Пристрій для управління електроприводом верстата або конвейєра
Номер патенту: 24399
Опубліковано: 17.07.1998
Автори: Латишев Борис Георгійович, Худяков Геннадій Андрійович

Формула / Реферат
Устройство для управления электроприводом станка или конвейера, содержащее датчики исходного положения, подключенные к входам первого элемента И, второй элемент И, первый вход которого соединен с выходом первого элемента НЕ, а выход - с первым входом элемента ИЛИ, второй элемент НЕ, выход которого соединен с первым входом третьего элемента И, четвертый элемент И, первый и второй усилители и элемент задержки времени, отличающееся тем, что в него введены третий элемент НЕ и пятый элемент И, причем выход элемента ИЛИ соединен с первым входом четвертого элемента И, выход которого соединен с вторыми входами второго и третьего элементов И, выход третьего элемента И подключен к входу второго усилителя, через третий элемент НЕ и через элемент задержки времени соответственно к первому и второму входам пятого элемента И, третий вход которого соединен с выходом первого элемента И и с входом первого элемента НЕ, а выход соединен с входами второго элемента НЕ и первого усилителя, вторые входы элемента ИЛИ и четвертого элемента И являются входами устройства, а выходы первого элемента И, третьего элемента НЕ, первого и второго усилителей являются выходами устройства.
Текст
Изобретение относится к устройствам дистанционного управления электроприводами станков или конвейеров, имеющих позиции или спутники, предназначенных для транспортирования и точного позиционирования изделий для обработки или сборки изделий агрегатами или станками, расположенными вдоль траектории движения изделий, и может быть использовано в различных отраслях промышленности. Наиболее близким по технической сущности к заявляемому является устройство для управления реверсивным электроприводом (А.с. СССР №540257, кл. G05B19/04, 24.12.74). Устройство содержит первый и второй датчики исходного положения объекта управления, прямые выходы которых соединены с первыми входами соответственно первого и второго элементов И, вторые входы которых соединены с шиной запуска, третий и четвертый элементы И, первый и второй элементы ИЛИ, первый и второй блоки задержки, первый и второй инверторы, первый и второй усилители, инверсные выходы датчиков конечного положения объекта управления соединены с соответствующими входами третьего и четвертого элементов И, входы первого элемента ИЛИ соединены с выходами первого и третьего элементов И, а выход через первый блок задержки соединен с