Двогусеничний трактор (варіанти)
Формула / Реферат
1. Двогусеничний трактор, який включає:
- основну опорну структуру (23, 54, 86);
- контрольну станцію, що забезпечена засобами управління трактором;
- систему ходової частини, що має один лівосторонній гусеничний механізм (12, 22) і один правосторонній гусеничний механізм (12, 22), при цьому дані гусеничні механізми( 12, 22) приєднані до основної опорної структури(23, 54, 86);
- колісний вузол, що містить одне (42) або кілька коліс (42), розташованих перед гусеничними механізмами (12, 22);
- трансмісію для забезпечення руху обох гусеничних механізмів (12, 22) на одних і тих же або різних швидкостях,
який відрізняється тим, що містить:
- засіб прикладання сили для переміщення вертикального навантаження назад і вперед між передньою частиною гусеничних механізмів (12, 22) і колісним вузлом (26);
- засіб регулювання кількості навантаження на колісний вузол (26);
- засіб, що спричиняє або дозволяє рух колеса (42) або коліс (42) колісного вузла (26) по кривій траєкторії руху трактора, визначеній різницею у швидкостях гусениць між першим і другим гусеничними механізмами (12, 22).
2. Трактор за п. 1, в якому засіб прикладання сили містить механізм створення моменту противаги (84).
3. Трактор за п. 1, в якому засіб регулювання кількості навантаження на колісний вузол (26) включає контрольно-регулювальний засіб або систему контролю.
4. Трактор за п. 1, в якому засіб, що спричиняє або дозволяє колесу (42) або колесам (42) колісного вузла (26) рухатися по кривій траєкторії руху трактора, визначеній різницею у швидкостях гусениць, включає контрольно-регулювальний засіб або систему контролю.
5. Трактор за п. 1, в якому підвіска передньої осі включає систему активної підвіски.
6. Двогусеничний трактор, що містить
- пару гусеничних механізмів (12, 22), які оснащені гумовими гусеничними стрічками з ґрунтозачепами та з’єднані між собою за допомогою відповідних передніх і задніх осей, що проходять, по суті, перпендикулярно напрямку руху;
- передній колісний вузол (26), який відрізняється тим, що містить контрольно-регулювальний засіб, який автоматично керує навантаженням на передній колісний вузол (26), для регулювання навантаження на передню вісь гусеничних механізмів (12, 22) для мінімізації зносу гумового протектора.
7. Двогусеничний трактор за п. 6, у якому контрольно-регулювальний засіб призначений для регулювання величини кута повороту для підтримання правильного вирівнювання під час повороту навколо своєї осі.
8. Двогусеничний трактор за п. 6, у якому контрольно-регулювальний засіб призначений для регулювання навантаження при перенесенні переднього навісного знаряддя (8’).
9. Двогусеничний трактор за п. 6, у якому гусеничні механізм (12, 22) і передній колісний вузол (26) мають відповідні епюри навантаження, регульовані контрольно-регулювальним засобом.
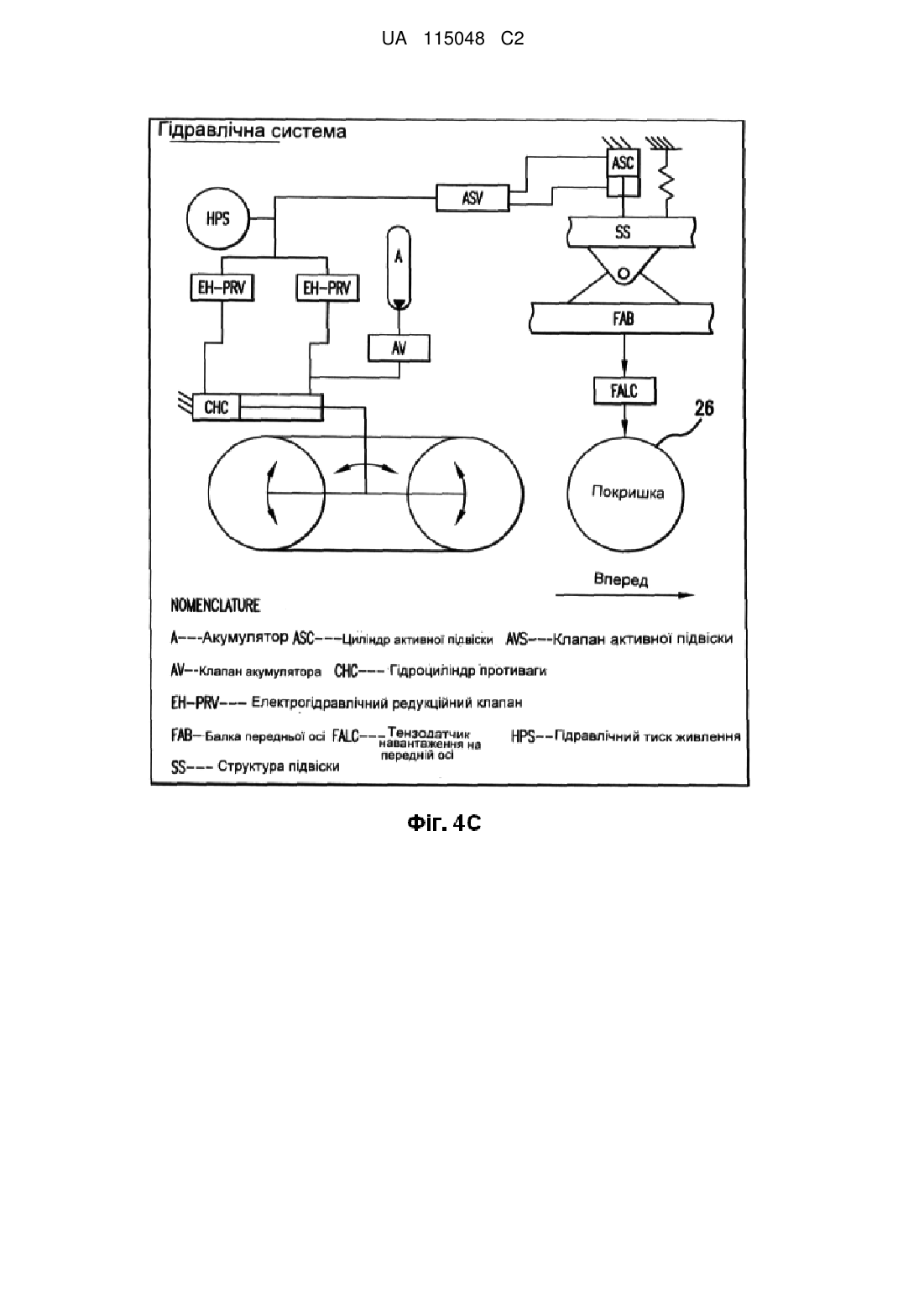
10. Двогусеничний трактор за п. 6, у якому гусеничні механізми (12 ,22) встановлені на осьових стрижнях (27, 60, 78) таким чином, щоб момент прикладався до гусеничних механізмів (12, 22) через гідравлічний циліндр (25, 82, 98) з плечем сили.
11. Двогусеничний трактор за п. 6, у якому передній колісний вузол (26) встановлений з можливістю взаємодії з моментами, генерованими навколо осьового стрижня гусеничного механізму (27, 60, 76).
12. Двогусеничний трактор за п. 6, який включає пружні елементи (56) для підвіски гусеничних механізмів (12, 22).
13. Двогусеничний трактор за п. 12, який містить акумулятор (А) для підвіски гусеничних механізмів (12, 22).
14. Двогусеничний трактор за п. 6, який додатково включає датчики (29, 48, 94), при цьому контрольно-регулювальний засіб призначений для отримання і опрацювання сигналів, що надходять від датчиків (29, 48, 94).
15. Двогусеничний трактор за п. 6, у якому кожний з двох гусеничних механізмів (12, 22) є приєднаним до гідравлічного циліндра (25, 82, 98), при цьому інший кінець гідравлічного циліндра (25, 82, 98) є приєднаним до основної опорної структури (23, 54, 86) трактора.
Текст
Реферат: Двогусеничний трактор включає основну опорну структуру, контрольну станцію, що забезпечена контрольними засобами управління трактором, систему ходової частини, що має один лівосторонній гусеничний механізм і один правосторонній гусеничний механізм, колісний вузол, що містить одне або кілька коліс, розташованих перед гусеничними механізмами, трансмісію для забезпечення руху обох гусеничних механізмів на одних і тих же або різних швидкостях, контрольно-регулювальний засіб прикладання сили для перенесення вертикального навантаження назад і вперед між передньою частиною гусеничних механізмів і колісним вузлом, контрольно-регулювальний засіб для регулювання кількості навантаження на колісний вузол, засіб, що спричиняє або дозволяє рух колеса або коліс колісного вузла рухатися по кривій траєкторії руху трактора, визначеній різницею у швидкостях гусениць між першим і другим гусеничними механізмами. UA 115048 C2 (12) UA 115048 C2 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 60 Перехресне посилання на споріднену заявку Дана заявка заявляє пріоритет тимчасової патентної заявки США 61/590990, поданої 26 січня 2012 року. Передумови до створення винаходу Даний винахід, в цілому, відноситься до пристрою для трактора, забезпеченого двома гусеницями. Більш конкретно, даний пристрій є засобом, що покращує конструкцію трактора, який має два гусеничні механізми і колісний вузол, розміщений перед гусеничними механізмами при цьому даний колісний вузол автоматично контролюється, з метою керування обсягу навантаження на колісному вузлі, наприклад, з метою обмеження або усунення пробуксовування, і тим самим, зменшення інтенсивності зносу ґрунтозачепів. При цьому, такий пристрій вирішує численні проблеми, з якими стикаються існуючі двогусеничні трактори, де застосовуються дві гумові гусениці типу "ремінь". З рівня техніки добре відомі трактори як двогусеничної, так і напівгусеничної конструкції. Найбільш ранні великі сільськогосподарські трактори часто виготовлялися напівгусеничної конструкції в якій було застосовано комбінацію сталевих гусениць з колесами. Що стосується тяги, були обрані гусениці, тому, що вони забезпечували кращі тягові характеристики, ніж колеса. Крім того, в умовах роботи на м'якому ґрунті гусениці забезпечували кращу мобільність, ніж колеса. З самого початку основним призначеннями переднього колісного механізму було забезпечення регулювання трактора. Гусениці мали хороші характеристики в умовах польових робіт. Однак, з метою забезпечення регулювання, значний відсоток від загального навантаження мав бути розподілений якраз на передній колісний вузол. Це спричинювало необхідність виготовлення трактора надто великої ваги. Часткове занурення переднього колісного вузла обумовлювало загрозу зниження мобільності трактора традиційної конструкції у м'якому ґрунту. Пізніше, була розроблена система рульового керування, яка була заснована на створенні різниці гусеничних швидкостей між двома гусеницями. Дана система різниці швидкостей добре спрацьовувала для забезпечення рульового керування і дозволяла видалити передній колісний механізм. Видалення переднього колісного механізму давало можливість всю вагу трактора використовувати для забезпечення відповідних тягових характеристик і для покращення мобільності у м'якому ґрунті. Сталеві гусениці з гострими наконечниками ґрунтозачепів мають недолік, який полягає в тому, що вони не здатні переміщатися по дорогах з твердим покриттям, тому що, зазвичай, мають тенденцію руйнувати поверхню дороги і рухаються надто повільно. Із появою асфальтованих доріг і віддалених одне від одного фермерських полів, застосування сталевих гусениць стало небажаним. Зручніше стало користуватися конструкцією колісного трактора в якій застосовуються тільки шини. Для тракторів, які призначені, в основному, для витягування великих вантажів, переважним є те, коли всі колеса привідні, аби вся вага могла сприяти дії тягових сил. Двома основними системами рульового керування, які наразі використовуються в конструкціях колісних тракторів є руль (штурвал) Акермана для малогабаритних тракторів і система зчленованого регулювання для великих тракторів. Приблизно в 1985 році, з'явився двогусеничний трактор, у якому, на відміну від сталевих гусениць використовували гумові гусениці типу "ремінь". Даний гусеничний трактор з гумовими гусеницями типу "ремінь" тепер може переміщатися по дорозі без шкоди для дорожнього покриття, а також з підвищеною швидкістю як на дорозі, так і в полі. Далі була розроблена і застосована у згаданому вище двогусеничному тракторі удосконалена система рульового керування, відома в даній області як механізм диференціального рульового керування. В даний час на ринку існують дві різні конструкції сільськогосподарських тракторів з гумовими гусеницями типу "ремінь". Одна конструкція має дві гусениці, а інша конструкція має чотири гусениці. Динамічні характеристики двогусеничної конструкції характеризуються наступним: стандартна двогусенична конструкція має стійкий стан жорсткої їзди під час руху по дорозі, бо кількість навантаження на передній шпиндель гусеничного складального вузла є надмірним при русі по дорозі, і тому в задній частині трактор не має підвіски. Така надмірна кількість переднього навантаження також спричинює швидкий знос гумових ременів. Процес, що призводить до швидкого зносу, включає рух частини гумового ременя, що обгорнута навколо колеса передньої осі (фіг. 1). Це колесо розташоване всередині ременя, в передній частині ременя, і називається переднім напрямним колесом Частина наконечників ґрунтозачепів переміщуючись тангенціально навколо переднього напрямного колеса, рухається швидше в порівнянні з базовою швидкістю, ніж коли така частина переміщується на прямих ділянках ременя. Базова швидкість у даному випадку визначається 1 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 60 швидкістю нерозтяжної армуючої структурної складової ременя. Дане більш швидке переміщення навколо напрямного колеса відбувається тому, що наконечники ґрунтозачепів при переміщенні по дузі навколо переднього напрямного колеса знаходяться на більшому радіусі, ніж радіус армуючої структурної складової ременя, якщо вимірювати від центру обертання переднього напрямного колеса. Дане відношення швидкості наконечників ґрунтозачепів до армуючої складової ременя являє собою пряму пропорційну залежність двох вказаних радіусів. Тобто, посилаючись на нерозтяжну армуючу структурну складову ременя як таку, що асоційована зі швидкістю транспортного засобу, частина наконечників ґрунтозачепів, переміщаючись тангенціально навколо переднього напрямного колеса, рухаються з більшою швидкістю, ніж швидкість транспортного засобу. В цьому відношенні, як правило, фахівцям в даній області відомо, що, коли ґрунтозачепи шини або ґрунтозачепи ременя переміщуються зі швидкістю, відмінною від швидкості транспортного засобу, відбувається явище, яке має назву "ковзання". Ковзання спричинює знос наконечників ґрунтозачепів, причому інтенсивність зносу пропорційна силі контакту між наконечником і поверхнею землі. Процес, що призводить до швидкого зносу ґрунтозачепів, спеціально відноситься до ситуацій, які відбуваються безпосередньо нижче і трохи попереду від центральної лінії переднього напрямного колеса в точці, де наконечники ґрунтозачепів починають контактувати з землею, тобто, здійснюють перехід від не навантаженого