Підводний апарат
Номер патенту: 22027
Опубліковано: 10.04.2007
Автори: Галь Анатолій Феодосійович, Блінцов Володимир Степанович, Дубіна Марина Олександрівна, Штефирца Анна Іллівна, Бугаєнко Борис Андрійович
Формула / Реферат
Підводний апарат, що містить міцний корпус у вигляді порожнистих носової і кормової сфер, послідовно з'єднаних між собою перехідним люком і поміщених у легкий обтічний корпус, і/чи циліндрів зі сферичними кінцевими частинами, а також горизонтальний рушійно-стерновий комплекс, розташований у кормі підводного апарата, який відрізняється тим, що горизонтальний рушійно-стерновий комплекс виконано з одного чи декількох центральних маршових рушійних модулів, установлених віссю упору рушія по осі підводного апарата, і ряду периферійних допоміжних рушійних модулів з осями упору рушіїв, розміщеними симетрично навколо осі упору центрального маршового рушійного модуля, при цьому деякі периферійні допоміжні рушійні модулі з осями упору рушіїв, розміщеними симетрично навколо осі упору центрального маршового рушійного модуля, розташовано гребними гвинтами у бік носа підводного апарата.
Текст
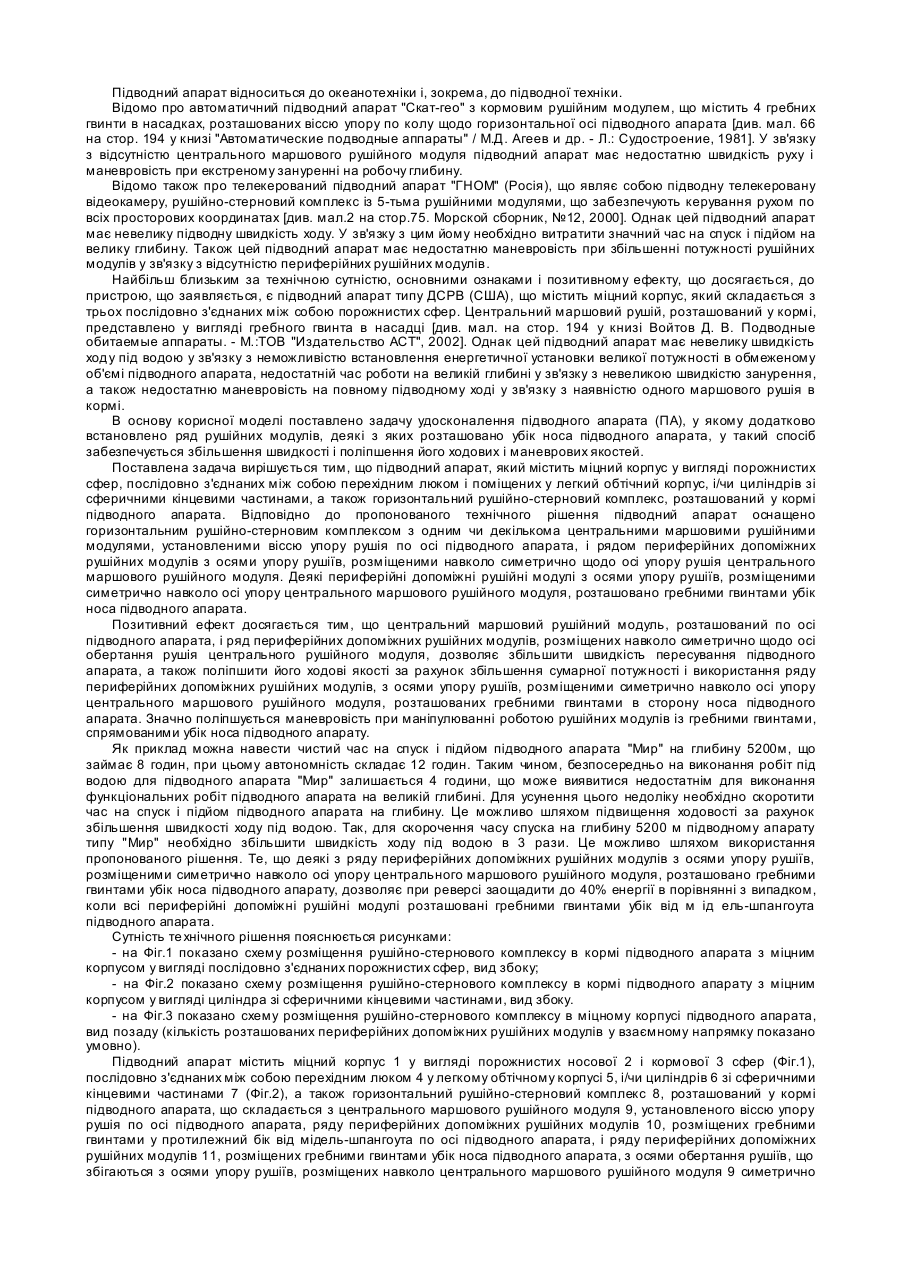
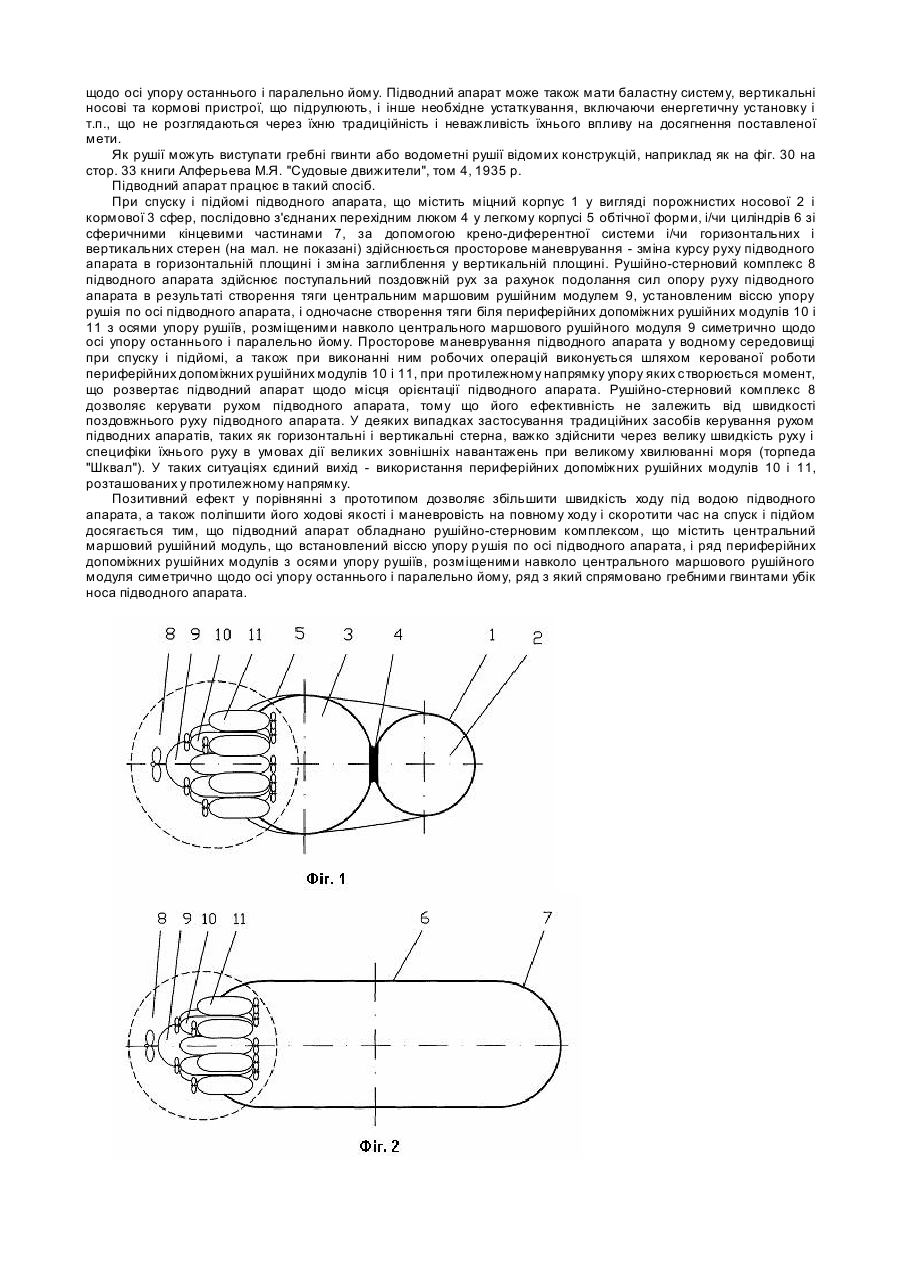
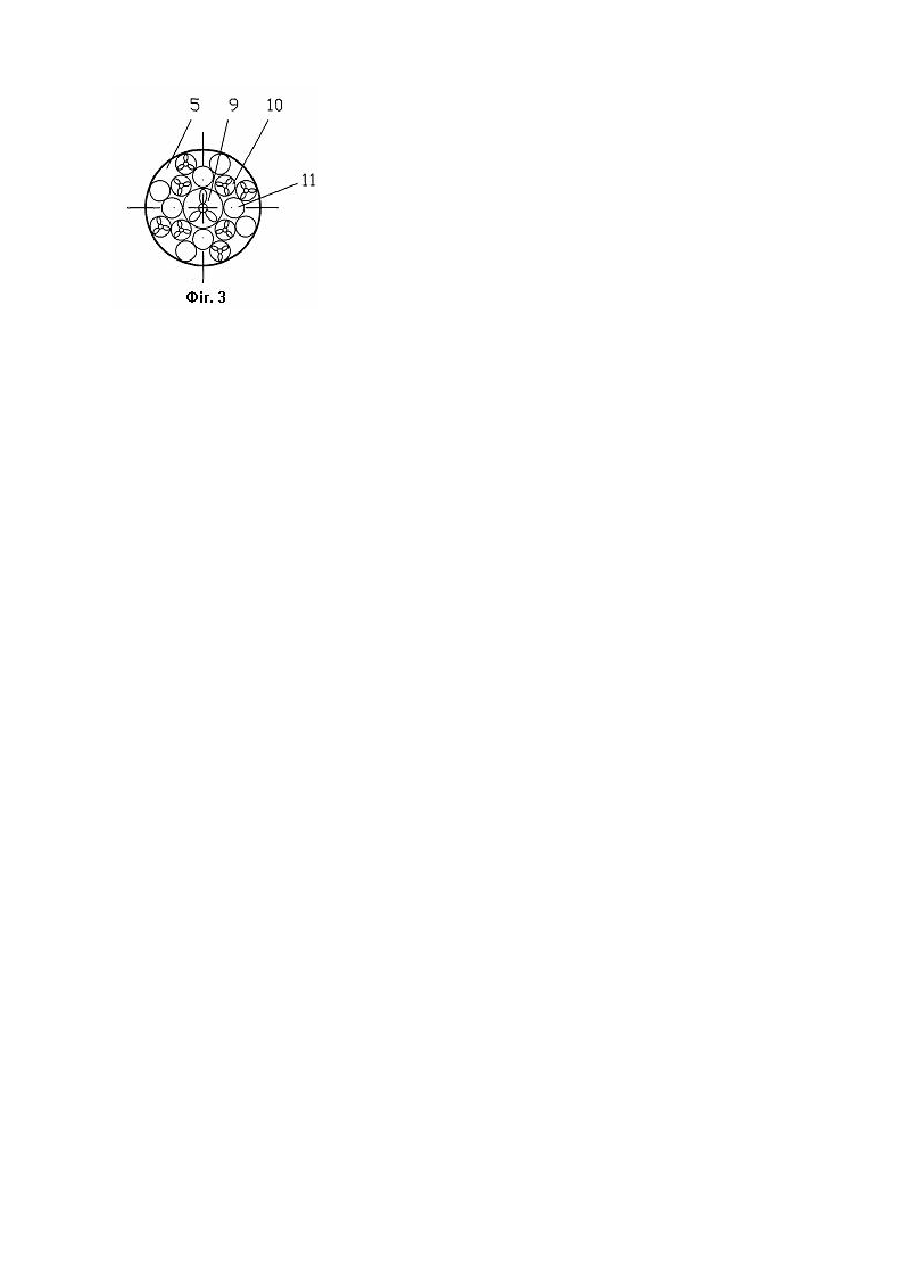
Підводний апарат відноситься до океанотехніки і, зокрема, до підводної техніки. Відомо про автоматичний підводний апарат "Скат-гео" з кормовим рушійним модулем, що містить 4 гребних гвинти в насадках, розташованих віссю упору по колу щодо горизонтальної осі підводного апарата [див. мал. 66 на стор. 194 у книзі "Автоматические подводные аппараты" / М.