Пристрій контролю параметрів посадки і міцності плавспоруди
Номер патенту: 11613
Опубліковано: 16.01.2006
Автори: Гордєєв Борис Миколайович, Кузьменко Олександр Вікторович, Жуков Юрій Даниїлович
Формула / Реферат
1. Пристрій контролю параметрів посадки і міцності плавспоруди, що містить як мінімум чотири датчики контролю осадки, крена, диферента, електрично з'єднаних через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, який відрізняється тим, що додатково приєднані не менше чотирьох датчиків стрілок прогину, двох датчиків деформації корпусу, група датчиків рівня в баластових відсіках, при цьому датчики стрілок прогину розміщені між датчиками осадки й диферента уздовж бортів плавспоруди, а датчики деформації закріплені на обох бортах уздовж корпусу плавспоруди.
2. Пристрій за п. 1, який відрізняється тим, що містить звукову та візуальну сигналізації.
Текст
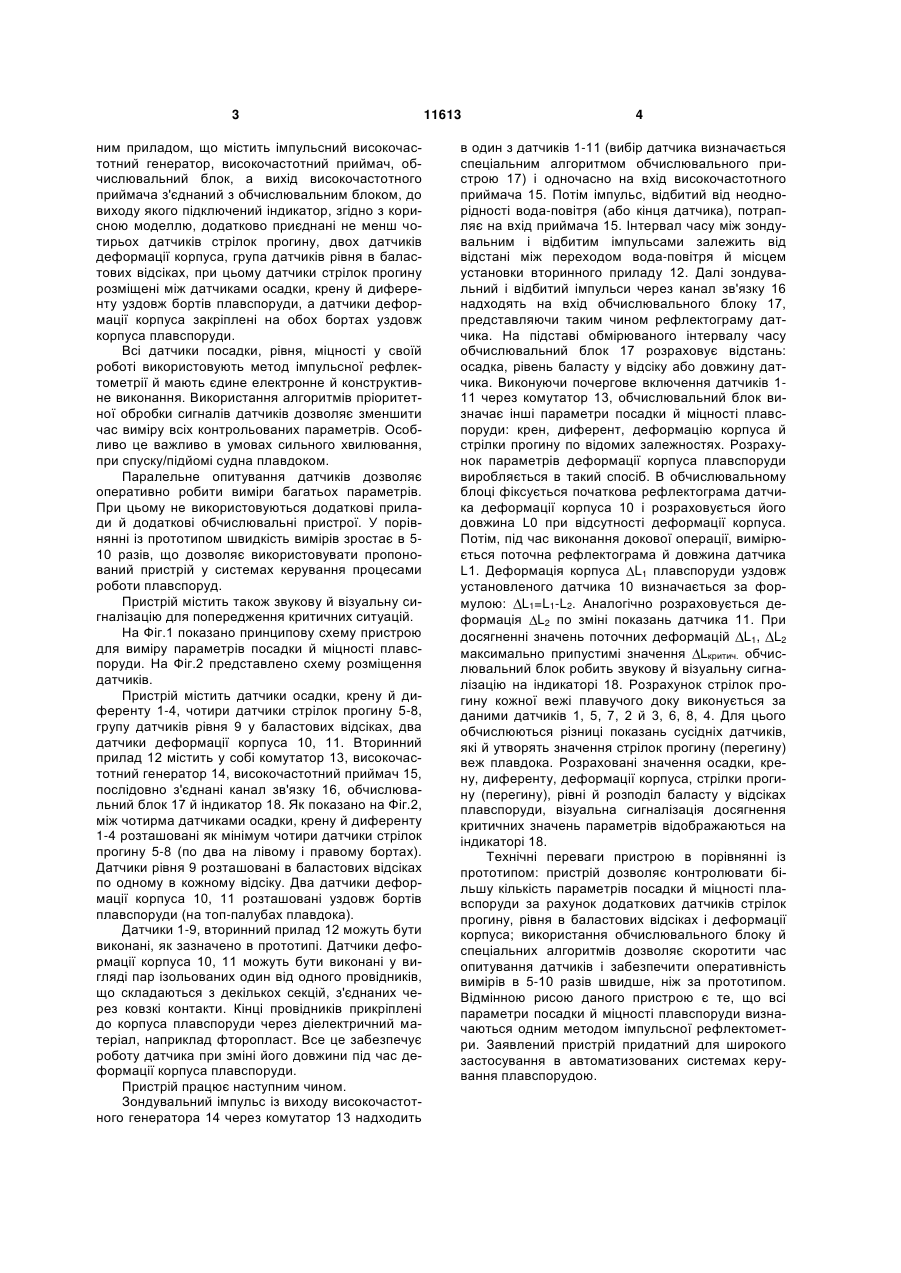
1. Пристрій контролю параметрів посадки і міцності плавспоруди, що містить як мінімум чотири датчики контролю осадки, крена, диферента, електрично з'єднаних через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, об 3 ним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, згідно з корисною моделлю, додатково приєднані не менш чотирьох датчиків стрілок прогину, двох датчиків деформації корпуса, група датчиків рівня в баластових відсіках, при цьому датчики стрілок прогину розміщені між датчиками осадки, крену й диференту уздовж бортів плавспоруди, а датчики деформації корпуса закріплені на обох бортах уздовж корпуса плавспоруди. Всі датчики посадки, рівня, міцності у своїй роботі використовують метод імпульсної рефлектометрії й мають єдине електронне й конструктивне виконання. Використання алгоритмів пріоритетної обробки сигналів датчиків дозволяє зменшити час виміру всіх контрольованих параметрів. Особливо це важливо в умовах сильного хвилювання, при спуску/підйомі судна плавдоком. Паралельне опитування датчиків дозволяє оперативно робити виміри багатьох параметрів. При цьому не використовуються додаткові прилади й додаткові обчислювальні пристрої. У порівнянні із прототипом швидкість вимірів зростає в 510 разів, що дозволяє використовувати пропонований пристрій у системах керування процесами роботи плавспоруд. Пристрій містить також звукову й візуальну сигналізацію для попередження критичних ситуацій. На Фіг.1 показано принципову схему пристрою для виміру параметрів посадки й міцності плавспоруди. На Фіг.2 представлено схему розміщення датчиків. Пристрій містить датчики осадки, крену й диференту 1-4, чотири датчики стрілок прогину 5-8, групу датчиків рівня 9 у баластових відсіках, два датчики деформації корпуса 