до навантаженого стану. Як показано на фіг. 1, коли трактор стандартної двогусеничної конструкції (на фіг. 1 показана тільки права гусениця 12) рухається по дорозі, навантаження на переднє напрямне колесо 14 є надмірним, як визначено навантаженням (L) як функцією позиціонування уздовж гусениць по відношенню до напрямку руху. Очевидно, що навантаження в положенні "I" гусениці, безпосередньо під центральною лінією 14А осі напрямного колеса (що співпадає з хитною опорою), є те навантаження, в якому реалізується максимальне навантаження або вага. Таке надмірне навантаження спричинює надмірне стиснення в ґрунтозачепах нижче центральної лінії 14А переднього напрямного колеса. Це стиснення, в свою чергу, призводить до того, що первинна точка контакту ґрунтозачепу з'явиться на декілька сантиметрів попереду центральної лінії напрямного колеса. Як описано вище, наконечники ґрунтозачепів контактують з землею з ковзанням. Ковзання продовжується до тих пір, поки ремінь буде знаходитися в тому стані, коли він обгортається навколо переднього напрямного колеса. Під час декількох сантиметрів ковзання, контактне зусилля між наконечником протекторного браслету і ґрунту збільшується від нуля до максимального значення (при "I", як показано на фіг. 1). Результатом є висока інтенсивність зносу наконечника ґрунтозачепів в даному місці (тобто, поблизу переднього напрямного колеса 14), коли наконечник ґрунтозачепів переходить від не навантаженого до навантаженого стану. Названий вище жорсткий рух являється результатом переходу наконечників ґрунтозачепів від не навантаженого режиму до режиму надмірного навантаження в поєднанні з великою відстанню між наконечниками ґрунтозачепів тобто близько 20 см. Це відстань у поздовжньому напрямку між ґрунтозачепами ременя. Таке конструктивне рішення створює ефект, подібний до гуркоту шумових смуг при переміщенні на трасі. Такий динамічний стан призводить до необхідності частої заміни витратних гумових гусеничних ременів. Також відомо, що трактори мають тенденцію передавати вертикальне навантаження від їх передніх опорних засобів і на їх задні опорні засоби, коли тягнуть навантаження на зчіпному пристрої. Тягове зусилля створює момент тангажа (кутового повороту), який приблизно дорівнює кількості тягового зусилля, помноженої на висоту зчіпного пристрою. Передача вертикального навантаження є реакція на даний момент тангажа. Для стандартної двогусеничної конструкції, тягове зусилля передає вертикальне навантаження з передньої частини гусеничних механізмів і на задні механізми. При застосуванні гумових гусениць типу "ремінь", для того, щоб досягти їх максимальної тягової ефективності і найкращих флотаційних характеристик, необхідно, щоб вага трактора була рівномірно розподілена під гусеничними механізмами спереду назад. У стандартній двогусеничній конструкції, зазвичай, застосовують противаги в передній частині центральної структури трактора, які призначені для одержання профілю з рівномірно розподіленим навантаженням під гусеничними механізмами спереду назад при польових роботах, які, зазвичай, потребують значних тягових зусиль. Така ситуація відноситься до таких зусиль, які мають бути належним чином збалансованими для польових робіт. У разі, коли баланс трактора зміщено, із-за великої кількості тягового зусилля за умов польових робіт, то такий стан трактора не є належним чином збалансованим при його переміщенні по дорозі, де невелика кількість тягового зусилля є нормою, як показано на фіг. 1. 2 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винятком з норми є буксирування важких транспортних засобів круто вгору. Нормальною ситуацією є, коли рухаючись по дорозі, переднє напрямне колесо кожного гусеничного механізму несе на собі великий відсоток ваги транспортного засобу. Під час деяких операцій при виконанні польових робіт кількість тягового зусилля має тенденцію змінюватися при проходженні трактора через поле. Це, в свою чергу, призводить до того, що розподіл навантаження під гусеницями змінюється пропорційно перемінному тяговому зусиллю, коли трактор двогусеничної конструкції перетинає поле. Нерівномірний розподіл навантаження під гусеницями збільшує витрату палива, збільшує інтенсивність прослизання гусениці, збільшує знос гусениці і збільшує ущільнення ґрунту. Для забезпечення відповідних тягових характеристик при польових роботах бажано застосовувати агресивний малюнок ґрунтозачепів, наприклад, шевронного типу, на ремені і розташовувати ґрунтозачепи на відстані близько 20 см один від одного. При переміщенні по дорозі дана велика відстань між ґрунтозачепами в комбінації з великим навантаженням на переднє напрямне колесо кожного гусеничного механізму є джерелом подразнювальної та безперервної вібрації, від якої має потерпати водій трактора і яка нагадує безперервний гул шумових смуг на трасі. Інша ситуація, що відбувається при здійсненні операцій під час польових робіт, полягає в тому, що трактор стандартної двогусеничної конструкції різко заривається за певних умов, наприклад, рухаючись під прямим кутом по краю. Такий різкий кроковий рух може призвести до того, що водій буде відчувати дискомфорт, травмуватися або навіть втратить управління трактором. Трактор стандартної двогусеничної конструкції не має підвіски на задній осі. Це привносить додаткові ризики дискомфорту для водія і утворення високих напружень в конструкції трактора. Під час здійснення рульового маневру трактор стандартної двогусеничної конструкції часто стикається з гальмівною дією на гусеничному механізмі, що відбувається на внутрішній стороні радіусу повороту. Це відбувається тому, що внутрішнє гальмівне зусилля гусениці часто потрібне, щоб подолати латеральні тягові зусилля. Існують і інші ситуації, коли обидва гусеничні механізми відчувають на собі гальмівної дії і тоді, коли гальмівні сили мають бути нерівномірним з боку в бік для забезпечення рулювання, наприклад, коли трактор штовхається важким транспортним засобом, рухаючись вниз по крутому схилу, і потрібна наявність максимальної гальмівної потужності для утримання водієм максимально допустимої швидкості. За умови необхідності рульового керування, тому що внутрішня гусениця радіуса повороту рульового керування знаходиться в граничній точці гальмування, гусениця з зовнішньої сторони радіусу повороту повинна позбавитися деякої кількості своєї гальмівної сили для того, щоб виконати рульове керування. Кінцевим результатом є зростання швидкості центральної лінії трактора і транспортного засобу, наприклад, причепа. Після цього гальма не в змозі уповільнити рух трактора і причепа до максимально допустимої швидкості для оператора. Інший можливий результат викликаний штовханням трактора, наприклад, причепом є результуючий передній момент тангажа (крутого повороту), який ще більше посилює вертикальне навантаження на передню частину гусеничних механізмів і зменшує навантаження на задню частину. Амплітуда результуючого переднього крутого повороту збільшує висоту зчіпного пристрою і в свою чергу відхиляє дишло причепа у зворотному напрямку, забезпечуючи більш ймовірне складання між зчіпним пристроєм трактора та дишлом причепа. Суть винаходу Даний винахід забезпечує двогусеничний тракторний вузол і трактор, що включає останній, у яких подолано недоліки технічних рішень, відомих з рівня техніки. В одному з прикладів здійснення винахід забезпечує пристрій для трактора з двома гумовими гусеничними механізмами і колісним вузлом, розміщеним перед гусеничними механізмами, який автоматично контролює обсяг навантаження на колісному вузлі, наприклад, з метою обмеження або усунення пробуксовування, і тим самим, зниження інтенсивності зносу ґрунтозачепів гусеничних механізмів. При цьому, такий пристрій вирішує численні проблеми, з якими стикаються існуючі двогусеничні трактори, де застосовуються дві гумові гусениці типу "ремінь". Так, винахід покращує жорстку їзду, з якою стикається водій, рухаючись по дорозі в двогусеничному тракторі звичайної конструкції, уповільнює швидкий знос ґрунтозачепів ременя, який, зазвичай, виникає під час руху по дорозі в двогусеничному тракторі звичайної конструкції, забезпечує покращення розподілу нерівномірного навантаження під гусеничними механізмами, яке, зазвичай, виникає в двогусеничному тракторі звичайної конструкції, знижує вірогідність непередбачуваних різких занурень і крутих поворотів, що, зазвичай, спричинюють дискомфорт і заважають роботі оператора, коли він веде по дорозі тракторі звичайної двогусеничної 3 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 60 конструкції, на його частину припадає вирішення проблеми несприятливого розташування центру тяжіння без противаг у двогусеничному тракторі звичайної конструкції, полегшує певні несприятливі ситуації щодо керування транспортним засобом, які можуть виникнути у двогусеничному тракторі звичайної конструкції, долає проблеми, пов'язані з додатковим рульовим керуванням у двогусеничних тракторах звичайної конструкції, усуває необхідність в наявності підвіски в задній частині трактора, коли необхідність в останній виникає у двогусеничних тракторах звичайної конструкції, долає проблему надміру консольного приладдя, змонтованого в передній частині, що, як правило, характерно для відомих з рівня техніки двогусеничних тракторах звичайної конструкції, і мінімізує занурення в ґрунт при поворотах, в порівнянні з відомими двогусеничними тракторами. Конструкція трактора включає основну опорну структуру, контрольну станцію, що забезпечена контрольними засобами управління трактором, систему ходової частини, що має один лівосторонній гусеничний механізм і один правосторонній гусеничний механізм, колісний вузол, що містить одне або кілька коліс, розташованих перед гусеничними механізмами, трансмісію для забезпечення руху обох гусеничних механізмів на одних і тих же або різних швидкостях, контрольно-регулювальний засіб прикладання сили для перенесення вертикального навантаження назад і вперед між передньою частиною гусеничних механізмів і колісним вузлом, контрольно-регулювальний засіб регулювання навантаження на колісний вузол, засіб, що спричиняє або дозволяє рух колеса або коліс колісного вузла слідувати по кривій траєкторії руху трактора, визначеній різницею у швидкостях гусениць між першим і другим гусеничними механізмами. Переважно, підвіска передньої осі включає в себе активну підвіску. В іншому прикладі здійснення даний винахід забезпечує сільськогосподарський трактор з парою гусеничних механізмів, які включають гумові стрічки з ґрунтозачепами, гусеничні механізми з'єднані між собою за допомогою відповідних передніх і задніх осей, що проходять, по суті, перпендикулярно напрямку руху, передній колісний вузол і контрольно-регулювальний засіб або систему контролю, яка автоматично регулює навантаження, на передньому колісному вузлі, з метою регулювання навантаження на передній осі гусеничних механізмів, щоб звести до мінімуму знос гумового протектора. Переважно, контрольно-регулювальний засіб призначений для регулювання величини кута повороту та забезпечення коректних кутів повороту осьових стрижнів, призначений для контролю навантаження при перенесенні переднього навісного знаряддя і включає в себе мікропроцесор, виконуючий набір комп'ютерних команд, що зберігаються в пам'яті комп'ютера або іншого пристрою або структури для зберігання пам'яті, які при виконанні забезпечують баланс для зменшення зносу протектора. Короткий опис креслень Аспекти, розкритого