Електропривод постійного струму
Номер патенту: 15301
Опубліковано: 30.06.1997
Автори: Садовой Олександр Валентинович, Сохіна Юлія Віталіївна
Формула / Реферат
Электропривод постоянного тока, содержащий электродвигатель, подключенный к управляемому преобразователю, в цепь управления которого включены последовательно соединенные регуляторы скорости и тока, входы которых соединены соответственно с датчиками скорости и тока, отличающийся тем, что он дополнительно снабжен включенным между регулятором тока и входом управляемого преобразователя регулятором напряжения, вход которого соединен с датчиком напряжения, причем каждый регулятор образован последовательно включенными сумматором, корректирующим устройством, выполненным в виде пропорционально-дифференцирующего звена, релейным элементом и интегратором, при этом первые входы сумматоров являются входами для подключения задающего устройства или выхода предыдущего регулятора, вторые входы сумматоров - входами регуляторов для подключения датчиков, а выходы интеграторов - выходами регуляторов.
Текст
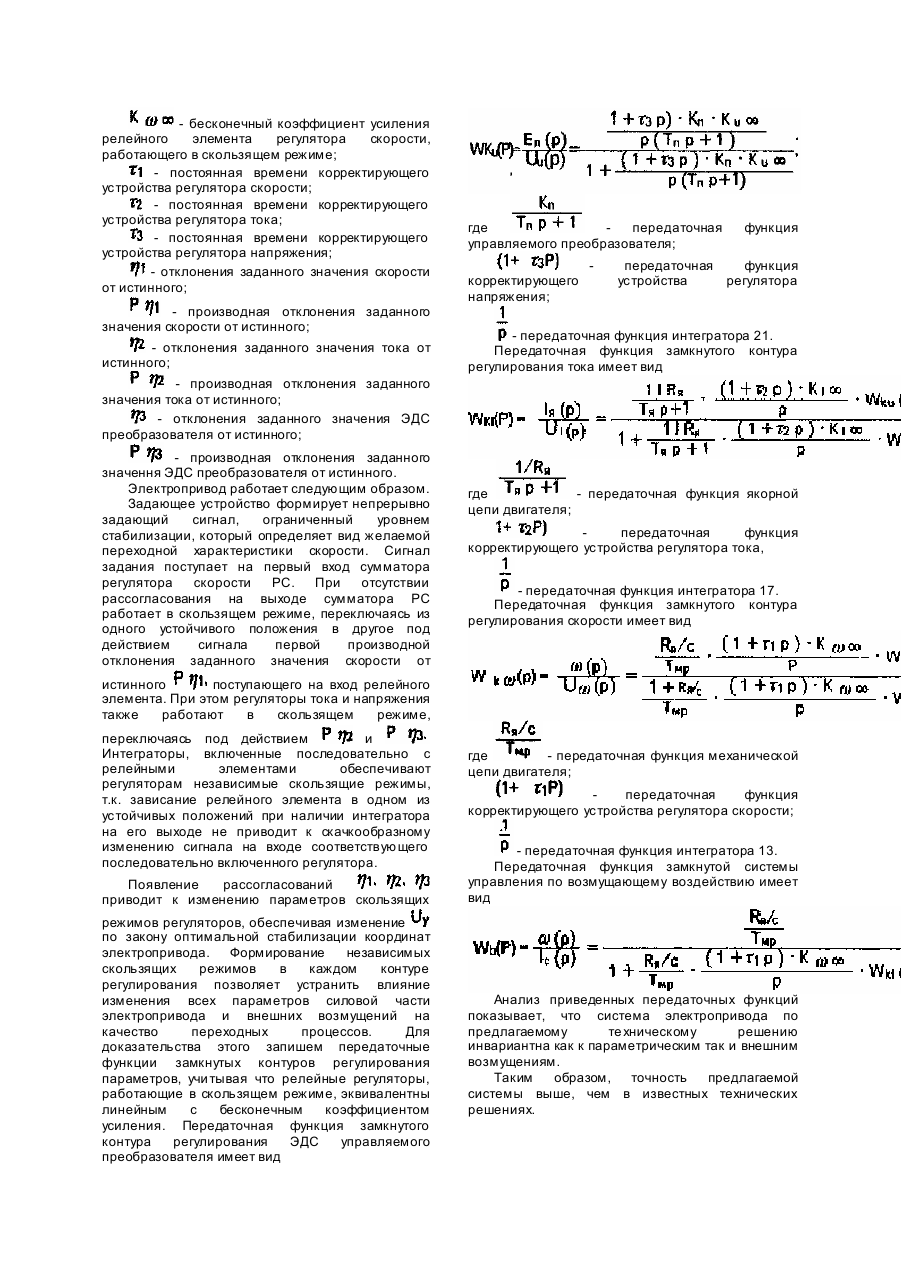
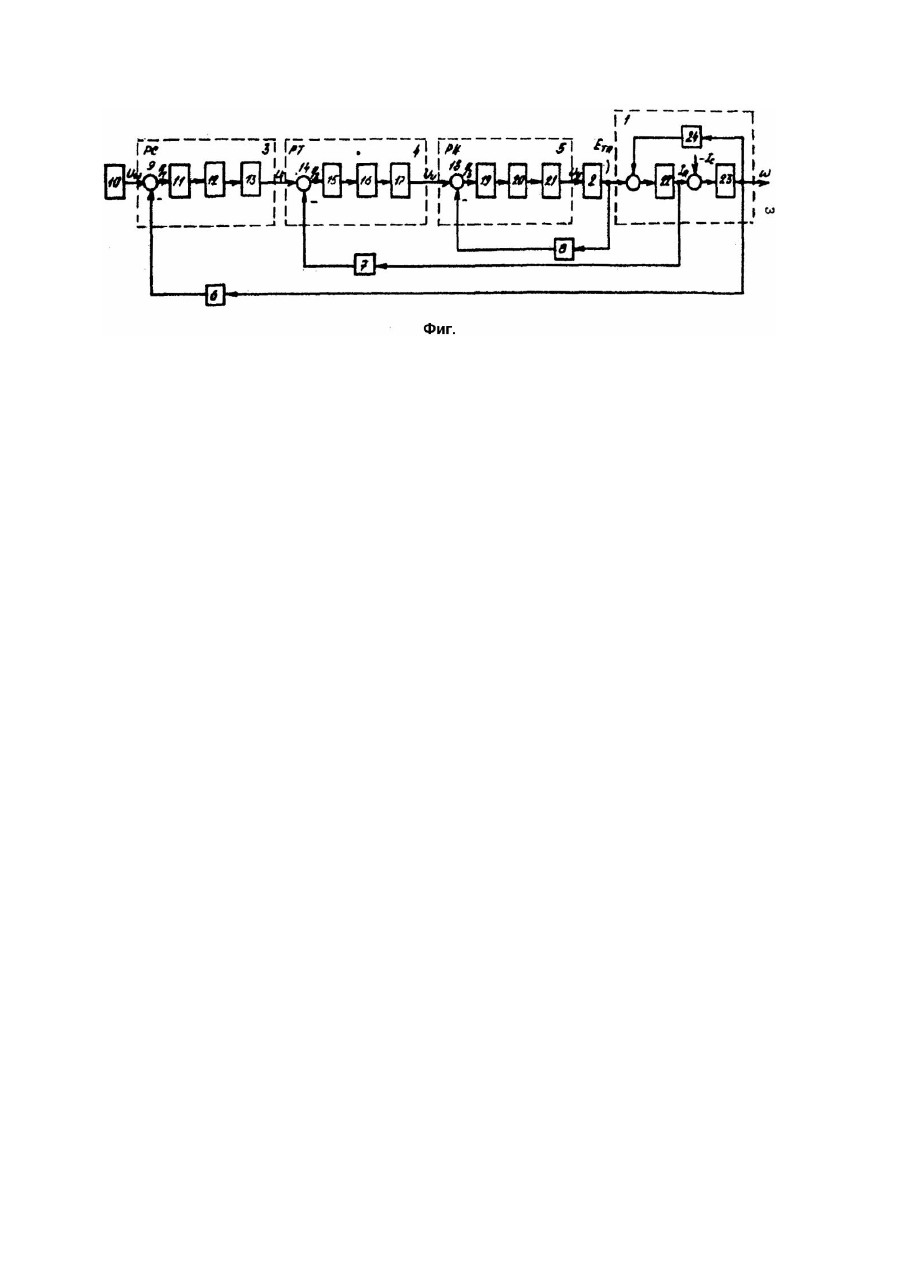
Изобретение относится к электротехнике, а именно к автоматизированным электроприводам постоянного тока с повышенными требованиями к быстродействию систем и точности управления. Известен электропривод постоянного тока [1], содержащий электродвигатель, подключенный к управляемому преобразователю, в цепь управления которого включены последовательно соединенные регулятор скорости и регулятор тока, входы которых соединены соответственно с датчиками скорости и тока. При этом каждый регулятор образован последовательно включенными устройством задания желаемой переходной характеристики(выполненным в виде апериодического звена, блоком сравнения и безинерционным звеном, при этом вход устройства задания желаемой переходной характеристики является входом регулятора для подключения задающего устройства или вы хода предыдущего регулятора, вычитающий вход блока сравнения -входом регулятора для подключения датчиков, а выход безинерционного звена выходом регулятора. В известном устройстве точность поддержания регулируемых величин ограничена невозможностью физической реализуемости узлов с бесконечными коэффициентами передачи, а устойчивость системы зависит от соотношения величин постоянных времени электродвигателя и устройств задания желаемой переходной