Спосіб імітації відображень від розподілених об’єктів, що рухаються, і пристрій його реалізації
Номер патенту: 17501
Опубліковано: 06.05.1997
Автори: Кравченко Микола Іванович, Бакумов Володимир Миколайович
Формула / Реферат
1. Способ имитации отражений от движущихся распределенных объектов, по которому последовательность отсчетов некоррелированного шума генерируют с периодом и задерживают на период следования отсчетов, умножают, отличающийся тем, что ее задерживают на периодов повторения зондирующего импульсного сигнала РЛС, отводят отсчеты после каждой задержки на умножают соответственно на коэффициент АР, разветвляют и умножают на и на соответственно, генерируют с периодом вторую последовательность отсчетов некоррелированного шума, задерживают на периодов отводят отсчеты после каждой задержки на умножают соответственно на коэффициент АР, разветвляют и умножают на и на соответственно, суммируют попарно результаты умножения на коэффициент АР и на задержанных отсчетов первой шумовой последовательности с результатами умножения на коэффициент АР и на задержанных отсчетов второй шумовой последовательности и результатов суммируют между собой и с очередным отсчетом первой шумовой последовательности, в результате чего получают косинусный отсчет коррелированной последовательности с доплеровским смещением, также суммируют попарно результаты умножения на коэффициент АР и на задержанных отсчетов первой шумовой последовательности с результатами умножения на коэффициент АР и на задержанных отсчетов второй шумовой последовательности и результатов суммируют между собой и с очередным отсчетом второй шумовой последовательности, в результате чего получают синусный отсчет коррелированной последовательности с доплеровским смещением.
2. Устройство имитации отражений от движущихся распределенных объектов, содержащее первый и второй генераторы последовательностей отсчетов некоррелированного шума, первую и вторую линии задержки, первый умножитель, входы которого соединены с выходами линий задержки, отличающееся тем, что в него введены первый и второй сумматоры, выходы которых соединены со входами первой и второй линии задержки соответственно и являются выходами устройства, а входы соединены с первым и вторым генераторами соответственно, и представляют -ячеечную схему, в каждую из ячеек которой дополнительно введены второй, третий, четвертый, пятый и шестой умножители, третий и четвертый сумматоры, при этом выходы первой и второй линий задержки предыдущей ячейки соединены со входами первой и второй линии задержки последующей ячейки и со входами первого и шестого умножителей соответственно, выходы которых соединены со входами второго, третьего, четвертого и пятого умножителей, выходы второго и четвертого умножителей соединены со входами третьего сумматора, выход которого соединен с одним из входов первого сумматора, а выходы третьего и пятого умножителей соединены со входами четвертого сумматора ячейки, выход которого соединен с одним из входов второго сумматора.
Текст
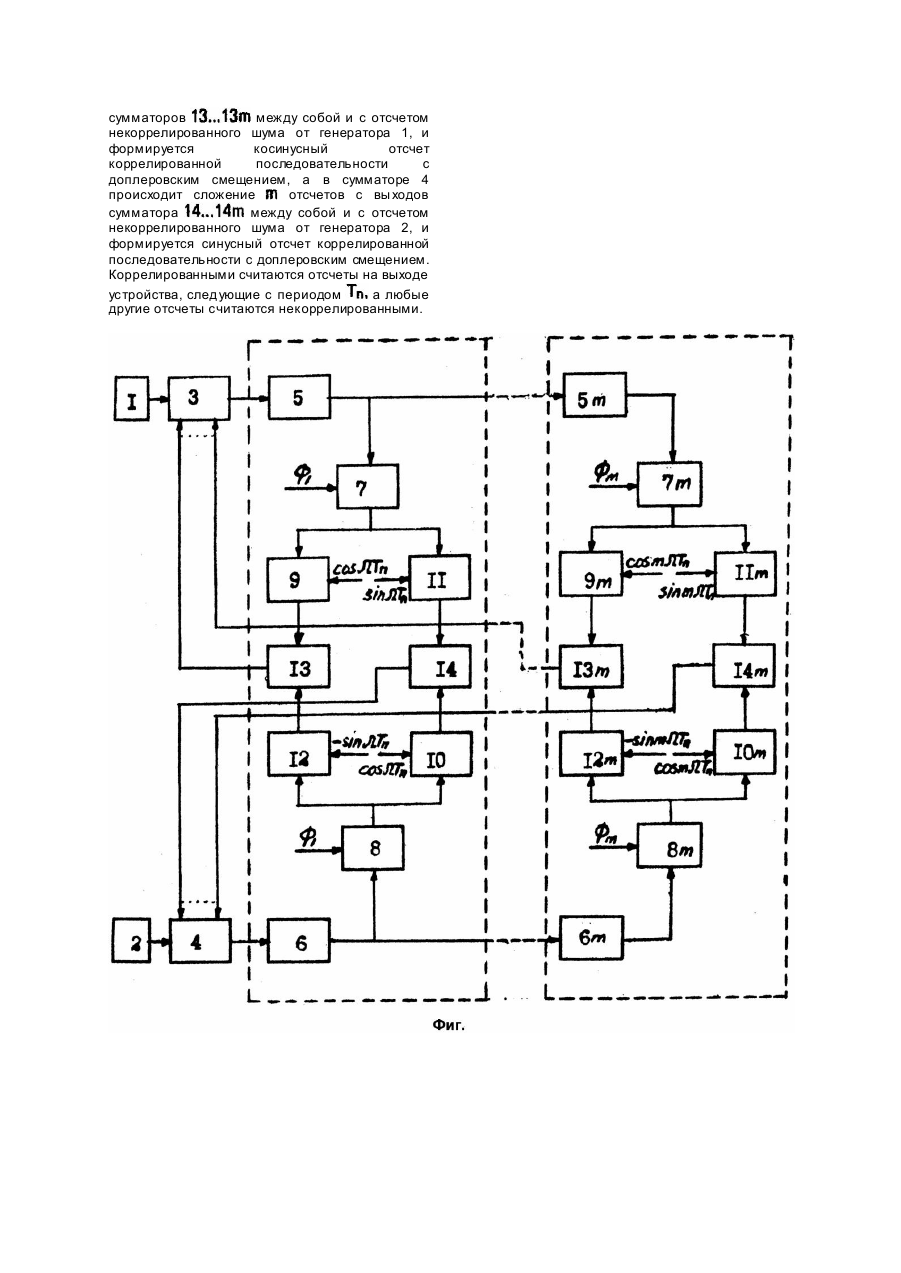