10, 11. Вторинний прилад 12 містить у собі комутатор 13, високочастотний генератор 14, високочастотний приймач 15, послідовно з'єднані канал зв'язку 16, обчислювальний блок 17 й індикатор 18. Як показано на Фіг.2, між чотирма датчиками осадки, крену й диференту 1-4 розташовані як мінімум чотири датчики стрілок прогину 5-8 (по два на лівому і правому бортах). Датчики рівня 9 розташовані в баластових відсіках по одному в кожному відсіку. Два датчики деформації корпуса 10, 11 розташовані уздовж бортів плавспоруди (на топ-палубах плавдока). Датчики 1-9, вторинний прилад 12 можуть бути виконані, як зазначено в прототипі. Датчики деформації корпуса 10, 11 можуть бути виконані у вигляді пар ізольованих один від одного провідників, що складаються з декількох секцій, з'єднаних через ковзкі контакти. Кінці провідників прикріплені до корпуса плавспоруди через діелектричний матеріал, наприклад фторопласт. Все це забезпечує роботу датчика при зміні його довжини під час деформації корпуса плавспоруди. Пристрій працює наступним чином. Зондувальний імпульс із виходу високочастотного генератора 14 через комутатор 13 надходить 11613 4 в один з датчиків 1-11 (вибір датчика визначається спеціальним алгоритмом обчислювального пристрою 17) і одночасно на вхід високочастотного приймача 15. Потім імпульс, відбитий від неоднорідності вода-повітря (або кінця датчика), потрапляє на вхід приймача 15. Інтервал часу між зондувальним і відбитим імпульсами залежить від відстані між переходом вода-повітря й місцем установки вторинного приладу 12. Далі зондувальний і відбитий імпульси через канал зв'язку 16 надходять на вхід обчислювального блоку 17, представляючи таким чином рефлектограму датчика. На підставі обмірюваного інтервалу часу обчислювальний блок 17 розраховує відстань: осадка, рівень баласту у відсіку або довжину датчика. Виконуючи почергове включення датчиків 111 через комутатор 13, обчислювальний блок визначає інші параметри посадки й міцності плавспоруди: крен, диферент, деформацію корпуса й стрілки прогину по відомих залежностях. Розрахунок параметрів деформації корпуса плавспоруди виробляється в такий спосіб. В обчислювальному блоці фіксується початкова рефлектограма датчика деформації корпуса 10 і розраховується його довжина L0 при відсутності деформації корпуса. Потім, під час виконання докової операції, вимірюється поточна рефлектограма й довжина датчика L1. Деформація корпуса L1 плавспоруди уздовж установленого датчика 10 визначається за формулою: L1=L1-L2. Аналогічно розраховується деформація L2 по зміні показань датчика 11. При досягненні значень поточних деформацій L1, L2 максимально припустимі значення Lкритич. обчислювальний