характеристики. В основу изобретения поставлена задача усовершенствования электропривода постоянного тока так, чтобы при параметрической нестационарности объекта и действии стохастических возмущений обеспечить высокую точность воспроизведения заданных траекторий движения. Поставленная задача решается включением между регулятором тока и входом управляемого преобразователя регулятора напряжения, вход которого соединен с датчиком напряжения, причем каждый регулятор образован последовательно включенными сумматором, корректирующим устройством, выполненным в виде пропорционально-дифференцирующего звена, релейным элементом и сумматором, при этом первые входы сумматоров являются входами для подключения задающего устройства или вы хода предыдущего регулятора, вторые входы сумматоров входами регуляторов для подключения датчиков, а выходы интеграторов выходами регуляторов. На чертеже (фиг.) приведена структурная схема электропривода. Электропривод содержит электродвигатель 1, подключенный к управляемому преобразователю 2, в цепь управления которого включены последовательно соединенные регулятор 3 скорости, регулятор 4 тока и регулятор 5 напряжения, входы которых соединены соответственно с датчиками скорости 6, тока 7 и напряжения 8. При этом регулятор скорости 3 образован последовательно соединенными сумматором 9, на первый вход которого поступает сигнал, сформированный задающим устройством 10, а на второй вход - сигнал с датчика скорости 6, корректирующим устройством 11, выполненным в виде пропорционально-дифференцирующего звена, релейным элементом 12 и интегратором 13. Выход регулятора 3 скорости соединен со входом регулятора 4 тока, который образован последовательно включенными сумматором 14, первый вход которого соединен с выходом интегратора 13, а второй - с выходом датчика тока 7, корректирующим устройством 15, выполненным в виде пропорционально-дифференцирующего звена, релейным элементом 16 и интегратором 17, Выход регулятора 4 тока соединен со входом регулятора 5 напряжения. Регулятор 5 напряжения образован последовательно соединенными сумматором 18, первый вход которого соединен с выходом интегратора 17, а второй - с выходом датчика напряжения 8, корректирующим устройством 19, выполненным в виде пропорционально-дифференцирующего звена, релейным элементом 20 и интегратором 21. Выход интегратора 21 подключен ко входу управляемого преобразователя 