Изобретение относится к радиолокации и может быть использовано при проектировании методом моделирования систем помехозащищенных радиолокационных станций (РЛС), систем распознавания различных движущи хся объектов, а также при построении имитаторов и тренажеров, используемых для контроля функционирования РЛС и при обучении обслуживающего персонала. В современных и перспективных РЛС широко используются цифровые системы обработки информации, в связи с чем значительный интерес представляют способы имитации отраженных сигналов в цифровой форме. В литературе (Марпл С.Л. - мл. Цифровой спектральный анализ и его приложения. - М.: Мир, 1990) описана теория векторного (многоканального) процесса авторегрессии (АР), где решалась задача цифрового спектрального оценивания векторных случайных процессов, однако, не было приведено способа получения отсчетов векторного процесса АР из некоррелированного шума и, следовательно, не решалась задача имитации. Наиболее близким по существенным признакам к заявляемому является способ имитации отражения от распределенных объектов (патент США №5047782, кл. G01S7/40, ИСМ вып.85, №18, 1993), по которому сигнал генерируется передатчиком РЛС и поступает на приемную антенну имитатора, а с его выхода, преобразованный в оптический диапазон, имитационный сигнал передается на приемное устройство РЛС. Однако, такой способ имитации требует включения в работу радиочастотного тракта РЛС, что усложняет систему имитации, так как необходимо принимать, дважды преобразовывать и передавать сигнал. Известен имитатор эхо-сигналов дипольных отражателей, содержащий генераторы дальности, азимута и интенсивности эхо-сигнала и, соответственно, счетчики, память хранения заранее записанных эталонных данных, сдвиговые регистры, цифроаналоговый преобразователь, схему формирования видеосигнала (Патент Японии №4 - 1310, кл, G01S7/40, ИСМ вып. 85, №13, 1993). Однако данный имитатор воспроизводит имитационный сигнал только при наличии заранее записанных эталонных данных о целях, которые занимают большой объем цифровой памяти. При этом нет представления о статистических характеристиках имитационного сигнала и нет возможности их корректировать, поскольку в схеме нет автономного формирователя коррелированного случайного процесса. Наиболее близким по совокупности признаков является устройство, реализующее способ имитации реверберационной помехи от гидроакустических объектов (А.с. СССР № 543904, кл. G01S7/40, Бюл. №3, 1977), содержащее генератор шума, генератор сигнала, два квантователя, две рециркуляционные линии задержки, умножитель, фильтр низкой частоты и регулируемый усилитель. Квантованный шум и сигнал задерживаются в рециркуляционных линиях задержки, перемножаются и передаются на вход фильтра низкой частоты, восстанавливающего из отсчетов аналоговый сигнал. Регулировкой усиления меняется интенсивность реверберационной помехи. При этом на каждый последующий отсчет генерируемого сигнала, благодаря рециркуляционным линиям задержки, накладывается ослабленный предыдущий отсчет и, таким образом, имитируется реверберация помехи. Однако, корреляция между отсчетами помехи не регулируется из-за отсутствия в схеме регуляторов величины задержанной обратной связи в рециркуляционной линии задержки. Кроме того, не создается доплеровское смещение помехи из-за отсутствия в схеме квадратурных каналов. В основу изобретения поставлена задача создания способа и устройства имитации отражений от движущи хся распределенных объектов путем введения новых действий над отсчетами некоррелированного шума за счет применения новых блоков и связей в устройстве, обеспечивающих высокую точность имитации отраженного сигнала, поступающего с выходов квадратурных фазовых детекторов приемного устройства доплеровской РЛС. Такой технический результат может быть достигнут, если в способе имитации отражений от движущи хся распределенных объектов, по которому последовательность отсчетов некоррелированного шума генерируют с периодом задерживают на период следования отсчетов, умножают, согласно изобретению, ее