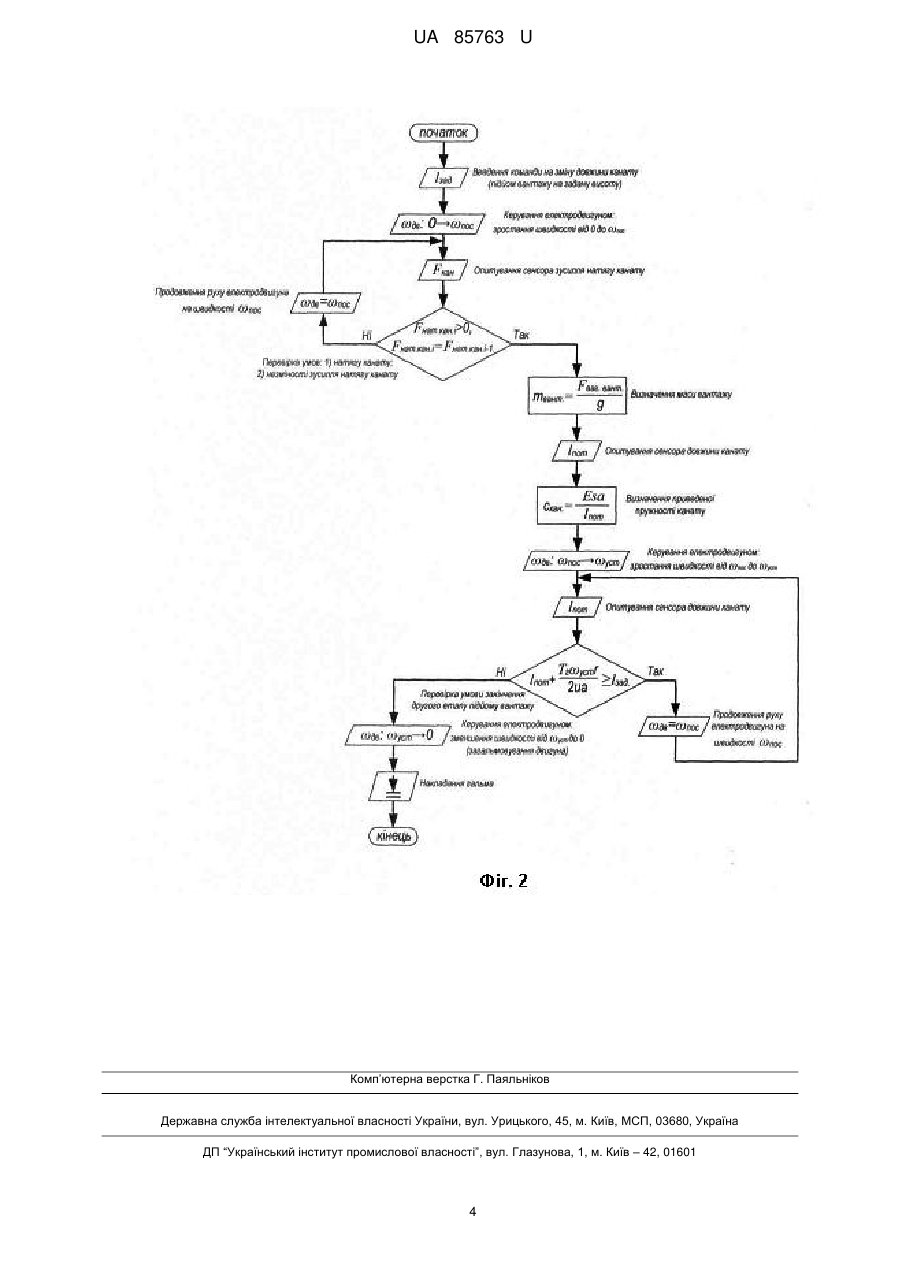
Реферат: Спосіб керування електродвигуном механізму підйому вантажу мостового крана, при якому рух механізму підйому вантажу виконують за неперервною функцією від аргументу часу з усуненням коливань вантажу у кінці перехідного процесу. Рух електродвигуна механізму підйому вантажу розділений на три етапи: на першому - електродвигун розганяють і він певний час обертається на посадочній швидкості; на другому - виконують розгін електродвигуна до усталеної швидкості та рух електродвигуна на усталеній швидкості, причому зміну кутової швидкості двигуна виконують за законом: 10 t T ел.дв. ( 60mвант .t 2t 2 3tT T 2 пос уст с кан. (Т 5пос 15 t 4T пос уст 6t 5 уст пос де m вант . - маса вантажу; 3 2 уст 1 пос ))c кан.Т 5 , T - тривалість розгону електродвигуна до усталеної швидкості; уст - усталена швидкість руху електродвигуна; пос - посадочна швидкість руху електродвигуна; t - поточний час; с кан. - приведена жорсткість канату; на третьому етапі здійснюють гальмування електродвигуна до зупинки та накладання гальма, причому зміну кутової швидкості двигуна виконують за законом: 2 2 5 ел.дв. скан. t Tг. 6t 2 3tTг. Тг. mвант . 120t3 180t 2Tг. 60tТг. gТг. 3 с Т уст кан. , де Tг - тривалість гальмування електродвигуна до повної зупинки. 5 г UA 85763 U (54) СПОСІБ КЕРУВАННЯ ЕЛЕКТРОДВИГУНОМ МЕХАНІЗМУ ПІДЙОМУ ВАНТАЖУ МОСТОВОГО КРАНА UA 85763 U UA 85763 U 5 10 15 20 25 30 35 Корисна модель належить до галузі підйомно-транспорного машинобудування, зокрема до способів керування електродвигуном змінного струму механізму підйому вантажу мостових кранів. Відомий спосіб керування рухом вантажу у вертикальному напрямку [Ловейкін B.C. Комплексний синтез оптимального керування рухом вантажопідйомного крана / Ловейкін B.C., Ромасевич Ю.О. // Автоматизація виробничих процесів у машинобудуванні та приладобудуванні. № 45.-2011. - С. 385-399.], який дозволяє усунути його коливання у кінці перехідного процесу, а сам рух вантажу і механізму підйому описується неперервними функціями від аргументу часу. Недоліком способу є те, що він може використовуватись лише при попередньому навантаженні канату силою ваги вантажу. У протилежному випадку застосування цього способу викликає перевантаження електродвигуна механізму підйому вантажу мостового крана та небажані коливання вантажу у вертикальному напрямку, що знижує надійність та довговічність канатів. В основу корисної моделі поставлена задача унеможливити перевантаження електродвигуна механізму підйому вантажу мостового крана та підвищити надійність канатів мостового крана за рахунок зменшення динамічних коливних навантажень, які діють на канати, при підйомі вантажу "з підхватом". Поставлена задача вирішується тим, що рух електродвигуна механізму підйому вантажу розділений на три етапи: на першому етапі електродвигун розганяється і певний час обертається на посадочній швидкості (при цьому виконується вибір слабини канату, його натяг та підйом вантажу на невелику висоту); на другому етапі виконується розгін електродвигуна до усталеної швидкості за певним законом та рух на усталеній швидкості; на третьому гальмування електродвигуна за визначеним законом до зупинки та накладання гальма. На фіг. 1 показано