Бункерний завантажувальний пристрій
Номер патенту: 21276
Опубліковано: 15.03.2007
Автори: Сілаєв Олександр Володимирович, Стаднік Яків Феодосійович
Формула / Реферат
Бункерний завантажувальний пристрій, що містить датчики рівнів заповнення чаші бункера і перегрібачі в чаші передбункера, який відрізняється тим, що датчики рівня деталей в чаші бункера установлені по вертикалі на відповідні оптимальні граничні рівні і по горизонталі на конструктивній відстані, а вібратори, як перегрібачі в передбункері, установлені на протилежних сторонах його чаші і включені в протифазі.
Текст
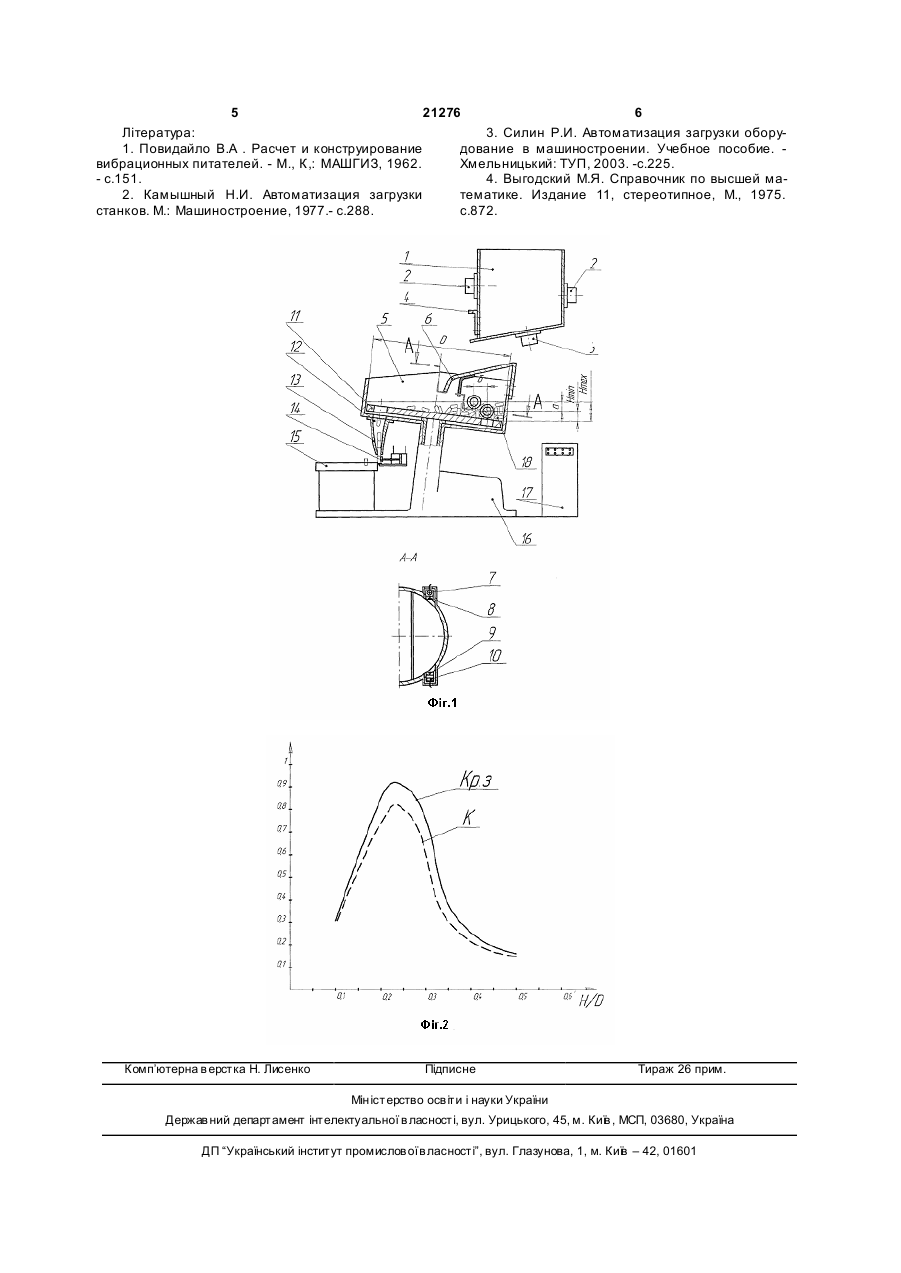
Бункерний завантажувальний пристрій, що містить датчики рівнів заповнення чаші бункера і перегрібачі в чаші передбункера, який відрізняється тим, що датчики рівня деталей в чаші бункера установлені по вертикалі на відповідні оптимальні граничні рівні і по горизонталі на конструктивній відстані, а вібратори, як перегрібачі в передбункері, установлені на протилежних сторонах його чаші і включені в протифазі. (19) (21) u200608697 (22) 03.08.2006 (24) 15.03.2007 (46) 15.03.2007, Бюл. № 3, 2007 р. (72) Стадник Яків Феодосійович, Сілаєв Олександр Володимирович (73) ХМЕЛЬНИЦЬКИЙ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ 3 21276 4 В даному випадку використовуються деталі На основі проведених експериментів (Фіг.2) для механічної обробки або складання типу ковпадля циліндричних чаш з вертикальною віссю причка (корпус конденсатора) 18. Можливе викорисймаємо Нmin=0,2Д, Нmax=0,3Д. тання деталей іншої форми. Звідси відповідні об'єми: Датчики установлені по висоті на відстані «а». p´D2 2 (2) Верхній на висоті Нmax і нижній на висоті Н min. Vmin = ´ H min = 0,157 ´ D , 4 Віддалі по висоті «а» - розрахункова в границях p ´ D2 2 (3) Vmax = ´ H max = 0,235 ´ D , Н/Д=0,2 ¸ 0,3 (1) 4 де Н - висота заповнення чаші; Якщо чаша бункерного завантажувального Д - діаметр чаші. пристрою буде під кутом до вертикалі, то з цих По горизонталі датчики розміщують на відстані об'ємів визначають висоту твірних hmin і hmax за «б», яка вибирається з конструктивних міркувань виразом [4,с.669] (циліндрична підковка): (можливості розмірного реального розміщення). Vmin hmin = У випадку використання різноманітних типів (4) 2 ´ R2 (БЗП) схема розміщення датчиків не змінюється по 3 суті. V hmax = max ; В даному випадку маємо різновид карманчи2 ´R2 кового БЗП. 3 (5) Можливо здійснити поставлену задачу у різних D R= . типів БЗП. Наприклад, простіше використовувати 2 вібраційний завантажувальний пристрій, тобто такі У випадку якщо