Д. Агеев и др. - Л.: Судостроение, 1981]. У зв'язку з відсутністю центрального маршового рушійного модуля підводний апарат має недостатню швидкість руху і маневровість при екстреному зануренні на робочу глибину. Відомо також про телекерований підводний апарат "ГНОМ" (Росія), що являє собою підводну телекеровану відеокамеру, рушійно-стерновий комплекс із 5-тьма рушійними модулями, що забезпечують керування рухом по всіх просторових координатах [див. мал.2 на стор.75. Морской сборник, №12, 2000]. Однак цей підводний апарат має невелику підводну швидкість ходу. У зв'язку з цим йому необхідно витратити значний час на спуск і підйом на велику глибину. Також цей підводний апарат має недостатню маневровість при збільшенні потужності рушійних модулів у зв'язку з відсутністю периферійних рушійних модулів. Найбільш близьким за технічною сутністю, основними ознаками і позитивному ефекту, що досягається, до пристрою, що заявляється, є підводний апарат типу ДСРВ (США), що містить міцний корпус, який складається з трьох послідовно з'єднаних між собою порожнистих сфер. Центральний маршовий рушій, розташований у кормі, представлено у вигляді гребного гвинта в насадці [див. мал. на стор. 194 у книзі Войтов Д. В. Подводные обитаемые аппараты. - М.:ТОВ "Издательство ACT", 2002]. Однак цей підводний апарат має невелику швидкість ходу під водою у зв'язку з неможливістю встановлення енергетичної установки великої потужності в обмеженому об'ємі підводного апарата, недостатній час роботи на великій глибині у зв'язку з невеликою швидкістю занурення, а також недостатню маневровість на повному підводному ході у зв'язку з наявністю одного маршового рушія в кормі. В основу корисної моделі поставлено задачу удосконалення підводного апарата (ПА), у якому додатково встановлено ряд рушійних модулів, деякі з яких розташовано убік носа підводного апарата, у такий спосіб забезпечується збільшення швидкості і поліпшення його ходових і маневрових якостей. Поставлена задача вирішується тим, що підводний апарат, який містить міцний корпус у вигляді порожнистих сфер, послідовно