Спосіб керування процесом заповнення чаші бункерного завантажувального пристрою
Номер патенту: 21277
Опубліковано: 15.03.2007
Формула / Реферат
Спосіб керування процесом заповнення чаші бункерного завантажувального пристрою, що включає визначення границь завантаження чаші бункера по висоті, який відрізняється тим, що заповнення чаші бункера по висоті здійснюють через значення рівнів, при яких оптимальне значення нижнього і верхнього рівнів заповнення чаші визначають відношенням висоти заповнення чаші бункера до її діаметра в границях ![]() , де Н – висота засипки чаші, Д – діаметр чаші.
, де Н – висота засипки чаші, Д – діаметр чаші.
Текст
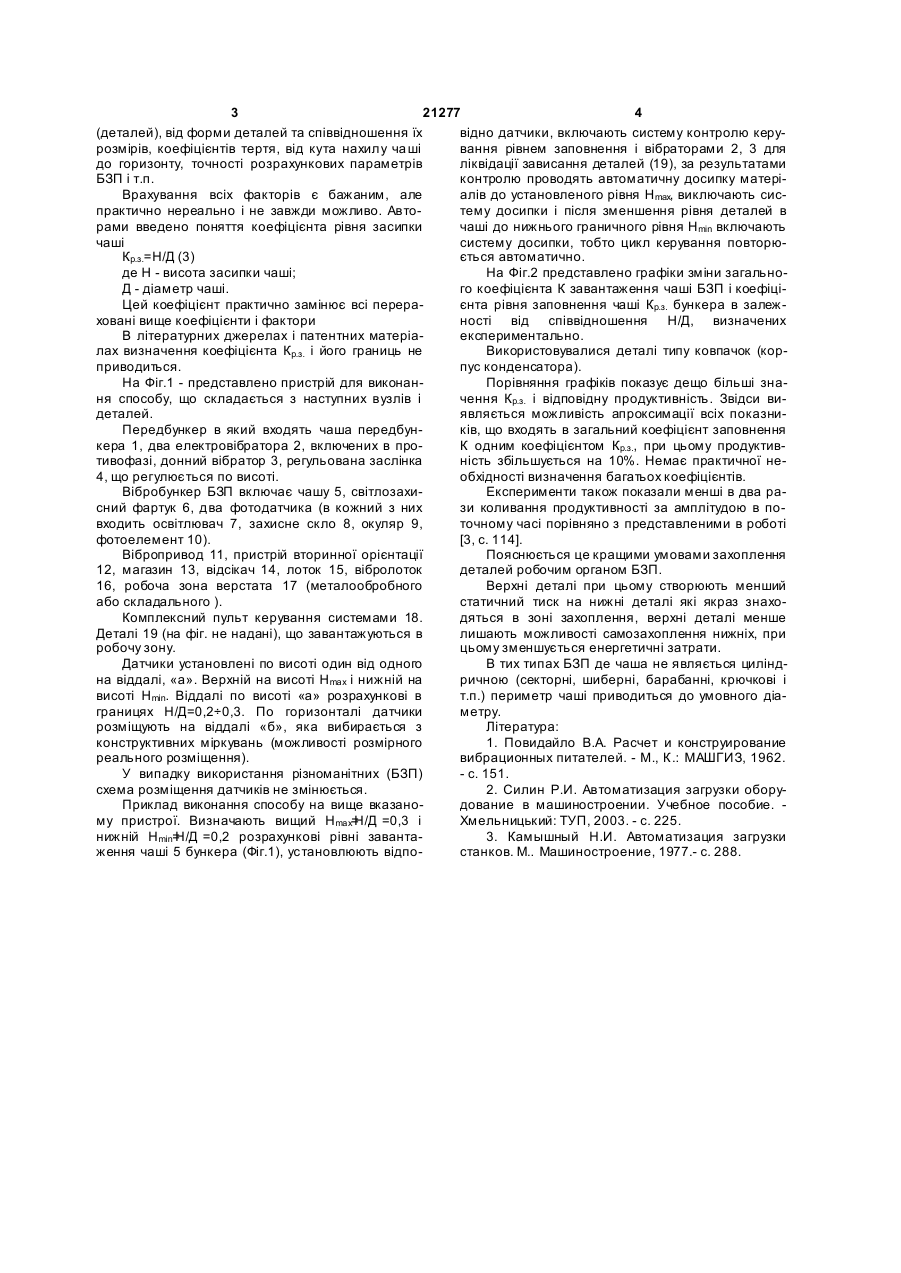
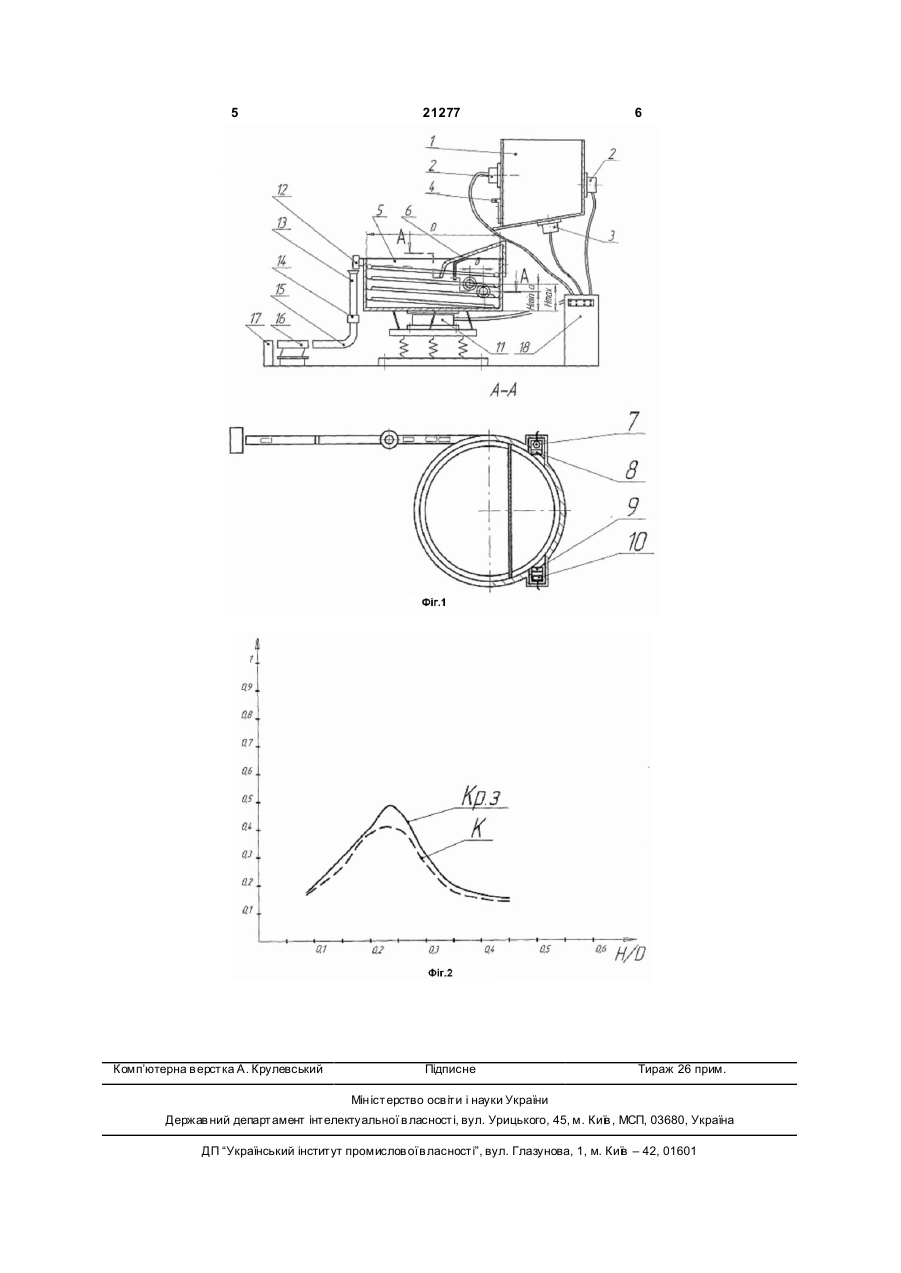
Спосіб керування процесом заповнення чаші бункерного завантажувального пристрою, що 3 21277 4 (деталей), від форми деталей та співвідношення їх відно датчики, включають систему контролю керурозмірів, коефіцієнтів тертя, від кута нахилу ча ші вання рівнем заповнення і вібраторами 2, 3 для до горизонту, точності розрахункових параметрів ліквідації зависання деталей (19), за результатами БЗП і т.п. контролю проводять автоматичну досипку матеріВрахування всіх факторів є бажаним, але алів до установленого рівня Н mах, виключають сиспрактично нереально і не завжди можливо. Автотему досипки і після зменшення рівня деталей в рами введено поняття коефіцієнта рівня засипки чаші до нижнього граничного рівня Hmin включають чаші систему досипки, тобто цикл керування повторюКр.