Підводний апарат
Номер патенту: 20208
Опубліковано: 15.01.2007
Автори: Галь Анатолій Феодосійович, Дубіна Марина Олександрівна, Штефирца Анна Іллівна
Формула / Реферат
Підводний апарат, що містить міцний корпус у вигляді порожнистих носової й кормової сфер, послідовно з'єднаних між собою перехідним люком і поміщених у легкий обтічний корпус, і/або циліндрів зі сферичними кінцевими частинами, а також горизонтальний рушійно-стерновий комплекс, розташований у кормі підводного апарата, який відрізняється тим, що горизонтальний рушійно-стерновий комплекс виконано з одного або декількох центральних маршових рушійних модулів, установлених віссю упора рушія по осі підводного апарата, і ряду периферійних допоміжних рушійних модулів з осями упора рушіїв, розміщених симетрично навколо осі упора центрального маршового рушійного модуля.
Текст
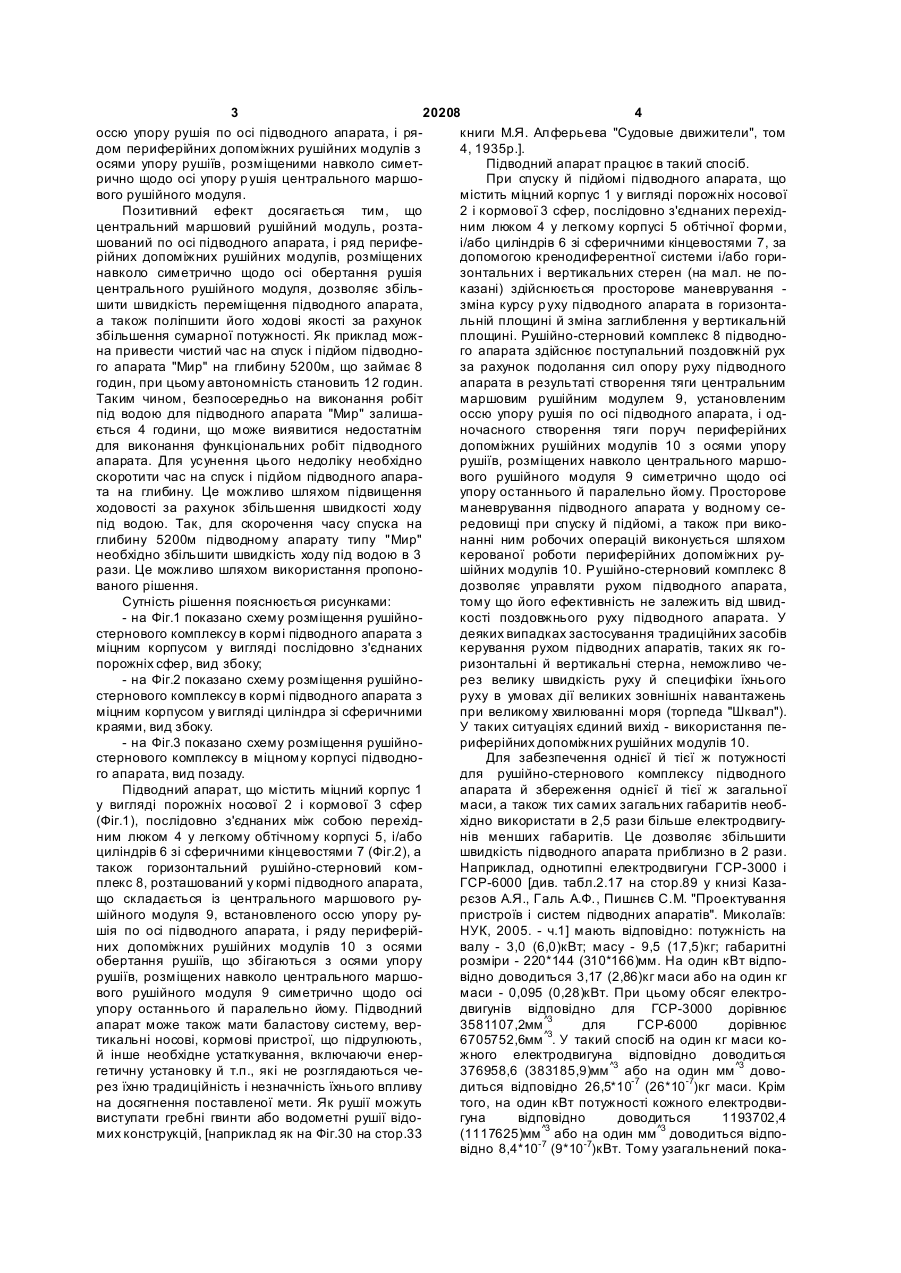
Підводний апарат, що містить міцний корпус у вигляді порожнистих носової й кормової сфер, послідовно з'єднаних між собою перехідним люком і поміщених у легкий обтічний корпус, і/або цилінд 3 20208 4 оссю упору рушія по осі підводного апарата, і рякниги М.Я. Алферьева "Судовые движители", том дом периферійних допоміжних рушійних модулів з 4, 1935р.]. осями упору рушіїв, розміщеними навколо симетПідводний апарат працює в такий спосіб. рично щодо осі упору р ушія центрального маршоПри спуску й підйомі підводного апарата, що вого рушійного модуля. містить міцний корпус 1 у вигляді порожніх носової Позитивний ефект досягається тим, що 2 і кормової 3 сфер, послідовно з'єднаних перехідцентральний маршовий рушійний модуль, розтаним люком 4 у легкому корпусі 5 обтічної форми, шований по осі підводного апарата, і ряд перифеі/або циліндрів 6 зі сферичними кінцевостями 7, за рійних допоміжних рушійних модулів, розміщених допомогою кренодиферентної системи і/або горинавколо симетрично щодо осі обертання рушія зонтальних і вертикальних стерен (на мал. не поцентрального рушійного модуля, дозволяє збільказані) здійснюється просторове маневрування шити швидкість переміщення підводного апарата, зміна курсу р уху підводного апарата в горизонтаа також поліпшити його ходові якості за рахунок льній площині й зміна заглиблення у вертикальній збільшення сумарної потужності. Як приклад можплощині. Рушійно-стерновий комплекс 8 підводнона привести чистий час на спуск і підйом підводного апарата здійснює поступальний поздовжній рух го апарата "Мир" на глибину 5200м, що займає 8 за рахунок подолання сил опору руху підводного годин, при цьому автономність становить 12 годин. апарата в результаті створення тяги центральним Таким чином, безпосередньо на виконання робіт маршовим рушійним модулем 9, установленим під водою для підводного апарата "Мир" залишаоссю упору рушія по осі підводного апарата, і одється 4 години, що може виявитися недостатнім ночасного створення тяги поруч периферійних для виконання функціональних робіт підводного допоміжних рушійних модулів 10 з осями упору апарата. Для усунення цього недоліку необхідно рушіїв, розміщених навколо центрального маршоскоротити час на спуск і підйом підводного апаравого рушійного модуля 9 симетрично щодо осі та на глибину. Це можливо шляхом підвищення