технічного рішення стануть очевидними при знайомстві з наступним докладним описом винаходу, в якому присутні посилання на додані креслення, на яких, подібні посилальні позиції можуть вказувати на подібні елементи конструкції: фіг. 1 є правостороннім зображенням трактора двогусеничної конструкції, включаючи епюр навантаження під час руху по дорозі (рівень техніки); фіг. 2 є правостороннім зображенням трактора двогусеничної конструкції, включаючи епюр навантаження під час руху по дорозі, відповідно до одного з прикладів здійснення даного винаходу; фіг. 3 є правостороннім зображенням трактора двогусеничної конструкції, включаючи епюри навантаження під час проведення польових робіт, відповідно до прикладу здійснення двогусеничного трактора, представленого на фіг. 2; фіг. 4A представляє лівий фотографічний вид спереду експериментального трактора, який ілюструє ознаки двогусеничного трактора, представленого на фіг. 2, 3; фіг. 4В представляє систему управління, відповідну винаходу; фіг. 4C представляє принципіальну схему гідравлічної системи, відповідної винаходу; фіг. 4D зображує мікропроцесор (комп'ютер), який включено в конструкцію як частину системи управління; фіг. 5 представляє правий перспективний вид ззаду двогусеничного трактора, представленого на фіг. 2, 3; фіг. 6 зображує основну систему рульового керування для застосування з двогусеничним трактором, відповідно до винаходу; фіг. 7 зображує колісний вузол двогусеничного трактора для акцентування уваги на величині кута повороту, за умови забезпечення коректного вирівнювання, у відповідності з прикладами застосування винаходу, представленими на фіг. 2 і 3; 4 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 фіг. 8 зображує колісний вузол двогусеничного трактора для акцентування уваги на величині кута повороту, за умови забезпечення коректного вирівнювання, при повороті осьового стрижня; фіг. 9 акцентує увагу на видові від центру, якщо дивитися вперед і праворуч від частини колісного о вузла двогусеничного трактора за прикладом здійснення винаходу, представленим на фіг. 2 і 3; фіг. 10 зображує передній лівосторонній вид знизу прикладу здійснення винаходу, представленого на фіг. 2 і 3; фіг. 11 зображує вид зверху задньої сторони, якщо дивитися від центру назовні, відповідно до прикладу здійснення, представленого на фіг. 2 і 3; фіг. 12 являє собою вид зверху лівої задньої сторони, відповідно до прикладу здійснення винаходу, представленого на фіг. 2 і 3; фіг. 13 являє собою правосторонній вид звичайного двогусеничного трактора при перенесенні знаряддя, змонтованого в його задній частині (відомий рівень техніки); фіг. 14 являє собою правосторонній вид двогусеничного трактора, відповідно до прикладу здійснення винаходу, представленого на фіг. 2 і 3; і епюр навантаження при перенесенні знаряддя, змонтованого в його задній частині; фіг. 15 являє собою правосторонній вид звичайного двогусеничного трактора при перенесенні знаряддя, змонтованого в його передній частині (відомий рівень техніки); і фіг. 16 являє собою правосторонній вид двогусеничного трактора, відповідно до прикладу здійснення винаходу, представленого на фіг. 2 і 3; і епюр навантаження при перенесенні знаряддя, змонтованого в його передній частині. Докладний опис винаходу Нижче наводиться докладний опис прикладів здійснення винаходу, зображених на доданих кресленнях. Приклади здійснення представлені з таким ступенем деталізації, щоб достатньо ясно викласти інформацію про винахід, і призначені для того, щоб зробити такі приклади здійснення очевидними для фахівців середньої кваліфікації в даній галузі техніки. Тим не менше, кількість представленої детальної інформації не призначена для обмеження очікуваних варіантів прикладів здійснення винаходу; навпаки, є намір охопити всі модифікації, еквіваленти і альтернативи, що підпадають під обсяг технічного та юридичного захисту даного винаходу, межі якого визначено доданою формулою винаходу. В одному з прикладів здійснення даний винахід забезпечує пристрій для трактора з двома гумовими гусеничними механізмами і колісним вузлом, розміщеним перед гусеничними механізмами, який автоматично контролює обсяг навантаження на колісному вузлі, наприклад, з метою обмеження або усунення пробуксовування, і тим самим, зниження інтенсивності зносу ґрунтозачепів гусеничних механізмів. Як було зазначено вище, виключно такий пристрій за винаходом вирішує ряд технічних проблем, а саме: усуває або значно зменшує жорсткість руху і вібрації; забезпечує підвіску для заднього приводу; ліквідує надзвичайну чутливість до виникнення тангажа (крутого повороту), включаючи максимум чутливості; істотно знижує знос ґрунтозачепів. забезпечує рівномірне навантаження під середніми колесами, напрямним і приводними колесами; знижує концентрацію компонентів і їх вагу в задній частині трактора, що призводило до надмірної довжини передньої частини і надмірної передньої противаги на двогусеничних тракторах; зменшує занурення в ґрунт при поворотах; забезпечує відповідний баланс при наявності знаряддя, встановленого в передній частині трактора; виключає необхідність наявності додаткової системи рульового керування; і покращує характеристики керованості для забезпечення комфортного руху по шляху загального користування. На Фіг. 1 представлено праву частину звичайного двогусеничного трактора з двома гумовими гусеничними механізмами типу "ремінь" 12. Епюр навантаження під гусеницями, як показано, є характеристичною ознакою руху трактора на дорозі. Велике навантаження в передній частині гусеничних механізмів, позначене як I, і більш легке навантаження в задній частині гусеничних механізмів позначене як LT), в комбінації з типовими ґрунтозачепами, встановленими з інтервалами, спричинює вібрацію всього трактора, що призводить до 5 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 ушкодження трактора і утворює дискомфорт для оператора, а також призводить до швидкого зносу ґрунтозачепів при переміщенні по шляхах. На Фіг. 2 зображено двогусеничний трактор за винаходом 20, що має пару гусеничних механізмів 22 і передній колісний вузол 26. Гусеничні механізми 22 і передній колісний вузол 26 мають відповідні епюри навантаження (тобто, навантаження (L)), під гусеницями по їх протяжності (LT; в напрямку руху) і під колесами (LW ; як показано), при русі по дорогах. Включення в конструкцію колісного вузла, контрольованого з метою утримування максимального навантаження, як показано на фіг. 2, значно знижує вібрації і знос ґрунтозачепів при русі по дорогах, у порівнянні зі звичайними двогусеничними тракторами, що не включають в себе переднього колісного вузла, також контрольованого. При застосуванні конструкції за винаходом водій почувається більш комфортно, а трактор не схильний до пошкодження від вібрацій. Винахід включає механізми і систему контролю, який цілеспрямовано забезпечує такі епюри ваги або навантаження. На Фіг. 3 зображено приклад здійснення винаходу (на фіг. 2) в ході польових робіт. У цьому випадку проілюстровано задані епюри навантаження під гусеничними механізмами (LT, як показано на фіг. 3) і переднім колісним вузлом (LW , як показано на фіг. 3). На Фіг. 4A зображено двогусеничний трактор за винаходом, що включає в себе колісний вузол 26, розташований в передній частині пари гусеничних механізмів 22. Кожен гусеничний механізм 22 встановлено на осьовому стрижені (чітко не видно на фіг. 4) в точці, що знаходиться посередині між його передньою і задньою осями. Момент може бути прикладений до гусеничних механізмів навколо осьового стриженя за допомогою гідравлічного циліндра, що має плече сили, а саме - перпендикуляр, яким вимірюється відстань від напрямку сили до осі повороту. В цьому випадку напрямком сили, є центральна лінія гідравлічного циліндра. На відміну від типового напівгусеничного транспортного засобу, кермові маневри генеруються через змушування двох гусеничних механізмів 22 рухатися на різних швидкостях. Дві позбавлені енергетичного живлення шини колісних вузлів 26, у відповідності з винаходом, синхронізовані відносно кута повороту під час рульових маневрів таким чином, що забезпечуються такі кути повороту, які запобігають занесенню (ковзанню) шин у поперечному напрямку. На Фіг. 4В зображено систему контролю, за винаходом. Однак, маємо звернути увагу на те, що елементи, які є складовими системи контролю можуть бути змінені. Наприклад, акселерометр в контурі зворотного зв'язку може бути замінений застосуванням сигналу від тензодатчика навантаження на передню вісь: в результаті чого спостерігається деяке зниження точності. Ще один приклад, існує кілька способів визначення вихідної швидкості трансмісії (валу коробки передач). Наприклад, співвідношення: швидкість двигуна Х діапазон трансмісії. Мікропроцесор, переважно, має бути розташований в кабіні трактора і забезпечений джгутами проводів, що передають вхідні і вихідні сигнали. На Фіг. 4C представлено принципіальну схему гідравлічної системи. Однак, маємо звернути увагу на те, що елементи, які є складовими системи контролю, можуть бути змінені. Наприклад, EH-PRV (електрогідравлічний редукційний клапан) може бути замінений іншим типом клапану, наприклад, електрогідравлічним клапаном скидання тиску (запобіжним клапаном тиску). Переважно, CHC (гідроциліндр противаги), обидва типи EH-PRV, AV (клапан акумулятора) і А (акумулятор), дублюються для кожної гусениці механізму. Кожна сторона отримує окремі, але ідентичні вихідні напруги від мікропроцесора з одним винятком. Під час повороту осьового стрижня або малого радіусу повороту в режимі польових робіт внутрішня гусениця переходить на режим дорожнього руху: зниження навантаження на передній частині внутрішньої гусениці. Сигнал на входження у цей режим поступає від рульового колеса, яке повертають за межі заданого кута. Лівий або правий поворот сигналізує про входження коректного гусеничного механізму в дорожній режим. Результатом цього є зниження руйнування ґрунту та зменшення бокового опору гусениці при повороті. Фіг. 4D зображує комп'ютер або мікропроцесор 13, який включений в якості частини системи контролю у відповідності з винаходом. До складу мікропроцесора входить, щонайменше, пам'ять 15 для збереження комп'ютерних команд і елементів / функції вводу / виводу 17. Комп'ютер або мікропроцесор може бути встановлений у тракторі в будь-якому місці, наприклад, комп'ютер може бути під капотом у відсіку двигуна, під панеллю приладів у відсіку водія, у двері, і т.п. Комп'ютер приймає і обробляє сигнали від датчиків з двигуна, від перемикачів, наприклад, віконних перемикачів, селекторів коробки передач, навіть для виявлення руху на педалі акселератора. Виходи датчиків застосовуються для багатьох цілей, включаючи управління різними електричними клапанами, сервоприводами і т.