з'єднаних між собою перехідним люком і поміщених у легкий обтічний корпус, і/чи циліндрів зі сферичними кінцевими частинами, а також горизонтальний рушійно-стерновий комплекс, розташований у кормі підводного апарата. Відповідно до пропонованого технічного рішення підводний апарат оснащено горизонтальним рушійно-стерновим комплексом з одним чи декількома центральними маршовими рушійними модулями, установленими віссю упору рушія по осі підводного апарата, і рядом периферійних допоміжних рушійних модулів з осями упору рушіїв, розміщеними навколо симетрично щодо осі упору рушія центрального маршового рушійного модуля. Деякі периферійні допоміжні рушійні модулі з осями упору рушіїв, розміщеними симетрично навколо осі упору центрального маршового рушійного модуля, розташовано гребними гвинтами убік носа підводного апарата. Позитивний ефект досягається тим, що центральний маршовий рушійний модуль, розташований по осі підводного апарата, і ряд периферійних допоміжних рушійних модулів, розміщених навколо симетрично щодо осі обертання рушія центрального рушійного модуля, дозволяє збільшити швидкість пересування підводного апарата, а також поліпшити його ходові якості за рахунок збільшення сумарної потужності і використання ряду периферійних допоміжних рушійних модулів, з осями упору рушіїв, розміщеними симетрично навколо осі упору центрального маршового рушійного модуля, розташованих гребними гвинтами в сторону носа підводного апарата. Значно поліпшується маневровість при маніпулюванні роботою рушійних модулів із гребними гвинтами, спрямованими убік носа підводного апарату. Як приклад можна навести чистий час на спуск і підйом підводного апарата "Мир" на глибину 5200м, що займає 8 годин, при цьому автономність складає 12 годин. Таким чином, безпосередньо на виконання робіт під водою для підводного апарата "Мир" залишається 4 години, що може виявитися недостатнім для виконання функціональних робіт підводного апарата на великій глибині. Для усунення цього недоліку необхідно скоротити час на спуск і підйом підводного апарата на глибину. Це можливо шляхом підвищення ходовості за рахунок збільшення швидкості ходу під водою. Так, для скорочення часу спуска на глибину 5200 м підводному апарату типу "Мир" необхідно збільшити швидкість ходу під водою в 3 рази. Це можливо шляхом використання пропонованого рішення. Те, що деякі з ряду периферійних допоміжних рушійних модулів з осями упору рушіїв, розміщеними симетрично навколо осі упору центрального маршового рушійного модуля, розташовано гребними гвинтами убік носа підводного апарату, дозволяє при реверсі заощадити до 40% енергії в порівнянні з випадком, коли всі периферійні допоміжні рушійні модулі розташовані гребними гвинтами убік від м ід ель-шпангоута підводного апарата. Сутність те хнічного рішення пояснюється рисунками: - на Фіг.1 показано схему розміщення рушійно-стернового комплексу в кормі підводного апарата з міцним корпусом у вигляді послідовно з'єднаних порожнистих сфер, вид збоку; - на Фіг.2 показано схему розміщення рушійно-стернового комплексу в кормі підводного апарату з міцним корпусом у вигляді циліндра зі сферичними кінцевими частинами, вид збоку. - на Фіг.3 показано схему розміщення рушійно-стернового комплексу в міцному корпусі підводного апарата, вид позаду (кількість розташованих периферійних допоміжних рушійних модулів у взаємному напрямку показано умовно). Підводний апарат містить міцний корпус 1 у вигляді порожнистих носової 2 і кормової 3 сфер (Фіг.1), послідовно з'єднаних між собою перехідним люком 4 у легкому обтічному корпусі 5, і/чи циліндрів 6 зі сферичними кінцевими частинами 7 (Фіг.2), а також горизонтальний рушійно-стерновий комплекс 