Спосіб модульного формування машинно-тракторного комплексу
Формула / Реферат
Спосіб модульного формування машинно-тракторного комплексу, при якому послідовно з'єднують модуль керування та активний технологічний модуль у складі силового агрегату і робочого органа, об'єднаних в єдине ціле, модуль керування оснащують колісним, а силовий агрегат - гусеничним рушіями, при цьому забезпечують величину опорного тиску рушіїв на ґрунт за умови беззалишкового екологічного впливу, який відрізняється тим, що елементи технологічного модуля додатково оснащують колісною пасивною ходовою системою, яку використовують при транспортуванні комплексу по шляхах загального призначення, зміні робочих місць та в місцях циклічної зміни напрямків ґрунтообробки, тиск колісних рушіїв технологічного модуля на опорну поверхню ґрунту задають рівним нормативному для переміщення важкої транспортної техніки по шляхах загального призначення, а роботу двигуна тракторного агрегату задають, в моменти виконання ґрунтообробки, відповідним полиці постійної потужності та при його введенні в роботу використовують системи модуля керування.
Текст
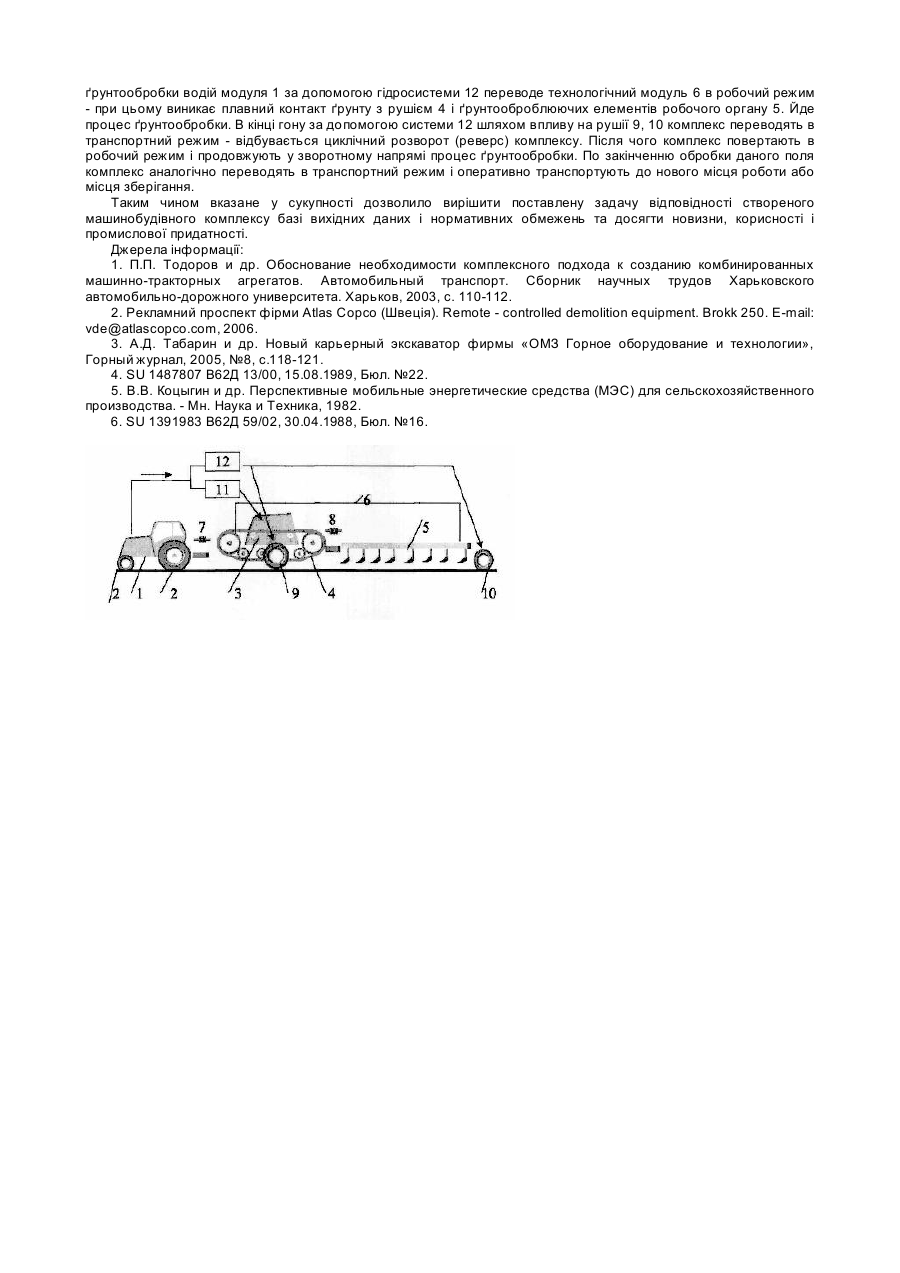
Корисна модель відноситься до транспортного машинобудування, зокрема як сукупність операцій покладених в основу комплексу у складі транспортного і технологічного модулів, останній об'єднує в собі силовий агрегат та робочий орган, призначених для ведення сільськогосподарських робіт, пов'язаних з обробкою землі, з рішенням питань підвищення продуктивності та розширення за рахунок технологічної універсальності області використання, також позитивного екологічного впливу на ґрунт, підняття коефіцієнта завантаження складових частин їх енергетичних показників і ресурсозбереження. Крім того, корисна модель може знайти використання при розробці обладнання для зняття і утилізації ґрунту при розкриві гірничих родовищ, транспортному і енергетичному будівництві, тощо. Характерними особливостями експлуатації машинно-тракторних комплексів в умовах сільськогосподарської та гірничої галузей, де вони мають найбільше використання, є ряд обмежень, які покладені в основу пропонованого технологічного рішення. Зокрема до вказаних особливостей відносяться обмеження дії рушія машини на поверхню ґрунту за умови виключення залишкового екологічного впливу при одночасному досягненні необхідного тягового зусилля. Наведене в залежності від галузі експлуатації комплексу лежить в межах до 0,8кг/см2 і регламентується відповідними нормативними документами для комплексів, працюючих в умовах сільського господарства, і від 0,9 до 15кг/см2 - для комплексів, працюючих в умовах відкритих і підземних гірничих виробок. При цьому аналіз характеристик тракторів закордонного виробництва зокрема моделей «Chellenger», згідно [1], показує, що величина тиску опорної поверхні рушія трактора в залежності від ширини гусеничної стрічки коливається від 0,34 до 0,99кг/см2. В свою чергу, згідно [2], для машин фірми Атлас Копко величина вказаного тиску