Спосіб керування виконавчими механізмами технологічного обладнання енергоблока

Формула / Реферат
1. Спосіб керування виконавчими механізмами технологічного обладнання енергоблока, який включає обробку сигналів в каналах, які складаються із послідовно з'єднаних групи блоків первинної обробки сигналів, блока функціональних алгоритмів, блока формування вихідних сигналів, який полягає в тому, що приймають сигнали від датчиків технологічних параметрів, гальванічно розділяють вхідні сигнали, первинно обробляють їх у відповідності із закладеними в програмовних логічних інтегральних схемах алгоритмами, перевіряють знаходження вхідних сигналів в робочому діапазоні, перетворюють вхідні сигнали і приводять до єдиного типу даних, тимчасово зберігають первинні дані, обмінюють первинні дані даного каналу з аналогічними первинними даними інших каналів, усереднюють і обробляють їх за мажоритарним принципом 2 із 3, порівнюють отримані первинні дані з уставками, обмінюють результати порівняння даного каналу з аналогічними результатами порівняння інших каналів, обробляють по закладених в програмовних логічних інтегральних схемах алгоритмах результати порівняння усереднених первинних даних за мажоритарним принципом 2 із 3, виробляють керуючі дії по кожному алгоритму, логічно обробляють керуючі дії по всіх закладених в програмовних логічних інтегральних схемах алгоритмах, виробляють і формують результуючі керуючі дії для виконавчих механізмів каналу, передають результуючі керуючі дії в інші канали системи, діагностують усі внутрішні ланцюги і передають отриману інформацію в систему діагностики, приймають результуючі керуючі дії від інших каналів системи, обробляють результуючі керуючі дії за мажоритарним принципом 2 із 3, формують підсумковий керуючий сигнал для конкретного виконавчого механізму технологічного обладнання.
2. Спосіб за п. 2, який відрізняється тим, що міжканальні сигнали на рівнях цифрових вхідних потоків, формування проміжних керуючих дій, формування підсумкового керуючого сигналу обробляють за потрійним принципом мажоритарної обробки 2 із 3.
Текст
Корисна модель відноситься до пристроїв автоматики, а саме до систем керування виконавчими механізмами технологічного обладнання енергоблоків. Відомі пристрої керування, які будуються по одному із наступних принципів: із застосуванням універсальних електронних компонентів „жорсткої" логіки малого, середнього та високого ступеню інтеграції або із застосуванням програмуємих мікроконторлерів. Відомі системи, які мають традиційну канальну структур у, блочно-модульний принцип побудови, обробка сигналів здійснюється по принципу порозрядної мажоритарної обробки. Відома система керування по [А.С. №1341684, МПК G21C 7/36], яка містить щонайменше три канали, які складаються з послідовно з'єднаних групи блоків первинної обробки сигналів, блоку функціональних алгоритмів, блоку формування вихідних сигналів. Обробка сигналів здійснюється по принципу порозрядної мажоритарної обробки. До недоліків відомих пристроїв відноситься потреба у великій кількості обладнання і технічних засобів для реалізації покладених задач, недостатній рівень надійності роботи та швидкодії, обмеженні функціональні можливості. Метою корисної моделі є забезпечення безпеки і підвищення надійності роботи енергоблоку, швидкодія, стійкість до відмов технічних засобів, розширення функціональних можливостей системи управління. В основу корисної моделі поставлено задачу, створення системи і забезпечення способу керування виконавчими механізмами технологічного обладнання енергоблоку з використанням існуючих принципів побудови і логіки роботи, шляхом реалізації існуючих алгоритмів на новій елементній базі, а саме програмуємих логічних інтегральних схем (ПЛІС), забезпечить безпечну експлуатацію енергоблоків, високу надійність роботи, швидкодію, розширення функціональних можливостей системи керування, можливість швидкої заміни існуючих алгоритмів іншими, зменшення кількості технічних засобів і обладнання для реалізації управляючих дій. Поставлене завдання вирішується тим, що в системі керування виконавчими механізмами технологічного обладнання енергоблоку, яка містить щонайменше три канали, які складаються із послідовно з'єднаних групи блоків первинної обробки сигналів, блоку