Спосіб розпізнавання аеродинамічних гвинтомоторних об’єктів, які низько літають
Номер патенту: 25466
Опубліковано: 30.10.1998
Автори: Палаєв Сергій Васильович, Баранов Олександр Миколаєвич
Формула / Реферат
Способ распознавания низколетящих аэродинамических винтомоторных объектов, основанный на полосовой фильтрации, усилении гидроакустического шумоизлучения, выделении огибающей, спектральном разложении, корреляционной обработке огибающей, выделении парциальных коэффициентов модуляции по измеренным среднеквадратичным уровням дискретных составляющих огибающей, отличающийся тем, что излучают непрерывный тональный зондирующий радиосигнал, принимают отраженный от лопастей вертолета сигнал, выделяют огибающую этого сигнала и ее спектр, сравнивают комплексные спектры огибающих шумоизлучения и отраженного радиолокационного сигнала на корреляционном уровне, выделяют как информативные признаки крутизну спада и частоту осцилляции корреляционной функции, формируют мультипликативную взаимокорреляционную функцию амплитудных спектров огибающих, на основе сравнения полученных корреляционных максимумов с порогом определяют их количество и положение на оси допплеровских сжатий формируют допплеровские траектории скоростей движения вращающихся лопастей, оценивают динамику изменения допплеровских параметров и по наличию допплеровской модуляции, частотам модуляции и динамике изменения допплеровских параметров принимают решение о классе объекта.
Текст
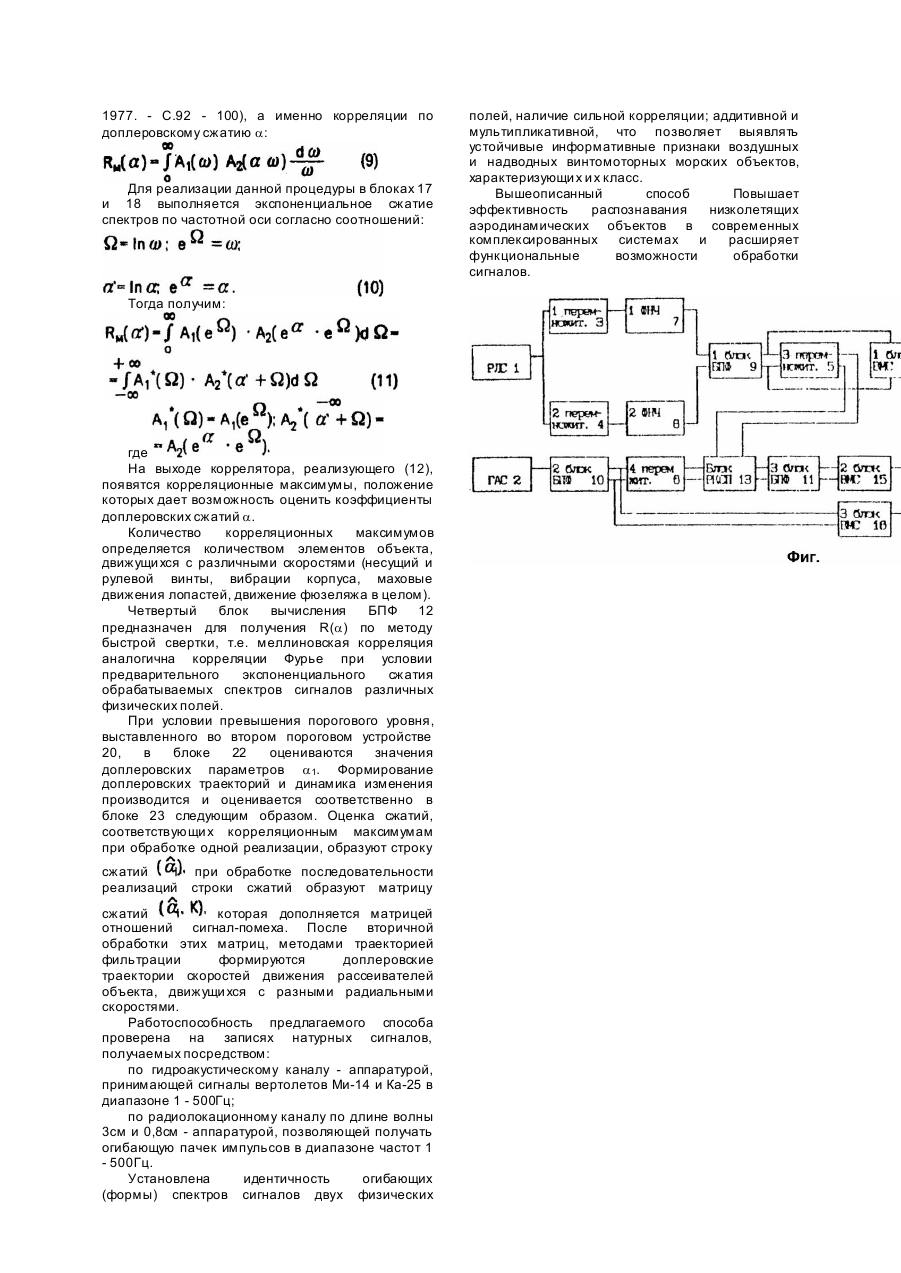
Изобретение относится к области измерения физических величин, а более конкретно к способам распознавания временных рядов в шумах и системах спектральной и совместной корреляционной обработки информации с датчиков различной физической природы. Известны радио- и гидролокационные способы обнаружения, оценки параметров движения и классификации воздушных и подводных объектов с колеблющимися (вращающимися) элементами конструкции (поверхности объекта) (Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984. - 152с.). Показано, что спектры сигналов, отраженных таким сложным объектом, содержит динамические доплеровские составляющие от вращающихся частей этого объекта (самолета, вертолета, пловца, птиц): лопаток реактивных турбин или винтов, ласт пловца, крыльев птиц, и непрерывный спектр, обусловленный движением всего объекта с определенной радиальной скоростью. При этом среднюю скорость вращения (колебаний) можно определить, подсчитав, сколько раз за данный промежуток времени величина доплеровских сигналов достигает максимума (Бладель В. Электромагнитные поля в присутствии вращающи хся тел // ТИИЭР. - Т.64. - №3. - 1976. С.14 - 34). Непрерывный спектр, обусловленный движением самолета с радиальной скоростью располагается по обе стороны от средней доплеровской частоты Fд, и ширина спектра составляет 5 - 40Гц. Расширение спектра вызывается случайными перемещениями объекта, включающими рыскания, а также изменения углов крена и тангажа, которые вызывают, в свою очередь, вращение искаженного фазового фронта электромагнитной волны, отражаемого объекта (Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984. - 152с.). Известны способы обработки