Підводний апарат
Номер патенту: 20209
Опубліковано: 15.01.2007
Автори: Бугаєнко Борис Андрійович, Блінцов Володимир Степанович, Галь Анатолій Феодосійович, Дубіна Марина Олександрівна

Формула / Реферат
Підводний апарат, який містить міцний і легкий корпуси, раму, головні баластні цистерни у легкому корпусі, рушійно-рульовий комплекс, розміщений у корпусі підводного апарата, має рушії і їх приводи, енергетичну установку, що зв'язана з приводами рушіїв, систему керування у міцному корпусі, телекамери, світильники, що розміщені у носовій частині підводного апарата на рамі, маніпулятори у нижній частині легкого корпусу, аварійно-сигнальний буй, аварійний твердий баласт розміщені у легкому корпусі, який відрізняється тим, що забезпечений вантажозахватним пристроєм у вигляді грейфера з лапами, розміщеними на осі, сполученій через підшипники з рамою і встановленій в нижній її передній частині, важелями, сполученими з понтонами, розділеними пружною мембраною на верхню і нижню порожнини, причому у верхній порожнині понтонів розміщені елементи позитивної плавучості у вигляді порожнистих керамічних або скляних куль, а нижні порожнини понтонів сполучені через кінгстони із забортною водою і гнучкими шлангами через ресивер - між собою, при цьому верхні порожнини понтонів зв'язані гнучкими шлангами з верхньою порожниною контейнера, що містить елементи позитивної плавучості, причому контейнер має пружну мембрану, а нижня порожнина через насос і кінгстон сполучена із забортною водою, причому гнучкі шланги забезпечені керованими клапанами.
Текст
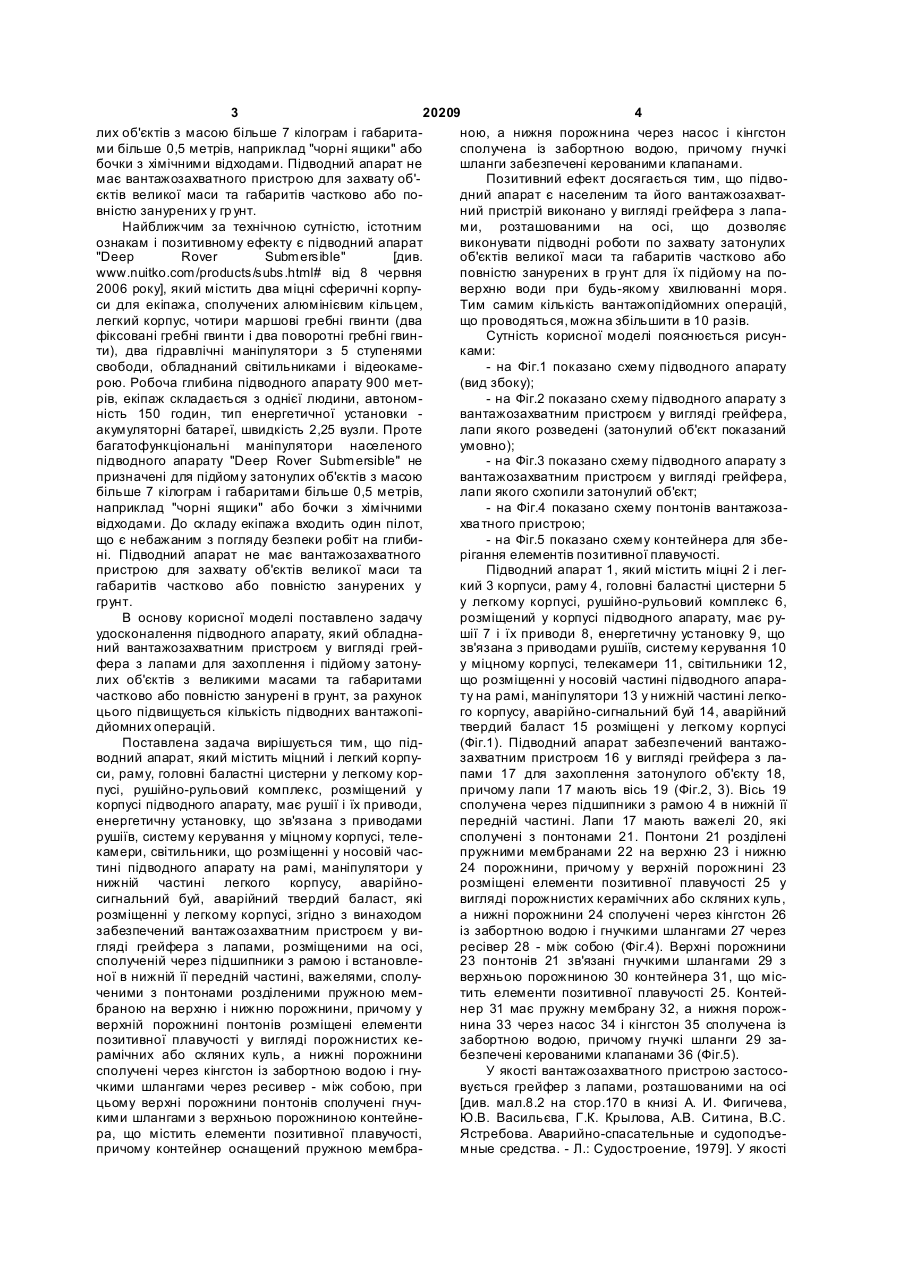
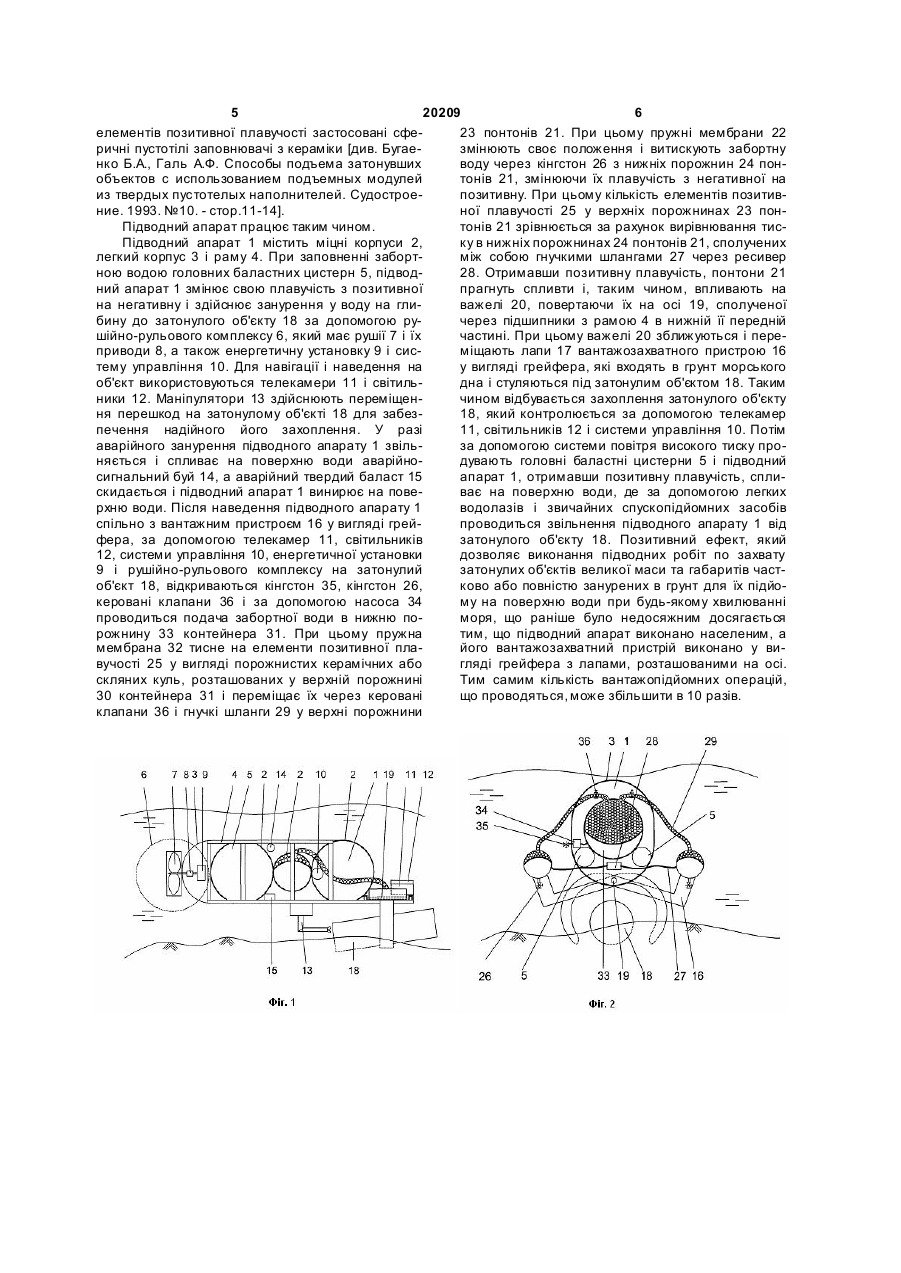
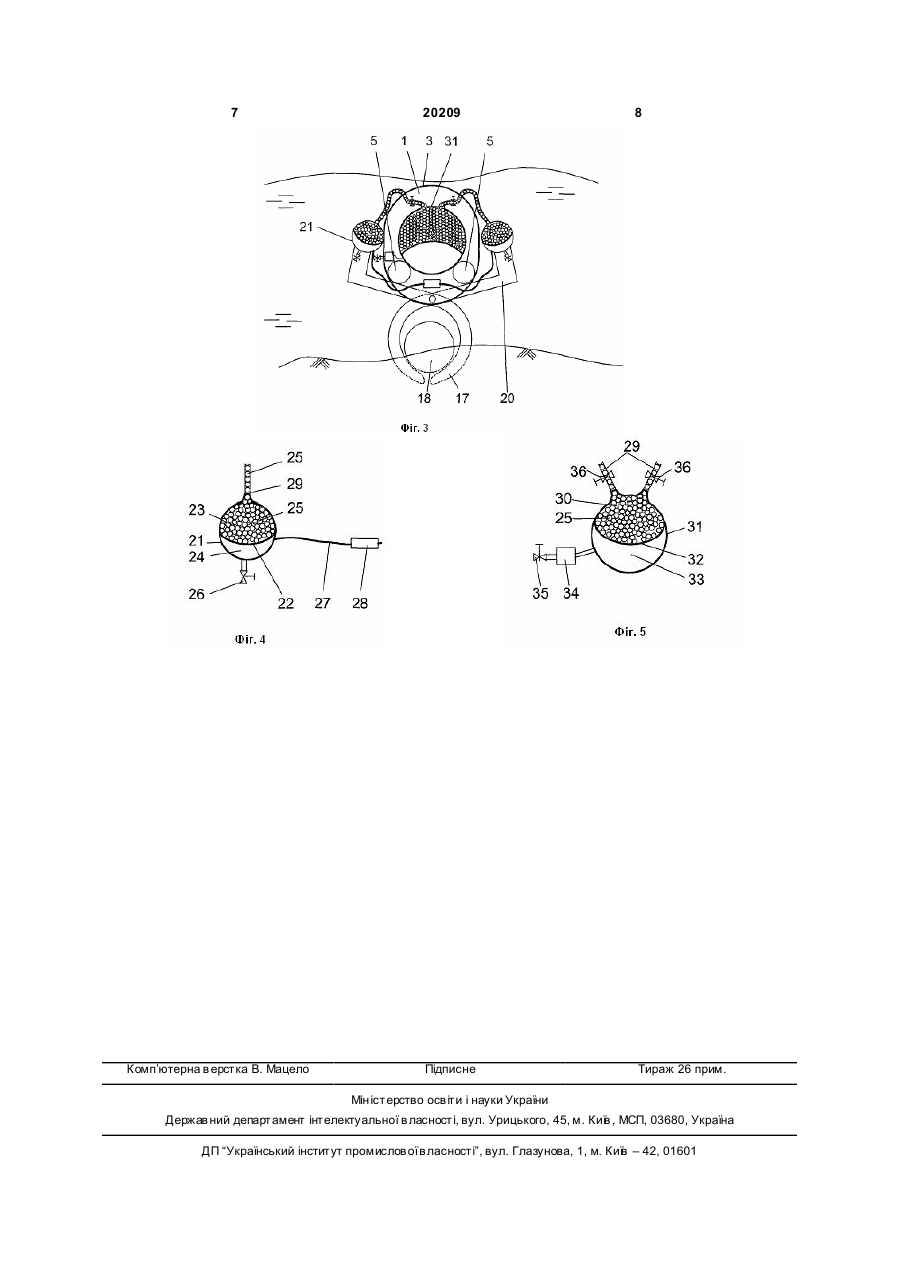
Підводний апарат, який містить міцний і легкий корпуси, раму, головні баластні цистерни у легкому корпусі, рушійно-рульовий комплекс, розміщений у корпусі підводного апарата, має рушії і їх приводи, енергетичну установку, що зв'язана з приводами рушіїв, систему керування у міцному корпусі, телекамери, світильники, що розміщені у носовій частині підводного апарата на рамі, маніпулятори у нижній частині легкого корпусу, аварійно-сигнальний буй, аварійний