блок робить звукову й візуальну сигналізацію на індикаторі 18. Розрахунок стрілок прогину кожної вежі плавучого доку виконується за даними датчиків 1, 5, 7, 2 й 3, 6, 8, 4. Для цього обчислюються різниці показань сусідніх датчиків, які й утворять значення стрілок прогину (перегину) веж плавдока. Розраховані значення осадки, крену, диференту, деформації корпуса, стрілки прогину (перегину), рівні й розподіл баласту у відсіках плавспоруди, візуальна сигналізація досягнення критичних значень параметрів відображаються на індикаторі 18. Технічні переваги пристрою в порівнянні із прототипом: пристрій дозволяє контролювати більшу кількість параметрів посадки й міцності плавспоруди за рахунок додаткових датчиків стрілок прогину, рівня в баластових відсіках і деформації корпуса; використання обчислювального блоку й спеціальних алгоритмів дозволяє скоротити час опитування датчиків і забезпечити оперативність вимірів в 5-10 разів швидше, ніж за прототипом. Відмінною рисою даного пристрою є те, що всі параметри посадки й міцності плавспоруди визначаються одним методом імпульсної рефлектометри. Заявлений пристрій придатний для широкого застосування в автоматизованих системах керування плавспорудою. 5 Комп’ютерна верстка Д. Шеверун 11613 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of parameters of draught and strength of floating facility
Автори англійськоюHordeiev Borys Mykolaiovych, Zhukov Yurii Danylovych
Назва патенту російськоюУстройство контроля параметров посадки и прочности плавсредства
Автори російськоюГордеев Борис Николаевич, Жуков Юрий Данилович
МПК / Мітки
МПК: B63B 39/00
Мітки: міцності, контролю, параметрів, посадки, плавспоруди, пристрій
Код посилання
<a href="https://ua.patents.su/3-11613-pristrijj-kontrolyu-parametriv-posadki-i-micnosti-plavsporudi.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю параметрів посадки і міцності плавспоруди</a>
Пристрій для контролю параметрів стрілових кранів
Номер патенту: 367
Опубліковано: 19.07.1999
Автори: Столбиков Станіслав Григорійович, Андрієнко Миколай Миколайович, Усанов Володимир Миколайович, Кузвесов Віктор Георгійович
МПК: B66C 23/90
Мітки: параметрів, пристрій, контролю, кранів, стрілових
Формула / Реферат:
Пристрій для контролю параметрів стрілових кранів, що містить корпус Із розташованими в ньому аналого-цифровим перетворювачем, цифровим обчислювальним ! цифровим запам'ятовуючим блоками, виконаними у вигляді плати, встановленої паралельно одній зі сторін корпуса, датчики аналогових І дискретних параметрів І сигналів крана, розташовані поза корпусом, причому один з Інформаційних входів цифрового обчислювального блока з'єднаний Із виходом...