входами первого усилителя и второго инвертора, выход которого соединен с третьим входом четвертого элемента И, выход которого соединен с одним их входов второго элемента ИЛИ, другой вход которого соединен с выходом второго элемента И, а выход через второй блок задержки соединен со вторым усилителем и первым инвертором, выход которого соединен с третьим входом третьего элемента И. Однако это устройство вырабатывает сигнал на торможение электропривода с задержкой времени, поэтому останов станка или конвейера не является мгновенным. Это затрудняет точное позиционирование обрабатываемых деталей или собираемых изделий. Кроме того устройство не содержит элементы обеспечивающие невозможность запуска в работу электропривода во время обработки или сборки изделий, не формирует сигналы разрешающие или запрещающие работу механизмов, обеспечивающих обработку или сборку изделий. В основу изобретения поставлена задача создать устройство дли управления электроприводом, которое путем введения новых элементов и связей, позволило бы обеспечить мгновенный останов станка или конвейера и запрещение работы электропривода во время обработки или сборки изделий, а также невозможность работы рабочих органов станка или конвейера во время работы электропривода. Сущность изобретения заключается в том, что в устройство, содержащее датчики исходного положения станка или конвейера, подключенные к входам первого элемента И, второй элемент И, первый вход которого соединен с выходом первого элемента НЕ, а выход - с первым входом элемента ИЛИ, второй элемент НЕ, вы ход которого соединен с первым входом третьего элемента И, четвертый элемент И, первый и второй усилители и элемент задержки времени, в отличие от прототипа, введены третий элемент НЕ и пятый элемент И, причем выход элемента ИЛИ соединен с первым входом четвертого элемента И, выход которого соединен со вторыми входами второго и третьего элементов И, выход третьего элемента И подключен к входу второго усилителя, через третий элемент НЕ и через элемент задержки времени соответственно к первому и второму входам пятого элемента И, третий вход которого соединен с выходом первого элемента И и с входом первого элемента НЕ, а выход соединен с входами второго элемента НЕ и первого усилителя, вторые входы элемента ИЛИ и четвертого элемента И являются входами устройства, а вы ходы первого элемента И, третьего элемента НЕ, первого и второго усилителей являются выходами устройства. За счет введения в схему элементов И, НЕ и дополнительных связей между элементами устройства достигается мгновенный