складає 14кг/см2, але при експлуатації комплексів в умовах гірничої галузі регламентується лише необхідність досягнення відповідного тягового зусилля, а обмеження екологічного впливу на підошву виробки відсутні; до відому для екскаваторів типу ЭКГ-1500р вказаний показник знаходиться в межах 2,6кг/см2 [3]. Для зменшення екологічного впливу комплексів сільськогосподарської спеціалізації практикують спарювання, а то навіть строювання коліс, також використовують широкопрофільні шини мінімального тиску. Останнє вступає в чергове обмеження в частині регламентації габаритної ширини комплексу до величини, що не перевищує 2500мм із-за зменшення маневреності, що регламентується відповідними нормативами в частині заборони переміщення по шляхам загального призначення без відповідних узгоджень і дозволів. При цьому типова величина питомого тиску на ґрунт при переміщенні важкої транспортної техніки по шляхам загального призначення лежить в своїй більшості в межах 0,9-5,6кг/см2. Відомо, що найбільшу рентабельність і своєчасність виконання особливо важких робіт при обробці ґрунту забезпечують надпотужні гусеничні трактори, потужність двигунів яких досягає 500к.с. В свою чергу використання такого обладнання на інших роботах (транспортування, збір урожаю, тощо) фактично неможливе так як при цьому необхідні широкозахватні засоби, також виникає потреба великої площі розворотних смуг, економічна недоцільність і відповідно в цілому має місце низьке використання дорогої техніки. На фоні наведеного питоме використання малопотужних тракторів з колісними рушіями на транспортуванні перевищує 50%. В реальних умовах діапазон робочих швидкостей особливо потужних тракторів при виконанні орних робіт складає 7-9км/год при зміні навантаження із-за різниці показників ґрунту відповідно ± 16%. Що при запасі крутного моменту, створюваного двигуном в 32%, забезпечується рух комплексу без зміни швидкості його (двигуна) роботи. При цьому сучасні двигуни мають в своїх характеристиках так звану «полицю постійної потужності» при одночасному запасі крутного моменту більше 50% (тобто виконується умова 50%>32%). Наведене дозволяє двигуну з таким запасом крутного моменту працювати в межах технологічної швидкості без трансмісії з коробкою ступеневого переключення швидкостей та з оптимальним коефіцієнтом корисної дії. Таким чином, наведені характерні особливості експлуатації сучасних машинно-тракторних комплексів в першу чергу як виробів сільськогосподарського машинобудування, а саме: необхідність обмеження залишкового екологічного впливу на родючий ґрунт також ширини складових частин комплексу для їх безузгоджувального оперативного транспортування, включаючи шляхи загального призначення, використання на орних роботах потужних тракторів із оптимально сформованими режимами за потужністю, крутним моментом, коефіцієнтом корисної дії і відповідною швидкістю робочих процесів з відмовою від трансмісії зі зміною передаточного відношення, формування агрегату з модулів малопотужного модуля