з.=Н/Д (3) ється автоматично. де Н - висота засипки чаші; На Фіг.2 представлено графіки зміни загальноД - діаметр чаші. го коефіцієнта К завантаження чаші БЗП і коефіціЦей коефіцієнт практично замінює всі перераєнта рівня заповнення чаші Кр.з. бункера в залежховані вище коефіцієнти і фактори ності від співвідношення Н/Д, визначених В літературних джерелах і патентних матеріаекспериментально. лах визначення коефіцієнта Кр.з. і його границь не Використовувалися деталі типу ковпачок (корприводиться. пус конденсатора). На Фіг.1 - представлено пристрій для виконанПорівняння графіків показує дещо більші знаня способу, що складається з наступних вузлів і чення Кр.з. і відповідну продуктивність. Звідси видеталей. являється можливість апроксимації всіх показниПередбункер в який входять чаша передбунків, що входять в загальний коефіцієнт заповнення кера 1, два електровібратора 2, включених в проК одним коефіцієнтом Кр.з., при цьому продуктивтивофазі, донний вібратор 3, регульована заслінка ність збільшується на 10%. Немає практичної не4, що регулюється по висоті. обхідності визначення багатьох коефіцієнтів. Вібробункер БЗП включає чашу 5, світлозахиЕксперименти також показали менші в два расний фартук 6, два фотодатчика (в кожний з них зи коливання продуктивності за амплітудою в повходить освітлювач 7, захисне скло 8, окуляр 9, точному часі порівняно з представленими в роботі фотоелемент 10). [3, с. 114]. Вібропривод 11, пристрій вторинної орієнтації Пояснюється це кращими