останов электропривода станка или конвейера и формируются блокировочные сигналы на электропривод и рабочие органы, выполняющие обработку или сборку изделий. Этим самим достигается возможность работы рабочих органов только при неподвижном конвейере или транспортирующем узле станка и движения транспортера или транспортирующего узла станка во время нахождения рабочих органов в исходном положении. На чертеже (фиг.) изображена схема устройства. Устройство содержит датчики 1, 2 исходного положения станка, элементы 3, 4, 5, 6 и 7 И, элемент 8 ИЛИ, элементы 9, 10 и 11 НЕ, элемент 12 задержки времени, усилители 13 и 14. На рисунке изображены также станок 15, снабженный поворотным столом 16 для транспортирования обрабатываемых изделий, рабочие органы 17, совершающие обработку изделий, электропривод 18 станка 15, тормозное устройство 19, система 20 управления рабочими органами 17, включающая в себя формирователь 21 запускающих импульсов, связанный с пусковым устройством 22. Датчики 1 и 2 подключены к входам элемента 3И, выход которого подключен к первым входам элемента 7И и системы 20 управления рабочими органами 17 станка 15 и через элемент 9НЕ к первому входу элемента 5И. Выход элемента 5И подключен к первому входу элемента 8ИЛИ, а второй вход соединен с выходом элемента 4И и с первым входом элемента 6И. Первый вход элемента 4И соединен с выходом элемента 8ИЛИ. Выход элемента 6И соединен через усилитель 13 с электродвигателем 18 станка 15, через элемент 10НЕ с вторым, а через элемент задержки времени с третьими входами элемента 7И. Выход элемента 7И соединен через усилитель 14 с тормозным устройством 19 и через элемент 11НЕ с вторым входом элемента 6И. Выход элемента 10НЕ подключен к второму входу системы 20 управления. Блокирующий выход системы 20 управления подключен к второму входу элемента 4И, а формирователь 21 импульсов к второму входу элемента 8ИЛИ. К входу формирователя 21 импульсов подключено пусковое устройство 22. Устройство работает следующим образом. В исходном положении станка 15 датчики 1 и 2 нажаты и их выходные сигналы присутствуют на входа х элемента 3И. Элемент 3И осуществляет логическое перемножение этих сигналов и выдает сигнал исходною положения поворотного стола 16 в систему 20 управления станком 15. В систему 20 подаются также сигнал о выключенном электродвигателе 18 с выхода элемента 10НЕ и сигналы исходного положения рабочих органов 17 станка 15. Система 20 управления формирует и подает на второй вход элемента 4И блокировочный сигнал. В состав блокировочного сигнала входят сигналы