твердий баласт 3 20209 4 лих об'єктів з масою більше 7 кілограм і габаританою, а нижня порожнина через насос і кінгстон ми більше 0,5 метрів, наприклад "чорні ящики" або сполучена із забортною водою, причому гнучкі бочки з хімічними відходами. Підводний апарат не шланги забезпечені керованими клапанами. має вантажозахватного пристрою для захвату об'Позитивний ефект досягається тим, що підвоєктів великої маси та габаритів частково або подний апарат є населеним та його вантажозахватвністю занурених у гр унт. ний пристрій виконано у вигляді грейфера з лапаНайближчим за технічною сутністю, істотним ми, розташованими на осі, що дозволяє ознакам і позитивному ефекту є підводний апарат виконувати підводні роботи по захвату затонулих "Deep Rover Submersible" [див. об'єктів великої маси та габаритів частково або www.nuitko.com/products/subs.html# від 8 червня повністю занурених в гр унт для їх підйому на по2006 року], який містить два міцні сферичні корпуверхню води при будь-якому хвилюванні моря. си для екіпажа, сполучених алюмінієвим кільцем, Тим самим кількість вантажопідйомних операцій, легкий корпус, чотири маршові гребні гвинти (два що проводяться, можна збільшити в 10 разів. фіксовані гребні гвинти і два поворотні гребні гвинСутність корисної моделі пояснюється рисунти), два гідравлічні маніпулятори з 5 ступенями ками: свободи, обладнаний світильниками і відеокаме- на Фіг.1 показано схему підводного апарату рою. Робоча глибина підводного апарату 900 мет(вид збоку); рів, екіпаж складається з однієї людини, автоном- на Фіг.2 показано схему підводного апарату з ність 150 годин, тип енергетичної установки вантажозахватним пристроєм у вигляді грейфера, акумуляторні батареї, швидкість 2,25 вузли. Проте лапи якого розведені (затонулий об'єкт показаний багатофункціональні маніпулятори населеного умовно); підводного апарату "Deep Rover Submersible" не - на Фіг.3 показано схему підводного апарату з призначені для підйому затонулих об'єктів з масою вантажозахватним пристроєм у вигляді грейфера, більше 7 кілограм і габаритами більше 0,5 метрів, лапи якого схопили затонулий об'єкт; наприклад "чорні ящики" або