керування на пневмошинному рушію, силового моноблока у складі потужного силового агрегату, обладнаного одночасно активним гусеничним рушієм і пасивною колісної ходовою системою, та робочого (наприклад орного) органу є базою даних для створення способу модульного формування машинно-тракторних комплексів сільськогосподарської спеціалізації. Відомий спосіб при якому формують комплекс у вигляді шарнірно-зчленованої платформи з переднім колісним рушієм, на платформі розмішують основне технологічне обладнання включаючи приводний двигун силовий агрегат, і забезпечують мінімальність розворотної смуги, при цьому одночасно обмежують кут складання шарнірно-зчленованої платформи [4]. Недоліками даного технічного рішення є обмеженість функціональних можливостей, пасивність в частині формування тягового зусилля послідуючими колісними парами сформованого комплексу і складність його системи керування. Більш близьким до заявляємої корисної моделі, згідно [5], є спосіб формування колісно-гусеничного комбінованого машинно-тракторного агрегату для одночасного виконання декількох видів робіт (ґрунтообробна, внесення добрив, сівба), при якому комплекс формують у вигляді послідовно з'єднаних транспортного модуля з колісним рушієм та активного технологічного модуля з робочим орним чи посівним органом з гусеничним рушієм, останній модуль облаштовують автономним приводом, при цьому площу гусеничного рушія, контактуючого з ґрунтом, задають за умови мінімального екологічного впливу на оброблюваний ґрунт. Недоліками даного рішення є обмеженість функціональних можливостей в тому числі неможливість оперативної зміни місця роботи комплексу без використання допоміжних транспортних засобів, наявність десинхронізації дії тягових зусиль транспортного і технологічного модулів, необхідність значної розворотної площі, наявність індивідуальної в кожному модулі системи запуску двигунів, трансмісій з переключенням швидкостей, недоцільний рівень масогабаритних показників комплексу. Прототипом пропонованої корисної моделі за цільовим використанням, модульному виконанню, операціям реалізації, енергетичним потокам, складовим частинам, близькості використання є спосіб, реалізований у зчленованому повноприводному гусеничному транспортному засобові, при якому формують комплекс у вигляді послідовно з'єднаних транспортного і активного технологічного модулів, при цьому активність останнього забезпечують кінематичним зв'язком рушіїв обох модулів з використанням редуктора синхронного вала відбирання потужності енергетичного модуля [6]. Але і найближчий аналог не в повній мірі відповідає наведеним вище вихідним даним створення машиннотракторного комплексу, в тому числі обмеженими функціональними можливостями, неможливістю транспортування по шляхам загального призначення, складність машинобудівного забезпечення вала відбору потужності, підвищеними масогабаритними показниками, тощо. Задача корисної моделі, реалізованої в колісно-гусенично-колісному комбінованому ґрунтообробномупосівному