исходного положения тех рабочих органов, которые находясь не в исходном положении, препятствуют повороту стола 16. Включается станок 15 в работу п усковым устройством 22. Сигнал с выхода пускового устройства 22 подается в формирователь 21 импульсов системы управления 20, который формирует запускающий сигнал и подает его через элемент 8ИЛИ на первый вход элемента 4И. Элемент 4И срабатывает и его выходной сигнал подается на второй вход элемента 5И и на первый вход элемента 6И, на втором входе которого уже присутствуе т сигнал с выхода элемента 11НЕ. Элемент 6И срабатывает и его выходной сигнал подается на вход элемента 12 задержки времени, на вход элемента 10НЕ, выходной сигнал (электродвигатель выключен) которого пропадает, и через усилитель 13 на электродвигатель 18. Электродвигатель 18 включается и стол 16 начинает поворачиваться. Датчики 1 и 2 освобождаются и сигналы с их выходов пропадают. Пропадает сигнал исходного положения стола 16 с выхода элемента 3И и формирователь 21 импульсов прерывает запускающий сигнал. На выходе элемента 9НЕ появляется сигнал, который подается на первый вход элемента 5И. Элемент 5И срабатывает и его выходной сигнал через элемент 8ИЛИ подается на первый вход элемента 4И, заменяя собой запускающий сигнал. После поворота стола 16 срабатывают датчики 1 и 2. На выходе элемента 3И появляется сигнал исходного положения стола 16, который подается на первый вход элемента 7И и в систему 20 управления. На выходе элемента 9НЕ сигнал пропадает и, следовательно, пропадают сигналы на выходах элементов 5И, 8 ИЛИ, 4И, 6И и усилителя 13. Электродвигатель 18 выключается. На выходе элемента 10НЕ появляется сигнал - "Электродвигатель выключен", который подается на второй вход элемента 7И, а элемент 12 задержки включается и начинает отсчет времени. Элемент 7И срабатывает и его выходной сигнал через усилитель 14 включает тормозное устройство 19. Через время t, необходимое для торможения электродвигателя 18, сигнал с выхода элемента 12 задержки пропадает и, следовательно, пропадает сигнал с выходов элемента 7И и усилителя 14. Тормозное устройство 19 отключается. Система 20 управления с учетом сигнала исходного положения стола 16 (с выхода элемента 3И) и сигнала выключенного электродвигателя 18 (с выхода элемента 10НЕ) формирует команды на включение рабочих органов 17 в работу. Рабочие органы 17 срабатывают, сигналы их исходного положения и, следовательно, блокировочный сигнал с второго входа элемента 4И пропадают. Отсутствие блокировочного сигнала исключает включение поворотного стола 16 в работу