Спосіб підвищення стійкості транспортного засобу
Формула / Реферат
Спосіб підвищення стійкості транспортного засобу, що полягає у використанні гіроскопічних властивостей обертових у жорстко закріплених на ньому вузлах підвіски маховика і ротора двигуна, який відрізняється тим, що вектори кутових швидкостей обертання маховика і ротора двигуна спрямовані вправо перпендикулярно до площини симетрії транспортного засобу, а величини цих кутових швидкостей у процесі руху транспортного засобу підтримуються в межах, обумовлених співвідношенням
 ,
,
де ![]() ,
, ![]() ,
, ![]() – висота центра мас над дорогою, повна маса і швидкість поступального руху транспортного засобу;
– висота центра мас над дорогою, повна маса і швидкість поступального руху транспортного засобу; ![]() – число обертових коліс;
– число обертових коліс; ![]()
![]() - момент інерції і радіус колеса;
- момент інерції і радіус колеса; ![]() - прискорення сили ваги;
- прискорення сили ваги; ![]() - коефіцієнт, що враховує число точок опори транспортного засобу:
- коефіцієнт, що враховує число точок опори транспортного засобу: ![]() - для чотириколісного (
- для чотириколісного (![]() - ширина колії),
- ширина колії), ![]() - для триколісного в залежності від його центрування і бази,
- для триколісного в залежності від його центрування і бази, ![]() - для двоколісного (
- для двоколісного (![]() - максимальний кут його нахилу від вертикалі, що виключає ковзання коліс);
- максимальний кут його нахилу від вертикалі, що виключає ковзання коліс); ![]() - радіус повороту транспортного засобу;
- радіус повороту транспортного засобу; ![]() ,
, ![]() - момент інерції і кутова швидкість обертання маховика;
- момент інерції і кутова швидкість обертання маховика; ![]() ,
, ![]() - момент інерції і кутова швидкість обертання ротора двигуна.
- момент інерції і кутова швидкість обертання ротора двигуна.
Текст
Спосіб підвищення стійкості транспортного засобу, що полягає у використанні гіроскопічних властивостей обертових у жорстко закріплених на ньому вузлах підвіски маховика і ротора двигуна, який відрізняється тим, що вектори кутових швидкостей обертання маховика і ротора двигуна спрямовані вправо перпендикулярно до площини симетрії транспортного засобу, а величини цих кутових швидкостей у процесі руху транспортного засобу підтримуються в межах, обумовлених співвідношенням nIK mgkR rK IM M IД Д hm nIK mgkR rK , rK - момент інерції і радіус колеса; g - прискорення сили ваги; k - коефіцієнт, що враховує число точок опори транспортного засобу: k a / 2 для чотириколісного ( a - ширина колії), - для триколісного в залежності від 0 k a/ 2 його центрування і бази, k h sin - для двоколісного ( - максимальний кут його нахилу від вертикалі, що виключає ковзання коліс); R - радіус повороту транспортного засобу; IM , M - момент інерції і кутова швидкість обертання маховика; IД , Д - момент інерції і кутова швидкість обертання ротора двигуна. (11) UA засобів при їзді по поганій звивистій дорозі з великою швидкістю, що вимагає уживання відповідних заходів обережності, а також оптимізації систем керування. В останні десятиліття обговорюється можливість використання і розробляються конструкції нагромаджувачів енергії на основі маховиків. Конструктивно на транспортних засобах їх встановлюють у різних положеннях, у тому числі - що зустрічається найбільше часто - і в горизонтальній площині [1]. Однієї з функцій таких нагромаджувачів енергії може бути і підвищення динамічної стійкості транспортних засобів. Однак навіть найпростіший аналіз обертового в горизонтальній площині маховика показує, що гіроскопічний момент, котрий з'являється при перевертанні транспортного