функціональних алгоритмів, блоку формування вихідних сигналів, блоки первинної обробки сигналів та блок функціональних алгоритмів кожного каналу реалізовані на базі програмуємих логічних інтегральних схем (ПЛІС). Спосіб керування виконавчими механізмами технологічного обладнання енергоблоку в каналах системи заключається в тому, що приймають сигнали від датчиків технологічних параметрів, гальванічне розділяють вхідні сигнали, первинне обробляють їх у відповідності із закладеними в програмуємих логічних інтегральних схемах алгоритмами, перевіряють находження вхідних сигналів в робочому діапазоні, перетворюють вхідні сигнали і приводять до єдиного типу даних, тимчасово зберігають первинні дані, обмінюють первинні дані даного каналу з аналогічними первинними даними інших каналів, усереднюють і обробляють їх по мажоритарному принципу 2 із 3, порівнюють отриманні первинні дані з уставками, обмінюють результати порівняння даного каналу з аналогічними результатами порівняння інших каналів, обробляють по закладеним в ПЛІС алгоритмам результати порівняння усереднених первинних даних по мажоритарному принципу 2 із 3, виробляють управляючі дії по кожному алгоритму, логічно обробляють управляючі дії по всім закладеним в ПЛІС алгоритмам, виробляють і формують результуючі управляючі дії для виконавчих механізмів каналу, передають результуючі управляючі дії в інші канали системи, діагностують усі вн утрішні ланцюги і передають отриману інформацію в систему діагностики, приймають результуючі управляючі дії від інших каналів системи, обробляють результуючі управляючі дії по мажоритарному принципу 2 із 3, формують підсумковий управляючий сигнал для конкретного виконавчого механізму технологічного обладнання. Міжканальні сигнали на рівнях цифрових вхідних потоків, формування проміжних управляючих дій, формування підсумкового управляючого сигналу обробляють по потрійному принципу мажоритарної обробки 2 із 3. Порівняльний аналіз з відомими технічними рішеннями показав, що технічне рішення, яке пропонується відрізняється наявністю відмітних особливостей, які забезпечують нові технічні властивості системи та забезпечення способу керування виконавчими механізмами технологічного обладнання енергоблоку. Технічнийрезультат - забезпечення безпечної експлуатації енергоблоку, висока надійність системи управління, стійкість до відмов технічних засобів, розширення функціональних можливостей, можливість використання як нової системи так і модернізація існуючих систем керування виконавчими механізмами технологічного обладнання енергоблоку. На фігурі 1 представлена блок-схема системи керування виконавчими механізмами технологічного обладнання енергоблоку. Система керування виконавчими механізмами технологічного обладнання енергоблоку містить канали 1, які складаються з групи блоків 2 первинної обробки сигналів, блоку 3 функціональних алгоритмів, блоку 4 формування вихідних сигналів. Система керування виконавчими механізмами технологічного обладнання енергоблоку працює наступним чином. Система керування виконавчими механізмами технологічного обладнання енергоблоку збирає інформацію про текучий стан технологічних процесів. Сигнали від датчиків надходять в групу блоків 2 первинної обробки сигналів, де проходять первинну обробку у відповідності до закладених в ПЛІС алгоритмів. Далі сигнали надходять в блок 3 функціональних алгоритмів, схемотехніка якого базується на використанні ПЛІС, де вони обробляються. З блоку 3 функціональних алгоритмів сигнали надходять в блок 4 формування вихідних сигналів. Використання потрійного принципу мажоритарної обробки сигналів на рівнях цифрових вхідних потоків, формування проміжних управляючих дій, формування підсумкового управляючого сигналу управління виконавчими механізмами дозволило створити структуру пристрою, який має велику стійкість до відмов технічних засобів. Такий принцип дозволить зберегти працездатність системи в цілому при наявності несправності в кожному каналі (при умові, що несправності знаходяться в різних блоках). Наприклад, в системі управління може відмовити первинний датчик першого каналу, блок первинної обробки сигналів другого каналу, блок функціональних алгоритмів третього каналу і система збереже 100% - працездатність. Це дозволить використовува ти систему, яка