чаша немає форми діаметру, пристрої, які мають вертикальні вісі (без нахилу до то площа і об'єм вираховуються через периметр горизонту). чаші. Відомо, що продуктивність БЗП є випадковою Через верхню точку твірних проводять горизо(ймовірною) величиною, яка коливається в значнталі нижнього і верхнього рівня; на цих горизонних границях відповідно [3, с.114, Фіг.6.6], тому талях установлюють відповідні датчики. часто користуються середнім (загальним) значенЕксперименти також показали менші в два раням коефіцієнта К [1, с.106]: зи коливання продуктивності в поточному часі за K=Q/Qт, амплітудою порівняно з представленими в роботі де Q - фактична продуктивність; [3, с.114, Фіг.2]. Qт - теоретична (максимально можлива) проПояснюється це кращими умовами захоплення дуктивність. деталей робочим органом БЗП. Верхні деталі при Загальний коефіцієнт заповнення К залежить цьому створюють менший статичний тиск на нижні від багатьох факторів [3, с.121, 125, формула деталі, які якраз знаходяться в зоні захоплення, (9.3)]: коефіцієнта западання в захватний орган, менше лишають можливості самозахоплення, наявності пустих проміжків після кожного етапу зменшуються енергетичні затрати. орієнтування, кількості етапів орієнтованих заготоПослідовність роботи БЗП здійснюється навок (деталей), від форми деталей та співвідноступним чином (Фіг. 1). Деталі (матеріал) заванташення їх розмірів, коефіцієнтів тертя, від кута нажують в передбункер, включають систему керухилу ча ші до горизонту і т. п. вання завантаженням БЗП 17; деталі при відкритій Враховування всіх факторів є бажаним, але ж регульованій заслінці 4 по висоті під дією сил ваги практично нереально і не завжди можливим. і вібрації поступають в чашу вібробункера 5 по На основі багатократних досліджень автори лотку і світлозахисному фартуху 6. вважають, що одним з найважливіших факторів в Оптичні датчики 7 фіксують постійно в часі попроцесах завантаження є коефіцієнт рівня заповложення верхнього і нижнього установлених рівній нення чаші бункера Кр.з, який визначається в ексдеталей в чаші. При цьому деталі виносяться диспериментальних роботах відношенням висоти рівком (захватним органом) 11 із навали (об'єму) деня заповнення чаші бункера Н до його діаметру Д талей в пристрій вторинної орієнтації 12 і потім в (цієї чаші), тобто - Н/Д. магазин 13. Відсікачем 14 подаються в робочу В літературних джерелах і патентних матеріазону 15 (металообробки або складання); .