при работающих рабочих органах 17. В то же время отсутствие в командах на включение рабочих органов 17 в работу сигналов исходного положения стола 16 и выключенного электродвигателя 18 исключает включение рабочих органов 17 в работу во время поворота стола 16. После того. как рабочие органы 17 закончат работу и вернутся в исходное положение, система 20 управления формирует блокировочный сигнал и устройство управления по сигналу, поступающему с выхода пускового устройства 22, повторит цикл работы.
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 19/04
Мітки: управління, електроприводом, пристрій, верстата, конвейєра
Код посилання
<a href="https://ua.patents.su/3-24399-pristrijj-dlya-upravlinnya-elektroprivodom-verstata-abo-konvejjehra.html" target="_blank" rel="follow" title="База патентів України">Пристрій для управління електроприводом верстата або конвейєра</a>
Тірісторний пристрій для управління та захисту електромагнітної муфти привода гірничої машини
Номер патенту: 7611
Опубліковано: 29.09.1995
Автори: Дубінін Сергій Васильович, Сидоренко Іван Тимофійович, Кривущенко Микола Тимофійович, Мальцев Леонід Єгорович, Гринь Костянтин Афанасійович
МПК: E21C 35/24
Мітки: електромагнітної, пристрій, гірничої, захисту, привода, муфти, управління, тиристорний, машини
Формула / Реферат:
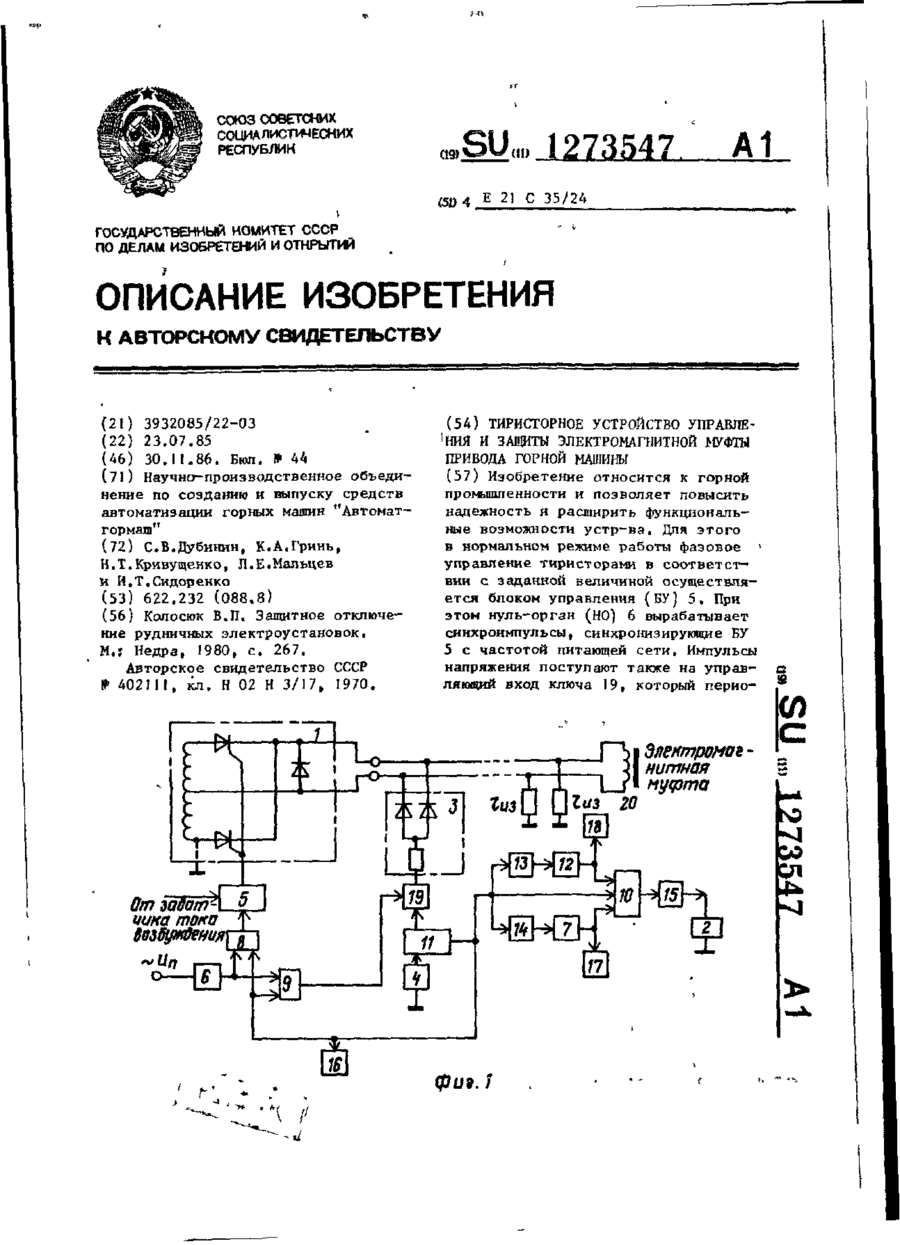
Тиристорнеє устройство управлений и защиты электромагнитной муфты привода горной машины, содержащее источник переменного напряжения, источник постоянного напряжения, первый фильтр, электромагнитное реле, блок управления тиристорами, выход которого связан с управляющим входом тиристорного выпрямителя, выходные клеммы которого подключены к нагрузке, отличающееся тем, что, с целью повышения надежности и расширения функциональных возможностей...
Пристрій для керування частотно-регулівним електроприводом
Номер патенту: 8822
Опубліковано: 30.09.1996
Автори: Грінченко Олександр Семенович, Волков Олександр Васильович
МПК: H02P 27/04
Мітки: пристрій, частотно-регулівним, електроприводом, керування
Формула / Реферат:
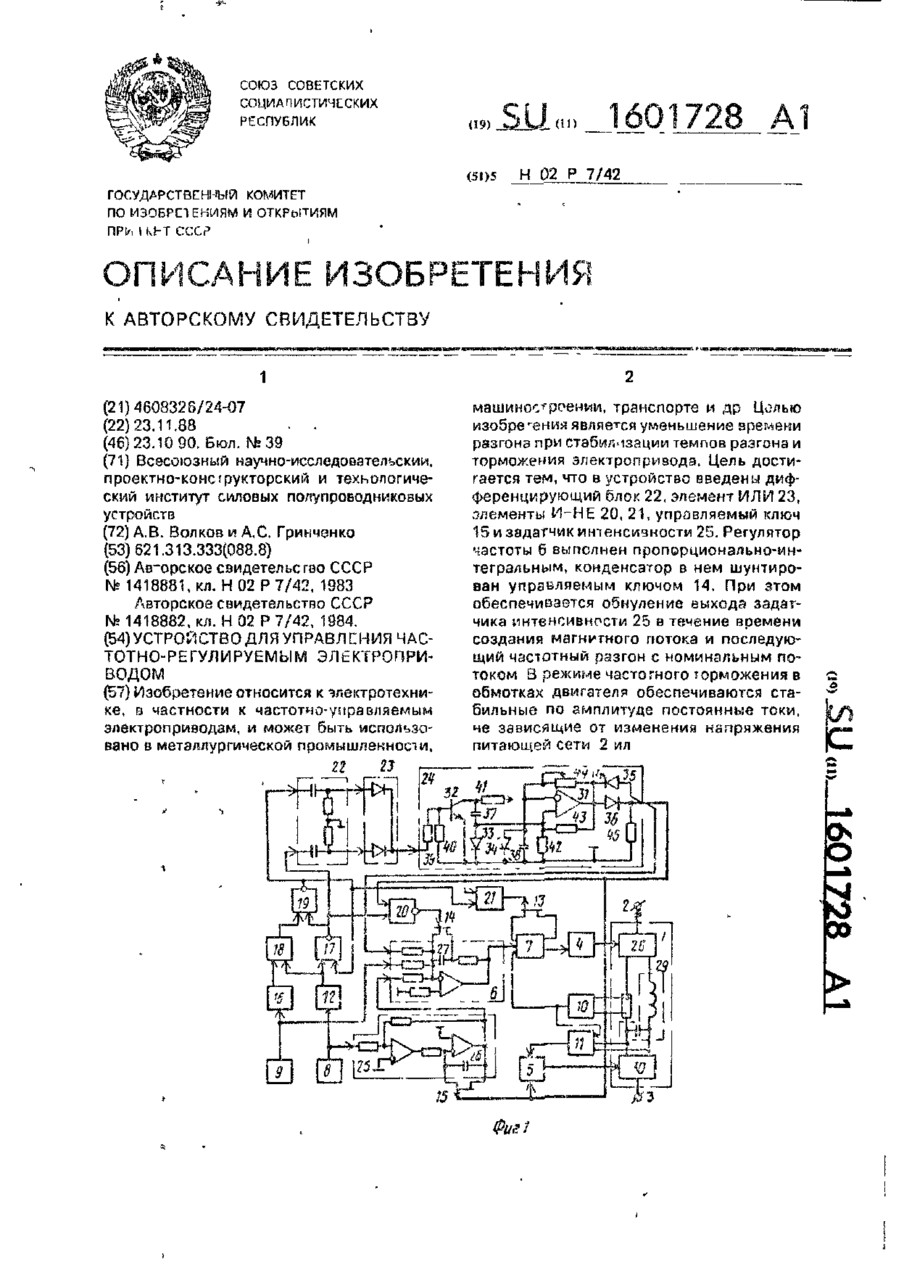
Устройство для управления частотно-регулируемым электроприводом, содержащее статический преобразователь частоты, снабженный клеммами для подключения питающей сети и асинхронного двигателя, системы управления напряжением и частотой, подключенные выходами к соответствующим управляющим входам статического преобразователя частоты, регулятор частоты и регулятора тока, каждый с двумя входами, узел задания, датчик частоты вращения, датчики тока...