2. Первые входы сумматоров 9, 14 и 18 являются входами регуляторов скорости 3, тока 4 и напряжения 5 для подключения задающего устройства 10 или выхода предыдущего регулятора, вторые входы 9, 14 и 18 сумматоров входами регуляторов для подключения датчиков 3, 4 и 5, а выходы интеграторов 13, 17 и 21 - выходами регуляторов. Электродвигатель 1 содержит якорную цепь 22, механическую часть 23 и звено 24 внутренней обратной связи по ЭДС. На структурной схеме приняты следующие обозначения: - оператор Лапласса; - коэффициент усиления управляемого преобразователя; - ЭДС управляемого преобразователя; - постоянная времени управляемого преобразователя; - ток якорной цепи двигателя; - ток нагрузки; - скорость электродвигателя, - суммарное сопротивление якорной цепи электродвигателя; конструктивная постоянная электродвигателя; электромеханическая постоянная времени электродвигателя; - суммарный приведенный момент инерции электропривода; - электромагнитная постоянная времени электродвигателя; - индуктивность якорной цепи; сигнал задания переходной характеристики скорости; - вы ходной сигнал регулятора скорости; - вы ходной сигнал регулятора тока; - вы ходной сигнал регулятора напряжения; - бесконечный коэффициент усиления релейного элемента регулятора напряжения, работающего в скользящем режиме; - бесконечный коэффициент усиления релейного элемента регулятора тока, работающего в скользящем режиме; - бесконечный коэффициент усиления релейного элемента регулятора скорости, работающего в скользящем режиме; - постоянная времени корректирующего устройства регулятора скорости; - постоянная времени корректирующего устройства регулятора тока; - постоянная времени корректирующего устройства регулятора напряжения; - отклонения заданного значения скорости от истинного; - производная отклонения заданного значения скорости от истинного; - отклонения заданного значения тока от истинного; где передаточная управляемого преобразователя; корректирующего напряжения; функция передаточная функция устройства регулятора - передаточная функция интегратора 21. Передаточная функция замкнутого контура регулирования тока имеет вид - производная отклонения заданного значения тока от истинного; - отклонения заданного значения ЭДС преобразователя от истинного; - производная отклонения заданного значення ЭДС преобразователя от истинного. Электропривод работает следующим образом. Задающее устройство