8, розташований у кормі підводного апарата, що складається з центрального маршового рушійного модуля 9, установленого віссю упору рушія по осі підводного апарата, ряду периферійних допоміжних рушійних модулів 10, розміщених гребними гвинтами у протилежний бік від мідель-шпангоута по осі підводного апарата, і ряду периферійних допоміжних рушійних модулів 11, розміщених гребними гвинтами убік носа підводного апарата, з осями обертання рушіїв, що збігаються з осями упору рушіїв, розміщених навколо центрального маршового рушійного модуля 9 симетрично щодо осі упору останнього і паралельно йому. Підводний апарат може також мати баластну систему, вертикальні носові та кормові пристрої, що підрулюють, і інше необхідне устаткування, включаючи енергетичну установку і т.п., що не розглядаються через їхню традиційність і неважливість їхнього впливу на досягнення поставленої мети. Як рушії можуть виступати гребні гвинти або водометні рушії відомих конструкцій, наприклад як на фіг. 30 на стор. 33 книги Алферьева М.Я. "Судовые движители", том 4, 1935 р. Підводний апарат працює в такий спосіб. При спуску і підйомі підводного апарата, що містить міцний корпус 1 у вигляді порожнистих носової 2 і кормової 3 сфер, послідовно з'єднаних перехідним люком 4 у легкому корпусі 5 обтічної форми, і/чи циліндрів 6 зі сферичними кінцевими частинами 7, за допомогою крено-диферентної системи і/чи горизонтальних і вертикальних стерен (на мал. не показані) здійснюється просторове маневрування - зміна курсу руху підводного апарата в горизонтальній площині і зміна заглиблення у вертикальній площині. Рушійно-стерновий комплекс 8 підводного апарата здійснює поступальний поздовжній рух за рахунок подолання сил опору руху підводного апарата в результаті створення тяги центральним маршовим рушійним модулем 9, установленим віссю упору рушія