задерживают на периодов повторения зондирующего импульсного сигнала РЛС отводят отсчеты после каждой задержки на умножают соответственно на коэффициент АР, разветвляют и умножают на и на соответственно, где доплеровская частота отраженного радиолокационного сигнала. Генерируют с периодом вторую последовательность отсчетов некоррелированного шума, задерживают на периодов отводят отсчеты после каждой задержки на умножают соответственно на коэффициент АР, разветвляют и умножают на и на соответственно. Суммируют попарно результаты умножения на коэффициент АР и на задержанных отсчетов первой шумовой последовательности с результатами умножения на коэффициент АР и на задержанных отсчетов второй шумовой последовательности и результатов суммируют между собой и с отсчетом первой шумовой последовательности, в результате чего получают косинусный отсчет коррелированной последовательности с доплеровским смещением. Также суммируют попарно результаты умножения на коэффициент АР и на задержанных отсчетов первой шумовой последовательности с результатами умножения на коэффициент АР и на задержанных отсчетов второй шумовой последовательности и результатов суммируют между собой и с отсчетом второй шумовой последовательности, в результате чего получают синусный отсчет коррелированной последовательности с доплеровским смещением. Полученные косинусные и синусные отсчеты снова задерживают на периодов и процесс формирования циклично повторяется, что обеспечивает межпериодную корреляцию между выходными отсчетами, следующими с периодом Численные значения коэффициентов АР и число определяют функцию корреляции имитационной последовательности, а число - доплеровский набег фазы за период Период относится к периоду следования отсчетов некоррелированного шума как период повторения импульсного зондирующего сигнала РЛС к длительности зондирующего импульса, что позволяет имитировать отражения практически от любой ячейки дальности. Кроме того, в устройство имитации отражений от движущи хся распределенных объектов, содержащее первый и второй генераторы последовательностей отсчетов некоррелированного шума, первую и втор ую линии задержки, первый умножитель, вход которого соединен с выходом линии задержки, согласно изобретению, введены первый и второй сумматоры, выходы которых соединены со входами первой и второй линии задержки, соответственно, и являются выходами устройства, а входы соединены с первым и вторым генераторами, соответственно, и представляют -ячеечную схему, в каждую из ячеек которой дополнительно введены второй, третий, четвертый, пятый и шестой умножители, третий и четвертый сумматоры, при этом выходы первой и второй линии задержки предыдущей ячейки соединены со входами первой и второй линии задержки последующей ячейки и со входами первого и шестого умножителей, соответственно, выходы которых соединены со входами второго, третьего, четвертого и пятого умножителей, выходы второго и четвертого умножителей соединены со входами третьего сумматора, выход которого соединен с одним из входов первого сумматора вне ячейки, а выходы третьего и пятого умножителей соединены со входами четвертого сумматора, выход которого соединен с одним из входов второго сумматора вне ячейки. Выполнение заявляемого устройства имитации отражений от движущихся распределенных объектов -ячеечным с введенными в каждую ячейку вторым, третьим, четвертым, пятым и шестым умножителями, третьим и четвертым сумматорами, а также первым и вторым сумматорами вне ячеек, формирующим имитационный сигнал с заданной функцией корреляции