графік зміни кутової швидкості електродвигуна механізму підйому вантажу; графік побудований при умовах, що тривалість етапів складає: першого - 1 секунда, другого і четвертого - 2 секунди, третього - 3 секунди. Графік, який показано на фіг. 1 побудований за умови, що усталена швидкість руху уст електродвигуна механізму підйому вантажу рівна 1400 рад/с. На фіг. 2 зображено алгоритм реалізації способу керування електродвигуном механізму підйому вантажу мостового крана. Також поставлена задача вирішується тим, що процес підйому вантажу виконують у три етапи. До початку першого етапу оператор крана вводить команду на зміну довжини канату (підйом вантажу на певну висоту, яка відповідає довжині канату l зад ). Після цього починається перший етап підйому вантажу, при якому виконують розгін електродвигуна до посадочної швидкості пос пос 0,1 уст . При цьому слабина канату вибирається, вантаж починає підніматись, а у канаті виникають незначні динамічні навантаження, які пов'язані з невеликими затухаючими коливаннями вантажу, що виникли в момент його відриву від основи. Надалі вимірюють зусилля натягу канату для визначення зусилля, яке діє у ньому Fнат .кан. , і 40 перевіряють умову: Fнат .кан.i 0; , (1) Fнат .кан.i Fнат .кан.i1 де Fнат .кан.i та Fнат .кан.i1 - зусилля натягу канату, які відповідають поточному, і-тому, та попередньому, (і-1)-ому, вимірам. Виконання першої умови означає, що канат навантажений, а другої - що зусилля натягу канату Fнат .кан. не змінилося між вимірюваннями і що коливні процеси 45 руху вантажу затухли, а у канаті діє лише зусилля від ваги вантажу, яке визначається за виразом: Fваг .вант . mвант . g , (2) де m вант . - маса вантажу; g - прискорення вільного падіння. Використовуючи формулу (2), F знаходять масу вантажу m вант . ваг .вант . . Після цього визначають поточну довжину канату lпот g 50 та розраховують його приведену жорсткість: 1 UA 85763 U с кан. Esa , (3) lпот Е - модуль пружності канату; s - площа поперечного перерізу канату; a - кратність поліспаста; lпот - поточна довжина канату. де 5 Другий етап підйому вантажу починається з того, що виконують розгін електродвигуна до усталеної швидкості уст за законом: 10 t T ел.дв. ( 60m вант . t 2t 2 3tT T 2 пос уст с кан. (Т 5 пос 15 t 4 T пос уст 6t 5 уст пос де 3 2 уст 1 пос ))c кан. Т 5 , (4) Т - тривалість розгону електродвигуна до швидкості уст ; t - поточний час. Як тільки електродвигун набрав швидкість уст перевіряють умову: lпот . 10 Т г уст r 2ua l зад. , (5) де l зад. - довжина канату, яка задана оператором крана; Т г - тривалість гальмування електродвигуна до повної зупинки; r - радіус канатного барабана. Якщо умова (5) не виконується, то продовжить живити електродвигун у режимі, при якому його вал обертається з усталеною швидкістю уст . Виконання умови (5) означає, що необхідно загальмовувати електродвигун, оскільки для того, щоб досягти заданої оператором крана довжини підвісу l зад. 15 потрібно, щоб на канатний барабан набігла довжина канату, яка рівна Т г уст r . Як тільки умова 2ua (5) виконалась, починають третій етап руху електродвигуна. На третьому етапі руху електродвигуна його загальмовують, причому кутова швидкість вала змінюється за законом: 5 ел.