пропонується, там де потрібна велика надійність. Переваги вищезазначеної системи керування виконавчими механізмами технологічного обладнання енергоблоку, а саме використання ПЛІС дозволить: по-перше, в порівняння із застосуванням універсальних електронних компонентів „жорсткої" логіки малого, середнього та високого ступеню інтеграції значно зменшити кількість обладнання і технічних засобів для реалізації поставлених задач, по-друге у порівнянні із застосуванням програмуємих мікроконторлерів програмне забезпечення не потребує процедур верифікації і валідації. Сутність способу керування виконавчими механізмами технологічного обладнання енергоблоку заключається в тому, що при обробці сигналів в каналах системи, які складаються із послідовно з'єднаних групи блоків первинної обробки сигналів, блоку функціональних алгоритмів, блоку формування вихідних сигналів, блоки первинної обробки сигналів приймають сигнали від датчиків технологічних параметрів, гальванічне розділяють вхідні сигнали, первинне обробляють їх у відповідності із закладеними в ПЛІС алгоритмами, перевіряють находження вхідних сигналів в робочому діапазоні, перетворюють вхідні сигнали і приводять до єдиного типу даних. Блоки функціональних алгоритмів, схемотехніка яких базується на використанні ПЛІС, тимчасово зберігають первинні дані, обмінюють первинні дані свого каналу з аналогічними первинними даними інших каналів системи, усереднюють і обробляють їх по мажоритарному принципу 2 із 3, порівнюють отриманні первинні дані з уставками, обмінюють результати порівняння даного каналу з аналогічними результатами порівняння інших каналів, обробляють по закладеним в ПЛІС алгоритмам результати порівняння усереднених первинних даних по мажоритарному принципу 2 із 3, виробляють управляючі дії по кожному алгоритму, логічно обробляють управляючі дії по всім закладеним в ПЛІС алгоритмам, виробляють і формують результуючі управляючі дії для виконавчих механізмів технологічного обладнання каналу, передають результуючі управляючі дії в інші канали системи, діагностують усі внутрішні ланцюги і передають отриману інформацію в систему діагностики. Блок формування вихідних сигналів приймають результуючі управляючі дії від інших каналів системи, обробляють результуючі управляючі по дії мажоритарному принципу 2 із 3, формують підсумковий управляючий сигнал для конкретного виконавчого механізму технологічного обладнання. Міжканальні сигнали на рівнях цифрових вхідних потоків, формування проміжних управляючих дій, формування підсумкового управляючого сигналу обробляють по потрійному принципу мажоритарної обробки 2 із 3. В якості прикладу застосування способу розглянемо спосіб керування виконавчими механізмами технологічного обладнання енергоблоку атомної електростанції (АЕС). Спосіб керування виконавчими механізмами технологічного обладнання енергоблоку атомної електростанції (АЕС) включає прийом і обробку сигналів в каналах системи керування виконавчими механізмами технологічного обладнання енергоблоку АЕС, які складаються із послідовно з'єднаних групи блоків первинної обробки сигналів, блоку функціональних алгоритмів і блоку формування вихідних сигналів. Сигнали про стан технологічних процесів від датчиків виміру витрати, рівня, тиску, температури та ін., розташованих безпосередньо поблизу від технологічних судин і обладнання реакторної і турбінної установок, надходять в групу уні фікованих блоків 2 первинної обробки сигналів. Блоки 2 первинної обробки сигналів приймають і гальванічне розділяють вхідні сигнали від датчиків з метою забезпечення незалежності каналів виміру і запобігання поширення несправностей із каналу в канал. Тип вхідних сигналів визначає вхідні ланцюги і тип спеціалізованих мікросхем обробки вхідних сигналів. Первинне обробляють сигнали у відповідності закладеними в ПЛІС алгоритмами, серед яких треба відзначити як вузько- і широкосмугова фільтрація, демпфірування, кореляційна обробка. Перевіряють находження вхідних сигналів в робочому діапазоні, виконують цифро-аналогове перетворення вхідних сигналів, приводять їх до єдиного типу даних, зручному для послідуючої обробки в блоці функціональних алгоритмів. По лініям зв'язку передають первинне оброблені данні від блоку прийому і первинної обробки в блок функціональних