бочки з хімічними - на Фіг.4 показано схему понтонів вантажозавідходами. До складу екіпажа входить один пілот, хва тного пристрою; що є небажаним з погляду безпеки робіт на глиби- на Фіг.5 показано схему контейнера для збені. Підводний апарат не має вантажозахватного рігання елементів позитивної плавучості. пристрою для захвату об'єктів великої маси та Підводний апарат 1, який містить міцні 2 і леггабаритів частково або повністю занурених у кий 3 корпуси, раму 4, головні баластні цистерни 5 грунт. у легкому корпусі, рушійно-рульовий комплекс 6, В основу корисної моделі поставлено задачу розміщений у корпусі підводного апарату, має руудосконалення підводного апарату, який обладнашії 7 і їх приводи 8, енергетичну установку 9, що ний вантажозахватним пристроєм у вигляді грейзв'язана з приводами рушіїв, систему керування 10 фера з лапами для захоплення і підйому затонуу міцному корпусі, телекамери 11, світильники 12, лих об'єктів з великими масами та габаритами що розміщенні у носовій частині підводного апарачастково або повністю занурені в грунт, за рахунок ту на рамі, маніпулятори 13 у нижній частині легкоцього підвищується кількість підводних вантажопіго корпусу, аварійно-сигнальний буй 14, аварійний дйомних операцій. твердий баласт 15 розміщені у легкому корпусі Поставлена задача вирішується тим, що під(Фіг.1). Підводний апарат забезпечений вантажоводний апарат, який містить міцний і легкий корпузахватним пристроєм 16 у вигляді грейфера з ласи, раму, головні баластні цистерни у легкому корпами 17 для захоплення затонулого об'єкту 18, пусі, рушійно-рульовий комплекс, розміщений у причому лапи 17 мають вісь 19 (Фіг.2, 3). Вісь 19 корпусі підводного апарату, має рушії і їх приводи, сполучена через підшипники з рамою 4 в нижній її енергетичну установку, що зв'язана з приводами передній частині. Лапи 17 мають важелі 20, які рушіїв, систему керування у міцному корпусі, телесполучені з понтонами 21. Понтони 21 розділені камери, світильники, що розміщенні у носовій часпружними мембранами 22 на верхню 23 і нижню тині підводного апарату на рамі, маніпулятори у 24 порожнини, причому у верхній порожнині 23 