п., базуючись на 6 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 60 розрахунках, виконаних на основі вхідних сигналів від датчиків, у відповідності з встановленим програмним забезпеченням (збереженим у пам'яті). На Фіг. 5 представлено вид двогусеничного трактора за винаходом, концентруючи увагу на тому, що гусеничні механізми 22 з можливістю повороту встановлені на основній опорній структурі 23 трактора. Гідравлічний циліндр 25 кожного гусеничного механізму 22 кріпиться до основної опорної структури 23 трактора, при цьому інший кінець циліндра кріпиться до гусеничного механізму 22. Таке взаємне розташування конструктивних елементів формує механізм створення моменту противаги. Гідравлічним циліндром 25 виробляється момент повороту або по годинниковій стрілці (CW), або проти годинникової стрілки (CCW) навколо осьового стрижня 27 установки гусеничного механізму 22. Колісний вузол 26 монтується до основної опорної структури 23 перед гусеничними механізмами Задній зчіпний пристрій 21А і 3-позиційний зчіпний вузол 21B з'єднані з основною опорною структурою 23 через тензодатчики навантаження 29, які здатні вимірювати всі задні реалізовані навантаження, прикладені до основної опорної структури, в тому числі горизонтальні навантаження, вертикальні навантаження і моменти. Тензодатчики навантаження і гідравлічні циліндри є частиною системи з комп'ютерним управлінням замкнутого контуру (наприклад, системи управління, що контролює розподіл тиску на ґрунт під гусеничними механізмами). Передній колісний вузол 26 реагує на моменти, генеровані навколо осьового стрижня гусеничного механізму. Передній колісний вузол 26 змушений через дію системи управління нести на собі велике навантаження, рухаючись по шляху. На Фіг. 6 зображено основну систему 30 рульового керування для двогусеничного трактора за даним винаходом. Основну систему 30 рульового керування, зазвичай, називають пристроєм диференціального управління і через його дію змушують двогусеничні механізми рухатися з різними швидкостями, в результаті чого трактор змінює напрямки руху. Звичайним диференціалом 31 сателітної шестерні приводять у дію обидва вихідні вали 33, кожен з яких приводить у дію один гусеничний механізм на фіг. 6 не показаний). Планетарна система передач 36 з'єднана з двома осьовим стрижнями, як показано. Двигун 38 механізму рульового керування 38 при обертанні сприяє виникненню іншої швидкості на кожному з двох гусеничних механізмів. Відмінна гусенична швидкість пропорційна швидкості і напрямку обертання двигуна. На Фіг. 7 зображено передній колісний вузол у якості системи рульового керування типу Акерман, яка не передбачає зусилля при рульовому керуванні в ході польових робіт. Геометрія з'єднання 40 виконана таким чином, що вона забезпечує належне відстеження двох коліс 42. Датчик кута повороту (не показаний) застосовується, щоб забезпечити визначення радіусу повороту. Кут коліс синхронізується з різницею швидкостей гусениці таким чином, що попереджує латеральний занос (ковзання) передніх коліс. (Швидкість двигуна механізму диференційного рульового керування = (константа А) X [тангенціальна функція (кут нахилу (повороту) при рульовому керуванні)] X (швидкість трактора)). Звертаємо увагу на те, що існує багато різних типів доступних кутових датчиків. Відповідно до даного винаходу, переважно, застосовується кутовий датчик, встановлений всередині гідравлічного циліндра 46 (фіг. 8) механізму рульового керування для вимірювання ходу циліндра, з якого може бути розрахований кут повороту (нахилу) рульового колеса. Перелік інших ознак винаходу чи методів включає, не обмежуючись названими, датчики, встановлені на осьовому стрижені кожного колеса або рульової сошки. Функція колісного вузла 26 полягає в переносі навантаження (ваги) під час переміщення по шляхах, тобто, у значному розвантаженні передньої частини кожного гусеничного механізму. Ще одна функція колісного вузла полягає в стабілізації переднього кутового повороту трактора. Передній колісний вузол завжди перебуває в контакті з ґрунтом. Це попереджує раптове опускання вниз передньої частини трактора. Існуючий двогусеничний трактор може здійснювати "носове занурення" при перетинанні хребтів, подібних терасі. Фіг. 8 акцентує увагу на геометрії зв'язування (показано частково), яка попереджує боковий занос (пробуксовування) переднього колеса, коли диференціальне рульове керування спричинює явище, яке відоме в даній галузі техніки як поворот осьового стрижня. Здатність до повороту осьового стрижня забезпечує перевагу відносно технічних характеристик, в порівнянні зі звичайними тракторами із застосуванням шин. Правий поворот осьового стрижня ілюструється за умов, коли правосторонній гусеничний механізм має нульову швидкість, а лівий гусеничний механізм у цей час рухається вперед або назад. Осьова лінія кочення кожного колеса 42 перетинається в центрі зупиненого гусеничного механізму 26 (дивись центральний стрижень 44 і кутового датчика рульового керування 7 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 всередині циліндра 46 механізму рульового керування). Колісний вузол 26 прикріплено до системи підвіски (не показано), яка є або пасивною або активною або знаходиться у комбінованій позиції, що поєднує пасивний і активний стани. Слід звернути увагу на те, що колесо з внутрішньої сторони повороту осьового стрижня, повертається під більшим кутом, ніж колесо із зовнішньої сторони. Якщо уявити лінії візування від центру кожного колеса, то та точка, де вони перетинаються в вершині трикутника, є центром зупиненої внутрішньої гусениці, що сприяє уникненню заносу шини (покришки). Осьовою лінією кочення колеса є вісь шпинделя, якою є уявна лінія, що йде у нескінченність в обох напрямках. Та точка, де дві осі перетинаються є центром радіусу повороту Акермана. Осьовою лінією кочення двох гусеничних механізмів є вісь поворотного стрижня. Різниця у швидкостях гусениць визначає місце розташування радіусу повороту; точку, яка лежить на осі осьового стрижня. Синхронізація відбувається, коли дві осі коліс Акермана перетинаються у зазначеній точці (дивись формулу 1). На Фіг. 9 зображено, як генерується ввід у систему контролю, у зв'язку з кількістю 01 ваги на колісному вузлі. Шпинделі тензодатчиків навантаження, наприклад, датчик 48 навантаження на передню вісь (див. пневматичну підвіску 50 шини), є переважним способом моніторингу навантаження на колісному вузлі 26. Переважно, колісний вузол 26 містить гальмівну систему, узгоджену з вагою, що він несе. Фіг. 10 розкриває, що засоби підвіски 52 між основною опорною структурою 54 і гусеничними механізмами 26, включені в основну опорну структуру. Зображені пружні елементи містять гумові прокладки 56, але пружні елементи не обмежуються названим. Пружинними елементами можуть бути будь-які пружні елементи, відомі фахівцеві в даній області техніки. Представленою підвіскою є підвіска типу штовхаючої штанги (провідного важеля), що має шарнірні сполучення 58, які з'єднують пристрої підвіски 52 з центральною рамою. Другим джерелом приведення підвіски в дію є селективно використовуваний в гідравлічному контурі акумулятор (фіг. 4C), який забезпечує момент противаги на осьовому стрижені 60 гусеничного механізму. Існує багато видів акумуляторів, але, по суті, це просто камера, частково заповнена газом, що може стискатися, зазвичай, азотом. Коли масло тече в акумулятор або з акумулятора, воно стискає азот або відбирає тиск від азоту, діючи як компактна пружина. Акумулятор може бути встановлений, практично, в будь-якому місці і з'єднаний з гідравлічною системою, як показано на фіг. 4C (позиція А). За необхідності, простий клапан (AV) може заблокувати його всередині або назовні гідравлічної системи. Акумулятор може бути розташований всередині циліндра 82 осьового стрижня (фіг. 11). Третім джерелом приведення підвіски в дію є застосування покришок у колісному вузлі. Четвертим джерелом приведення підвіски в дію може бути забезпечення внутрішньої підвіски всередині кожного гусеничного механізму. П'ятим джерелом може бути забезпечення підвіски між колісним вузлом і основною опорною структурою 54. Причому, по центру, перед осьовими стрижнями гусеничного механізму, розміщено з'єднувальний вузол (74, 84; фіг. 11), призначений для відведення поперечних сил без пригнічення вертикальних рухів. Приводні вали 62, що виходять аж до гусеничних механізмів, показані як такі, що мають пару U-подібних сполучень 64, які можуть зупинити коливання гусеничного механізму і рухів підвіски. Корпус 68 механізму диференціального рульового управління представлено в центральній частині трактора і відразу за шарнірними з'єднаннями 58 гусеничного механізму. Вузол диференціального рульового управління приводиться в рух, як це показано з задньої точки спостереження, відкритим привідним валом, який частково представлено на ілюстрації, однак, слід визнати, що корпус передачі трансмісії і корпус 68 механізму диференціального рульового управління не обов'язково повинні бути окремими компонентами. Фіг. 11 показує кінцевий привід 70, розташований в центрі заднього шпинделя 74 гусеничного механізму. Переважно, кінцевий привід 70 має високу ступінь пониження, щоб зберегти малий розмір і легку вагу більш віддалених компонентів приводу. На зображенні представлено подвійне пониження з проміжною шестернею 76; гальмо 72; основний стрижень 78; перший ввід пониження 80; циліндр 82 ; механізм створення моменту 84 противаги; основна опорна структура 86. На зображенні першого редуктора не показано. Перший редуктор пониження із застосуванням проміжної шестерні використовується як звичайно. Переважно, гальмо 72 гусеничного механізму підключається безпосередньо до заднього шпинделя 74 гусеничного механізму. Щодо цього, переважним є, щоби вхідний привідний вал знаходився біля основного стрижня 78 гусеничного механізму для того, щоб утримати мінімальний вигин вхідного привідного валу 96. 8 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 60 Показано механізм створення 84 моменту противаги. Гідравлічний циліндр 82 кріпиться до рами 84 гусеничного механізму і до основної опорної структури 86 таким чином, щоб утворити плече важеля. На фіг. 12 представлена опорна структура для зчіпного пристрою 90, при цьому 3-позиційна навіска 92 встановлена на електронних ваговимірювальних тензодатчиках 94, здатних вводити інформацію про визначення горизонтальних навантажень, вертикальних навантажень і моментів від знаряддя, привідний вал 96 і циліндр 98. Базові формули 1. Швидкість двигуна механізму диференціального рульового керування = (константа A) X [тангенціальна функція (кут повороту при рульовому керуванні)] X (швидкість трактора) 2. Підсумовування моментів навколо середньої лінії осьового стрижня гусениці = нуль 3. Підсумовування сил у горизонтальному напрямку = нуль 4. Підсумовування сил у вертикальному напрямку = нуль 5. Сила циліндра = тиск x (площа циліндра) 6. Тиск = (прикладена напруга) x (поправочний коефіцієнт EH PRV) 7. Момент = сила x (довжина плеча сили) 8. Вага палива = рівняння конверсії x вихідна напруга паливного датчика 9. (Довжина плеча моменту для тягових зусиль) = (висота осі (валу) повороту (качання) над ґрунтом + 3 см допуску для проникнення ґрунтозачепів в ґрунт) 10. (Генерований момент противаги) = (гідравлічний тиск) X (площа циліндра) X (довжина плеча моменту противаги) 2 11. Рівняння профілю навантаження на гусеницю P = (aL +bL+c) (Число змінної величини розраховується підсумовуванням рівняння моментів і підсумовуванням рівняння вертикальних сил) 12. Формула поправки, що конвертує положення циліндра механізму рульового керування для здійснення певного кута повороту Формула є основою для синхронізації механізму диференціального рульового керування і рульового керування переднього колеса. Константа А заснована на фіксованих передавальних числах (відношеннях) всередині механізму диференціального рульового керування і кінцевого привода, на фіксованому діаметрі привода гусениці, на фіксованій колісній базі трактора та фіксованому датчику трактора. Водій вибирає швидкість транспортного засобу і повертає колесо, рульового керування, щоб слідувати