широкополосных сигналов, включающие прием сигналов пространственно-избирательными каналами, взаимокорреляционную обработку принятых сигналов, фиксирование наибольшего уровня угла ориентации характеристики направленности (Заявка СССР №2258597, кл. G01S3/80, 11.06.79). Наиболее близким техническим решением к предлагаемому способу является способ обработки огибающей модулированных сигналов, основанный на полосовой фильтрации, усилении, выделении огибающей, спектральном разложении, корреляционной обработки огибающей, выделении порциальных коэффициентов модуляции по измеренным среднеквадратичным уровням дискретных составляющих огибающих, определении суммарного коэффициента модуляции по результатам корреляционного анализа огибающей (Новиков А.К. Статистические измерения в судо вой акустике. - Л.: С удостроение, 1985. - 272с.). Недостаток данного способа состоит в том, что в качестве информативных признаков выделяются порциальный и суммарный коэффициенты модуляции, хотя важные информативные признаки содержатся в форме корреляционной функции, наличие вышеуказанного недостатка снижает не только эффективность и функциональные возможности способа обработки сигналов, но и надежность распознавания в современных коплексированных системах. Технической задачей предлагаемого. изобретения является выделение дополнительных информативных признаков, расширение функциональных возможностей способа, повышение надежности распознавания низколетящих аэродинамических винтомоторных объектов на основе использования в качестве жесткого эталона спектра огибающей отраженного радиолокационного сигнала от вращающи хся с высокой стабильностью лопастей несущего и рулевого винтов и выявления многообликовой структуры доплеровских сигналов в пространстве изменений масштаба по частотной оси. Поставленная задача достигается тем, что производят прием, амплитудное детектирование и спектральное разложение гидроакустического шумоизлучения вертолета, излучают зондирующий радиолокационный сигнал в виде пачек импульсов или импульсов квазинепрерывного сигнала, принимают отраженный от объекта сигнал, выделяют амплитудн ую огибающую пачек импульсов или импульсов квазинепрерывного сигнала, отраженного от лопастей винтов вертолета, производят ее (огибающей) спектральное разложение. Сравнивают комплексные спектры огибающих пачек или импульсов квазинепрерывного сигнала и шумоизлучения на корреляционном уровне, выделяют информативные признаки крутизну спада и частоту осцилляции, формируют мультипликативную взаимокорреляционную функцию амплитудных спектров огибающей отраженного радиолокационного сигнала и шумоизлучения в инфрэзвуковом диапазоне частот, на основе сравнения полученных корреляционных максимумов с порогом определяют их количество и положение на оси доплеровских сжатий, формируют доплеровские траектории скоростей движения вращающихся лопастей, оценивают динамику изменения доплеровских параметров и по наличию доплеровской модуляции, частотам модуляции и динамике изменения доплеровских параметров принимают решение о классе объекта. Сопоставительный анализ заявляемого решения с прототипом показывает, что заявляемый способ отличается от