по осі підводного апарата, і одночасне створення тяги біля периферійних допоміжних рушійних модулів 10 і 11 з осями упору рушіїв, розміщеними навколо центрального маршового рушійного модуля 9 симетрично щодо осі упору останнього і паралельно йому. Просторове маневрування підводного апарата у водному середовищі при спуску і підйомі, а також при виконанні ним робочих операцій виконується шляхом керованої роботи периферійних допоміжних рушійних модулів 10 і 11, при протилежному напрямку упору яких створюється момент, що розвертає підводний апарат щодо місця орієнтації підводного апарата. Рушійно-стерновий комплекс 8 дозволяє керувати рухом підводного апарата, тому що його ефективність не залежить від швидкості поздовжнього руху підводного апарата. У деяких випадках застосування традиційних засобів керування рухом підводних апаратів, таких як горизонтальні і вертикальні стерна, важко здійснити через велику швидкість руху і специфіки їхнього руху в умовах дії великих зовнішніх навантажень при великому хвилюванні моря (торпеда "Шквал"). У таких ситуаціях єдиний вихід - використання периферійних допоміжних рушійних модулів 10 і 11, розташованих у протилежному напрямку. Позитивний ефект у порівнянні з прототипом дозволяє збільшити швидкість ходу під водою підводного апарата, а також поліпшити його ходові якості і маневровість на повному ходу і скоротити час на спуск і підйом досягається тим, що підводний апарат обладнано рушійно-стерновим комплексом, що містить центральний маршовий рушійний модуль, що встановлений віссю упору р ушія по осі підводного апарата, і ряд периферійних допоміжних рушійних модулів з осями упору рушіїв, розміщеними навколо центрального маршового рушійного модуля симетрично щодо осі упору останнього і паралельно йому, ряд з який спрямовано гребними гвинтами убік носа підводного апарата.