упору останнього й паралельно йому. Просторове ходовості за рахунок збільшення швидкості ходу маневрування підводного апарата у водному сепід водою. Так, для скорочення часу спуска на редовищі при спуску й підйомі, а також при викоглибину 5200м підводному апарату типу "Мир" нанні ним робочих операцій виконується шляхом необхідно збільшити швидкість ходу під водою в 3 керованої роботи периферійних допоміжних рурази. Це можливо шляхом використання пропоношійних модулів 10. Рушійно-стерновий комплекс 8 ваного рішення. дозволяє управляти рухом підводного апарата, Сутність рішення пояснюється рисунками: тому що його ефективність не залежить від швид- на Фіг.1 показано схему розміщення рушійнокості поздовжнього руху підводного апарата. У стернового комплексу в кормі підводного апарата з деяких випадках застосування традиційних засобів міцним корпусом у вигляді послідовно з'єднаних керування рухом підводних апаратів, таких як гопорожніх сфер, вид збоку; ризонтальні й вертикальні стерна, неможливо че- на Фіг.2 показано схему розміщення рушійнорез велику швидкість руху й специфіки їхнього стернового комплексу в кормі підводного апарата з руху в умовах дії великих зовнішніх навантажень міцним корпусом у вигляді циліндра зі сферичними при великому хвилюванні моря (торпеда "Шквал"). краями, вид збоку. У таких ситуаціях єдиний вихід - використання пе- на Фіг.3 показано схему розміщення рушійнориферійних допоміжних рушійних модулів 10. стернового комплексу в міцному корпусі підводноДля забезпечення однієї й тієї ж потужності го апарата, вид позаду. для рушійно-стернового комплексу підводного Підводний апарат, що містить міцний корпус 1 апарата й збереження однієї й тієї ж загальної у вигляді порожніх носової 2 і кормової 3 сфер маси, а також тих самих загальних габаритів необ(Фіг.1), послідовно з'єднаних між собою перехідхідно використати в 2,5 рази більше електродвигуним люком 4 у легкому обтічному корпусі 5, і/або нів менших габаритів. Це дозволяє збільшити циліндрів 6 зі сферичними кінцевостями 7 (Фіг.2), а швидкість підводного апарата приблизно в 2 рази. також горизонтальний рушійно-стерновий комНаприклад, однотипні електродвигуни ГСР-3000 і плекс 8, розташований у кормі підводного апарата, ГСР-6000 [див. табл.2.17 на стор.89 у книзі Казащо складається із центрального маршового рурєзов А.Я., Галь А.Ф., Пишнєв С.М. "Проектування шійного модуля 9, встановленого оссю упору рупристроїв і систем підводних апаратів". Миколаїв: шія по осі підводного апарата, і ряду периферійНУК, 2005. - ч.1] мають відповідно: потужність на них допоміжних рушійних модулів 10 з осями валу - 3,0 (6,0)кВт; масу - 9,5 (17,5)кг; габаритні обертання рушіїв, що збігаються з осями упору розміри - 220*144 (310*166)мм. На один кВт відпорушіїв, розміщених навколо центрального маршовідно доводиться 3,17 (2,86)кг маси або на один кг вого рушійного модуля 9 симетрично щодо осі маси - 0,095 (0,28)кВт. При цьому обсяг електроупору останнього й паралельно йому. Підводний двигунів відповідно для ГСР-3000 дорівнює апарат може також мати баластову систему, вер3581107,2мм ^3 для ГСР-6000 дорівнює тикальні носові, кормові пристрої, що підрулюють, 6705752,6мм ^3. У такий спосіб на один кг маси кой інше необхідне устаткування, включаючи енержного електродвигуна відповідно доводиться гетичну установку й т.