известного тем, что используются крутизна спада и частота осцилляции, формируют мультипликативную взаимокорреляционную функцию амплитудных спектров огибающей отраженного радиолокационного сигнала и шумоизлучения в инфразвуковом диапазоне частот; сравнивают полученные корреляционные максимумы с порогом; определяют их количество и положение на оси доплеровских сжатий; формируют доплеровские траектории скоростей движения вращающи хся лопастей; оценивают динамику изменения доплеровских параметров. Таким образом, заявляемый способ соответствует критериям "новизна" и "существенные отличия". Реализация предлагаемого способа распознавания аэродинамических винтомоторных объектов представлена на чертеже (фиг.). В состав схемы входят: 1 - приемник и передатчик радиолокационных сигналов; 2 приемник гидроакустических сигналов; 3, 4, 5, 6 соответственно первый, второй, третий, четвертый перемножители; 7, 8 - соответственно первый и второй фильтры нижних частот (ФНЧ); 9, 10, 11, 12 - соответственно первый, второй, третий и четвертый блоки вычисления быстрого преобразования Фурье (БПФ); 13 - блок разделения и комплексно сопряженного перемножения; 14, 15, 16 - соответственно первый, второй и третий блоки вычисления модуля; 19 и 20 - соответственно первое и второе пороговое устройство; 17 и 18 - блоки экспоненциального сжатия спектров по частотной оси, 21 - блок оценки задержки; 22 - блок оценки сжатий; 23 - блок формирования доплеровских траекторий и оценки динамики изменения доплеровских параметров; 24 - блок выделения информативных признаков; 25 блок сравнения информативных признаков с эталонными. Работа схемы протекает в следующей последовательности. Отраженный от объекта сигнал x(t) с вы хода приемника радиолокационных сигналов (1) подается на два перемножителя (3 и 4), где умножаются на два ортогональных гетеродинных напряжений с частотой fc: cos2pf0t и sin2pf0t, ФНЧ (7, 8), следующие за перемножителями, подавляют все высшие гармоники, пропуская без искажений низкочастотные квадратурные составляющие сигнала x(t): xc(t) и xs(t). При комплексном представлении узкополосного радиосигнала x(t) можно записать в виде где Re[ • ] - реальная часть комплексного сигнала; комплексная огибающая сигнала, которая в свою очередь может быть представлена как: На выходе блока 9 формируется комплексный спектр комплексной огибающей преобразование Фурье. В результате спектр узкополосного сигнала оказывается сдвинутым в область видеочастот, то есть в область частот амплитудной и частотной модуляций с устранением дополнительных шумов из-за наложений частотных составляющи х действительного сигнала при его сдвиге в область видеочастот (т.е. отражений от нуля). Посредством третьего перемножителя 5 сохраняем верхнюю боковую полосу частот составляющи х амплитудной модуляции: Аналогичные процедуры обработки предусмотрены для шумоизлучения объекта y(t) в блоках 2, 10 и 6 для гидроакустического канала: Комплексные спектры огибающей радиолокационого сигнала и гидроакустического сигнала подвергаются дальнейшей обработке в блоке 13: где формируется взаимный спектр в области положительных частот. В схеме реализован корреляционный метод измерения