умовами захоплення 12, магазин 13, відсікач 14, лоток 15, вібролоток деталей робочим органом БЗП. 16, робоча зона верстата 17 (металообробного Верхні деталі при цьому створюють менший або складального ). статичний тиск на нижні деталі які якраз знахоКомплексний пульт керування системами 18. дяться в зоні захоплення, верхні деталі менше Деталі 19 (на фіг. не надані), що завантажуються в лишають можливості самозахоплення нижніх, при робочу зону. цьому зменшується енергетичні затрати. Датчики установлені по висоті один від одного В тих типах БЗП де чаша не являється циліндна віддалі, «а». Верхній на висоті Н mах і нижній на ричною (секторні, шиберні, барабанні, крючкові і висоті Hmin. Віддалі по висоті «а» розрахункові в т.п.) периметр чаші приводиться до умовного діаграницях Н/Д=0,2÷0,3. По горизонталі датчики метру. розміщують на віддалі «б», яка вибирається з Література: конструктивних міркувань (можливості розмірного 1. Повидайло В.А. Расчет и конструирование реального розміщення). вибрационных питателей. - М., К.: МАШГИЗ, 1962. У випадку використання різноманітних (БЗП) - с. 151. схема розміщення датчиків не змінюється. 2. Силин Р.И. Автоматизация загрузки оборуПриклад виконання способу на вище вказанодование в машиностроении. Учебное пособие. му пристрої. Визначають вищий Н max=Н/Д =0,3 і Хмельницький: ТУП, 2003. - с. 225. нижній Нmin=Н/Д =0,2 розрахункові рівні заванта3. Камышный Н.И. Автоматизация загрузки ження чаші 5 бункера (Фіг.1), установлюють відпостанков. М.. Машиностроение, 1977.- с. 288. 5 Комп’ютерна в ерстка А. Крулевський 21277 6 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of controlling the process of bunker loader bowl filling