технологічному засобі є розширення функціональних можливостей та області застосування, спрощення функціонування комплексу, підняття економічних показників, надійності, масогабаритних і енергетичних характеристик, створення комфортних умов роботи експлуатаційному персоналу та рішення питань природозбереження. Поставлена задача вирішується тим, що в способі модульного формування машинно-тракторного комплексу послідовно з'єднують силовий модуль та активний технологічний модуль у складі потужного силового агрегату і робочого органу, об'єднаних в єдине ціле, модуль керування оснащують колісним, а силовий агрегат гусеничним рушіями, при цьому забезпечують величину опорного тиску рушіїв на ґрунт за умови мінімального екологічного впливу, який відрізняється тим, що елементи технологічного модуля додатково оснащують колісною пасивною ходовою системою, яку використовують при транспортуванні комплексу по шляхах загального призначення, зміні робочих місць та в місцях циклічної зміни напрямків ґрунтообробки, тиск колісних рушіїв технологічного модуля на опорну поверхню ґрунту задають рівним нормативному для переміщення важкої транспортної техніки по шляхах загального призначення, а роботу двигуна технологічного модуля задають, в моменти виконання ґрунтообробки, відповідним полиці постійної потужності та при його введені в роботу використовують системи модуля керування. Завдяки новим операціям пропонованої корисної моделі досягнуто підняття економічних і екологічних показників за рахунок підвищення використання дорогих засобів, розширення області використання, транспортної оперативності, оптимізації масогабаритних характеристик комплексу. Порівняльний аналіз запропонованого технічного рішення з відомим рівнем техніки не виявив впливу відомих рішень на досягнення позитивного результату згідно поставленої задачі. Таким чином дане технічне рішення відповідає вимогам корисності і новизни, є імпортозаміщуючою розробкою призначеною для використання у промисловості, здійснене за допомогою існуючих комплектуючих і матеріалів, а також визнаних науково обґрунтованих методів і галузевих нормативів та при реалізації комплексу в умовах Харківського тракторного заводу і польових випробуваннях було досягнуто практичного результату, чим виконано вимоги промислової придатності які вбачав автор. Суть корисної моделі пояснюється малюнком та опис взаємодії її складових елементів. До складу корисної моделі входять керуючий модуль 1 з колісним рушієм 2, силовий агрегат 3 з гусеничним рушієм 4, робочий орган 5 (на прикладі багатолемішного плуга). Силовий агрегат 3 та робочий орган 5 складають технологічний модуль 6. Керуючий модуль 1, агрегат 3 і робочий орган 5 з'єднані між собою механічними засобами відповідно 7 та 8. Технологічний модуль 6 додатково оснащено пасивною колісною ходовою системою: агрегат 3 - рушієм 9, робочий орган 5 - рушієм 10. Запуск двигуна агрегату 3 виконують з допомогою електричної (або пневматичної) системи 11 модуля 1, а зміну транспортного режиму модуля 