засобу на повороті, спрямований на підйом чи притискання до дороги (у залежності від напрямку обертання маховика) його передньої чи задньої частини, але ніяк не на збереження його горизонтального положення. Тим більше, що обертовий у горизонтальній площині маховик не перешкоджає обертанню (19) Корисна модель відноситься до наземних транспортних засобів з комбінованими силовими установками, що складаються з первинних двигунів (електродвигунів і двигунів внутрішнього згоряння чи тільки двигунів внутрішнього згоряння) і засобів акумулювання енергії у вигляді маховиків, зокрема, до розташування цих елементів і вибору режимів їхньої роботи з метою підвищення динамічної стійкості транспортних засобів на поворотах і при заносах. Як відомо, на повороті дія відцентрової сили приводить до появи перевертаючого моменту, що прагне перевернути транспортний засіб. З метою зниження ризику перевертання транспортного засобу конструктори прагнуть опустити його цент ваги якнайнижче. Однак тут є природні обмеження, перебороти які вищевказаним способом неможливо принципово. На повороті також можливий занос транспортного засобу, якщо дія відцентрових сил перевищує силу зчеплення його коліс з покриттям дороги. Усе перераховане вище приводить до визначеного ризику для водіїв і пасажирів транспортних 16074 (13) U hm де h , m , – висота центра мас над дорогою, повна маса і швидкість поступального руху транспортного засобу; n – число обертових коліс; IK 3 транспортного засобу в тій же площині при заносі. Таким чином, питання використання маховика для підвищення динамічної стійкості транспортного засобу пророблялося явно недостатньо. Тим часом, використання гіроскопічних властивостей маховика при визначеній його орієнтації і заздалегідь заданій швидкості обертання (тобто заданій величині кінетичного моменту) дозволяє цілком компенсувати дію перевертаючого моменту на повороті і зменшити кутову швидкість обертання транспортного засобу при заносі. Дійсно, величина гіроскопічного моменту LМ обертового в жорстко закріплених на транспортному засобі вузлах підвіски маховика, вісь якого горизонтальна, визначається формулою [2] LM IM M . (1) де IM , M - момент інерції і кутова швидкість обертання маховика; - кутова швидкість повороту транспортного засобу. З іншого боку, величина перевертаючого моменту Μ від дії на транспортний засіб відцентрової сили дорівнює добутку цієї сили на плече її дії [2], тобто визначається рівністю (2) M hm , де h, m, ν - висота центра мас над дорогою, повна маса і швидкість поступального руху транспортного засобу. Якщо маховик розмістити так, щоб його гіроскопічний момент і перевертаючий момент були спрямовані назустріч і чисельно дорівнювали один одному, то транспортний засіб перевертатися не буде. Виявляється також, що при порівнянні правих частин виражень (1) і (2) кутова швидкість повороту транспортного засобу Ω, що залежить від швидкості його руху і радіуса повороту, скорочується, що в найпростішому випадку робить систему динамічної стабілізації транспортного засобу незалежної від цього радіуса. При цьому потрібна швидкість обертання маховика буде дорівнює hm M IM При лівому (правому) повороті вектор перевертаючого моменту спрямований уперед (назад) стосовно напрямку первісного руху транспортного засобу. При лівому (правому) повороті вектор збурюючого моменту, діючого на маховик, спрямований вгору (униз). Відповідно до законів прецесії [2] вектор кінетичного моменту маховика прагне сполучитися з вектором збурюючого моменту. Якщо вектор кінетичного моменту маховика направити вправо, то при лівому (правому) повороті він буде прагнути повернутися вгору (униз), а вектор гіроскопічного моменту