Привід транспортного засобу
Номер патенту: 73620
Опубліковано: 15.08.2005
Автори: Пабат Анатолій Іванович, Пабат Анастасія Анатоліївна
Формула / Реферат
Привід транспортного засобу, що містить електричний привідний двигун, з'єднаний з механізмом руху за допомогою двох редукторів, які мають швидкохідні, тихохідні вали і маховик, який відрізняється тим, що електричний привідний двигун містить ротор та обертовий статор-індуктор, обладнаний маховиком швидкохідний вал одного редуктора з'єднаний з ротором привідного двигуна, швидкохідний вал іншого редуктора з'єднаний з обертовим статором-індуктором привідного двигуна, а тихохідні вали редукторів з'єднані з механізмом руху транспортного засобу, при цьому редуктори виконані взаємно інвертувальними по напрямку обертального моменту.
Текст
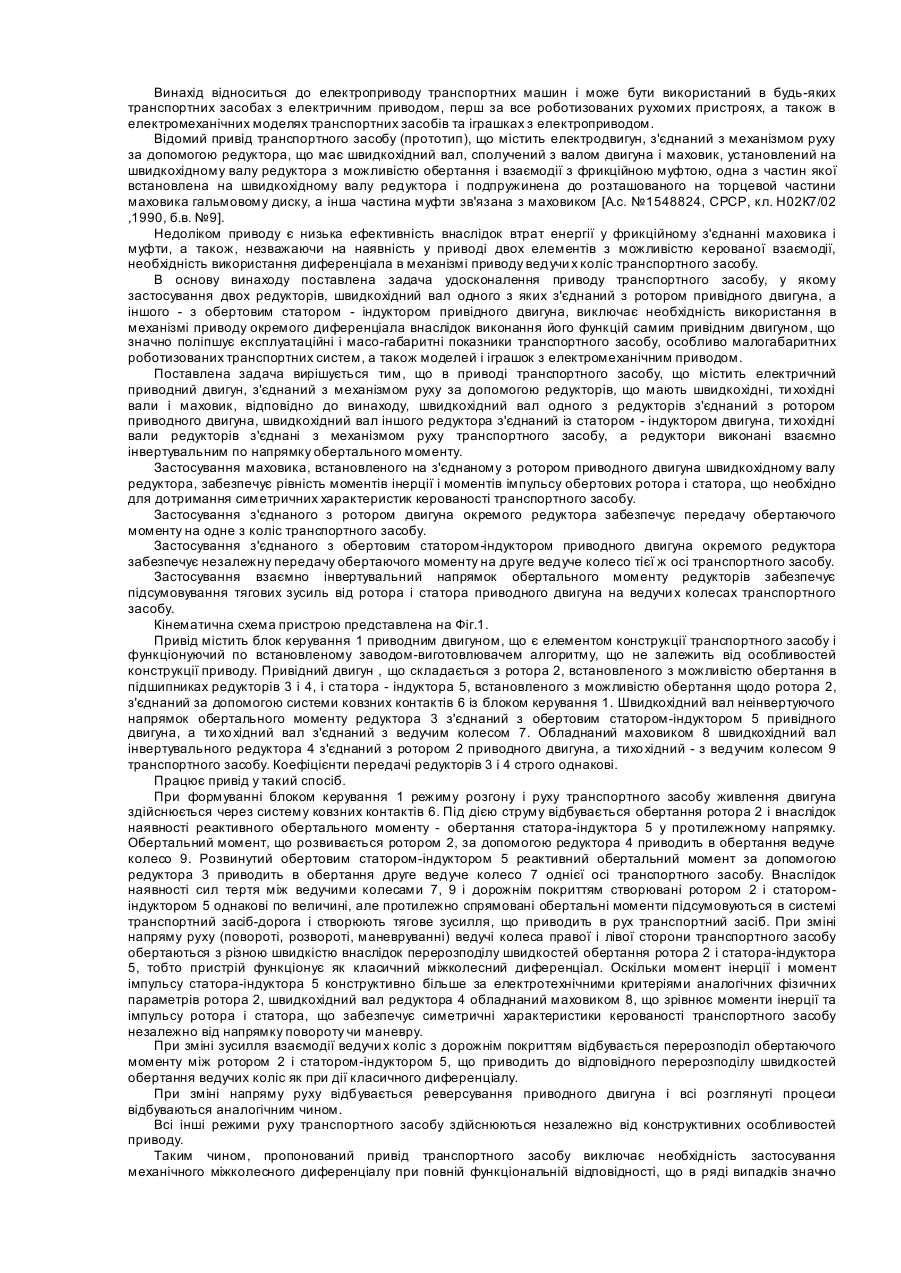
Винахід відноситься до електроприводу транспортних машин і може бути використаний в будь-яких транспортних засобах з електричним приводом, перш за все роботизованих рухомих пристроях, а також в електромеханічних моделях транспортних засобів та іграшках з електроприводом. Відомий привід транспортного засобу (прототип), що містить електродвигун, з'єднаний з механізмом руху за допомогою редуктора, що має швидкохідний вал, сполучений з валом двигуна і маховик, установлений на швидкохідному валу редуктора з можливістю обертання і взаємодії з фрикційною муфтою, одна з частин якої встановлена на швидкохідному валу редуктора і подпружинена до розташованого на торцевой частини маховика гальмовому диску, а інша частина муфти зв'язана з маховиком [А.с. №1548824, СРСР, кл. Η02К7/02 ,1990, б.в. №9]. Недоліком приводу є низька ефективність внаслідок втрат енергії у фрикційному з'єднанні маховика і муфти, а також, незважаючи на наявність у приводі двох елементів з можливістю керованої взаємодії, необхідність використання диференціала в механізмі приводу ведучи х коліс транспортного засобу. В основу винаходу поставлена задача удосконалення приводу транспортного засобу, у якому застосування двох редукторів, швидкохідний вал одного з яких з'єднаний з ротором привідного двигуна, а іншого - з обертовим статором - індуктором привідного двигуна, виключає необхідність використання в механізмі приводу окремого диференціала внаслідок виконання його функцій самим привідним двигуном, що значно поліпшує експлуатаційні і масо-габаритні показники транспортного засобу, особливо малогабаритних роботизованих транспортних систем, а також моделей і іграшок з електромеханічним приводом. Поставлена задача вирішується тим, що в приводі транспортного засобу, що містить електричний приводний двигун, з'єднаний з механізмом руху за допомогою редукторів, що мають швидкохідні, ти хохідні вали і маховик, відповідно до винаходу, швидкохідний вал одного з редукторів з'єднаний з ротором приводного двигуна, швидкохідний