по шляху. Колесо рульового керування у звичайний спосіб направляє передній колісний вузол. Виходячи з цього, система контролю отримує вхідні дані про кут повороту при рульовому керуванні і вхідні дані про швидкість транспортного засобу і обчислює необхідну швидкість двигуна механізму диференціального рульового керування. Цей маневр рульового керування направляє інформацію мікропроцесору системи контролю для обчислення швидкості двигуна механізму диференціального рульового керування. Мікропроцесор запрограмований на досягнення цієї мети шляхом прикладання збільшеної напруги до насосу механізму диференціального рульового керування. Швидкість двигуна механізму диференціального рульового керування знаходиться у ланцюзі замкнутого контуру, що забезпечує мікропроцесору ітерацію. Напруга зростає до тих пір, поки не буде досягнута відповідна швидкість двигуна механізму диференціального рульового керування. Слід звернути увагу на те, що для рульового керування передніх коліс при нульовій швидкості трактора розрахована швидкість двигуна механізму диференціального рульового керування дорівнює нулю. Це бажано з міркувань безпеки і тому, що водії звикли до повороту переднього колеса транспортних засобів ще при установці і не відчувають ніякого руху транспортного засобу. Формула 2 задовольняється тензодатчиками навантаження при вимірюванні зусиль як у горизонтальному, так і у вертикальному напрямках. Плечі сил як для горизонтальних сил, так і для вертикальних сил всіх позицій тензодатчиків навантаження є відомими і фіксованими значеннями. Базова вага конструкції трактора має відомі фіксовані плечі сил. Якщо плече сили для ваги палива не є константою, то формула для цього плеча сили може бути розробленою і введеною в програму контрольно-регулювального засобу. Формула 3 задовольняється всіма зовнішніми горизонтальними навантаженнями, прикладеними до трактора, що передаються через тензодатчики навантаження. Формула 4 задовольняється всіма змінними вертикальними навантаженнями, що вимірюються тензодатчиками навантаження та паливним датчиком. Формула 6 задовольняється наявністю даних про залежність напруги від тиску для редукційного клапану тиску: EH-PRV. 9 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 Формула 8 задовольняється з використанням паливного датчика, відкаліброваного у відповідності з формою паливного бака. Підтримання рівномірного тиску на ґрунт під гусеницями є складним завданням. Якщо осьовий стрижень гусениці зосереджений горизонтально між напрямним колесом і приводом, вертикальні навантаження на осі будуть рівномірно розподілені під гусеницями. Тягові зусилля, генеровані на ґрунті, будуть створювати момент на осьовому стрижні гусениці. Треба звернути увагу на те, що в даному описі довжина плеча сили для тягових зусиль = (дорівнює) висоті осі повороту (качання) над землею + 3 см допуску на проникнення ґрунтозачепу в ґрунт; необхідне тягове зусилля = (дорівнює) (сумі горизонтальних навантажень, виявлених передніми і задніми датчиками навантаження при пробуксовуванні) + (вага трактора + вага палива + водій); момент гусениці = (дорівнює) {(висоті осьового стриження над землею + 3 см допуску на проникнення ґрунтозачепу в ґрунт)} X {(суму горизонтальних навантажень, виявлених передніми і задніми датчиками навантаження при пробуксовуванні) + (вага трактора + вага палива + водій) X тангенціальну функцію (кут нахилу місцевості по всій довжині)}; момент противаги (дорівнює) = (-1) X (момент гусениці); момент противаги (дорівнює) = (гідравлічному (гідравлічному) тиску) X (площу циліндра) X (довжину плеча моменту противаги) (дорівнює) = (гідравлічному тиску) X (константу Е) X (площу циліндра). Якщо момент противаги, що обчислюється, буде негативним, тобто, гідравлічний циліндр знаходиться під тиском на витягування при визначенні площі циліндра буде потрібен компонент, отриманий відніманням площі штока. Це буде мати місце при перенесенні переднього напрямного колеса і при перенесенні заднього знаряддя на 3-позиційній навісці. При використанні фронтального навантажувача, передній монтажний вузол навантажувача має бути прикріплений до передньої структури, що містить датчики навантаження на 3позиційній навісці. Заднім монтажним вузлом навантажувача має бути горизонтальний сполучний вузол ковзання. Це дасть змогу датчикам навантаження представити дані про горизонтальне зусилля навантажувача. Дані, що характеризують корисне навантаження можуть бути направлені до комп'ютера із застосуванням геометрії навантажувача. Далі пояснюється відхилення режиму рівномірного тиску на ґрунт. Підтримання рівномірного тиску на ґрунт під гусеницями має бути відхилено, якщо навантаження на передню вісь прагне дістатися нуля. Це відбудеться, якщо передня противага виявиться недостатньою. Тому, для передніх осьових навантажень, приблизно, нижче 75 кг на шину, датчик навантаження на передню вісь у шпинделі колеса потребує контролю і регулювання тиску механізму створення моменту противаги таким чином, щоб утримати навантаження на передню вісь вище нуля. Відповідно до застосування, дельта тиску (дорівнює) = (-1) X (константу F) X [(75 2 навантаження)] , тобто для позитивних значень (75 - навантаження) усереднених за останні кілька секунду часу. Наявний тиск дельта складає близько 30000 кПа, що отримано від 15000 кПа поштовхом до 15000 кПа витягуванням. Якщо цей режим відхилення зберігається, на монітор водія має надсилатися повідомлення, у якому пропонується кількість противаги, що слід додати до передньої частини трактора. Основне математичне рівняння, що використовується в контрольно-регулювальному засобі, що може просто включати в себе показаний на фіг. 4D мікропроцесор 13, запрограмований для реалізації балансування згідно винаходу, є підсумовуванням моментів на осьовому стрижні гусеничного механізму, що дорівнює нулю. Кожен гусеничний механізм отримує відповідний момент противаги, визначений за допомогою системи контролю, прикладений за допомогою гідравлічного циліндра 98. Система контролю приймає вхідні сигнали, обчислює і виводить дані про відповідний тиск і напрямок для даного моменту противаги. Різні режими, такі як режим польових робіт або режим руху по шляху, використовують різні вхідні дані для програми контрольно-регулювального засобу. Інші математичні рівняння, використовувані в системі контролю, включають підсумовування сил у вертикальному напрямку, що дорівнює нулю, підсумовування сил моменту у горизонтальному напрямку, що дорівнює нулю, рівняння епюр навантаження, що описує навантаження під кожним з шпинделів гусеничного механізму. Величина моменту противаги і навантаження на зчіпний пристрій спереду і ззаду безпосередньо впливає на навантаження під шпинделями гусеничного механізму. Вага навантажень на привід, напрямне колесо, середні лінії осьових стрижнів і колісний вузол повинна дорівнювати загальному навантаженню на трактор і знаряддя, що переносяться. Вказані виміряні або відомі значення, в свою чергу, забезпечують низьке або нульове обчислене результуюче навантаження на переднє напрямне колесо, в результаті чого, 10 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 навантаження на переднє напрямне колесо має бути визначальним контролюючим фактором в режимі руху по шляху. Більш детально, мікропроцесор системи управління спочатку обчислює момент противаги для прикладання рівномірного навантаження під гусеницями для ситуації у реальному часі. Рух по шляху для ситуацій в реальному часі може варіюватися від перевезення вантажів в передній і / або задній частинах трактора. Ситуація в реальному часі може варіюватися від важких універсальних вантажів, які тягнуть або штовхають на зчіпних пристроях, до ситуацій руху без навантаження взагалі. Система контролю може обчислити, в режимі реального часу, момент противаги для рівномірного розподілу навантаження для будь-якої ситуації у реальному часі для режиму руху по шляху. Для забезпечення розрахунку рівномірного навантаження у режимі реального часу, мікропроцесор має бути скерований, в дорожньому режимі, в рамках своєї програми, на додавання моменту дисбалансу. Мікропроцесор має застосовувати рівняння 11 епюр навантаження. В рівнянні 11, L являє собою відстань у передньому напрямку від заднього шпинделя гусеничного механізму. Якщо гусеничний механізм має 4 шпинделі (наприклад), значення L для кожного шпинделя є відомою, фіксованою величиною, а плече сили для кожного шпинделя на осі повороту гусеничного механізму є відомим, фіксованим значенням. Тому, треба було б розрахунок для P (вертикальне навантаження) зробити за допомогою L 1, L2, L3 і L4: отримуючи P1, P2, P3, і P4. На етапі1, P1, P2, P3, і P4 мають однакові, відомі значення навантаження, тобто, у наявності - рівномірний розподіл навантаження, сума P1, P2, P3, і P4 представляє собою відоме значення у реальному часі. Мікропроцесор додає момент дисбалансу при заданій інтенсивності зростання. Процес додавання моменту дисбалансу не привносить змін у відому суму P1, P2, P3, і P4. Це дозволяє розглядати різні значення P1, P2, P3, і P4 як значення даного навантаження під час дисбалансу. Р4 є навантаженням на передній осі і є цільовим навантаженням, яке підтримують під час режиму руху по шляху. Дане цільове навантаження є константою, що закладена в програму мікропроцесора. P4 знаходиться в контурі зворотного зв'язку і застосовується для зупинки додавання моменту дисбалансу, тобто P4 є контролюючою силою під час додавання моменту дисбалансу. Мікропроцесор підтримує момент дисбалансу, що задовольнив константу, призначений для P4 в режимі руху по шляху. Більшість поверхонь шляхів є як опуклого, так і увігнутого профілю, тому утримування P4 у межах допустимого допуску є динамічним ітераційним процесом. Це означає, що мікропроцесор додає і віднімає величину моменту дисбалансу в режимі реального часу. Вхідні сигнали від короткочасних дорожніх ударів і вибоїн дозволяється не враховувати, тобто усереднюються крупні вхідні дані. Фіг. 13 представляє стандартний двогусеничний трактор 10, що несе 3-позиційне встановлене знаряддя 8. Коли знаряддя 8 опускається, ґрунт підтримує знаряддя, при цьому значно змінюється навантаження (тобто епюр навантаження (LT)) на передні шпинделі гусеничного механізму, як показано. Колеса 9 датчика знаряддя несуть вагу знаряддя 8 під час руху при виконанні польових робот. Як показано, в ситуації статичного положення, підйом 3позиційного навантаження викликає навантаження на передніх шпинделях 14А гусеничного механізму 22 для зміни навантаження від великої ваги до мінімальної ваги або навіть до її відсутності. Передня противага є занадто легкою для безпечного руху по шляху. Ситуація, що ілюструється, ймовірно, стане нестабільною при високих швидкостях під час руху по шляху. Різкий крок, наприклад, може ініціювати серйозний крутий поворот вперед - назад, а також різкі хитання, що наносить шкоди процесу управління трактором. Комп'ютерний аналіз показує, що за певних умов, при поштовхах, що супроводжуються опусканням з висоти 100 мм без задньої підвіски, при типових дорожніх швидкостях двогусеничний трактор стандартної конфігурації повністю відривається від землі. Фіг. 14 показує 3-позиційне навантаження, яке повністю відповідає прикладу здійснення винаходу, зображеному на фіг. 2 і 3, і докладно описано в даному документі. На зображенні у = 2 y = (ax +bx+c) x (змінну). Коли знаряддя 8 опускається і працює, ґрунт підтримує вагу знаряддя. Зокрема, колеса датчика знаряддя несуть навантаження на знаряддя під час польових робіт. Система контролю постійно перевіряє стан безпечної роботи. Система контролю керує ситуацією для обох режимів: режиму здійснення польових робіт і режим руху по шляху. В ході режиму польових робіт і підйому ваги знаряддя мінімальна вага утримується на колісному вузлі, при цьому, в міру необхідності, навантаження на передньому шпинделі гусеничного механізму скорочується. 