нижній частині легкого корпусу, аварійнорозміщені елементи позитивної плавучості 25 у сигнальний буй, аварійний твердий баласт, які вигляді порожнистих керамічних або скляних куль, розміщенні у легкому корпусі, згідно з винаходом а нижні порожнини 24 сполучені через кінгстон 26 забезпечений вантажозахватним пристроєм у виіз забортною водою і гнучкими шлангами 27 через гляді грейфера з лапами, розміщеними на осі, ресівер 28 - між собою (Фіг.4). Верхні порожнини сполученій через підшипники з рамою і встановле23 понтонів 21 зв'язані гнучкими шлангами 29 з ної в нижній її передній частині, важелями, сполуверхньою порожниною 30 контейнера 31, що місченими з понтонами розділеними пружною мемтить елементи позитивної плавучості 25. Контейбраною на верхню і нижню порожнини, причому у нер 31 має пружну мембрану 32, а нижня порожверхній порожнині понтонів розміщені елементи нина 33 через насос 34 і кінгстон 35 сполучена із позитивної плавучості у вигляді порожнистих кезабортною водою, причому гнучкі шланги 29 зарамічних або скляних куль, а нижні порожнини безпечені керованими клапанами 36 (Фіг.5). сполучені через кінгстон із забортною водою і гнуУ якості вантажозахватного пристрою застосочкими шлангами через ресивер - між собою, при вується грейфер з лапами, розташованими на осі цьому верхні порожнини понтонів сполучені гнуч[див. мал.8.2 на стор.170 в книзі А. И. Фигичева, кими шлангами з верхньою порожниною контейнеЮ.В. Васильєва, Г.К. Крылова, А.В. Ситина, B.C. ра, що містить елементи позитивної плавучості, Ястребова. Аварийно-спасательные и судоподъепричому контейнер оснащений пружною мембрамные средства. - Л.: Судостроение, 1979]. У якості 5 20209 6 елементів позитивної плавучості застосовані сфе23 понтонів 21. При цьому пружні мембрани 22 ричні пустотілі заповнювачі з кераміки [див. Бугаезмінюють своє положення і витискують забортну нко Б.А., Галь А.Ф. Способы подъема затонувших воду через кінгстон 26 з нижніх порожнин 24 понобъектов с использованием подъемных модулей тонів 21, змінюючи їх плавучість з негативної на из твердых пустотелых наполнителей. Судостроепозитивну. При цьому кількість елементів позитивние. 