формирует непрерывно задающий сигнал, ограниченный уровнем стабилизации, который определяет вид желаемой переходной характеристики скорости. Сигнал задания поступает на первый вход сумматора регулятора скорости PC. При отсутствии рассогласования на выходе сумматора PC работает в скользящем режиме, переключаясь из одного устойчивого положения в другое под действием сигнала первой производной отклонения заданного значения скорости от где - передаточная функция якорной цепи двигателя; передаточная функция корректирующего устройства регулятора тока, - передаточная функция интегратора 17. Передаточная функция замкнутого контура регулирования скорости имеет вид истинного поступающего на вход релейного элемента. При этом регуляторы тока и напряжения также работают в скользящем режиме, переключаясь под действием и Интеграторы, включенные последовательно с релейными элементами обеспечивают регуляторам независимые скользящие режимы, т.к. зависание релейного элемента в одном из устойчивых положений при наличии интегратора на его выходе не приводит к скачкообразному изменению сигнала на входе соответствующего последовательно включенного регулятора. Появление рассогласований приводит к изменению параметров скользящих режимов регуляторов, обеспечивая изменение по закону оптимальной стабилизации координат электропривода. Формирование независимых скользящих режимов в каждом контуре регулирования позволяет устранить влияние изменения всех параметров силовой части электропривода и внешних возмущений на качество переходных процессов. Для доказательства этого запишем передаточные функции замкнутых контуров регулирования параметров, учи тывая что релейные регуляторы, работающие в скользящем режиме, эквивалентны линейным с бесконечным коэффициентом усиления. Передаточная функция замкнутого контура регулирования ЭДС управляемого преобразователя имеет вид где - передаточная функция механической цепи двигателя; передаточная функция корректирующего устройства регулятора скорости; - передаточная функция интегратора 13. Передаточная функция замкнутой системы управления по возмущающему воздействию имеет вид Анализ приведенных передаточных функций показывает, что система электропривода по предлагаемому те хническому решению инвариантна как к параметрическим так и внешним возмущениям. Таким образом, точность предлагаемой системы выше, чем в известных технических решениях.