вал іншого редуктора з'єднаний із статором - індуктором двигуна, ти хохідні вали редукторів з'єднані з механізмом руху транспортного засобу, а редуктори виконані взаємно інвертувальним по напрямку обертального моменту. Застосування маховика, встановленого на з'єднаному з ротором приводного двигуна швидкохідному валу редуктора, забезпечує рівність моментів інерції і моментів імпульсу обертових ротора і статора, що необхідно для дотримання симетричних характеристик керованості транспортного засобу. Застосування з'єднаного з ротором двигуна окремого редуктора забезпечує передачу обертаючого моменту на одне з коліс транспортного засобу. Застосування з'єднаного з обертовим статором-індуктором приводного двигуна окремого редуктора забезпечує незалежну передачу обертаючого моменту на друге ведуче колесо тієї ж осі транспортного засобу. Застосування взаємно інвертувальний напрямок обертального моменту редукторів забезпечує підсумовування тягових зусиль від ротора і статора приводного двигуна на ведучи х колесах транспортного засобу. Кінематична схема пристрою представлена на Фіг.1. Привід містить блок керування 1 приводним двигуном, що є елементом конструкції транспортного засобу і функціонуючий по встановленому заводом-виготовлювачем алгоритму, що не залежить від особливостей конструкції приводу. Привідний двигун , що складається з ротора 2, встановленого з можливістю обертання в підшипниках редукторів 3 і 4, і ста тора - індуктора 5, встановленого з можливістю обертання щодо ротора 2, з'єднаний за допомогою системи ковзних контактів 6 із блоком керування 1. Швидкохідний вал неінвертуючого напрямок обертального моменту редуктора 3 з'єднаний з обертовим статором-індуктором 5 привідного двигуна, а ти хо хідний вал з'єднаний з ведучим колесом 7. Обладнаний маховиком 8 швидкохідний вал інвертувального редуктора 4 з'єднаний з ротором 2 приводного двигуна, а тихо хідний - з ведучим колесом 9 транспортного засобу. Коефіцієнти передачі редукторів 3 і 4 строго однакові. Працює привід у такий спосіб. При формуванні блоком керування 1 режиму розгону і руху транспортного засобу живлення двигуна здійснюється через систему ковзних контактів 6. Під дією струму відбувається обертання ротора 2 і внаслідок наявності реактивного обертального моменту - обертання статора-індуктора 5 у протилежному напрямку. Обертальний момент, що розвивається ротором 2, за допомогою редуктора 4 приводить в обертання ведуче колесо 9. Розвинутий обертовим статором-індуктором 5 реактивний обертальний момент за допомогою редуктора 3 приводить в обертання друге ведуче колесо 7 однієї осі транспортного засобу. Внаслідок наявності сил тертя між ведучими колесами 7, 9 і дорожнім покриттям створювані ротором 2 і статороміндуктором 5 однакові по величині, але протилежно спрямовані обертальні моменти підсумовуються в системі