1993. №10. - стор.11-14]. ної плавучості 25 у верхніх порожнинах 23 понПідводний апарат працює таким чином. тонів 21 зрівнюється за рахунок вирівнювання тисПідводний апарат 1 містить міцні корпуси 2, ку в нижніх порожнинах 24 понтонів 21, сполучених легкий корпус 3 і раму 4. При заповненні забортміж собою гнучкими шлангами 27 через ресивер ною водою головних баластних цистерн 5, підвод28. Отримавши позитивну плавучість, понтони 21 ний апарат 1 змінює свою плавучість з позитивної прагнуть спливти і, таким чином, впливають на на негативну і здійснює занурення у воду на гливажелі 20, повертаючи їх на осі 19, сполученої бину до затонулого об'єкту 18 за допомогою ручерез підшипники з рамою 4 в нижній її передній шійно-рульового комплексу 6, який має рушії 7 і їх частині. При цьому важелі 20 зближуються і переприводи 8, а також енергетичну установку 9 і сисміщають лапи 17 вантажозахватного пристрою 16 тему управління 10. Для навігації і наведення на у вигляді грейфера, які входять в грунт морського об'єкт використовуються телекамери 11 і світильдна і стуляються під затонулим об'єктом 18. Таким ники 12. Маніпулятори 13 здійснюють переміщенчином відбувається захоплення затонулого об'єкту ня перешкод на затонулому об'єкті 18 для забез18, який контролюється за допомогою телекамер печення надійного його захоплення. У разі 11, світильників 12 і системи управління 10. Потім аварійного занурення підводного апарату 1 звільза допомогою системи повітря високого тиску проняється і спливає на поверхню води аварійнодувають головні баластні цистерни 5 і підводний сигнальний буй 14, а аварійний твердий баласт 15 апарат 1, отримавши позитивну плавучість, сплискидається і підводний апарат 1 винирює на повеває на поверхню води, де за допомогою легких рхню води. Після наведення підводного апарату 1 водолазів і звичайних спускопідйомних засобів спільно з вантажним пристроєм 16 у вигляді грейпроводиться звільнення підводного апарату 1 від фера, за допомогою телекамер 11, світильників затонулого об'єкту 18. Позитивний ефект, який 12, системи управління 10, енергетичної установки дозволяє виконання підводних робіт по