Назва патенту російськоюСпособ управления процессом заполнения чаши бункерного загрузочного устройства
МПК / Мітки
МПК: B23Q 7/16, B65G 65/30
Мітки: бункерного, заповнення, процесом, керування, завантажувального, чаші, спосіб, пристрою
Код посилання
<a href="https://ua.patents.su/3-21277-sposib-keruvannya-procesom-zapovnennya-chashi-bunkernogo-zavantazhuvalnogo-pristroyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування процесом заповнення чаші бункерного завантажувального пристрою</a>
Ущільнювальний клапан завантажувального пристрою доменної печі
Номер патенту: 8436
Опубліковано: 30.09.1996
Автори: Зайка Володимир Яковлевич, Скорий Генадій Ілліч, Апостолов Володимир Гнатович, Пеклич Михайло Михайлович
МПК: C21B 7/18
Мітки: доменної, ущільнювальний, завантажувального, клапан, печі, пристрою
Формула / Реферат:
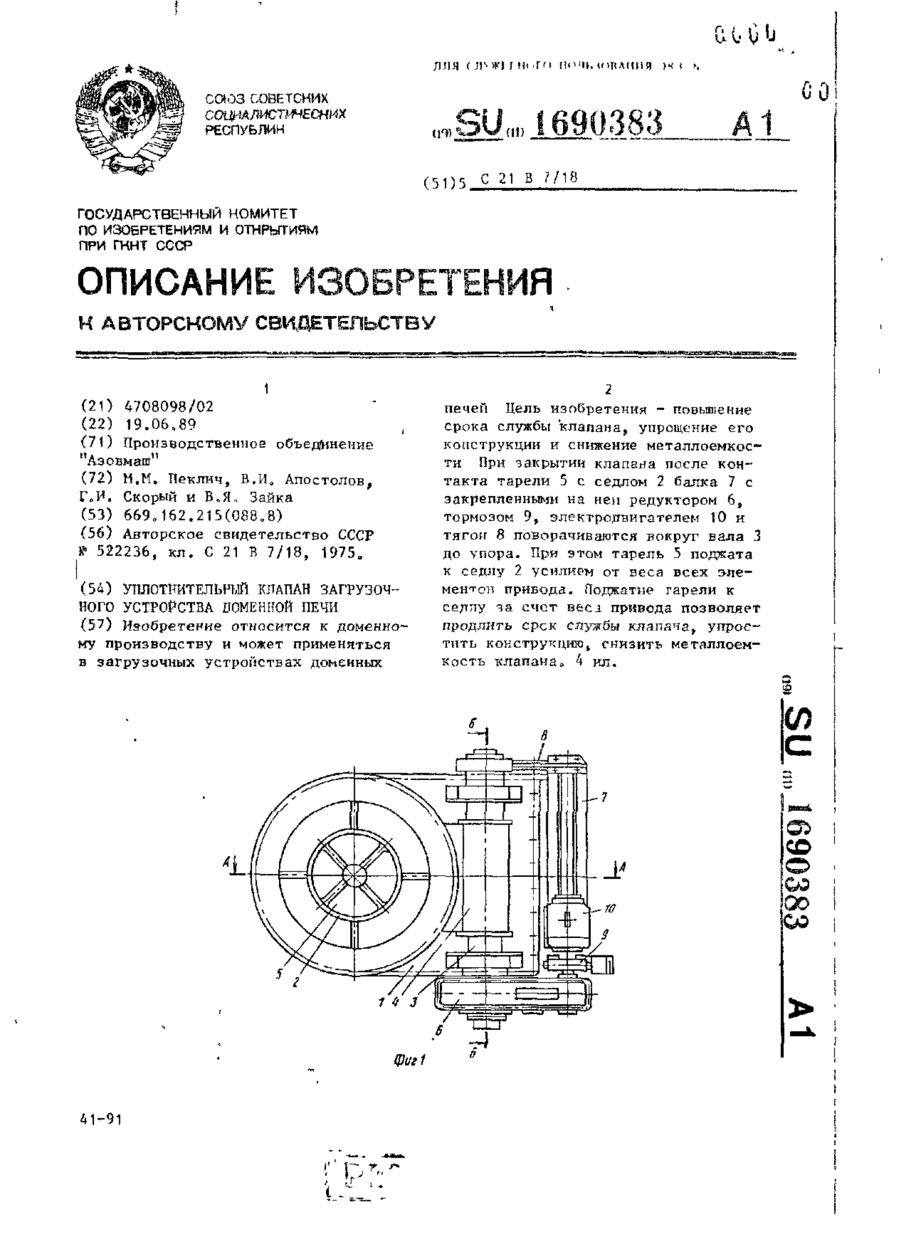
Уплотнительный клапан загрузочного устройства доменной печи, содержащий корпус, седло, тарель, рычаг тарели, закрепленный на валу, сообщенном с редуктором и электродвигателем, отличающийся тем, что, с целью повышения срока службы клапана, упрощения его конструкция в снижения металлоемкости, он снабжен установленной параллельно валу рычага с возможностью поворота вокруг негр балкой, жестко закрепленными на корпусе с возможностью...