алгоритмів для подальшої обробки. В блоці функціональних алгоритмів схемотехніка якого базується на використанні ПЛІС тимчасово зберігають первинні данні, які надходять у вигляді цифрових потоків, обмінюють отриманні первинні данні даного каналу з аналогічними даними інших каналів, усереднюють отримані від них значення по кожному те хнологічному параметру і обробляють по мажоритарному принципу 2 із 3. При чому отриману інформацію постійно перевіряють на вірогідність по ступеню новизни і захисту від „зависання" каналів передачі даних і по находженню кожного вхідного сигналу в робочому діапазоні. Порівнюють отримані дані з уставками (граничними значеннями технологічних параметрів), які зберігаються в пам'яті ПЛІС у вигляді цифрових значень по кожному порогу контролюємої величини кожного параметру. Обмінюють результати порівняння даного каналу з аналогічними результатами порівняння інших каналів. Обробляють по закладеним алгоритмам результати порівняння усереднених первинних даних з пороговими значеннями і виробляють управляючі дії. Логічно обробляють управляючі дії по всім закладеним алгоритмам в залежності від результатів їх роботи, виробляють і формують результуючі управляючі дії для виконавчого механізму першого каналу. Передають результуючі управляючі дії в два інших канали системи для їхньої послідуючої обробки на рівні блоків формування вихідних сигналів. В блок формування вихідних сигналів приймають результуючі і управляючі дії від свого каналу і інших каналів системи, обробляють їх по мажоритарному принципу 2 із 3, формують підсумковий управляючий сигнал, які мають необхідні параметри струму і напруги для включення виконавчого механізму і контролю справності вихідних ланцюгів по стр уму, який протікає по ланцюгам управління виконавчими механізмами в робочому стані. Використання заявленої системи і способу управління виконавчими механізмами енергоблоку АЕС дозволить поєднувати в єдиному конструкторсько-технічному рішенні, наприклад, в програмно-технічному комплексі АРМ РОМ УПЗ, функції таких підсистем як автоматичного регулятора потужності (АРМ), пристрою розвантаження і обмеження потужності (РОМ) і прискореного попереджувального захисту (УПЗ). Канали містять ідентичні апаратні і програмні засоби і управляються по аналогічним програмам. Створення системи і способу управління виконавчими механізмами енергоблоку АЕС, заснованої на використанні існуючих алгоритмів, випробуваних довгостроковим досвідом експлуатації АЕС, але реалізованих на програмуємих логічних інтегральних схемах не потребує суттєви х змін технологічного регламенту безпечної експлуатації і те хнічного обґрунтування безпеки енергоблоків, забезпечує приємність при заміні існуючих підсистем і дозволяє проводити таку заміну за короткий термін середнього планово-попереджувального ремонту.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling actuating devices in the process equipment of a power-generating unit
Назва патенту російськоюСпособ управления исполнительными устройствами в составе технологического оборудования энергоблока
МПК / Мітки
МПК: G21C 7/00, G05B 19/418
Мітки: механізмами, керування, енергоблока, технологічного, спосіб, обладнання, виконавчими
Код посилання
<a href="https://ua.patents.su/3-22172-sposib-keruvannya-vikonavchimi-mekhanizmami-tekhnologichnogo-obladnannya-energobloka.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування виконавчими механізмами технологічного обладнання енергоблока</a>
Пристрій для зчитування, класифікації інформації та автоматичного керування виконавчими механізмами
Номер патенту: 28786
Опубліковано: 16.10.2000
Автори: Ісаєв Леонід Олексійович, Якобчук Миколай Володимирович
МПК: G06K 9/20
Мітки: зчитування, автоматичного, керування, механізмами, інформації, пристрій, класифікації, виконавчими
Формула / Реферат:
Пристрій для зчитування, класифікації інформації та автоматичного керування виконавчими механізмами, що містять носій інформації, електронно-оптичний модуль, пов'язаний через процесор з виконавчими механізмами, який відрізняється тим, що носій інформації (картка) виробляється з композиційного матеріалу з зональне розташованими у робочій частині, яка видаляється у процесі експлуатації, хімічними домішками, які є чутливими до світлових променів...