6 на робочий режим і навпаки виконують з допомогою гідросистеми 12 модуля 1. В реальних умовах для наробки корисної моделі в якості модуля 1 використано колісний трактор МТЗ-82; в свою чергу конструкція агрегату 3 включає в себе ходову систему гусеничного трактора Т-150 з узгоджуючим редуктором та двигун з лише власними забезпечуючими системами (паливна, охолодження, змащуюча, тощо); в якості робочого органу 5 використано плуг ПЛН-6-40-02; ширина комплексу не перевищує 2,1м. Модуль 1 в комплексі є керуючим і звичайним серійним відносно малопотужним колісним (як правило) трактором - без суттєвих доробок. На відміну від агрегату 3 модуль 1 має трансмісію із значним діапазоном передавальних відношень. Його використання в складі сформованого комплексу дозволяє на окремих ґрунтах компенсувати недостатню потужність модуля 6, також задавати комплексу напрямок руху в транспортному і робочому режимах, виконувати керування режимами систем комплексу (електричної, пневматичної, гідравлічної). Узгоджувальний редуктор агрегату 3 забезпечує рух останнього в робочому режимі і має інтервал швидкостей 7-9км/год та не більше двох передач і нейтраль. Гусеничний рушій 4 в складі агрегату 3 взято за умови більшого тягового коефіцієнта корисної дії та простішого машинобудівного виконання обмежень екологічного впливу на ґрунт. В свою чергу перехід із транспортного режиму комплексу в робочий (і навпаки) відбувається з підняттям (опусканням) рушіїв 9, 10 модуля 6 і виключає необхідність використання в складі агрегату 3 муфти зчеплення. Тобто відсутність в агрегаті 3 муфти зчеплення, кабіни, власних гідро-пневмо-електросистем, рульового керування, повної системи контролю режимів двигуна опосередковано вдвічі зменшили вартість модуля, також його масу. Додатково останнє досягнуто створенням моноблока з елементів 3 і 5 що дозволило досягти економії матеріалів, та як слідство, спростити рішення питання екологічного впливу, та ґрунтозбереження. Крім того, відсутність вала відбирання потужності виключило кінематичний зв'язок елементів 3 і 1, а відповідно робота двигуна агрегату 3 в режимі наведеної полиці - паразитне перетікання потужностей; відокремлення машиніста від потужного агрегату зняло обмеження в частині його параметрів по шуму і вібрації і надало комфортності в роботі. Комплекс працює таким чином. При підготовці його до транспортування запускають двигун модуля 1 і за допомогою системи гідравліки 12 рушії 9 і 10 вводять в контакт з проїжджою частиною; при цьому двигун модуля 6 (агрегату 3) не працює, а власне модуль 6 знаходиться в піднятому стані. В такому вигляді комплекс тяговим зусиллям модуля 1 транспортують до місця виконання роботи. При під'їзді до вказаного запускають двигун з допомогою системи 11 агрегату 3 - відбувається його попереднє прогрівання. Робота двигуна, узгоджувального редуктора і гусеничного рушія 4 агрегату 3 при цьому виконується в режимі холостого хода. Для початку ґрунтообробки водій модуля 1 за допомогою гідросистеми 12 переводе