транспортний засіб-дорога і створюють тягове зусилля, що приводить в рух транспортний засіб. При зміні напряму руху (повороті, розвороті, маневруванні) ведучі колеса правої і лівої сторони транспортного засобу обертаються з різною швидкістю внаслідок перерозподілу швидкостей обертання ротора 2 і статора-індуктора 5, тобто пристрій функціонує як класичний міжколесний диференціал. Оскільки момент інерції і момент імпульсу статора-індуктора 5 конструктивно більше за електротехнічними критеріями аналогічних фізичних параметрів ротора 2, швидкохідний вал редуктора 4 обладнаний маховиком 8, що зрівнює моменти інерції та імпульсу ротора і статора, що забезпечує симетричні характеристики керованості транспортного засобу незалежно від напрямку повороту чи маневру. При зміні зусилля взаємодії ведучи х коліс з дорожнім покриттям відбувається перерозподіл обертаючого моменту між ротором 2 і статором-індуктором 5, що приводить до відповідного перерозподілу швидкостей обертання ведучих коліс як при дії класичного диференціалу. При зміні напряму руху відбувається реверсування приводного двигуна і всі розглянуті процеси відбуваються аналогічним чином. Всі інші режими руху транспортного засобу здійснюються незалежно від конструктивних особливостей приводу. Таким чином, пропонований привід транспортного засобу виключає необхідність застосування механічного міжколесного диференціалу при повній функціональній відповідності, що в ряді випадків значно поліпшує масо-габаритні та експлуатаційні показники транспортних засобів, особливо малогабаритних роботизованих транспортних систем, а також моделей і іграшок з електромеханічним приводом.
ДивитисяДодаткова інформація
Назва патенту англійськоюElectric drive for a vehicle
Автори англійськоюPabat Anatolii Ivanovych, Pabat Anastasia Anatoliivna
Назва патенту російськоюЭлектропривод транспортного средства
Автори російськоюПабат Анатолий Иванович, Пабат Анастасия Анатольевна
МПК / Мітки
МПК: H02K 7/00
Мітки: засобу, привід, транспортного
Код посилання
<a href="https://ua.patents.su/2-73620-privid-transportnogo-zasobu.html" target="_blank" rel="follow" title="База патентів України">Привід транспортного засобу</a>
Привід транспортного засобу

Номер патенту: 37625
Опубліковано: 15.05.2001
Автори: Пабат Олександр Анатолійович, Пабат Анатолій Іванович
МПК: B60L 11/18, F02B 37/00, H02K 7/00
Мітки: привід, засобу, транспортного
Формула / Реферат:
Привід транспортного засобу, що містить обладнаний датчиком потужності тепловий двигун, привідний тяговий двигун і систему керування, який відрізняється тим, що тепловий двигун додатково обладнаний датчиком токсичності вихлопних газів, з'єднаним з системою керування двигуном, а тепловий двигун за допомогою керованої муфти з´єднаний з обладнаним датчиком швидкості обертання статором—індуктором, привідного двигуна, ротори якого аа...