Пристрій для автоматичного збору і обробки діагностичної інформації про технічний стан обладнання і хід технологічного процесу
Номер патенту: 76510
Опубліковано: 15.08.2006
Автори: Міщенко Петро Дмитрович, Мисько Степан Миколайович, Шнипко Андрій Іванович, Кекух Анатолій Володимирович, Козенко Георгій Володимирович, Шеремет Володимир Олександрович, Брехунов Олександр Васильович, Нечитайло Віктор Михайлович, Савенчук Сергій Васильович
МПК: G01M 7/00, G01D 21/00
Мітки: автоматичного, хід, стан, обладнання, інформації, обробки, пристрій, процесу, технологічного, діагностичної, технічний, збору
Формула / Реферат:
Пристрій для автоматичного збору і обробки діагностичної інформації про технічний стан обладнання і хід технологічного процесу, що містить первинні перетворювачі параметрів технічного стану механізмів, блок первинної обробки сигналів параметрів технічного стану механізмів, схему визначення діагностичної ситуації, блок введення уставок, блок формування оперативної бази даних, генератор часових міток, схему перезапису інформації, блок індикації...
Гідросистема керування механізмами нижньої траверси преса для пресування сипучих сумішей
Номер патенту: 54306
Опубліковано: 17.02.2003
Автори: Газдайка Богдан Петрович, Наняк Олег Михайлович, Козей Віктор Євгенович, Вагула Роман Григорович, Бек Юрій Маркіянович
МПК: B30B 15/00, B28B 3/00
Мітки: сумішей, керування, траверси, нижньої, преса, гідросистема, пресування, сипучих, механізмами
Формула / Реферат:
Гідросистема керування механізмами нижньої траверси преса для пресування сипучих сумішей, що містить комбінований циліндр переміщення нижніх штампів, циліндри фіксації нижніх штампів, акумулятор, два двопозиційні золотникові розподільники, гідравлічний мотор переміщення каретки і зворотний клапан, яка відрізняється тим, що вона додатково обладнана трипозиційним та двопозиційним золотниковими розподільниками; при цьому входи золотникових...
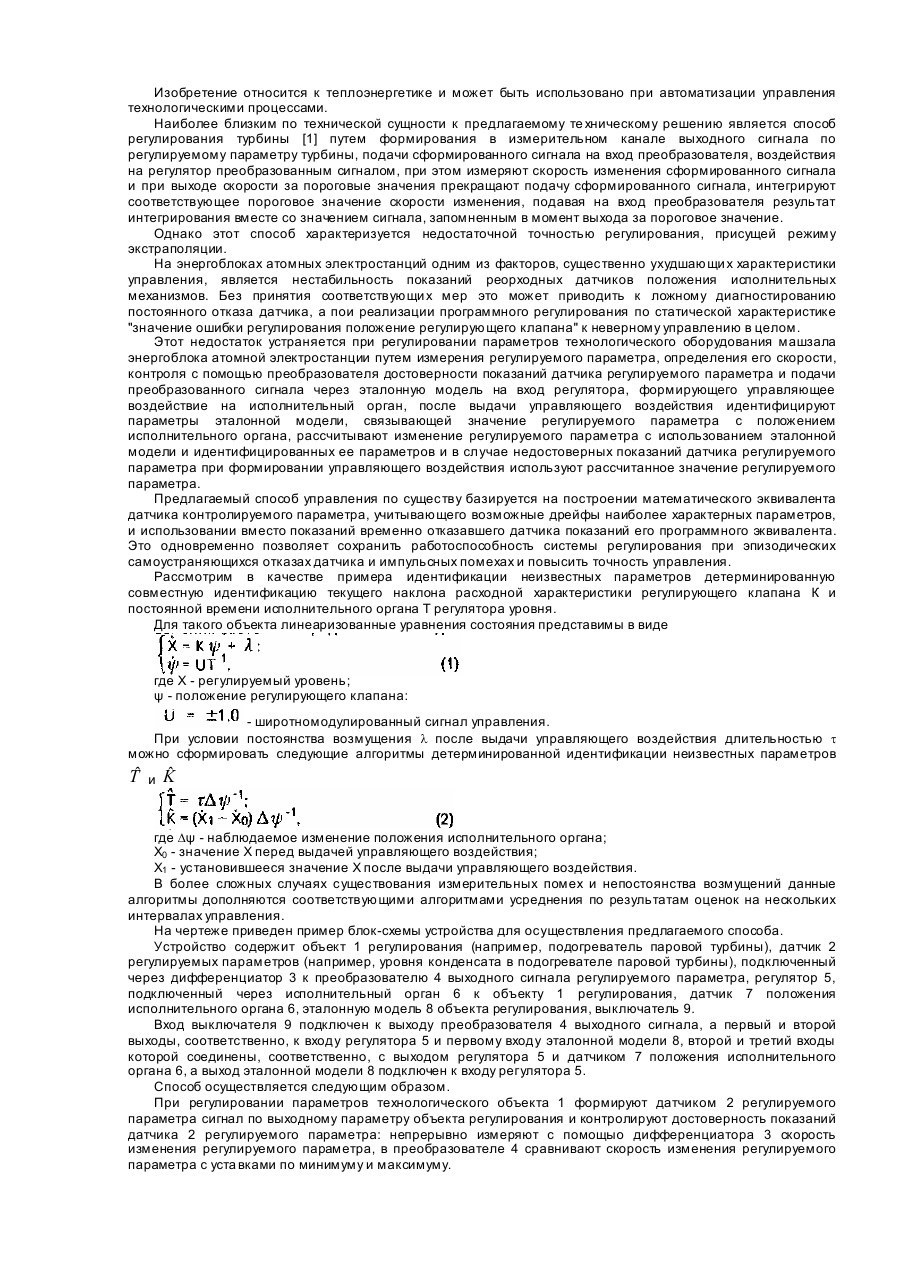