11 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 60 Під час виконання режиму польових робіт і підйому ваги, якщо система контролю обчислює навантаження на передній шпиндель гусеничного механізму, яке він несе як негативне, інформація висвітлюється на моніторі оператора із зазначенням мінімальної кількості передньої противаги, яка повинна бути додана. Під час режиму дорожнього руху і при застосуванні механізму створення моменту противаги, система контролю забезпечує мінімальне навантаження на колісному вузлі, що необхідно для безпечної експлуатації. Якщо двогусеничний трактор за винаходом має дві системи механізму рульового керування, вони доповнюють одна одну при виході з ладу або деградації однієї з них без додаткових затрат, яких вимагають стандартні двогусеничні конструкції. Якщо механізм диференціального рульового керування має вийти з ладу, передні колеса все ще продовжують здійснювати управління трактором, щоб привести його у стан безпечної зупинки або аварійного режиму на місці дислокації. Якщо передня шина пошкоджена, механізм диференціального рульового керування продовжує здійснювати управління для виконання безпечної зупинки. Фіг. 15 зображує стандартну конструкцію двогусеничного трактора з навісним знаряддям 8', змонтованим у передній частині трактора. Слід зазначити, що навіть коли деяке з фронтально встановленого знаряддя має копіювальні колеса, знаряддя, як правило, знаходяться у підібраному стані під час руху по шляху. Перекидною точкою опори являється переднє напрямне колесо 14 гусеничного механізму. Консольна відстань фронтально змонтованого знаряддя 8', виміряна від шпинделів переднього напрямного колеса, є великою, тому що стандартний двогусеничний трактор, як правило, має розширену носову частину. Навантаження 8', перенесене в передній частині гусеничного механізму, є великим, коли переносяться копіювальні колеса. У контексті даного документу, ознака "великий" означає "важкий", тобто, багато фунтів, наприклад, 2000. 3-позиційні пристрої зчеплення мають деякі характеристики зв'язувань у паралелограмі. Коли верхнє з'єднання розташовано паралельно двом нижнім з'єднанням, 3позиційний навісний пристрій є точною моделлю зв'язувань паралелограму. У цій ситуації і якщо підйомна потужність 3-позиційного навісного пристрою становить, наприклад, 10 тон, пристрій може підняти 10 - тонне знаряддя, незалежно від того, наскільки далеко від точки опори знаходиться центр тяжіння (CG) знаряддя. Важелі працюють за принципом створення великих сил на опори із застосуванням невеликої сили на кінці довгої ручки. Деякі знаряддя (наприклад плуги), приєднані до 3-позиційного пристрою, виконаного із застосуванням зчеплень по типу паралелограму, можуть мати ефект важеля з довгою ручкою. Що стосується фіг. 15, переднє напрямне колесо 14 є точкою опори і може нести вантаж, вага якого в декілька разів більша за вагу знаряддя. Для руху по шляху, у відповідності з даним винаходом великий важкий вантаж ставиться на шини, що мають рисунок протектора, призначений для перевезення важкого вантажу без вібрації і без високих темпів зносу. Знос ременя під час руху по шляху пропорційний кількості піднятого навантаження на передніх напрямних колесах 14. Вібрації, генеровані під передніми напрямними колесами 14, мають великі амплітуди. Коливання великої амплітуди є циклічними. Супроводжуючі сили є циклічними, також циклічним є і рух маси. При вібраціях це може мати відношення до генерування великої пікової сили або до подолання великої відстані до кінців ходу вібрації. Фіг. 16 зображує приклад здійснення двогусеничного трактора за винаходом зі знаряддям 8', змонтованим у передній частині трактора. Перекидна опора 14А в апараті за винаходом або тракторі являє собою вісь 26 передньої шини. Як показано, консольна відстань фронтально змонтованого знаряддя знижується. Гусеничний механізм 22 не несе фронтально змонтованого знаряддя 8'. Колісний вузол несе навантаження в міру необхідності. Показані епюри навантаження(L) під гусеничними механізмами 26. Для польових робіт система контролю підтримує рівномірний розподіл. Для руху по шляху навантаження на переднє напрямне колесо 14 зменшується, щоб запобігти створенню вібрації і знизити знос ременя до мінімуму. Система контролю складається з виділених або загальних датчиків для вводу даних про наступне: - задній зчіпний пристрій і 3-позиційні пристрої навантаження - вертикальні, горизонтальні і навантаження моменту; - передній зчіпний пристрій і 3-позиційні пристрої навантаження-вертикальні, горизонтальні і навантаження моменту; - навантаження на колісному вузлі; - кут повороту колісного вузла; 12 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 60 - руль водія повертає під кутом колісний вузол: застосована модифікована технологія рульового керування зі змінною швидкістю, тому шина з внутрішньої сторони повороту має бути в змозі швидко перейти до 90 градусів; - кут повороту колісного вузла і швидкість транспортного засобу є змінними і такими, що використовуються для визначення швидкості і напрямку обертання електродвигуна механізму диференціального рульового управління; - швидкість і напрямок обертання електродвигуна механізму диференціального рульового управління; - вихідна швидкість трансмісії - паливна вага—розрахована з даних датчика контролю палива; - режим роботи—робота в польових умовах, рух по шляху, функція фронтального навантажувача та інше і - акселерометр активної підвіски колісного вузла. Винахід включає або працює з безліччю констант, необхідних для контрольнорегулювального засобу, що включає наступне: - всі довжини важелів від усіх тензодатчиків навантаження до шпинделя гусеничного механізму - довжина важеля гідравлічного циліндру; - довжина важеля паливного навантаження для осьового стриженя гусеничного механізму; - маса при навантаженні і центр тяжіння (CG) центральної частини трактора; - маса при навантаженні і центр тяжіння (CG) гусеничних механізмів; - розташування осі гусеничного механізму від передніх і задніх шпинделів горизонтальних і вертикальних; - константа диференціального рульового керування – різниця швидкостей: швидкість двигуна до швидкості гусениці; - відстань на всю довжину від осьового стриженя гусеничного механізму до середньої лінії колісного вузла; вага і центр тяжіння (CG) колісного вузла. Маса при навантаженні і горизонтальні центри тяжіння мають певне значення для запобігання відриву від землі передньої частини гусеничних механізмів в режимі руху по шляху. Рівняння підсумовування моментів на осьових стрижнях гусеничного механізму, що дорівнюють нулю, має включати інформацію про масу при навантаженні і горизонтальні центри тяжіння. Система контролю забезпечує вихідні сигнали для наступних цілей: - відповідний тиск і напрямок для лівого і правого бокових циліндрів механізму створення моменту противаги; Коректний напрямок і швидкість двигуна рульового керування, що синхронізує кут повороту колісного вузла і різницю швидкості гусениці; - сигнали та попередження, направлені на монітор водія, що несуть інформацію про переважну кількість противаг для додавання або видалення, в тому числі систему контролю для підтримання гістограми навантаження для останніх кількох хвилин або годин; - певні сигнали ручного управління у зв'язку з тим, що основний режим для роботи в польових умовах є підтримання рівномірного розподілу тиску на ґрунт під гусеницями, де занадто мале навантаження на колісний вузол має привести до генерації сигналу корекції, щоб тримати колісний вузол на землі. Ймовірні ситуації при яких, виробляють сигнал-корекції включають консольне 3-позиційне навісне знаряддя в піднятому положенні, не вистачає противаги і т.д. В режимі корекції, датчик навантаження колісного вузла стає датчиком управління, на який реагує система контролю. Як зазначено, винахід включає в себе засіб, що функціонує як важелі, призначені для переносу більшої кількості навантаження на шпинделі передніх гусениць, що має змусити працювати закони фізики, спрямовані на зменшення навантаження на переднє колесо. За винаходом, вказані два важелі переміщуються гідравлічними циліндрами, забезпечуючи варіювання навантаження на передньому колісному вузлі. Два важеля і два гідравлічних циліндри діють як механізм створення моменту противаги. Конструктивно обидва важелі є невід'ємною частиною основної опорної структури гусеничного механізму. Цей механізм, переважно, розташований поруч із задньою ділянкою, або у положенні, коли трактор як і ручки візка заходяться ззаду: далеко від переднього колеса. Основними конструктивними засобами винаходу є: 1. осьовий стрижень гусеничного механізму, 2. механізм створення моменту противаги і 3. Система контролю, які працюють разом, щоб відвести більшу частину навантаження, яке присутнє на передніх шпинделях 13 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 60 гусеничного механізму під час руху по шляху, і врівноважити гідравлічні циліндри що адекватно реагують на навантаження, прикладені до трактора, і які діють паралельно землі. Тензодатчики навантаження забезпечують введення даних в систему контролю, щоб визначити результуючу величину зазначеного паралельного навантаження. Тягове зусилля, що дорівнює величині даного навантаження, застосовується паралельно землі і на рівні землі, в результаті взаємодії ґрунтозачепів гусеничного механізму і землі. Природним результатом такої ситуації є підняття середньої лінії осьового стриженя гусеничного механізму над землею. Існує момент перекидання, прикладений до осьового стриженя гусеничного механізму, при паралельних навантаженнях, наприклад, при тягових зусиллях на зчіпному пристрої. Такий момент перекидання, індукований прикладанням тягового зусилля, порушує заданий рівномірний розподіл тиску на ґрунт під гусеницями. Закон про дію рівних і протилежно направлених сил допомагає визначити величину моменту перекидання. Система контролю застосовує момент противаги, в результаті чого тиск на ґрунт під гусеницями врівноважується. Система контролю, фіг. 4B, гарантує ситуацію, при якій шини колісного вузла завжди залишаються в контакті з землею. Датчик навантаження в колісному вузлі контролює навантаження, і якщо навантаження наближається до нуля, датчик навантаження сигналізує системі контролю, щоб перейти в режим корекції. Фізичні компоненти системи контролю не показані, за винятком частини тензодатчиків навантаження. Роботу системи контролю вже докладно описано. Мікропроцесор і джгути проводів являються її загальними компонентами. Режим корекції спричинює крутний момент механізму створення моменту противаги для зміщення навантаження з передньої частини гусеничних механізмів на задню частину гусеничних механізмів. Кінцевим результатом цього є направлена вниз реакційна сила або навантаження (L) на колісний вузол, як показано на малюнках. Під час польових робіт, всі трактори, зазвичай, стикаються з перешкодами і ситуаціями, які можуть бути певним чином класифіковані або є результатом текстури поверхні ґрунту або ознак особливостей