після лах визначення цього коефіцієнта не приводиться. цього оброблені деталі поступають в тару не На Фіг.2 представлено графіки зміни загальнопредставлену на рисунку. го коефіцієнта завантаження БЗП - К і коефіцієнта При досягнення рівня деталей 18 в чаші 5 до рівня заповнення чаші - Кр.з бункера в залежності Hmax подача деталей із перед бункера 1 припинявід співвідношення Н/Д. Криві побудовані на ексється. Після зменшення рівня деталей в чаші до периментальних даних. Нmin автоматично включається система керування Аналіз кривих показує можливість апроксимазавантаженням і деталі поступають в чашу 5 до ції всіх показників, які входять в загальний коефітих пір доки рівень не досягне Hmax; тобто цикл цієнт заповнення К одним коефіцієнтом Кр.з і що завантаження повторюється, при цьому робота найкращі значення продуктивності знаходяться захватного і інших вузлів не змінюється. при: Впровадження корисної моделі дозволяє підН/Д=0,2 ¸ 0,3 (1) вищити продуктивність, надійність, рівень автомапри цьому продуктивність збільшується на 5тизації. Крім того підвищується об'єктивність і ви10%. значеність керування процесом заповнення бункерним завантажувальним пристроєм. 5 21276 6 Література: 3. Силин Р.И. Автоматизация загрузки обору1. Повидайло В.А . Расчет и конструирование дование в машиностроении. Учебное пособие. вибрационных питателей. - М., К,: МАШГИЗ, 1962. Хмельницький: ТУП, 2003. -с.225. - с.151. 4. Выгодский М.Я. Справочник по высшей ма2. Камышный Н.И. Автоматизация загрузки тематике. Издание 11, стереотипное, М., 1975. станков. М.: Машиностроение, 1977.- с.288. с.872. Комп’ютерна в ерстка Н. Лисенко Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFeed hopper
Назва патенту російськоюБункерное загрузочное устройство
МПК / Мітки
МПК: B65G 65/30, F27D 3/00
Мітки: бункерний, пристрій, завантажувальний
Код посилання
<a href="https://ua.patents.su/3-21276-bunkernijj-zavantazhuvalnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Бункерний завантажувальний пристрій</a>
Завантажувальний пристрій шахтної печі
Номер патенту: 73124
Опубліковано: 15.06.2005
Автор: Ірніч Франц-Йозеф
МПК: F16K 3/02, C21B 7/18, B65G 65/30, C21B 7/20
Мітки: пристрій, завантажувальний, печі, шахтної
Формула / Реферат:
1. Завантажувальний пристрій (100; 100'; 300) для завантажування матеріалів у шахтну піч (101; 301) з щонайменше одного накопичувального бункера (103, 105; 303, 305) за допомогою завантажувального поворотного лотка (111; 311), який складається з циліндричного основного корпусу (107; 307), що повертається за допомогою першого приводу (119) навколо першої, по суті, вертикально орієнтованої осі (А1) повороту, і завантажувального лотка (111;...