Спосіб регулювання параметрів технологічного устаткування машзалу енергоблока атомної електростанції
Номер патенту: 18695
Опубліковано: 25.12.1997
Автори: Кожина Ольга Володимирівна, Королько Людмила Василівна, Макаренко Микола Іванович, Нікітін Юрій Васильович
МПК: F01D 17/00
Мітки: машзалу, регулювання, устаткування, електростанції, технологічного, спосіб, параметрів, енергоблока, атомної
Формула / Реферат:
Способ регулирования параметров технологического оборудования машзала энергоблока атомной электростанции путем измерения регулируемого параметра, определения его скорости, контроля с помощью преобразователя достоверности показаний датчика регулируемого параметра и подачи преобразованного сигнала через эталонную модель на вход регулятора, формирующего управляющее воздействие на исполнительный орган, отличающийся тем, что после выдачи...
Спосіб зупинення енергоблока атомної електростанції і схема енергоблока для його реалізації
Номер патенту: 75146
Опубліковано: 15.03.2006
Автори: Крук Віталій Юрійович, Мисак Йосиф Степанович, Матусевич Вадим Костянтинович, Клуб Михайло Васильович, Близнюк Василь Федорович
МПК: G21D 3/00
Мітки: реалізації, спосіб, зупинення, електростанції, енергоблока, схема, атомної
Формула / Реферат:
1. Спосіб зупинення енергоблока атомної електростанції з системою проміжної сепарації і перегріву пари шляхом відключення генератора і припинення подачі пари з головних паропроводів у турбіну і скидання дросельованої свіжої пари у конденсатор, який відрізняється тим, що додатково здійснюють скидання сепарату і конденсату з системи проміжної сепарації і перегріву пари (сепараторів-пароперегрівників, сепаратозбірників і конденсатозбірників), ...
Попередній патент: Пристрій для пересування інвалідів з первинною міопатією
Наступний патент: Жалюзі з горизонтальними ламелями
Випадковий патент: Спосіб отримання трести конопель весняного приготування з паралельним розташуванням стебел