при цьому буде спрямований назад (уперед), тобто буде протидіяти перевертаючому моменту. З іншого боку, якщо при такій схемі розташування маховика транспортний засіб нахиляється на повороті під дією відцентрової сили, то виникаючий при цьому гіроскопічний момент маховика буде сприяти повороту, що сприятливо для водіння цього засобу. А якщо транспортний засіб починає обертатися в горизонтальній площині при заносі, то вини 16074 4 каючий гіроскопічний момент маховика буде врівноважуватися моментом від сили ваги транспортного засобу (якщо в нього більш ніж два колеса, тобто є площа опори) і перевертаючим моментом за рахунок дії відцентрової сили, що у свою чергу буде обмежувати кутову швидкість обертання цього засобу. Даний спосіб цілком реалізуємий на практиці. Покажемо це на прикладі компенсації перевертаючого моменту, що виникає при повороті транспортного засобу. Нехай висота його центра мас над дорогою дорівнює 1м, повна маса транспортного засобу - 1000кг, швидкість руху – 100км/год (27,8м/с), а момент інерції маховика - 20кг м2 (обід масою 80кг при діаметрі 0,5м). Тоді кутова швидкість його обертання відповідно до формули (3) повинна дорівнювати 1390 1/с (13274об/хв), що цілком досяжна на практиці. Очевидно, що точно витримати рівність (3) при інтенсивній зміні швидкості руху транспортного засобу дуже проблематично. Але і цілком компенсувати перевертаючий момент немає потреби. Досить компенсувати тільки ту частину, що порушує бічну стійкість засобу на повороті. З іншого боку, якщо маховик розкручений поверх норми, то його енергію можна використовувати для руху транспортного засобу замість енергії двигуна чи разом з енергією двигуна (наприклад, при їзді вгору). Очевидно також, що маховик не може бути розкручений до таких кутових швидкостей, при яких за рахунок величезного гіроскопічного моменту під час повороту транспортний засіб буде перевертатися убік повороту. Таким чином, існує деякий діапазон можливих кутових швидкостей обертання маховика, при яких транспортний засіб буде залишатися стійким на поворотах. Для більш точного рішення цієї задачі необхідно врахувати запас стійкості транспортного засобу за рахунок його сили ваги і ширини колії, а також за рахунок інших обертових елементів, гіроскопічні моменти яких можуть впливати на стійкість транспортного засобу на повороті, а саме: ротора двигуна і коліс. Запас бічної стійкості транспортного засобу визначається його масою т і шириною колії а (якщо в нього більше двох коліс) чи його нахилом (якщо в нього два колеса). Для того, щоб перевернути засіб, потрібно прикласти момент, не менш чим момент запасу стійкості MУ mgk , (4) де g – прискорення сили ваги; k – коефіцієнт, що враховує число точок опори транспортного засобу: k=a/2 для чотириколісного, 0
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of increasing the durability of vehicle
Назва патенту російськоюСпособ повышения стойкости транспортного средства
МПК / Мітки
МПК: B60K 6/00
Мітки: транспортного, засобу, спосіб, стійкості, підвищення
Код посилання
<a href="https://ua.patents.su/3-16074-sposib-pidvishhennya-stijjkosti-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення стійкості транспортного засобу</a>
Привід транспортного засобу
Номер патенту: 73620
Опубліковано: 15.08.2005
Автори: Пабат Анатолій Іванович, Пабат Анастасія Анатоліївна
МПК: H02K 7/00
Мітки: засобу, транспортного, привід
Формула / Реферат:
Привід транспортного засобу, що містить електричний привідний двигун, з'єднаний з механізмом руху за допомогою двох редукторів, які мають швидкохідні, тихохідні вали і маховик, який відрізняється тим, що електричний привідний двигун містить ротор та обертовий статор-індуктор, обладнаний маховиком швидкохідний вал одного редуктора з'єднаний з ротором привідного двигуна, швидкохідний вал іншого редуктора з'єднаний з обертовим...