п., які не розглядаються че376958,6 (383185,9)мм ^3 або на один мм ^3 доворез їхню традиційність і незначність їхнього впливу диться відповідно 26,5*10-7 (26*10-7)кг маси. Крім на досягнення поставленої мети. Як рушії можуть того, на один кВт потужності кожного електродвивиступати гребні гвинти або водометні рушії відогуна відповідно доводиться 1193702,4 мих конструкцій, [наприклад як на Фіг.30 на стор.33 (1117625)мм ^3 або на один мм ^3 доводиться відповідно 8,4*10-7 (9*10-7)кВт. Тому узагальнений пока 5 20208 6 зник для габаритних розмірів при одній і тій же (50%) одного типу й 50% іншого типу електродвипотужності й масі буде дорівнювати відповідно для гунів більшої потужності збільшення швидкості першого й другого типів електродвигунів 26,5*10руху підводного апарата приблизно в 2,5 рази. 7 *8,4*10-7=222,6*10-14 (26*10-7*9*10-7=234*10-14). Позитивний ефект, що дозволяє збільшити Таким чином, універсальний показник для однієї й швидкість ходу під водою підводного апарата, а тієї ж потужності, маси й габаритів для обраних також поліпшити його ходові якості й маневреність типів електродвигунів дорівнює відповідно на повному ходу й скоротити час на спуск і підйом, 0,3*222,6*10-14=66,78*10-14 (0,8*234*10-14 =187,2*10досягається тим, що підводний апарат постачений 14 ). Звідси для того, щоб забезпечити, наприклад, горизонтальним рушійно-стерновим комплексом, потужність 100кВт необхідно 6,678 (~7) штук елекщо містить центральний маршовий рушійний мотродвигунів типу ГСР-3000 і при збереженні тієї ж дуль 9, установлений оссю упору рушія по осі підмаси й габаритів - 18,72 (~19) штук електродвигуводного апарата, і ряд периферійних допоміжних нів типу ГСР-6000, тобто в 2,8 рази більше. Умоврушійних модулів 10 з осями упору рушіїв, розміно можна вважати, що це може дати при зберещених навколо центрального маршового рушійноженні загальних габаритів і загальної маси го модуля 9 симетрично відносно осі упору останелектродвигунів, при частковому використанні нього й паралельно йому. Комп’ютерна в ерстка М. Мацело Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUnderwater vehicle
Автори англійськоюHal Anatolii Feodosiiovych, Dubina Maryna Oleksandrivna, Shtefyrtsa Anna Illivna
Назва патенту російськоюПодводный аппарат
Автори російськоюГаль Анатолий Феодосьевич, Дубина Марина Александровна, Штефирца Анна Ильинична
МПК / Мітки
МПК: B63G 8/00
Код посилання
<a href="https://ua.patents.su/3-20208-pidvodnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Підводний апарат</a>
Підводний апарат з плавцевим рушієм

Номер патенту: 49237
Опубліковано: 16.09.2002
Автори: Бабенко Віктор Віталійович, Поліщук Сергій Володимирович
Мітки: плавцевим, підводний, рушієм, апарат
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни поворотного типу, який відрізняється тим, що в корпусі апарата виконані виїмки, в яких встановлені пластини з можливістю їх повороту навколо поздовжньої осі корпусу апарата, а в тілі головного плавцевого рушія додатково розміщено електродвигун, з’єднаний кронштейном з додатковим плавцевим рушієм з можливістю його коливання у площині,...