ДивитисяДодаткова інформація
Назва патенту англійськоюUnderwater vehicle
Автори англійськоюBlintsov Volodymyr Stepanovych, Buhaienko Borys Andriiovych, Hal Anatolii Feodosiiovych, Dubina Maryna Oleksandrivna, Shtefyrtsa Anna Illivna
Назва патенту російськоюПодводный аппарат
Автори російськоюБлинцов Владимир Степанович, Бугаенко Борис Андреевич, Галь Анатолий Феодосьевич, Дубина Марина Александровна, Штефирца Анна Ильинична
МПК / Мітки
МПК: B63G 8/00
Код посилання
<a href="https://ua.patents.su/3-22027-pidvodnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Підводний апарат</a>
Підводний апарат
Номер патенту: 20208
Опубліковано: 15.01.2007
Автори: Штефирца Анна Іллівна, Дубіна Марина Олександрівна, Галь Анатолій Феодосійович
МПК: B63G 8/00
Формула / Реферат:
Підводний апарат, що містить міцний корпус у вигляді порожнистих носової й кормової сфер, послідовно з'єднаних між собою перехідним люком і поміщених у легкий обтічний корпус, і/або циліндрів зі сферичними кінцевими частинами, а також горизонтальний рушійно-стерновий комплекс, розташований у кормі підводного апарата, який відрізняється тим, що горизонтальний рушійно-стерновий комплекс виконано з одного або декількох центральних маршових...
Підводний апарат з плавцевим рушієм

Номер патенту: 49237
Опубліковано: 16.09.2002
Автори: Поліщук Сергій Володимирович, Бабенко Віктор Віталійович
Мітки: апарат, плавцевим, підводний, рушієм
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни поворотного типу, який відрізняється тим, що в корпусі апарата виконані виїмки, в яких встановлені пластини з можливістю їх повороту навколо поздовжньої осі корпусу апарата, а в тілі головного плавцевого рушія додатково розміщено електродвигун, з’єднаний кронштейном з додатковим плавцевим рушієм з можливістю його коливання у площині,...
Рятувальний підводний апарат

Номер патенту: 16642
Опубліковано: 15.08.2006
Автори: Дубіна Марина Олександрівна, Галь Анатолій Феодосійович
МПК: B63C 9/00, B63G 8/00, B63B 3/13
Мітки: підводний, апарат, рятувальний
Формула / Реферат:
1. Рятувальний підводний апарат, що містить міцний корпус у вигляді послідовно сполучених порожнистих сфер, поміщених в легкий корпус, а одна з сфер забезпечена основною камерою присоса, розташованою в нижній частині сфери, який відрізняється тим, що забезпечений додатковими бічними камерами присоса.2. Рятувальний підводний апарат за п. 1, який відрізняється тим, що основна камера присоса розташована в центральній сфері міцного...
Підводний апарат

Номер патенту: 20209
Опубліковано: 15.01.2007
Автори: Блінцов Володимир Степанович, Дубіна Марина Олександрівна, Бугаєнко Борис Андрійович, Галь Анатолій Феодосійович
МПК: B63G 8/00
Формула / Реферат:
Підводний апарат, який містить міцний і легкий корпуси, раму, головні баластні цистерни у легкому корпусі, рушійно-рульовий комплекс, розміщений у корпусі підводного апарата, має рушії і їх приводи, енергетичну установку, що зв'язана з приводами рушіїв, систему керування у міцному корпусі, телекамери, світильники, що розміщені у носовій частині підводного апарата на рамі, маніпулятори у нижній частині легкого корпусу, аварійно-сигнальний буй,...
Підводний апарат-транспортувальник
Номер патенту: 20094
Опубліковано: 15.01.2007
Автори: Андрейчикова Ганна Юріївна, Дубіна Марина Олександрівна, Бугаєнко Борис Андрійович, Галь Анатолій Федосійович
МПК: B63G 8/00
Мітки: підводний, апарат-транспортувальник
Формула / Реферат:
Підводний апарат-транспортувальник, який містить міцний корпус, що складається з носового, центрального і кормового відсіків у вигляді послідовно з'єднаних порожнистих сфер і/або порожнистих циліндрів із сферичними кінцевими частинами, поміщених в легкий корпус, енергетичну установку в кормовому відсіку, рушійно-рульовий комплекс з системою керування, цистерни головного баласту, багатоступеневий маніпулятор, балони повітря високого тиску,...
Попередній патент: Нетканинний сорбційно-фільтруючий матеріал
Наступний патент: Пристрій для заміни засувки
Випадковий патент: Пристрій для коагуляційного гемостазу