в виде двух квадратурных последовательностей отсчетов с регулир уемым доплеровским смещением, позволяет обеспечить высокую точность имитации отраженного сигнала. На чертеже (фиг.) представлена структурная схема устройства имитации отражений от движущи хся распределенных объектов. Устройство содержит первый и второй генераторы 1, 2 последовательностей отсчетов некоррелированного шума, первый и второй сумматоры 3, 4, первые и вторые линии задержки умножители на коэффициенты АР, косинусные умножители синусные умножители минус-синусные умножители ячеек При этом выходы генераторов 1, 2 последовательностей отсчетов некоррелированного шума подключены к первым входам сумматоров 3, 4, соответственно. Выходы сумматоров 3, 4, являясь выходами устройства, подключены ко входам линий задержки 5, 6 первой ячейки, выходы которых подключены ко входам линий задержки второй ячейки и т.д. до линий задержки ячейки. Выходы линий задержки каждой ячейки подключены к первым входам умножителей 7, 8, вторые входы которых подключены к формирователям значения коэффициента авторегрессии ячейки. Выход умножителя 7 разветвлен и подключен к первым входам умножителей 9, 11, а выход умножителя 8 разветвлен и подключен к первым входам умножителей 12, 10. Вторые входы умножителей 9, 11, 12, 10 подключены соответственно к формирователям значений косинуса, синуса, минус-синуса и косинуса произведения на номер ячейки. Значения коэффициентов АР, а также косинуса, синуса и минус-синуса задаются двоичным параллельным кодом с помощью наборов переключателей, коммутирующи х каждый бит либо на общий провод, либо на источник напряжения. В каждой ячейке выходы умножителей 9, 12 подключены соответственно к первому и второму входам сумматора 13, выход которого подключен к одному из входов сумматора 3 вне ячейки, а выходы умножителей 11, 10 подключены соответственно к первому и второму входам сумматора 14, выход которого подключен к одному из входов сумматора 4 вне ячейки. Способ реализуется следующим образом. Текущие квадратурные (косинусный и синусный) отсчеты коррелированной последовательности с выходов сумматоров 3, 4 поступают с периодом на выход устройства, где длительность импульса зондирующего сигнала РЛС, а также на входы линий задержки 5, 6 первой ячейки, в которых задерживаются на и поступают на входы линий задержки второй ячейки и т.д.до линий задержки ячейки. В каждой линии задержки накапливается отсчетов и появление на ее выходе отсчета происходит при поступлении на вход очередного отсчета. С выходов линий задержки в каждой ячейке отсчеты соответственно поступают на первые входы умножителей 7, 8, в которых умножаются на соответствующий номеру ячейки коэффициент АР, вы хода умножителя 7 отсчеты поступают на первые входы умножителей 9, 11, в которых соответственно, умножаются на косинус и на синус произведения доплеровского набега фазы на номер ячейки, а с выхода умножителя 8 отсчеты поступают на первые входы умножителей 12, 10, в которых соответственно умножаются на минус-синус и на косинус произведения на номер ячейки. С выходов умножителей 9, 12 отсчеты поступают в сумматор 13, а с его выхода на один из входов сумматора 3 вне ячейки. С выходов умножителей 10, 11 отсчеты поступают в сумматор 14, а с его выхода на один из входов сумматора 4 вне ячейки. При этом в сумматоре 3 происходит сложение отсчетов с выходов сумматоров между собой и с отсчетом некоррелированного шума от генератора 1, и формируется косинусный отсчет коррелированной последовательности с доплеровским смещением, а в сумматоре 4 происходит сложение отсчетов с вы ходов сумматора между собой и с отсчетом некоррелированного шума от генератора 2, и формируется синусный отсчет коррелированной последовательности с доплеровским смещением. Коррелированными считаются отсчеты на выходе устройства, следующие с периодом а любые другие отсчеты считаются некоррелированными.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for imitation of reflections from moving distributed objects and appliance for its realization