Спосіб керування приводом руху лотка завантажувального пристрія шахтної печи
Номер патенту: 7055
Опубліковано: 31.03.1995
Автори: Гі Тіллен, Еміль Лонарді, Едуард Лежилль
МПК: C21B 7/20
Мітки: печі, пристрія, шахтної, завантажувального, льотка, керування, спосіб, приводом, руху
Формула / Реферат:
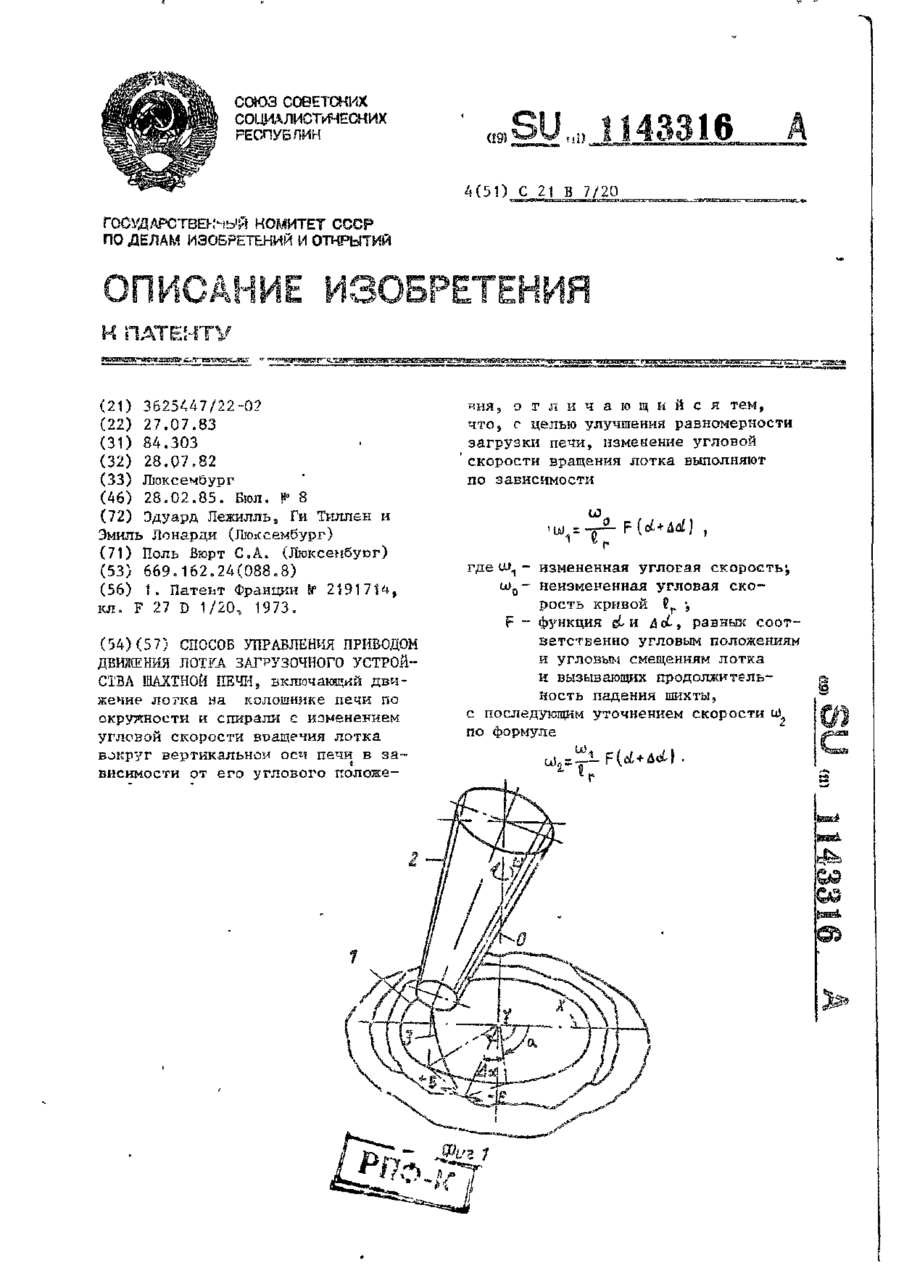
(57) Способ управления приводом движения лотка загрузочного устройства шахтной печи, включающий движение лотка на колошнике печи по окружности и спирали с изменением угловой скорости вращения лотка вокруг вертикальной оси печи в зависимости от его углового положения, отличающийся тем, что, с целью улучшения равномерности загрузки печи, изменение угловой скорости вращения лотка выполняют по зависимостигде w1 - измененная угловая...
Спосіб керування процесом електрошлакового переплаву
Номер патенту: 32008
Опубліковано: 15.12.2000
Автори: Адєєв Дмитро Вадимович, Комнацький Олександр Леонідович, Марченко Олександр Михайлович, Москалик Микола Вікторович, Дудник Михайло Іванович, Бондаренко Леонід Іванович, Гладкий Євген Дмитрович, Корнійчук В'ячеслав Анатолійович
Мітки: спосіб, керування, електрошлакового, процесом, переплаву
Текст:
...від завданої і властивості металу в цьому шарі (частині) зливка будуть відрізнятися від необхідних за технологією. Таким чином, спосіб керування процесом ЕШП, оснований на безпосередньому вимірюванні швидкості вилучення зливка з кристалізатора і порівнянні цієї швидкості із завданим значенням не є ефективним з точки зору забезпечення якості металу ЕШП. В основу винаходу поставлено задачу створення способу керування процесом ЕШП вільного...
Спосіб керування процесом пластичного деформування металів
Номер патенту: 7087
Опубліковано: 15.06.2005