ДивитисяДодаткова інформація
Назва патенту англійськоюAc electric drive
Автори англійськоюSadovoi Oleksandr Valentynovych, Sokhina Yuliia Vitaliivna
Назва патенту російськоюЭлектропривод постоянного тока
Автори російськоюСадовой Александр Валентинович, Сохина Юлия Витальевна
МПК / Мітки
МПК: H02P 7/06
Мітки: струму, електропривод, постійного
Код посилання
<a href="https://ua.patents.su/3-15301-elektroprivod-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Електропривод постійного струму</a>
Реверсивний електропривод постійного струму
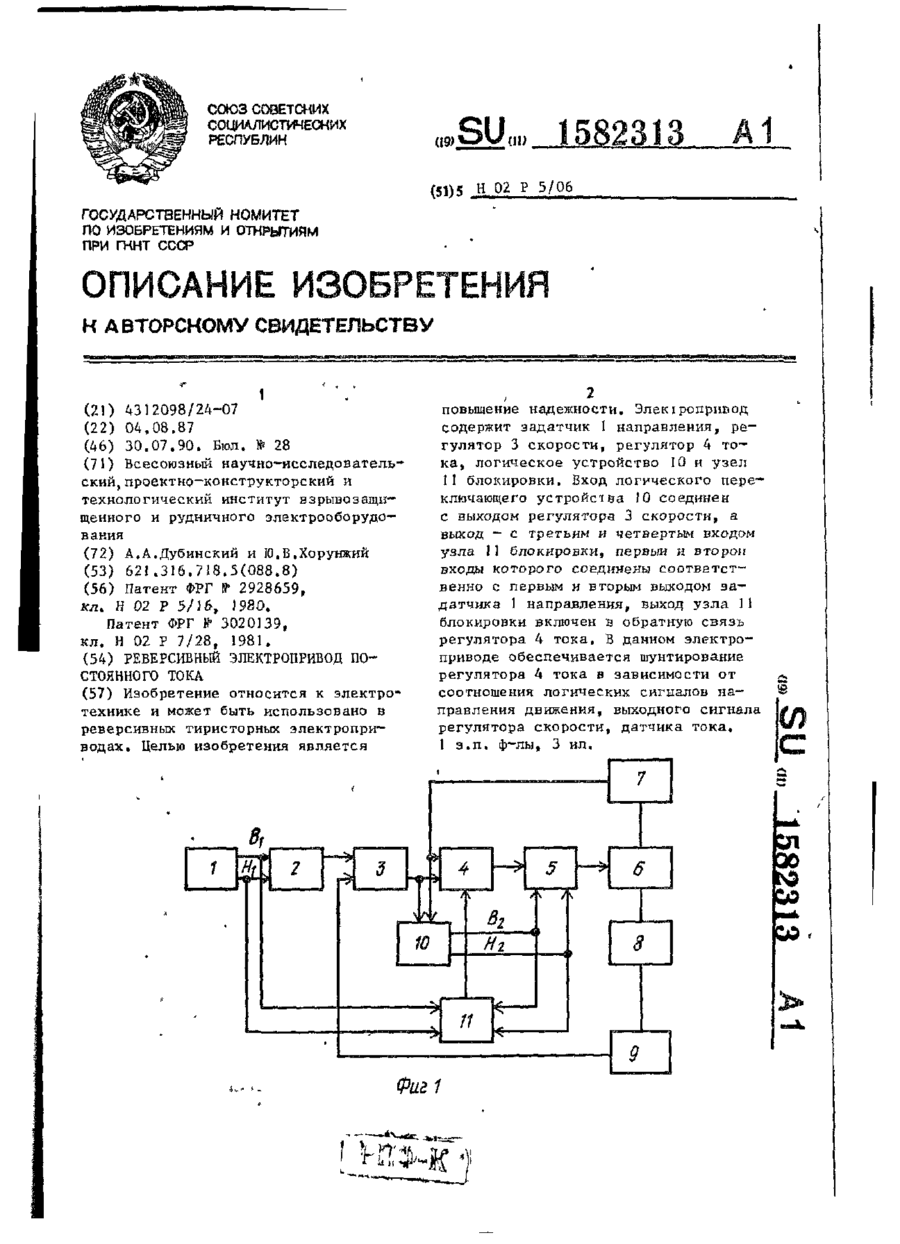
Номер патенту: 11857
Опубліковано: 25.12.1996
Автори: Дубинський Андрій Олександрович, Хорунжий Юрій Валентинович
МПК: H02P 7/06
Мітки: реверсивний, струму, постійного, електропривод
Формула / Реферат:
1.Реверсивный электропривод постоянного тока, содержащий задатчик направления, первый и второй выходы которого соединены с первым и вторым входами задатчика скорости, выходом подключенного к последовательно соединенным регуляторам скорости и тока, системе формирования импульсов, тиристорному преобразователю, выход которого подключен к якорной обмотке двигателя, реверсивный датчик скорости, датчик тока, выходы которых подключены...
Електропривод постійного струму
Номер патенту: 11501
Опубліковано: 25.12.1996
Автори: Воронецький Ігор Якович, Бондарчук Петро Максимович, Костенко Людмила Степанівна, Охмакевич Василь Федорович
МПК: H02P 25/02
Мітки: струму, постійного, електропривод
Формула / Реферат:
Электропривод постоянного тока, содержащий электродвигатель, якорь которого подключен к вентильному преобразователю, и двухконтурную систему регулирования с пропорционально-интегральными регуляторами тока и скорости, входы которых соединены соответственно с датчиками тока и скорости, отличающийся тем, что, с целью повышения точности регулирования путем исключения статической ошибки, в него введен усилитель с регулируемым коэффициентом...
Електропривод постійного струму

Номер патенту: 4618
Опубліковано: 28.12.1994