захвату 9 і рушійно-рульового комплексу на затонулий затонулих об'єктів великої маси та габаритів частоб'єкт 18, відкриваються кінгстон 35, кінгстон 26, ково або повністю занурених в грунт для їх підйокеровані клапани 36 і за допомогою насоса 34 му на поверхню води при будь-якому хвилюванні проводиться подача забортної води в нижню поморя, що раніше було недосяжним досягається рожнину 33 контейнера 31. При цьому пружна тим, що підводний апарат виконано населеним, а мембрана 32 тисне на елементи позитивної плайого вантажозахватний пристрій виконано у вивучості 25 у вигляді порожнистих керамічних або гляді грейфера з лапами, розташованими на осі. скляних куль, розташованих у верхній порожнині Тим самим кількість вантажопідйомних операцій, 30 контейнера 31 і переміщає їх через керовані що проводяться, може збільшити в 10 разів. клапани 36 і гнучкі шланги 29 у верхні порожнини 7 Комп’ютерна в ерстка В. Мацело 20209 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUnderwater apparatus
Автори англійськоюBlintsov Volodymyr Stepanovych, Buhaienko Borys Andriiovych, Hal Anatolii Feodosiiovych, Dubina Maryna Oleksandrivna
Назва патенту російськоюПодводный аппарат
Автори російськоюБлинцов Владимир Степанович, Бугаенко Борис Андреевич, Галь Анатолий Феодосьевич, Дубина Марина Александровна
МПК / Мітки
МПК: B63G 8/00
Код посилання
<a href="https://ua.patents.su/4-20209-pidvodnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Підводний апарат</a>
Рятувальний підводний апарат

Номер патенту: 16642
Опубліковано: 15.08.2006
Автори: Галь Анатолій Феодосійович, Дубіна Марина Олександрівна
МПК: B63B 3/13, B63G 8/00, B63C 9/00
Мітки: рятувальний, підводний, апарат
Формула / Реферат:
1. Рятувальний підводний апарат, що містить міцний корпус у вигляді послідовно сполучених порожнистих сфер, поміщених в легкий корпус, а одна з сфер забезпечена основною камерою присоса, розташованою в нижній частині сфери, який відрізняється тим, що забезпечений додатковими бічними камерами присоса.2. Рятувальний підводний апарат за п. 1, який відрізняється тим, що основна камера присоса розташована в центральній сфері міцного...