дв. с кан. t Tг. 6t 2 3tTг. Т г2. mвант . 120t 3 180t 2 Tг. 60tТ г2. gТ г. 20 3 уст 5 с кан. Т г . (6) У момент зупинки електродвигуна на його вал накладають гальмо, яке унеможливлює опускання вантажу під дією його ваги. Пропонований спосіб керування електродвигуном механізму підйому вантажу мостового крана дозволяє унеможливити перевантаження електродвигуна механізму підйому вантажу мостового крана, зменшити шкідливі коливання вантажу у вертикальному напрямку, подовжити термін експлуатації канатів та підвищити їх надійність. 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 Спосіб керування електродвигуном механізму підйому вантажу мостового крана, при якому рух механізму підйому вантажу виконують за неперервною функцією від аргументу часу з усуненням коливань вантажу у кінці перехідного процесу, який відрізняється тим, що рух електродвигуна механізму підйому вантажу розділений на три етапи: на першому електродвигун розганяють і він певний час обертається на посадочній швидкості; на другому виконують розгін електродвигуна до усталеної швидкості та рух електродвигуна на усталеній швидкості, причому зміну кутової швидкості двигуна виконують за законом: 35 10 t T ел.дв. ( 60mвант .t 2t 2 3tT T 2 пос уст с кан. (Т 5пос 15 t 4T пос уст 6t 5 уст пос де m вант . - маса вантажу; 3 2 уст 1 пос ))c кан.Т 5 , T - тривалість розгону електродвигуна до усталеної швидкості; уст - усталена швидкість руху електродвигуна; пос - посадочна швидкість руху електродвигуна; t поточний час; с кан. - приведена жорсткість канату; на третьому етапі здійснюють гальмування 40 електродвигуна до зупинки та накладання гальма, причому зміну кутової швидкості двигуна виконують за законом: 2 UA 85763 U 2 2 5 ел.дв. скан. t Tг. 6t 2 3tTг. Тг. mвант . 120t3 180t 2Tг. 60tТг. gТг. 3 с Т уст кан. де Tг - тривалість гальмування електродвигуна до повної зупинки. 3 5 г , UA 85763 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюLoveikin Viacheslav Serhiiovych, Romasevych Yurii Oleksandrovych
Автори російськоюЛовейкин Вячеслав Сергеевич, Ромасевич Юрий Александрович
МПК / Мітки
МПК: B66C 13/22
Мітки: вантажу, мостового, електродвигуном, керування, спосіб, підйому, механізму, крана
Код посилання
<a href="https://ua.patents.su/6-85763-sposib-keruvannya-elektrodvigunom-mekhanizmu-pidjjomu-vantazhu-mostovogo-krana.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування електродвигуном механізму підйому вантажу мостового крана</a>
Пристрій для керування електроприводом механізму підйому прогінного крана
Номер патенту: 31547
Опубліковано: 10.04.2008
Автори: Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович, Ромасевич Юрій Олександрович
МПК: B66C 13/22
Мітки: крана, механізму, підйому, пристрій, прогінного, керування, електроприводом
Формула / Реферат:
Пристрій для керування електроприводом механізму підйому прогінного крана, що містить датчик стану каната, задатчик, блок керування електроприводом механізму підйому вантажу, який відрізняється тим, що обладнаний датчиком довжини каната, який змонтований на канатному барабані і підключений до мікроконтролера, на другий вхід якого підключений задатчик, а на третій - датчик стану каната, причому до інформаційного виходу мікроконтролера...