Пристрій автоматичного управління виїмковою машиною
Номер патенту: 7597
Опубліковано: 29.09.1995
Автори: Бакуменко Володимир Степанович, Кіріченко Костянтин Іванович, Клименко Володимир Іванович, Захаров Володимир Миколаєвич, Сірченко Володимир Миколайович
МПК: E21C 35/24
Мітки: виїмковою, машиною, управління, автоматичного, пристрій
Формула / Реферат:
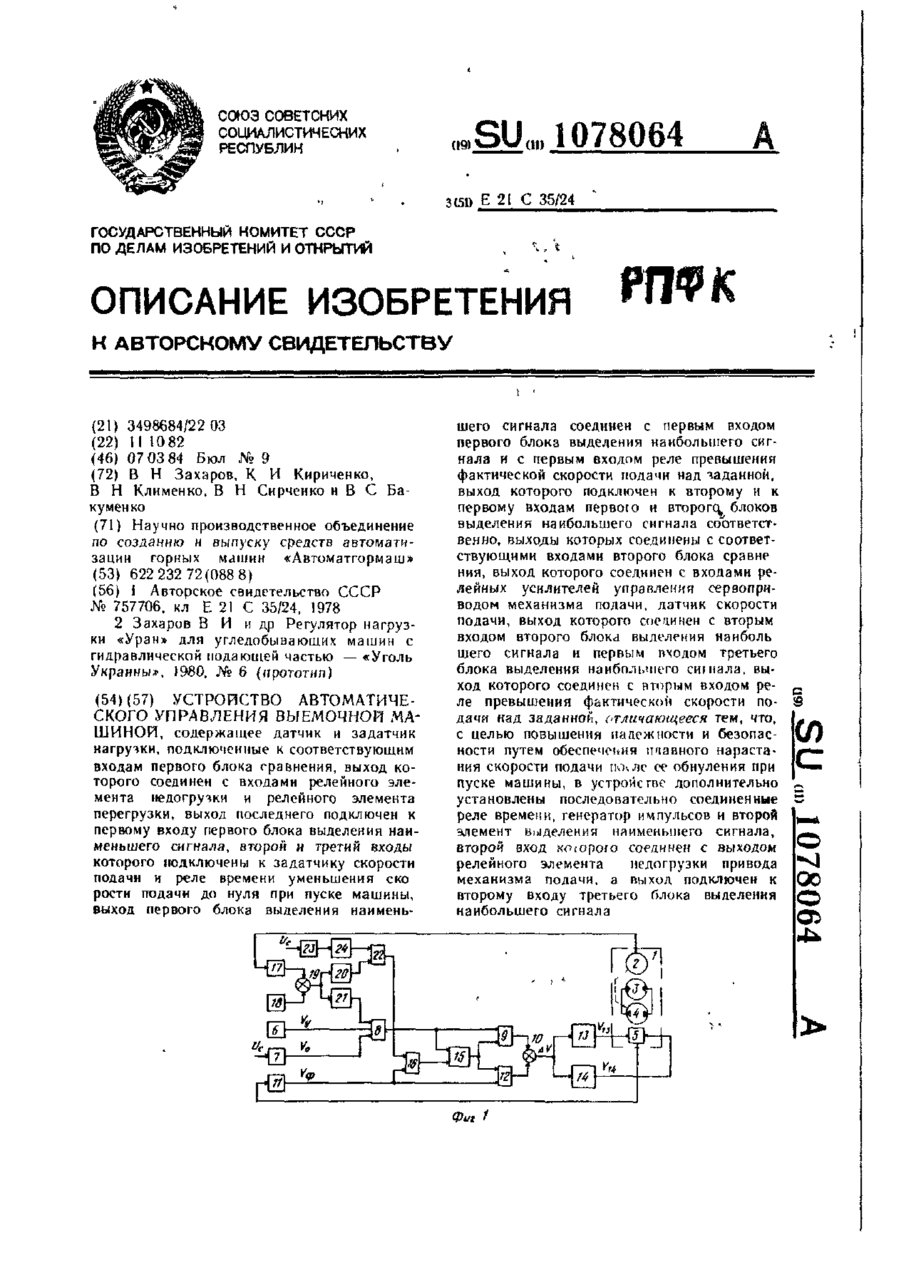
Устройство автоматического управления выемочной машиной, содержащее датчик и задатчик нагрузки, подключенные к соответствующим входам первого блока сравнения, выход которого соединен с входами релейного элемента недогрузки и релейного элемента перегрузки, выход последнего подключен к первому входу первого блока выделения наименьшего сигнала, второй и третий входы которого подключены к задатчику скорости подачи и реле времени уменьшения...