Підводний апарат з плавцевим рушієм

Номер патенту: 49237
Опубліковано: 16.09.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
Мітки: підводний, апарат, рушієм, плавцевим
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни поворотного типу, який відрізняється тим, що в корпусі апарата виконані виїмки, в яких встановлені пластини з можливістю їх повороту навколо поздовжньої осі корпусу апарата, а в тілі головного плавцевого рушія додатково розміщено електродвигун, з’єднаний кронштейном з додатковим плавцевим рушієм з можливістю його коливання у площині,...
Підводний апарат з плавцевим рушієм
Номер патенту: 41724
Опубліковано: 17.09.2001
Автори: Поліщук Сергій Володимирович, Майстер Валентин Іванович, Бабенко Віктор Віталійович
Мітки: плавцевим, рушієм, апарат, підводний
Формула / Реферат:
Підводний апарат з плавцевим рушієм, який містить крило, на поверхні якого є переміжні зубці та западини, який відрізняється тим, що в корпусі апарата та плавцевого рушія встановлені соленоїди, підпружинені сердечники яких жорстко з'єднані з циліндром, на поверхні якого додатково розміщені переміжні зубці та западини, і коробом, які мають можливість висування відповідно з корпусу апарата та плавцевого рушія.
Підводний апарат з плавцевим рушієм
Номер патенту: 41616
Опубліковано: 17.09.2001
Автори: Коробов Віталій Ілліч, Мороз Володимир Василійович, Поліщук Сергій Володимирович, Мартиненко Іван Іванович, Бабенко Віктор Віталійович
Мітки: підводний, апарат, плавцевим, рушієм
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни, який відрізняється тим, що на вихідному валу електродвигуна, розміщеного в носовій частині підводного апарату, закріплений з можливістю його повороту на 180° кронштейн з поперечкою, на обох боках якої встановлені крила, а в прорізу кормової частини є кронштейн з електродвигуном, на осі якого закріплено стебло з плавцевим рушієм.
Підводний апарат-транспортувальник
Номер патенту: 20094
Опубліковано: 15.01.2007
Автори: Бугаєнко Борис Андрійович, Андрейчикова Ганна Юріївна, Дубіна Марина Олександрівна, Галь Анатолій Федосійович
МПК: B63G 8/00
Мітки: підводний, апарат-транспортувальник
Формула / Реферат:
Підводний апарат-транспортувальник, який містить міцний корпус, що складається з носового, центрального і кормового відсіків у вигляді послідовно з'єднаних порожнистих сфер і/або порожнистих циліндрів із сферичними кінцевими частинами, поміщених в легкий корпус, енергетичну установку в кормовому відсіку, рушійно-рульовий комплекс з системою керування, цистерни головного баласту, багатоступеневий маніпулятор, балони повітря високого тиску,...
Попередній патент: Підводний апарат
Наступний патент: Модельна суміш
Випадковий патент: Сусловарильний апарат