Автори англійськоюKravchenko Mykola Ivanovych, Bakumov Volodymyr Mykolaiovych
Назва патенту російськоюСпособ имитации отражений от распределенных движущихся объектов и устройство для его реализации
Автори російськоюКравченко Николай Иванович, Бакумов Владимир Николаевич
МПК / Мітки
МПК: G01S 7/40
Мітки: розподілених, реалізації, відображень, рухаються, об'єктів, спосіб, пристрій, імітації
Код посилання
<a href="https://ua.patents.su/3-17501-sposib-imitaci-vidobrazhen-vid-rozpodilenikh-obehktiv-shho-rukhayutsya-i-pristrijj-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб імітації відображень від розподілених об’єктів, що рухаються, і пристрій його реалізації</a>
Спосіб контролю імпульсів зі сплощенною вершиною та пристрій для його реалізації
Номер патенту: 6349
Опубліковано: 29.12.1994
Автори: Ванько Володимир Михайлович, Дороніна Ольга Михайлівна, Лавров Геннадій Миколайович
МПК: G01R 19/04
Мітки: пристрій, сплощенною, вершиною, спосіб, реалізації, імпульсів, контролю
Формула / Реферат:
1. Способ контроля импульсов с уплощенной вершиной, заключающийся в инвертировании входного сигнала, задержке во времени и суммировании с исходным, сравнении результирующего сигнала с первым опорным уровнем и измерении в моменты перехода этого сигнала с уровня, превышающего по модулю первый опорный, на уровень, меньший по модулю опорного уровня, отличающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения...
Спосіб вимірювання пікової напруги електричних імпульсів та пристрій для його реалізації
Номер патенту: 14790
Опубліковано: 18.02.1997
Автори: Балабан Василь Михайлович, Соловйов Валентин Сергійович, Тимофеєв Євген Петрович
МПК: G01R 19/04
Мітки: пікової, реалізації, напруги, спосіб, електричних, пристрій, імпульсів, вимірювання
Формула / Реферат:
1. Способ измерения пикового напряжения электрических импульсов, при котором один электрический импульс длительностью подают на вход диодно-емкостной запоминающей ячейки с постоянной цепи заряда и по величине напряжения на конденсаторе определяют пиковое напряжение электрического импульса отличающийся тем, что исходный электрический импульс преобразуют в два электрических импульса и такой же длительности и одинаковой амплитуды, равной...
Спосіб розпізнавання симетричності зображень об’єктів і пристрій для його реалізації
Номер патенту: 3741
Опубліковано: 27.12.1994
Автори: Мартинюк Тетяна Борисівна, КРАСИЛЕНКО ВОЛОДИМИР ГРИГОРОВИЧ, Кожем'яко Володимир Прокопович, Буда Антоніна Георгіївна
МПК: G06K 9/58, G06K 9/52, G06K 11/00
Мітки: реалізації, пристрій, зображень, спосіб, розпізнавання, об'єктів, симетричності
Формула / Реферат:
1. Способ распознавания симметричности изображений объектов, включающий формирование светового потока исходного изображения в неподвижной системе координат с первой и второй ортогональными осями, разделение сформированного светового потока на два одинаковых равноинтенсивных световых потока, пространственную модуляцию первого и второго разделенных световых потоков вдоль одноименной координатной оси с симметрией относительно другой...