Пристрій автоматичного управління виїмкової машини
Номер патенту: 7573
Опубліковано: 29.09.1995
Автори: Жданов Костянтин Федорович, Сілаєв Віктор Іванович, Сірченко Володимир Миколаєвич, Поволоцький Сергій Олександрович
МПК: E21C 35/24
Мітки: управління, автоматичного, виїмкової, пристрій, машини
Формула / Реферат:
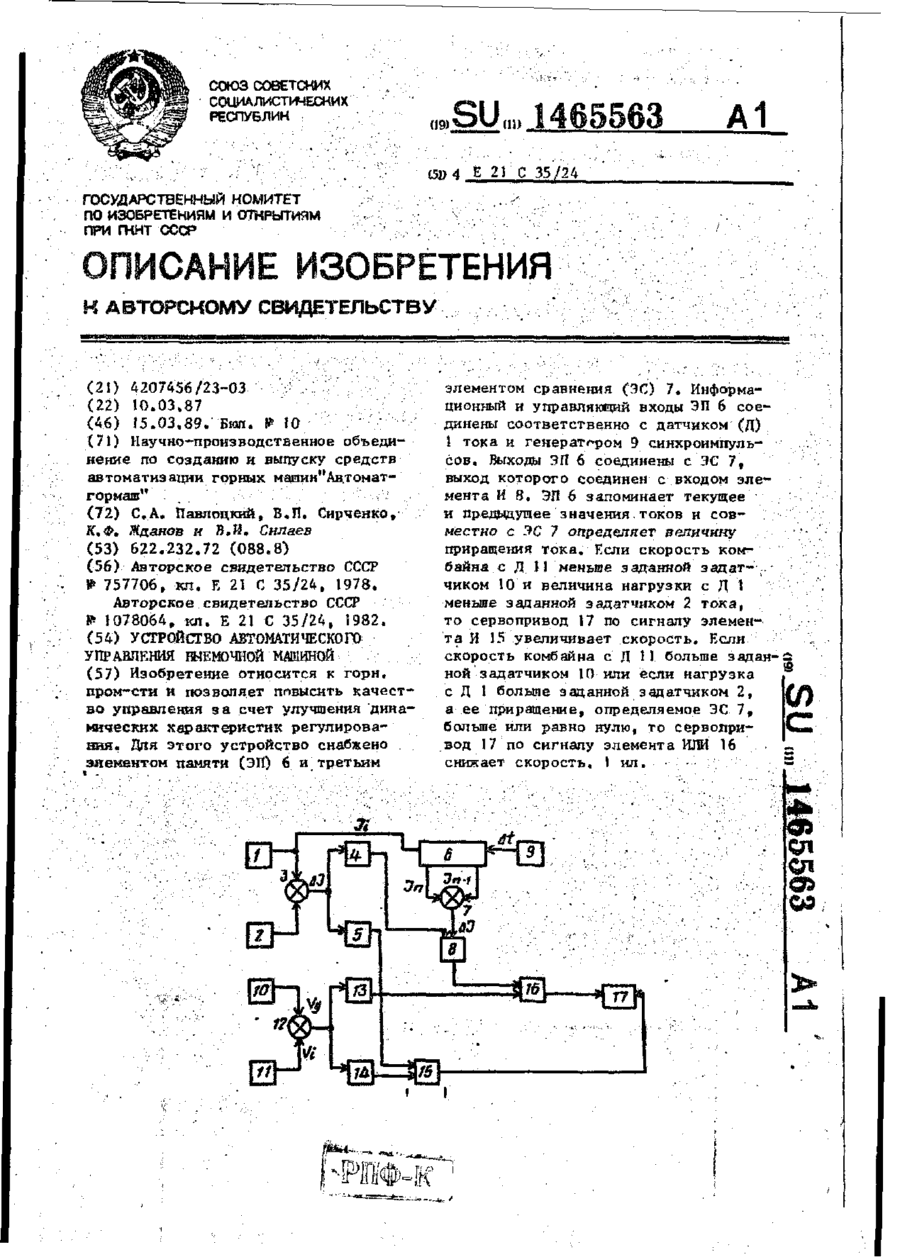
Устройство автоматического управления выемочной машиной, содержащее датчик и задатчик тока, соединенные с первым элементом сравнения, выход которого через первый и второй пороговые элементы соединен с первыми входами соответственно первого и второго элементов И, датчик и задатчик скорости, соединенные с вторым элементом сравнения, выход которого через третий и четвертый пороговые элементы соединен соответственно с вторым входом второго...