Дизель-електричний привід рейкового транспортного засобу

Номер патенту: 69822
Опубліковано: 15.09.2004
Автори: Житар Олександр Сергійович, Тетерев Євген Дмитрович, Захарчук Ігор Олександрович
МПК: B61C 5/00
Мітки: засобу, транспортного, дизель-електричний, привід, рейкового
Формула / Реферат:
Дизель-електричний привід рейкового транспортного засобу, що містить дизель, з’єднаний з трифазним генератором, статорна обмотка якого підключена до входів трифазного некерованого випрямляча, виходи якого паралельно з конденсатором проміжного ланцюга і гальмовим регулятором підключені до входів трифазного інвертора, до виходів якого підключені тягові двигуни, який відрізняється тим, що до виходів трифазного некерованого випрямляча підключена...
Гідропневматичний гальмівний привід довгобазового транспортного засобу
Номер патенту: 42927
Опубліковано: 15.11.2001
Автори: Кліменко Валерій Іванович, Нікітченко Ігор Миколайович, Туренко Анатолій Миколайович, Богомолов Віктор Олександрович
МПК: B60T 13/10
Мітки: привід, гідропневматичний, довгобазового, гальмівний, засобу, транспортного
Формула / Реферат:
Гідропневматичний гальмівний привід, що включає керуючу частину і гальмівний кран, з'єднаний із ресиверами та гальмівними камерами, який відрізняється тим, що керуюча частина виконана у вигляді гідроциліндра, що взаємодіє з гальмівною педаллю і виконавчими гідроциліндрами, механічно з'єднаними з гальмівними кранами, що разом із ресиверами розташовані в безпосередній близькості до кожної осі транспортного засобу.
Пневмогідравлічний привід керування зчепленням транспортного засобу

Номер патенту: 45533
Опубліковано: 15.04.2002
Автори: Кліменко Валерій Іванович, Туренко Анатолій Миколайович, Шуклінов Сергій Миколайович, Грищенко Сергій Володимирович, Богомолов Віктор Олександрович, Логвінов Валерій Павлович
МПК: B60K 23/00
Мітки: пневмогідравлічний, засобу, привід, керування, транспортного, зчепленням
Формула / Реферат:
Пневмогідравлічний привід керування зчепленням транспортного засобу, що містить педаль зчеплення, головний циліндр, ресивер, пневмогідравлічний підсилювач і трубопроводи пневмо- та гідросистем, який відрізняється тим, що головний циліндр виконано двосекційним.
Транспортний засіб, рама транспортного засобу, м’язовий привід

Номер патенту: 38133
Опубліковано: 15.05.2001
Автор: Хребтань Геннадій Анатолійович
МПК: B62K 19/00, B62M 1/00, B62K 17/00
Мітки: м'язовий, привід, транспортного, рама, засобу, транспортний, засіб
Формула / Реферат:
1. Транспортний засіб, до складу якого входять рама, поворотне та неповоротне колесо(а), сидіння, опора для рук та м'язовий привод ножним та/або ручним хитаючимися "догори-вниз' або "вперед-назад" важелями із можливістю їх автономної або синхронної роботи, із механізмом вільного ходу і гнучкою та/або жорсткою прямою або і проміжною предачою на вісь ведучого колеса, який відрізняється тим, що вісь повороту важеля приводу, що...
Попередній патент: Фармацевтична композиція, що містить агоніст рецептора nmda (варіанти) та спосіб лікування
Наступний патент: Слідкуюча система
Випадковий патент: Установка для одержання порошку кремнію