Бункерний пристрій
Номер патенту: 68473
Опубліковано: 16.08.2004
Автори: Зеленін Віталій Іванович, Левченко Сергій Сергійович, Кавуненко Петро Михайлович, Максимович Боліслав Іванович
МПК: B65D 90/00
Формула / Реферат:
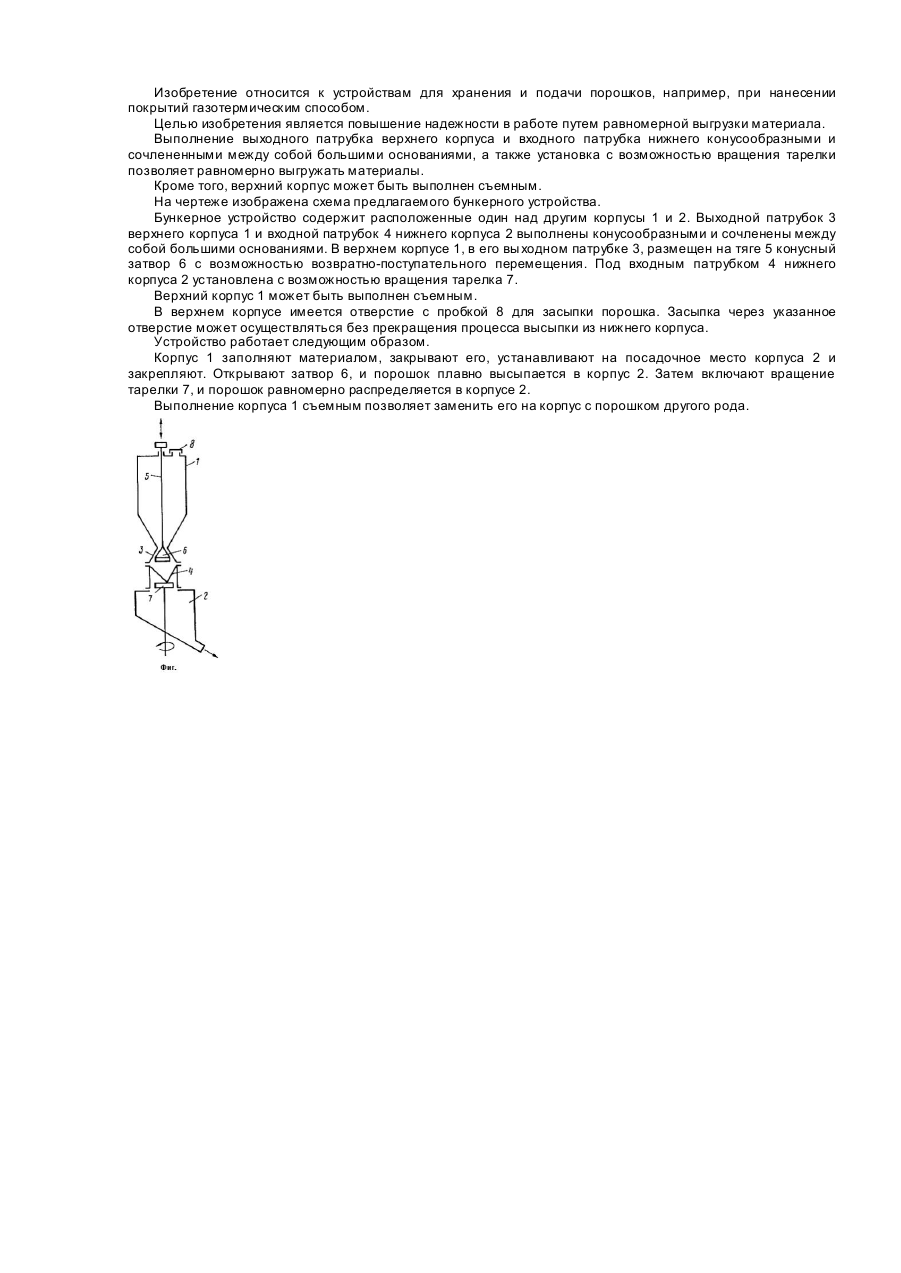
1. Бункерное устройство, содержащее расположенные один над другим корпусы так, что выходной патрубок верхнего корпуса сочленен с входным патрубком нижнего, и конусный -затвор, размещенный в выходном патрубке верхнего корпуса, отличающегося тем, что с целью повышения надежности в работе путем равномерной выгрузки материала, выходной патрубок верхнего корпуса и входной патрубок нижнего выполнен конусообразными и сочленены между собой большими...
Завантажувальний пристрій для доменної печі
Номер патенту: 47469
Опубліковано: 15.07.2002
Автор: Акселссон Йор'ян
МПК: C21B 7/20
Мітки: печі, завантажувальний, доменної, пристрій
Формула / Реферат:
1. Завантажувальний пристрій для доменної печі з корпусом, у верхній частині якого розташований отвір, що закривається, який містить нерухомий бункер з нижнім отвором, що закривається, у який за допомогою подавального пристрою подаються вихідні матеріали, який відрізняється тим, що в ньому є обертовий бункер із нижнім отвором, що закривається, який розташований між отвором доменної печі і нерухомим бункером та до якого кріпиться кришка, що...
Завантажувальний пристрій

Номер патенту: 8329
Опубліковано: 29.03.1996
Автори: Едуард Лежилль, Еміль Лонарді, Герман Шильц
МПК: F27B 1/20, B65G 65/30, C21B 7/20, C21B 7/18
Мітки: завантажувальний, пристрій
Формула / Реферат:
Загрузочное устройство для шахтной печи, содержащее желоб распределения вращательного или вибрационного типа, расположенный над желобом бункер с патрубком центральной подачи, связанный с органом дозировки симметричного действия, имеющим механизм привода, над бункером расположены два резервуара, снабженные верхней и нижней заслонками уплотнения, связанные с органом дозировки, отличающееся тем, что, с целью упрощения конструкции, в него...