технологічний модуль 6 в робочий режим - при цьому виникає плавний контакт ґрунту з рушієм 4 і ґрунтооброблюючих елементів робочого органу 5. Йде процес ґрунтообробки. В кінці гону за допомогою системи 12 шляхом впливу на рушії 9, 10 комплекс переводять в транспортний режим - відбувається циклічний розворот (реверс) комплексу. Після чого комплекс повертають в робочий режим і продовжують у зворотному напрямі процес ґрунтообробки. По закінченню обробки даного поля комплекс аналогічно переводять в транспортний режим і оперативно транспортують до нового місця роботи або місця зберігання. Таким чином вказане у сукупності дозволило вирішити поставлену задачу відповідності створеного машинобудівного комплексу базі вихідних даних і нормативних обмежень та досягти новизни, корисності і промислової придатності. Джерела інформації: 1. П.П. Тодоров и др. Обоснование необходимости комплексного подхода к созданию комбинированных машинно-тракторных агрегатов. Автомобильный транспорт. Сборник научных трудов Харьковского автомобильно-дорожного университета. Харьков, 2003, с. 110-112. 2. Рекламний проспект фірми Atlas Сорсо (Швеція). Remote - controlled demolition equipment. Brokk 250. E-mail: vde@atlascopco.com, 2006. 3. А.Д. Табарин и др. Новый карьерный экскаватор фирмы «ОМЗ Горное оборудование и технологии», Горный журнал, 2005, №8, с.118-121. 4. SU 1487807 В62Д 13/00, 15.08.1989, Бюл. №22. 5. В.В. Коцыгин и др. Перспективные мобильные энергетические средства (МЭС) для сельскохозяйственного производства. - Мн. Наука и Техника, 1982. 6. SU 1391983 В62Д 59/02, 30.04.1988, Бюл. №16.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of modular formation of machine-and-tractor complex
Автори англійськоюTretiak Viktor Mykhailovych
Назва патенту російськоюСпособ модульного формирования машинно-тракторного комплекса
Автори російськоюТретяк Виктор Михайлович
МПК / Мітки
МПК: B62D 59/00
Мітки: модульного, формування, машинно-тракторного, комплексу, спосіб
Код посилання
<a href="https://ua.patents.su/3-22413-sposib-modulnogo-formuvannya-mashinno-traktornogo-kompleksu.html" target="_blank" rel="follow" title="База патентів України">Спосіб модульного формування машинно-тракторного комплексу</a>
Спосіб стабілізації прямолінійного руху машинно-тракторного агрегату
Номер патенту: 24282
Опубліковано: 07.07.1998
Автори: Надикто Володимир Трохимович, Савенко Петро Степанович
МПК: A01B 69/00
Мітки: машинно-тракторного, руху, агрегату, стабілізації, прямолінійного, спосіб
Формула / Реферат:
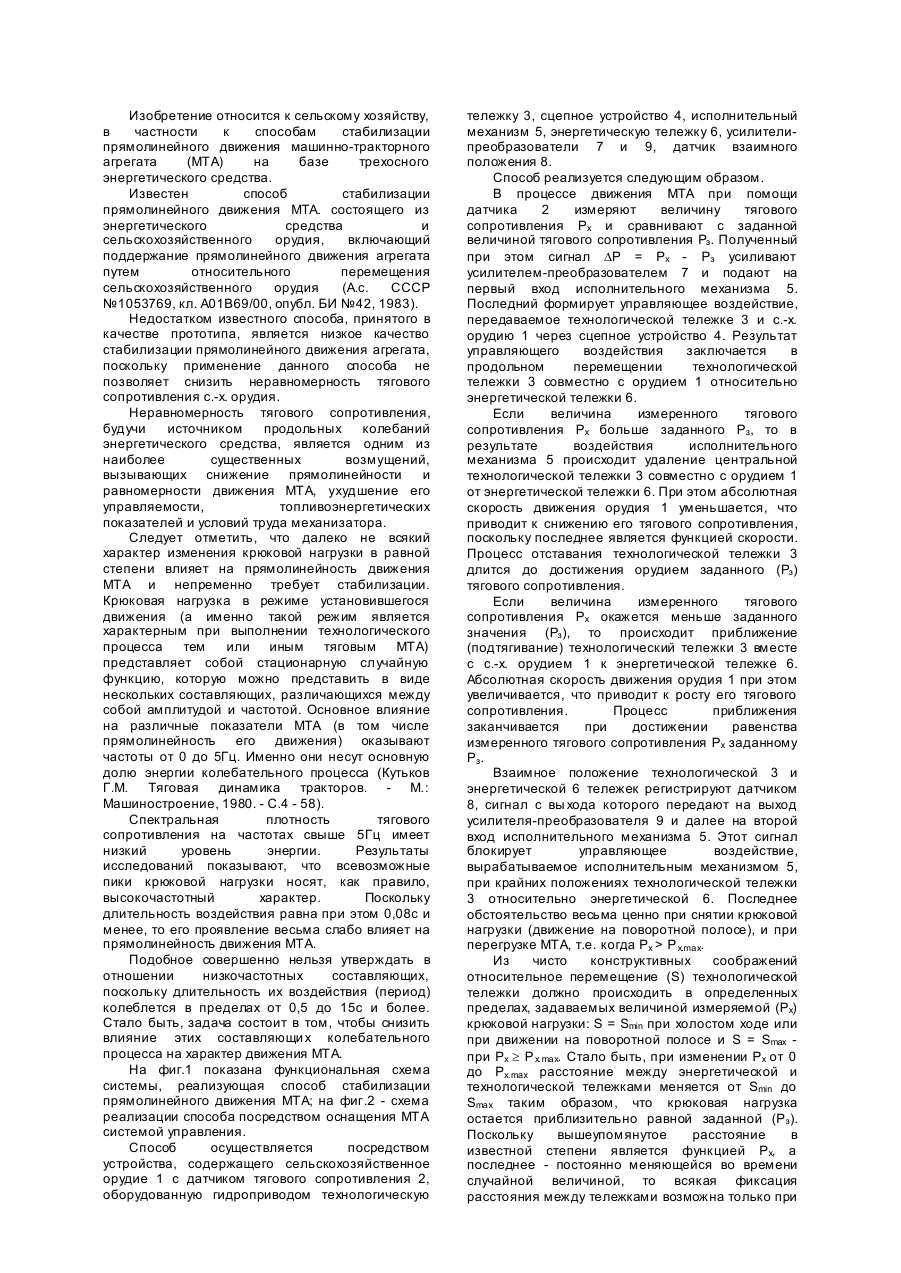
Способ стабилизации прямолинейного движения машинно-тракторного агрегата, состоящего с энергетической и, соединенной с сельскохозяйственным орудием, технологической тележек, включающий поддержание прямолинейного движения агрегата путем относительного перемещения сельскохозяйственного орудия, отличающийся тем, что непрерывно измеряют тяговое сопротивление сельскохозяйственного орудия и, в зависимости от его полученного значения, изменяют...