ландшафту місцевості. Типовими особливостями ландшафту є тераси і водні шляхи. Стандартний двогусеничний трактор наполегливо прагне переміщатися вперед при проходженні крізь різкі опуклі гребені таких особливостей ландшафту, які можуть бути як небезпечними і незручними для водія, так і можуть спричинювати високе навантаження на деякі з компонентів трактора. Двогусеничний трактор за даним винаходом весь час утримує колісний вузол в контакті з землею, уникає крутих рухів або незручної качки трактора і робить їзду більш м'якою. Двогусеничний трактор за винаходом вимагає наявності менш важкої структури ззаду: переміщення центру тяжіння (CG) вперед. Звичайні двогусеничні трактори потребують важких компонентів, розташованих поруч із задньою частиною трактора за структурних і функціональних причин. Але ця велика кількість навантаження в задній частині транспортного засобу, як правило, невигідна для забезпечення заданого центру тяжіння або балансу для трактора і використовується, головним чином, для буксирування вантажів, а не для переміщення важких знарядь в задній частині трактора. Щоб правильно збалансувати трактор для буксирування та / або переміщення розташованих у задній частині вантажів, зазвичай, забезпечують розташовані в передній частині противаги, однак, як правило, це робить трактор важчим, ніж хотілося б. Наслідками появи додаткової ваги є додаткові захисні засоби (ROPS), встановлення яких потребує фінансової підтримки, пов'язано з більшими витратами, більш високим зносом ременя під час руху по шляхах, з більшим ущільненням ґрунту, тощо. Звичайною практикою є залишення передньої противаги на місці протягом часу, який витрачається для переміщення по шляхах. Це часто пов'язано з переміщенням центру тяжіння вперед відносно заданої переважної позиції, доцільної для переміщення по шляхах, і робить більш важкою носову частину трактора. У двогусеничному тракторі за винаходом під час руху по шляхах колісний вузол бере на себе функції рульового керування, оскільки значна кількість навантаження на колісний вузол пов'язана зі значною кількістю тягового зусилля коли шини розташовані під кутом. Таким чином, зміна напрямку під час руху по шляхах є результатом спільних зусиль механізму диференціального рульового керування і латеральної сили, яку створює колісний вузол. Двогусеничний трактор за винаходом також має перевагу в тому, що він забезпечує додатковий фактор безпеки в певних ситуаціях. Наприклад, навантажений візок, штовхаючи трактор вниз із пагорба, може потребувати гальмівних зусиль, які наближаються до максимальної тягової спроможності гусениці. Диференціальне рульове керування вимагає, щоб гусениці забезпечували тягові зусилля, з метою регулювання переміщення. Під час руху по шляхах, якщо будь-яка комбінація ситуацій перевищує тягову спроможність гусеничного 14 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 механізму, то регулювальна спроможність рульового колісного вузла забезпечує резервне управління. Повертаючись до фіг. 14 і ситуації з перенесенням великого 3-позиційного (3-точкового) навантаження під час руху по шляху, мінімальне навантаження, на яке запрограмована система контролю відносно колісного вузла, забезпечує колісний вузол можливістю адекватно повертати трактор при безпечному рульовому керуванні під час руху по шляху. Двогусеничний трактор за винаходом, як описано вище, включає в себе дві системи рульового керування. Диференціальне рульове керування є основною системою. Незважаючи на те, що колісний вузол включено не тільки для рульового керування, він, дійсно, має спроможності рульового керування типу Акерман. Одним з призначень колісного вузла є перенесення навантаження передньої частини гусеничних механізмів, рухаючись по шляху. Інше призначення полягає в перенесенні передніх навісних знарядь. Ще одне призначення полягає у зменшенні качання. Іншим призначенням колісного вузла є реагувати на зміни ситуації під час руху, що дозволяє механізму створення моменту противаги забезпечувати рівномірний тиск на ґрунт. Оскільки колісний вузол несе значну кількість навантаження під час руху по шляху, латеральні тягові зусилля шин, природно, спричинюють виникнення зусилля в механізмі рульового керування. Колісний вузол являє собою резервну систему рульового керування для трактора під час руху по шляху. Як показано на фіг. 10, система підвіски типу штовхаючої штанги для осьового стрижня гусеничного механізму пропонується як частина вузла системи підвіски. Переважними колесами для колісного вузла, розташованого попереду, є пара пневматичних шин, що мають характеристики підвіски. Колісний вузол має центральний осьовий стрижень для поперечних коливань і систему підвіски, розраховану на два режими, що приєднує його до основної опорної структури: в активному і пасивному режимах. (Фіг. 4C (права сторона) на першому плані демонструє систему передньої осі). Звертаючись знову до фіг. 13 і фіг. 14, відмічаємо, що загальний центр тяжіння розташований ближче до задньої частини гусеничних механізмів, коли навантаження переноситься на 3-позиційний навісний пристрій. У стандартному двогусеничному тракторі (фіг. 13), таке розташування, природно, спричинює збільшення навантаження на задні шпинделі. Природною опорою є задній шпиндель. Для покращеної конструкції природною точкою опори є осьовий стрижень гусеничного механізму, значно переміщений уперед відносно заднього шпинделя. З цієї причини, навантаження на задніх шпинделях двогусеничного трактора за винаходом має бути збільшено для поглинання і попередження надмірної передньої противаги. У відповідності з винаходом, заднім шпинделям гусеничних механізмів додається жорсткості, за рахунок встановлення акумулятора в гідравлічний контур механізму моменту противаги. Ступінь жорсткості є основною характеристикою будь-якої системи підвіски, що покращує якість їзди, як описано вище. Така конструкція дозволяє заднім шпинделям гусеничних механізмів мати низьку ступінь жорсткості і переміщатися / коливатися вгору і вниз по відношенню до основної опорної структури трактора. Жорсткість являє собою число одиниць сили, необхідне для стиснення пружини на одну одиницю довжини. Взагалі кажучи, найбільш поширені системи підвісок відносяться до категорії пасивних. Колісний вузол є перший елемент з досвідом так званої "першої зустрічі" про те, через що трактор збирається пройти. Текстура поверхні ґрунту може варіюватися від дуже гладкої до текстури з крупним інтервалом, з жорсткими шматками ґрунту, доставленого на поверхню, наприклад, розпушувачем, до випадкових канав через ерозію, до борозен, створених ґрунтообробними знаряддями в інших ситуаціях. Місцевість може мінятися від підйомів угору до опускань з гори, в бік пагорба від увігнутої до опуклої конфігурації. В усіх цих ситуаціях, двогусеничний трактор за даним винаходом працює добре, і водій почуває себе комфортно. Під час польових робіт, описані вище текстури поверхні можуть спонукати трактор на виконання певної комбінації дій, наприклад, таких дій, як тангаж, крен, стрибок і ривок. Двогусеничний трактор даного винаходу використовує комбінацію з деяких описаних вище ознак для того, щоб значно зменшити тангаж, крен, стрибок і ривок, в тому числі, коливання гусеничного механізму, підвіски гусеничного механізму включаючи активну підвіску для колісного вузла. Під час руху по шляху текстура поверхні землі, як правило, є гладкою з випадковою незначною шорсткістю. Трактори мають можливість буксирування знаряддя, взагалі, без підвіски на повній швидкості. Допускається, очікується і є необхідним уповільнення руху на 15 UA 115048 C2 5 10 15 20 25 30 35 40 45 50 55 60 другорядних дорогах, що погано обслуговуються. Тому фермерські трактори не потребують "військових підвісок". Колісний вузол, як правило, є легко навантаженим, коли використовують встановлене в задній частині знаряддя, призначене для виконання таких польових робіт як розпушування, і він є сильно завантаженим під час руху по шляху, або при застосуванні певного фронтально встановленого знаряддя, або перевозячи вантажі і продовольство, розташовані в передній частині. Двогусеничний трактор за даним винаходом застосовує комбінацію активних і пасивних підвісок, як описано вище. Що стосується великих навантажень під час руху по шляху і застосування певного фронтально встановленого важкого знаряддя під час польових робіт, елементів контролю пасивною підвіскою: переважно з використанням однієї або більше пар гумових прокладок, доповнених, переважно, пневматичними шинами без живлення, що мають протектори, призначені для їзди по шосе, слід вказати на наступне. В режимі руху по шляху, активна підвіска колісного вузла, переважно, деактивована. Для більшості видів обробки ґрунту під час польових робіт, активна підвіска працює з парами гумових прокладок, розміщених з певними інтервалами, величину яких встановлюють, в міру необхідності, для заданого збільшення ходу системи активної підвіски (дивись вище). Качання, що повторюються, і пов'язані з ним ривки, спричинені текстурою поверхні ґрунту, практично повністю усуваються системою активної підвіски, що застосовується на двогусеничному тракторі за даним винаходом. Для обходу випадкових увігнутих ритвин, заподіяних водними шляхами, або опуклих хребтів, хід активної підвіски відбувається послідовно з коливанням осьового стриженя гусеничного механізму, що відчуває на собі дію механізму створення моменту противаги. Активна підвіска допомагає згладити відчуття нерівностей текстури поверхні, а також увігнутий чи опуклий рельєф місцевості. Водій любить плавну їзду. Поєднання конкретної нової конструкції основної опорної структури трактора для підключення різних елементів осьового поворотного стрижня, елементів підвісок, різних датчиків, компонентів гідравлічних систем та систем рульового керування, причому всі ці компоненти контролюються певним унікальним програмним забезпеченням, інстальованим у мікропроцесорі для забезпечення високого рівня інтеграції людина-машина, невідомо з рівня техніки, що стосується сільськогосподарського трактора або будь-якого іншого відомого трактора. Даний винахід не виключає повного використання активної підвіски для колісного вузла. Однак описана підвіска для подвійного режиму є більш прийнятною для практичного застосування, а пасивний режим, як правило, є достатнім для ситуацій, що потребують застосування важко навантаженого колісного вузла. Фізичний розмір деяких з компонентів активної підвіски є набагато більшим, якщо в конструкції немає також і пасивної підвіски, такої як гумові пружні прокладки (колодки). Що стосується двогусеничного трактора за даним винаходом, незначне навантаження на колісному вузлі з активною підвіскою, що, зазвичай, характерно для режиму виконання польових робіт, зумовлює зменшення розміру компонентів і скорочення споживаної енергії. Двогусеничний трактор за даним винаходом функціонує з вирішенням технічної задачі, яка полягає в тому, що застосування винаходу забезпечує здійснення контролю колісного вузла для забезпечення сприйняття будь-якого навантаження, введеного фронтально встановленим знаряддям або іншим навантаженням передньої частини конструкції. Деяке фронтально встановлене знаряддя, наприклад, навантажувачі, надають великої кількості навантаження на колісний вузол. Інше фронтально встановлене знаряддя використовується для не навантаженої обробки ґрунту і, отже, його робота пов'язана із застосуванням іншої кількості навантаження. Під