Устрій до управління електроприводом зміного струму
Номер патенту: 8585
Опубліковано: 30.09.1996
Автори: Епштейн Ісаак Ізраільович, Бару Олександр Юріьович, Богатирев Вадим Павлович
МПК: H02P 27/04
Мітки: управління, устрій, струму, зміного, електроприводом
Формула / Реферат:
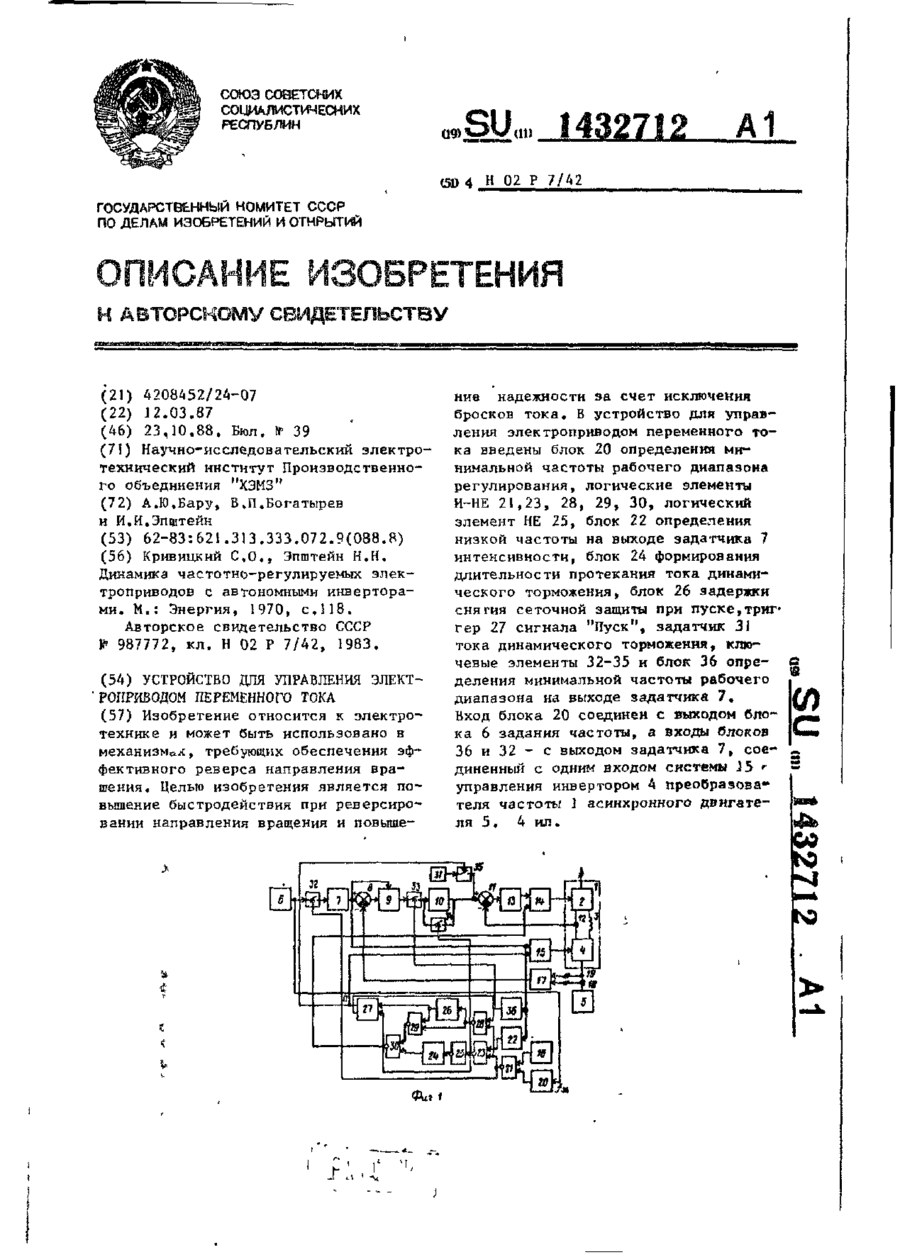
Устройство для управления электроприводом переменного тока, содержащее преобразователь частоты, составленный из последовательно соединенных управляемого выпрямителя, дросселя и автономного инвертора тока с выходом для подключения к группе асинхронных короткозамкнутых двигателей, блок задания частоты, задатчик интенсивности, выход которого подключен к первому входу первого блока суммирования, блок деления, вход делимого которого подключен...
Попередній патент: Частотний датчик кутової швидкості
Наступний патент: Пристрій для приготування та роздачі рідкого металу
Випадковий патент: Магнітний рейковий дефектоскоп