Рятувальний підводний апарат

Номер патенту: 16642
Опубліковано: 15.08.2006
Автори: Дубіна Марина Олександрівна, Галь Анатолій Феодосійович
МПК: B63B 3/13, B63G 8/00, B63C 9/00
Мітки: підводний, рятувальний, апарат
Формула / Реферат:
1. Рятувальний підводний апарат, що містить міцний корпус у вигляді послідовно сполучених порожнистих сфер, поміщених в легкий корпус, а одна з сфер забезпечена основною камерою присоса, розташованою в нижній частині сфери, який відрізняється тим, що забезпечений додатковими бічними камерами присоса.2. Рятувальний підводний апарат за п. 1, який відрізняється тим, що основна камера присоса розташована в центральній сфері міцного...
Підводний апарат з плавцевим рушієм
Номер патенту: 41724
Опубліковано: 17.09.2001
Автори: Майстер Валентин Іванович, Поліщук Сергій Володимирович, Бабенко Віктор Віталійович
Мітки: плавцевим, підводний, апарат, рушієм
Формула / Реферат:
Підводний апарат з плавцевим рушієм, який містить крило, на поверхні якого є переміжні зубці та западини, який відрізняється тим, що в корпусі апарата та плавцевого рушія встановлені соленоїди, підпружинені сердечники яких жорстко з'єднані з циліндром, на поверхні якого додатково розміщені переміжні зубці та западини, і коробом, які мають можливість висування відповідно з корпусу апарата та плавцевого рушія.
Підводний апарат-транспортувальник
Номер патенту: 20094
Опубліковано: 15.01.2007
Автори: Андрейчикова Ганна Юріївна, Галь Анатолій Федосійович, Бугаєнко Борис Андрійович, Дубіна Марина Олександрівна
МПК: B63G 8/00
Мітки: апарат-транспортувальник, підводний
Формула / Реферат:
Підводний апарат-транспортувальник, який містить міцний корпус, що складається з носового, центрального і кормового відсіків у вигляді послідовно з'єднаних порожнистих сфер і/або порожнистих циліндрів із сферичними кінцевими частинами, поміщених в легкий корпус, енергетичну установку в кормовому відсіку, рушійно-рульовий комплекс з системою керування, цистерни головного баласту, багатоступеневий маніпулятор, балони повітря високого тиску,...
Підводний апарат з плавцевим рушієм
Номер патенту: 41616
Опубліковано: 17.09.2001
Автори: Мартиненко Іван Іванович, Поліщук Сергій Володимирович, Коробов Віталій Ілліч, Мороз Володимир Василійович, Бабенко Віктор Віталійович
Мітки: рушієм, плавцевим, апарат, підводний
Формула / Реферат:
Підводний апарат з плавцевим рушієм, в носовій і кормовій частинах якого розміщені електродвигуни, який відрізняється тим, що на вихідному валу електродвигуна, розміщеного в носовій частині підводного апарату, закріплений з можливістю його повороту на 180° кронштейн з поперечкою, на обох боках якої встановлені крила, а в прорізу кормової частини є кронштейн з електродвигуном, на осі якого закріплено стебло з плавцевим рушієм.
Попередній патент: Застосування дезінфікуючого засобу “дівозан-форте” як окисника ненасичених полімерів
Наступний патент: Підводний апарат
Випадковий патент: Установка для приготування та електромагнітного розливання алюмінієвих сплавів у ливарні форми