час поворотних маневрів, опір відхиленню від курсу може бути спричинений поєднанням деяких чинників, в тому числі, інерції, бокового нахилу і особливостей взаємодії певного ґрунту із компонентами землерийного знаряддя. Для знаряддя, що має широку наземну частину, виникає нерівномірне навантаження на зчіпний пристрій у поперечному напрямку, якому рульове керування має протидіяти, щоб зберегти передбачувану траєкторію руху трактора. Двогусеничний трактор за даним винаходом включає в себе колісний вузол, як додатковий механізм рульового керування всякий раз, коли на колісному вузлі виникає навантаження. Під час маневру розвороту існує також ефект поперечного, горизонтального консольного навантаження. Що стосується системи диференціального рульового керування стандартного двогусеничного трактора, відстань консолі вимірюється, приблизно, від центру, що лежить на осьовій лінії уздовж гусеничних механізмів. Що стосується двогусеничного трактора за даним винаходом, відстань консолі диференціального рульового керування є майже такою ж, але 16 UA 115048 C2 5 10 15 20 25 додаткові зусилля рульового керування, що забезпечені колісним вузлом, мають меншу латеральну відстань консолі. Консольні передні і задні навантаження і відповідні інерції, як правило, намагаються створити стрибок, який зазвичай позбавлений ривка на гладких поверхнях. Згасання стрибка забезпечується системою підвіски "штовхаючої" штанги і систем підвісок колісного вузла. Колісний вузол двогусеничного трактора за даним винаходом робить можливим підйом фронтальної частини гусеничних механізмів. Це знижує риск проникнення деяких ґрунтозачепів у ґрунт. Гусеничні механізми мають ковзати убік, з метою зміни напрямку. При різкому повороті, стандартний двогусеничний трактор має тенденцію сильно пошкоджувати поверхню ґрунту через проникнення ґрунтозачепів у поєднанні з боковим ковзанням. На відміну, двогусеничний трактор за даним винаходом значно зменшує пошкодження ґрунту. Система контролю двогусеничного трактора за даним винаходом незалежно варіює момент - утворюючий гідравлічний тиск, прикладений до кожного гусеничного механізму, як вже було докладно описано вище. Така незалежність є вигідною при поворотах під навантаженням, коли зовнішній гусеничний механізм потребує вироблення додаткового тягового зусилля. Механізм диференціального рульового керування робить це можливим. Підйом тільки передньої частини внутрішнього гусеничного механізму, що виробляє менше тягове зусилля, зменшує опір боковому повороту. Зовнішній гусеничний механізм часто потребує підтримування рівномірного тиску на ґрунт, щоб максимізувати свою тягову спроможність для здійснення повороту. Двогусеничний трактор за винаходом вирішує цю задачу. Сигнал і команда на виконання незалежного варіювання двох моментів противаг може виходити від датчика кута колісного вузла за деяких інших умов, які сприяють вирішенню поставленої задачі. Незважаючи на те, що винахід був описаний відносно його переважного прикладу здійснення, слід розуміти, що можлива реалізація багатьох інших модифікацій, у зв'язку з якими можуть бути внесені еквівалентні зміни, за умови збереження суті та обсягу захисту даного винаходу, як тут описано. ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 1. Двогусеничний трактор, який включає: - основну опорну структуру (23, 54, 86); - контрольну станцію, що забезпечена засобами управління трактором; - систему ходової частини, що має один лівосторонній гусеничний механізм (12, 22) і один правосторонній гусеничний механізм (12, 22), при цьому дані гусеничні механізми (12, 22) приєднані до основної опорної структури (23, 54, 86); - колісний вузол, що містить одне (42) або кілька коліс (42), розташованих перед гусеничними механізмами (12, 22); - трансмісію для забезпечення руху обох гусеничних механізмів (12, 22) на одних і тих же або різних швидкостях, який відрізняється тим, що містить: - засіб прикладання сили для переміщення вертикального навантаження назад і вперед між передньою частиною гусеничних механізмів (12, 22) і колісним вузлом (26); - засіб регулювання кількості навантаження на колісний вузол (26); - засіб, що спричиняє або дозволяє рух колеса (42) або коліс (42) колісного вузла (26) по кривій траєкторії руху трактора, визначеній різницею у швидкостях гусениць між першим і другим гусеничними механізмами (12, 22). 2. Трактор за п. 1, в якому засіб прикладання сили містить механізм створення моменту противаги (84). 3. Трактор за п. 1, в якому засіб регулювання кількості навантаження на колісний вузол (26) включає контрольно-регулювальний засіб або систему контролю. 4. Трактор за п. 1, в якому засіб, що спричиняє або дозволяє колесу (42) або колесам (42) колісного вузла (26) рухатися по кривій траєкторії руху трактора, визначеній різницею у швидкостях гусениць, включає контрольно-регулювальний засіб або систему контролю. 5. Трактор за п. 1, в якому підвіска передньої осі включає систему активної підвіски. 6. Двогусеничний трактор, що містить - пару гусеничних механізмів (12, 22), які оснащені гумовими гусеничними стрічками з ґрунтозачепами та з’єднані між собою за допомогою відповідних передніх і задніх осей, що проходять, по суті, перпендикулярно напрямку руху; 17 UA 115048 C2 5 10 15 20 25 - передній колісний вузол (26), який відрізняється тим, що містить контрольно-регулювальний засіб, який автоматично керує навантаженням на передній колісний вузол (26), для регулювання навантаження на передню вісь гусеничних механізмів (12, 22) для мінімізації зносу гумового протектора. 7. Двогусеничний трактор за п. 6, у якому контрольно-регулювальний засіб призначений для регулювання величини кута повороту для підтримання правильного вирівнювання під час повороту навколо своєї осі. 8. Двогусеничний трактор за п. 6, у якому контрольно-регулювальний засіб призначений для регулювання навантаження при перенесенні переднього навісного знаряддя (8'). 9. Двогусеничний трактор за п. 6, у якому гусеничні механізм (12, 22) і передній колісний вузол (26) мають відповідні епюри навантаження, регульовані контрольно-регулювальним засобом. 10. Двогусеничний трактор за п. 6, у якому гусеничні механізми (12, 22) встановлені на осьових стрижнях (27, 60, 78) таким чином, щоб момент прикладався до гусеничних механізмів (12, 22) через гідравлічний циліндр (25, 82, 98) з плечем сили. 11. Двогусеничний трактор за п. 6, у якому передній колісний вузол (26) встановлений з можливістю взаємодії з моментами, генерованими навколо осьового стрижня гусеничного механізму (27, 60, 76). 12. Двогусеничний трактор за п. 6, який включає пружні елементи (56) для підвіски гусеничних механізмів (12, 22). 13. Двогусеничний трактор за п. 12, який містить акумулятор (А) для підвіски гусеничних механізмів (12, 22). 14. Двогусеничний трактор за п. 6, який додатково включає датчики (29, 48, 94), при цьому контрольно-регулювальний засіб призначений для отримання і опрацювання сигналів, що надходять від датчиків (29, 48, 94). 15. Двогусеничний трактор за п. 6, у якому кожний з двох гусеничних механізмів (12, 22) є приєднаним до гідравлічного циліндра (25, 82, 98), при цьому інший кінець гідравлічного циліндра (25, 82, 98) є приєднаним до основної опорної структури (23, 54, 86) трактора. 18 UA 115048 C2 19 UA 115048 C2 20 UA 115048 C2 21 UA 115048 C2 22 UA 115048 C2 23 UA 115048 C2 24 UA 115048 C2 25 UA 115048 C2 26 UA 115048 C2 Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 27
ДивитисяДодаткова інформація
Назва патенту англійськоюAn improved configuration of a two-track tractor
Автори англійськоюJanzen, David C., Statzler, Ronald L.
Автори російськоюЯнцэн Давид С., Штатцлер Роналд Л.
МПК / Мітки
МПК: B62D 55/02, B60G 17/016, B62D 11/24, B62D 55/116, B62D 49/06, B62D 11/10
Мітки: двогусеничний, трактор, варіанти
Код посилання
<a href="https://ua.patents.su/29-115048-dvogusenichnijj-traktor-varianti.html" target="_blank" rel="follow" title="База патентів України">Двогусеничний трактор (варіанти)</a>
Газобалонний колісний трактор

Номер патенту: 62050
Опубліковано: 15.12.2003
Автори: Улексін Василь Олексійович, Єлісеєнко Інна Анатоліївна, Бабич Олександр Сергійович, Кухаренко Петро Михайлович
МПК: B60K 15/03
Мітки: газобалонний, колісний, трактор
Формула / Реферат:
Газобалонний колісний трактор, що містить спеціальні касети для кріплення газових балонів високого тиску, який відрізняється тим, що спеціальні касети з газовими балонами високого тиску закріплені з зовнішнього боку задніх ведучих коліс на продовжувачі півосі через підшипники і зафіксовані від обертання кронштейнами, зв'язаними з остовом трактора.
Трактор колісний
Номер патенту: 1903
Опубліковано: 15.07.2003
Автори: Орловський Сергій Анатолійович, Сергеєв Сергій Адольфович, Снегірьов Ігор Лукич
МПК: B60K 17/34
Формула / Реферат:
1. Трактор колісний, що містить півраму, з'єднану з переднім ведучим мостом, що має привід і на який установлений двигун, муфту зчеплення, коробку зміни передач з редуктором і карданний вал, який відрізняється тим, що передній ведучий міст оснащений приводом, розташованим у центральній його частині.2. Трактор колісний за п. 1, який відрізняється тим, що передній ведучий міст з'єднаний з редуктором коробки зміни передач карданним валом...
Трактор мтз з переднім навісним механізмом
Номер патенту: 59653
Опубліковано: 25.05.2011
Автори: Тюлєв Віталій Сергійович, Мітков Василь Борисович
МПК: A01B 63/00, B62D 63/00
Мітки: механізмом, мтз, навісним, переднім, трактор
Формула / Реферат:
Трактор МТЗ з переднім навісним механізмом, що складається з кабіни, рами, двигуна, коліс та коробки перемикання передач, на якій встановлено задній навісний механізм, який відрізняється тим, що спереду рами трактора приєднані перехідна рамка навісного механізму, на якій встановлені передні важелі підйому, центральна тяга та гідроциліндр, який з'єднаний з гідросистемою трактора, та розпірні планки, які з'єднують перехідну рамку навісного...
Планувальник навісний на трактор
Номер патенту: 5595
Опубліковано: 28.12.1994
Автори: Дольницький Ярема Богданович, Ославська Надія Миколаївна, Харченко Віктор Лукич, Дзюбак Іван Опанасович, Руденький Михайло Вікторович
МПК: E02F 3/76
Мітки: трактор, планувальник, навісний
Формула / Реферат:
(57) Планировщик навесной на трактор, включающий базовый трактор, отвал, гидроцилиндры, шарнирно соединенные с отвалом и с кронштейном, который жестко прикреплен к передней части полурамы трактора, толкающие брусья, шарнирно соединенные с дополнительными кронштейнами, жестко прикрепленными к задней части полурамы, отличающийся тем, что дополнительные кронштейны жестко соединены между собой и выполнены L-образной формы, горизонтальные...
Трактор
Номер патенту: 22730
Опубліковано: 25.04.2007
Автор: Трофімченко Олександр Олександрович
МПК: B60K 17/28
Мітки: трактор
Формула / Реферат:
Трактор, що містить раму, задній міст і механізм відбору потужності, що має встановлений на рамі редуктор із ведучим і веденим валами, передній карданний вал, з'єднаний з роздавальною коробкою трансмісії трактора, і задній карданний вал, який відрізняється тим, що редуктор встановлений перед заднім мостом трактора, передній і задній карданні вали з'єднані відповідно із ведучим і веденим валами редуктора, а на кінці рами за заднім мостом...
Попередній патент: Лактамні похідні як інгібітори мутантної idh1
Наступний патент: Аерозолеутворювальний виріб, що має аерозолеохолоджувальний елемент
Випадковий патент: Вітродвигун