Автор: Сороченко Микола Іванович
МПК: H02P 7/06
Мітки: струму, електропривод, постійного
Формула / Реферат:
Электропривод постоянного тока, содержащий электродвигатель, якорная обмотка которого подключена к тиристорному преобразователю с блоком управления, входы обратных связей и задания блока управления соединены с датчиками тока, скорости, положения и задатчиком режима работы, программируемый таймер, счетный вход которого подключен к генератору импульсов, а информационные входы и выходы, а также выход переполнения этого таймера подключены к...
Електропривод постійного струму
Номер патенту: 6724
Опубліковано: 29.12.1994
Автор: Кутрань Ігор Сергійович
МПК: H02P 7/06
Мітки: постійного, струму, електропривод
Формула / Реферат:
(57) Электропривод постоянного тока, содержащий электродвигатель, первым выводом подключенный к первому выводу источника питания, первый управляемый силовой ключ, первым выводом подключенный к второму выводу источника питания, дроссель, начало и конец первичной обмотки которого соединен с вторыми выводами соответственно первого управляемого силового ключа и электродвигателя, диод, конденсатор, подключенный параллельно электродвигателю и блок...
Електропривод змінного струму

Номер патенту: 3189
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: змінного, електропривод, струму
Формула / Реферат:
Электропривод переменного тока, содержащий электродвигатель, задатчик фазных токов, два однофазных преобразователя тока, подключенные входами к выходам задатчика фазных токов, а первыми выходными выводами - к первому и второму входным выводам двигателя соответственно, отличающийся тем, что вторые выходные выводы преобразователя тока объединены и подключены к третьему входному выводу двигателя.
Попередній патент: Пристрій автоматичного управління процесом електролізу води для одержання водню та кисню
Наступний патент: Спосіб контролю складу феромагнітної пульпи
Випадковий патент: Пристрій для формоутворення і термофіксації тонкостінних оболонок