Завантажувальний пристрій печі безперервного коксування
Номер патенту: 13893
Опубліковано: 25.04.1997
Автори: Кутняшенко Ігор Вікторович, Парфенюк Олександр Сергійович, Поролов Володимир Васильович, Веретельник Святослав Петрович, Топоров Андрій Анатольович, Колесников Олександр Григорович
МПК: C10B 31/00
Мітки: безперервного, печі, завантажувальний, коксування, пристрій
Формула / Реферат:
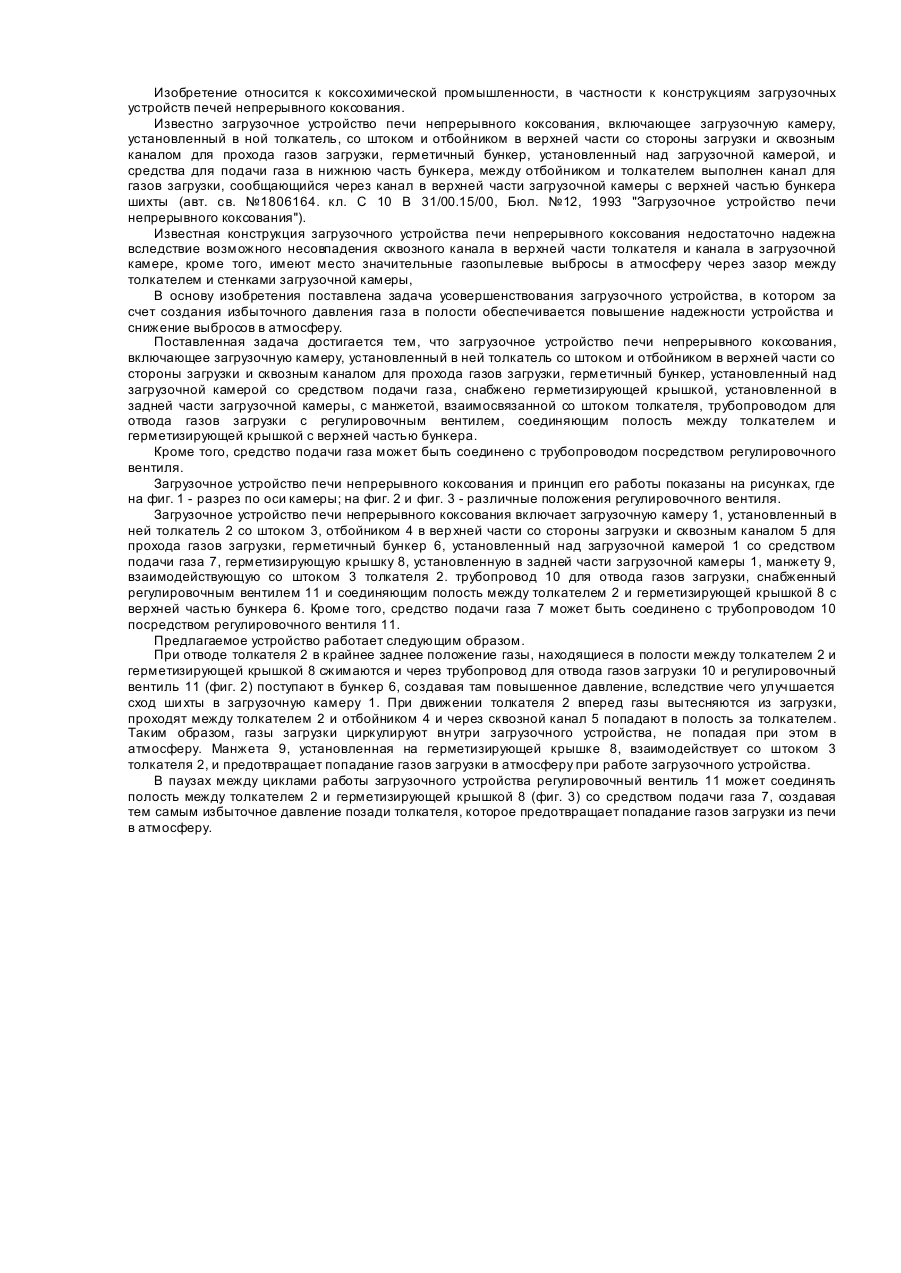
1 .Загрузочное устройство печи непрерывного коксования, включающее загрузочную камеру, установленный в ней толкатель со штоком и отбойником в верхней части со стороны загрузки и сквозным каналом для прохода газов загрузки, герметичный бункер, установленный над загрузочной камерой со средством подачи газа, отличающееся тем, что оно снабжено герметизирующей крышкой, установленной в задней части загрузочной камеры, с манжетой,...
Попередній патент: Спосіб лікування хворих з больовим синдромом, обумовленим остеохондрозом хребта
Наступний патент: Спосіб керування процесом заповнення чаші бункерного завантажувального пристрою
Випадковий патент: Елемент насадки масообмінного апарата