Спосіб перетворення часового зсуву між двома сигналами та пристрій для його реалізації
Номер патенту: 11443
Опубліковано: 25.12.1996
Автори: Погребенник Володимир Дмитрович, Сопрунюк Петро Маркіянович
МПК: G04F 10/00
Мітки: зсуву, сигналами, двома, пристрій, перетворення, спосіб, часового, реалізації
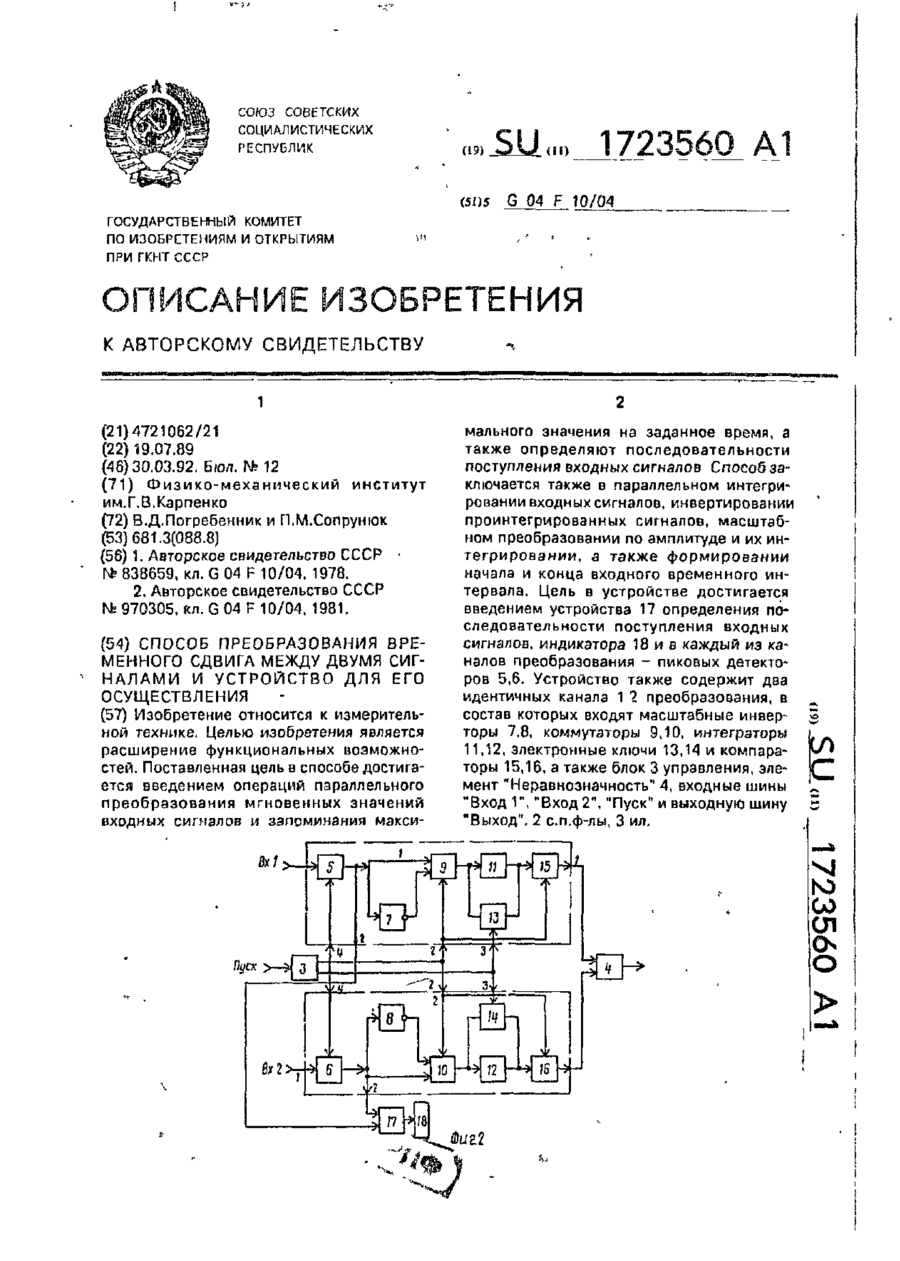
Формула / Реферат:
1. Способ преобразования временного сдвига между двумя сигналами, заключающийся в параллельном интегрировании входных сигналов в течение времени, большего длительности фронтов и ожидаемой длительности между сигналами, инвертировании проинтегрированных сигналов, масштабном преобразовании по амплитуде и их интегрировании, формировании начала и конца входного временного интервала при достижении интегрируемым сигналом нулевого уровня,...