Механізм підйому мостового крана

Номер патенту: 62308
Опубліковано: 15.12.2003
Автори: Шебанова Тетяна Володимировна, Шебанов Ігор Володимирович
МПК: B66C 17/00
Мітки: підйому, механізм, мостового, крана
Формула / Реферат:
1. Механізм підйому мостового крана, який має вантажний барабан, крановий редуктор, електродвигуни основної та установочної швидкості підйому, вали, гальма, який відрізняється тим, що прохідний вал редуктора в середній частині обладнаний хрестовиною з цапфами, які сполучені з сателітами обертання.2. Механізм за п. 1, який відрізняється тим, що сателіти обертання кінематично зв'язані з двома зубчастими конічними колесами, при цьому...
Пристрій для керування приводом механізму переміщення візка крана
Номер патенту: 50540
Опубліковано: 10.06.2010
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/00
Мітки: візка, пристрій, приводом, крана, переміщення, механізму, керування
Формула / Реферат:
Пристрій для керування приводом механізму переміщення візка крана, що містить датчик довжини гнучкого підвісу, датчик швидкості руху візка і частотний перетворювач, який відрізняється тим, що додатково обладнаний пультом керування та бортовим комп'ютером, до якого підключені всі датчики.
Багатошвидкісний механізм піднімання крана мостового типу
Номер патенту: 41845
Опубліковано: 10.06.2009
Автори: Скворцов Максим Миколайович, Кияшко Володимир Тимофійович, Веремчук Інна Володимирівна
МПК: B66C 17/00
Мітки: типу, механізм, багатошвидкісний, мостового, крана, піднімання
Формула / Реферат:
Багатошвидкісний механізм підйому та опускання вантажу крана мостового типу, що містить привід, вантажний візок та канат, який відрізняється тим, що на кінцевих балках стаціонарно встановлені щонайменше два механізми піднімання та опускання вантажу, на барабанах яких закріплений канат, зв'язаний із вантажозахоплюючим пристроєм через напрямні ролики, встановлені на візках з індивідуальними механізмами пересування для зміни відстані між ними та...
Спосіб керування режимами пуску та гальмування крана з траверсною підвіскою вантажу
Номер патенту: 68241
Опубліковано: 26.03.2012
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B66C 13/06
Мітки: вантажу, гальмування, режимами, спосіб, керування, пуску, крана, підвіскою, траверсною
Формула / Реферат:
Спосіб керування режимами пуску та гальмування крана з траверсною підвіскою вантажу, який відрізняється тим, що протягом пуску та гальмування крана задається приводне (гальмівне) зусилля руху крана, яке змінюється за поліноміальною залежністю від аргументу часу, причому процес гальмування відрізняється від пуску тим, що динамічна складова зусилля входить у вказану поліноміальну залежність зі знаком "-": для пуску Fпуск = Fдин.+W,...
Попередній патент: Спосіб моделювання протекторної дії антибіотиків при гнійно-запальних процесах ротової порожнини експериментальних тварин на фоні впливу опіоїдного анальгетика
Наступний патент: Пристрій для керування механізмом підйому вантажу прольотного крана
Випадковий патент: Вогнегасник порошковий