Пристрій для автоводіння машинно-тракторного агрегата
Номер патенту: 26861
Опубліковано: 29.12.1999
Автори: Лободко Микола Миколайович, Адамчук Валерій Васильович, Козлов Володимир Петрович, Мироненко Валентин Григорович, Пенцан Олег Дмитрович, Погорілий Віктор Васильович
МПК: A01B 69/04
Мітки: автоводіння, машинно-тракторного, пристрій, агрегата
Формула / Реферат:
1. Устройство для автовождения машинно-тракторного агрегата, содержащее подключенные соответственно к первому и второму входам вычислительного устройства гироскопический датчик курсового рассогласования и датчик положения направляющих колес, механизм управления повоторoм направляющих колес, соединенный с выходом вычислительного устройства, отличающееся тем, чтооноснабженодатчикомпроиденногопути,выход которого соединен с третьим...
Спосіб формування доступу до поверхневого м’язово-апоневротичного комплексу
Номер патенту: 17794
Опубліковано: 16.10.2006
Автор: Харьков Андрій Леонідович
МПК: A61B 17/04
Мітки: формування, поверхневого, м'язово-апоневротичного, комплексу, спосіб, доступу
Формула / Реферат:
Спосіб формування доступу до поверхневого м'язово-апоневротичного комплексу, що включає виконання фігурного розтину вертикально у волосяній частині скроневої ділянки до рівня передньої частини завитка вуха, спереду від вуха по контуру раковини до рівня мочки, потім в обхід мочки по краю задньої поверхні вушної раковини до її верхньої третини, горизонтально у напрямку тильної ділянки та відсепарування шкірно-жирового клаптя щоки, який...
Спосіб визначення швидкості руху тракторного агрегату для транспортування плодів
Номер патенту: 53358
Опубліковано: 15.01.2003
Автори: Шевчук Роман Степанович, Миронюк Олег Сергійович, Паславський Ростислав Ігорович
МПК: A01D 90/00
Мітки: агрегату, швидкості, транспортування, тракторного, визначення, спосіб, руху, плодів
Формула / Реферат:
Спосіб визначення швидкості руху тракторного агрегату для транспортування плодів, що включає встановлення швидкості руху за умовами максимальної продуктивності перевезень і допустимих коливань на робочому місці тракториста-машиніста, який відрізняється тим, що додатково встановлюють швидкість руху за умовою допустимих коливань на робочій платформі агрегатованого з трактором причепа, а експлуатаційну швидкість руху агрегату вибирають як...
Спосіб виготовлення контейнера для сховищ модульного типу
Номер патенту: 70529
Опубліковано: 15.01.2007
Автори: Межуєв Микола Миколайович, Ткаченко Володимир Іванович, Кабардін Микола Костянтинович, Якушкін Михайло Олександрович, Алексєєв Юрій Сергійович, Крикун Юрій Олександрович, Романов Олександр Андрійович, Джур Євген Олексійович, Кучма Леонід Данилович, Удод Володимир Володимирович
МПК: G21F 5/00
Мітки: виготовлення, спосіб, типу, сховищ, контейнера, модульного
Формула / Реферат:
1. Спосіб виготовлення контейнера для сховищ модульного типу, при якому використовують паливний ракетний бак, що включає корпус, який складається з зовнішньої циліндричної оболонки і внутрішньої оболонки у вигляді "кокона", навитих з полімерного матеріалу, днище і кришку, який відрізняється тим, що на корпусі зрізують верхню частину "кокона", на нижній частині "кокона" закріплюють днище, а як опорну поверхню для...
Попередній патент: Спосіб ліпідокорекції у хворих із сполученою патологією
Наступний патент: Пристрій для бужування ригідних стриктур стравоходу
Випадковий патент: Гвинтовий конвеєр