Спосіб визначення активної потужності в трьохфазному ланцюгу і пристрій для його втілення
Номер патенту: 2060
Опубліковано: 20.12.1994
Автор: Кизилов Володимир Улянович
МПК: G01R 21/06
Мітки: визначення, втілення, спосіб, активної, потужності, пристрій, ланцюгу, трьохфазному
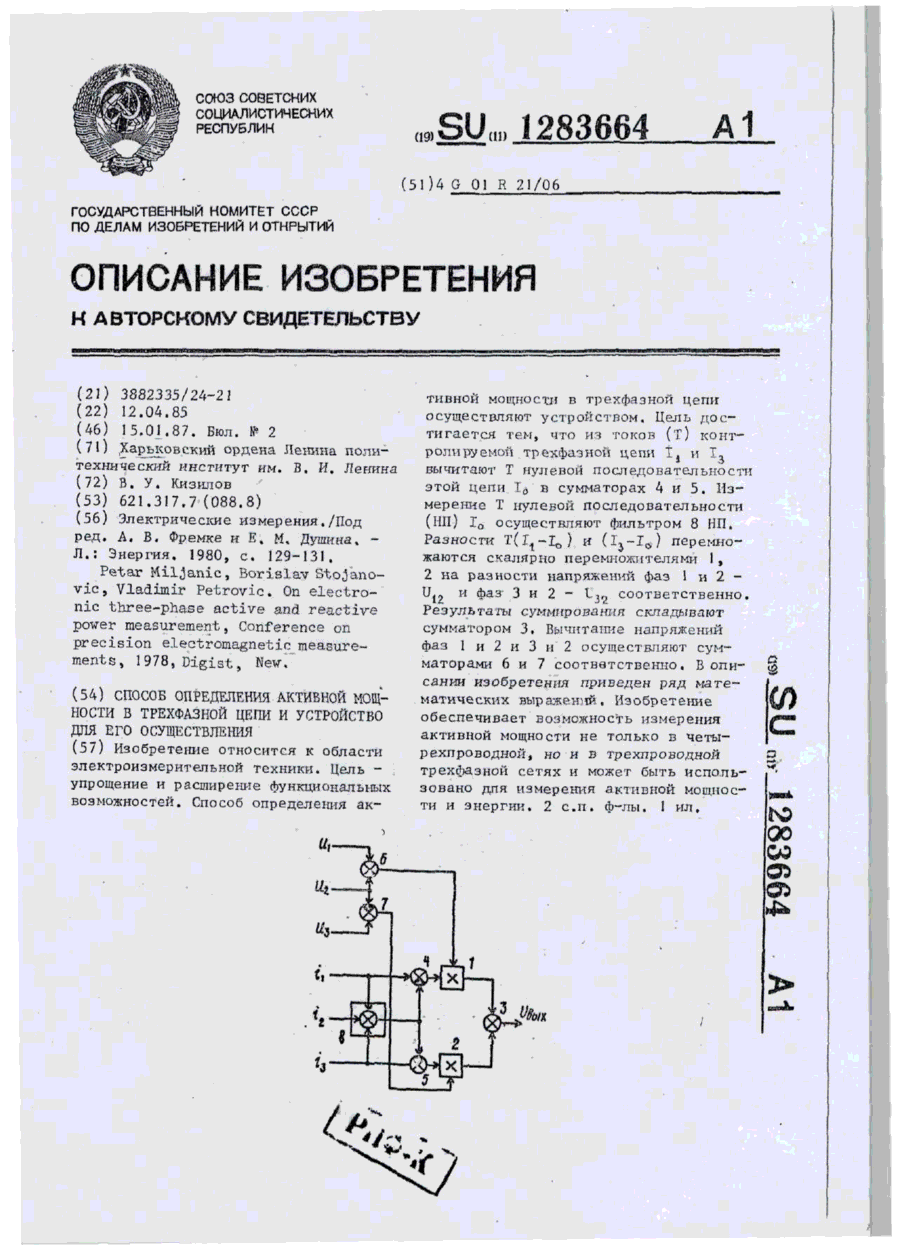
Формула / Реферат:
1. Способ определения активной мощности в трехфазной цепи, состоящий в измерении токов двух фаз и двух междуфазных напряжений, например между первой и второй и между третьей и второй фазами, перемножении значений этих напряжений на значения токов первой и третьей фаз соответственно и суммировании результатов перемножений, отличающийся тем, что, с целью упрощения и расширения функциональных возможностей, измеряют ток нулевой...
Попередній патент: Спосіб діагностики порушень травлення в ранньому післяопераційному періоді
Наступний патент: Градирня
Випадковий патент: Діелектрична антена