Спосіб визначення орієнтації і місцеположення транспортного засобу
Номер патенту: 64162
Опубліковано: 16.02.2004
Автор: Гайдук Павло Миколайович
МПК: G01C 21/00, G01C 23/00
Мітки: транспортного, визначення, спосіб, місцеположення, засобу, орієнтації
Формула / Реферат:
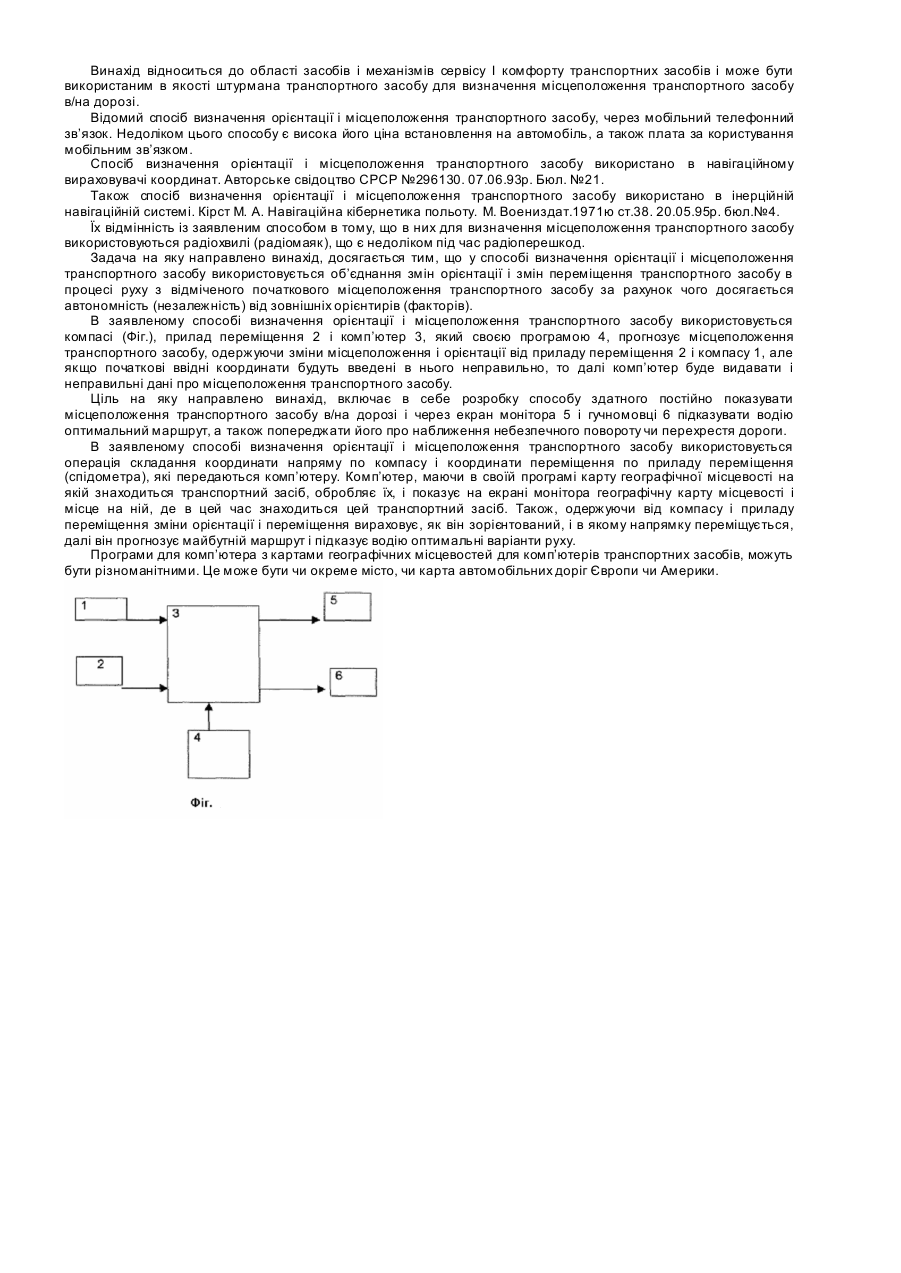
Спосіб визначення орієнтації і місцеположення транспортного засобу, що полягає в визначенні місцеположення транспортного засобу на географічній карті, який відрізняється тим, що відмічають початкове місцеположення транспортного засобу на географічній карті, введеній у комп’ютер, та визначають його орієнтацію відносно сторін світу, а в процесі руху транспортного засобу зміни його місцеположення і орієнтації передають в комп’ютер, і одержують...
Спосіб визначення початкової швидкості транспортного засобу за величиною залишкових деформацій, одержаних транспортним засобом при наїзді на нерухому перепону
Номер патенту: 69465
Опубліковано: 15.09.2004
Автори: Торлін Вадім Миколайович, Бабкін Олексій Вікторович, Ксенофонтова Вікторія Анатоліївна
МПК: B62D 47/00
Мітки: швидкості, транспортним, нерухому, спосіб, деформацій, одержаних, наїзді, засобу, визначення, початкової, транспортного, залишкових, засобом, величиною, перепону
Формула / Реферат:
Спосіб визначення початкової швидкості транспортного засобу за величиною залишкових деформацій, одержаних транспортним засобом при наїзді на нерухому перепону, що містить вимір довжини деформованого кyзoвa, який відрізняється тим, що вимірюються також величини залишкових деформацій решти деформованих і зруйнованих деталей і вузлів, з частковим розбиранням зруйнованого транспортного засобу, після чого розраховується величина енергії,...
Спосіб пересування транспортного засобу та двигун для його здійснення
Номер патенту: 51692
Опубліковано: 16.12.2002
Автор: Дешко Ігор Віталійович
МПК: F03G 3/00
Мітки: транспортного, спосіб, пересування, здійснення, засобу, двигун
Формула / Реферат:
1. Спосіб пересування транспортного засобу, що полягає у перетворюванні впливу інерційних мас в односпрямоване пересування транспортного засобу шляхом взаємодії інерційних мас, які рухаються, з інерційними елементами, що встановлені на корпусі, який відрізняється тим, що інерційні маси переміщують примусово в системі відліку обертових інерційних елементів.2. Двигун для пересування транспортного засобу, який містить корпус, зв'язаний з...
Спосіб антиблокувального керування гальмуванням з підвищеною курсовою стійкістю транспортного засобу
Номер патенту: 11673
Опубліковано: 16.01.2006
Автори: Тимофєєв Віталій Сергійович, Богатиренко Костянтин Іванович, Лавріненко Олександр Сергійович
МПК: B60T 8/88
Мітки: гальмуванням, керування, транспортного, спосіб, курсовою, підвищеною, стійкістю, засобу, антиблокувального
Формула / Реферат:
Спосіб антиблокувального керування гальмуванням транспортного засобу, при якому екстремальне автоматичне керування гальмуванням транспортного засобу здійснюють шляхом виміру тангенціальної складової сили тертя між гальмовим диском і гальмовою колодкою при розгальмовуванні колеса в точці фактичного максимуму сили зчеплення коліс з дорожнім покриттям, який відрізняється тим, що визначають умови зчеплення кожного колеса (однієї осі) з дорожнім...
Попередній патент: Пристрій для сушіння сипучих матеріалів
Наступний патент: Потокова лінія для підготування та подавання сипких матеріалів до плавильного агрегату та сталерозливного ковша
Випадковий патент: Фосфонатні аналоги сполук інгібіторів віл