Автори: Гладушин Віталій Васильович, Нечаєв Григорій Іванович, Губачева Лариса Олександрівна
МПК: G01N 11/08, B21D 28/00
Мітки: пластичного, керування, металів, деформування, процесом, спосіб
Формула / Реферат:
Спосіб керування процесом пластичного деформування металів, який полягає в тому, що визначають інтенсивність збільшення напруги та мінімальний рівень деформуючого зусилля для різних технологічних схем, який відрізняється тим, що досліджують кінцевий і поточний деформуючий стан при різних показниках деформації математичним моделюванням, обчислюють параметри напружено-деформованого стану і коефіцієнт контактного тертя через коефіцієнти...
Система змазування опор валів зубчатих сегментів установочного та підвісного механізмів розподільного лотку завантажувального пристрою доменної печі
Номер патенту: 8422
Опубліковано: 28.06.1996
Автори: Джованні Сіменті, Рене Мар
МПК: C21B 7/18
Мітки: сегментів, печі, змазування, механізмів, валів, доменної, зубчатих, пристрою, підвісного, опор, система, установочного, розподільного, завантажувального, льотку
Формула / Реферат:
1. Система смазки опор валов зубчатых сегментов установочного и подвесного механизмов распределительного лотка загрузочного устройства доменной печи, размещенная на подвижном корпусе распределителя и содержащая масленку, соединенную трубопроводом непрерывной подачи смазки под давлением со смазываемыми точками механизмов, отличающаяся тем, что, с целью повышения надежности смазки, система снабжена дополнительным подпружиненным масляным...
Попередній патент: Бункерний завантажувальний пристрій
Наступний патент: Склад апрету текстильного матеріалу для виготовлення головних уборів
Випадковий патент: Спосіб профілактики некаріозних уражень твердих тканин зубів