Пристрій для контролю параметрів стрілових кранів
Номер патенту: 2473
Опубліковано: 15.04.2004
Автори: Андрієнко Миколай Миколайович, Фунд Володимир Германович, Столбиков Станіслав Григорійович, Кузвесов Віктор Георгійович, Усанов Володимир Миколайович
МПК: B66C 23/90
Мітки: пристрій, параметрів, контролю, кранів, стрілових
Формула / Реферат:
Пристрій для контролю параметрів стрілових кранів, що містить корпус із розташованими в ньому аналого-цифровим перетворювачем, цифровим обчислювальним і цифровим запам'ятовуючим блоками, виконаними у вигляді плати, встановленої паралельно одній із сторін корпуса, причому один із інформаційних входів цифрового обчислювального блока з'єднаний із виходом аналого-цифрового перетворювача, другий, двоспрямований, - із входом і виходом цифрового...
Пристрій контролю параметрів зернозбирального комбайна
Номер патенту: 50349
Опубліковано: 15.10.2002
Автори: Шамановський Олександр Дмитрович, Шамановський Анатолій Дмитрович
МПК: A01D 41/12, G05B 15/00
Мітки: контролю, параметрів, зернозбирального, комбайна, пристрій
Формула / Реферат:
1. Пристрій контролю параметрів зернозбирального комбайна, що містить датчики, у тому числі «інтелектуальні», елементи аварійної, звукової і світлової сигналізації і шину інтерфейсу, підключені до термінала з дисплеєм і функціональними кнопками, який відрізняється тим, що термінал виконаний у вигляді потужного швидкодіючого мікроконтролера, а дисплей - у вигляді графічної рідкокристалічної індикаторної панелі, також введена схема тестування,...
Пристрій контролю параметрів насосної установки
Номер патенту: 55324
Опубліковано: 17.03.2003
Автори: Сісюк Генадій Юрійович, Родькін Дмитро Йосипович, Пасмурских Олександр Олексійович, Чорний Олексій Петрович, Коренькова Тетяна Валеріївна, Луговой Анатолій Васильович
МПК: F04D 15/00
Мітки: контролю, пристрій, параметрів, установки, насосної
Формула / Реферат:
Пристрій контролю параметрів насосної установки, що містить перетворювач для живлення силового кола двигуна, асинхронний двигун, відцентровий насос, який відрізняється тим, що додатково обладнаний датчиком потужності на затискачах статора асинхронного двигуна, датчиками струму статора, напруги і частоти, першим, другим і третім суматорами, блоком визначення втрат двигуна, обчислювальним блоком для визначення фактичних параметрів насосної...
Тренажер для навчання і контролю оптимальної посадки водія
Номер патенту: 68346
Опубліковано: 16.08.2004
Автори: Сирота Вячеслав Михайлович, Сирота Ігор Вячеславович, Шолом Віктор Лазаревич, Ставцев Валерій Васильович
МПК: G09B 9/04
Мітки: оптимальної, посадки, контролю, водія, тренажер, навчання
Формула / Реферат:
1. Тренажер для навчання і контролю оптимальної посадки водія, що містить регульоване сидіння, кермове колесо, блок сигналізації та обробки інформації, світлоінформатор у вигляді екрана і зв’язані з останнім датчики положення рук водія на кермовому колесі, який відрізняється тим, що він додатково містить приладдя у вигляді сукупності екзоскелетів, закріплених на ліктьових і колінних суглобах рук і ніг, обладнаних датчиками положення у вигляді...
Попередній патент: Спосіб місцевого лікування деструктивних форм туберкульозу легень
Наступний патент: Протиугінний пристрій
Випадковий патент: Пристрій для обліку молока при доїнні