дальности до объекта и ее распознавания по признакам. В третьем вычислителе БПФ 11 реализуется процедура вычисления обычной аддитивной взаимокорреляционной функции методом быстрой свертки: При этом необходимо учитывать, что для осуществления прямого и обратного (в процедуре (7) используется операция обратного БПФ) преобразований требуется замена знаков поворотных множителей на противоположные. Выходные величины блока 11: вещественная Rвху(t) и мнимая Rмху(t) части комплексной корреляционной функции второй блок вычисления реализована операция: - поступают во модуля 15, где Модуль взаимокорелляционной функции (ВКФ) является сигнальной функцией и, в случае превышения ее максимумом заданного в блоке 19 порогового уровня, в блоке оценки задержки 21 определяется запаздывание t, по которому (с учетом распространения акустической и электромагнитной энергией в двух средах) оценивается дальность до объекта. Кроме того, модуль ВКФ используется для выделения информативных признаков, таких как крутизна спада и частота осцилляции, суммарный коэффициент, модуляции, численные значения которых в блоке 25 сравниваются с эталонными. Эхо-сигнал, отраженный от объекта с вращающимися элементами конструкции, обладает многообликовой структурой в области доплеровских деформаций ai. Для определения значений параметров a i в первом 14 и в третьем 16 блоках вычисления модулей (амплитудных спектров) определяются спектральные функции. соответственно для радиолокационного A1(w) и гидроакустического A2(w) сигналов. Эти спектры подвергаются процедуре мультипликативной взаимной корреляции (Кейсвсент Д., Псалтис Д. Новые методы оптических преобразований для распознавания образов // ТИИЭР. - Т.65. - №1. 1977. - С.92 - 100), а именно корреляции по доплеровскому сжатию a: Для реализации данной процедуры в блоках 17 и 18 выполняется экспоненциальное сжатие спектров по частотной оси согласно соотношений: Тогда получим: где На выходе коррелятора, реализующего (12), появятся корреляционные максимумы, положение которых дает возможность оценить коэффициенты доплеровских сжатий a. Количество корреляционных максимумов определяется количеством элементов объекта, движущи хся с различными скоростями (несущий и рулевой винты, вибрации корпуса, маховые движения лопастей, движение фюзеляжа в целом). Четвертый блок вычисления БПФ 12 предназначен для получения R(a) по методу быстрой свертки, т.е. меллиновская корреляция аналогична корреляции Фурье при условии предварительного экспоненциального сжатия обрабатываемых спектров сигналов различных физических полей. При условии превышения порогового уровня, выставленного во втором пороговом устройстве 20, в блоке 22 оцениваются значения доплеровских параметров a 1. Формирование доплеровских траекторий и динамика изменения производится и оценивается соответственно в блоке 23 следующим образом. Оценка сжатий, соответствующи х корреляционным максимумам при обработке одной реализации, образуют строку сжатий реализаций при обработке последовательности строки сжатий образуют матрицу сжатий которая дополняется матрицей отношений сигнал-помеха. После вторичной обработки этих матриц, методами траекторией фильтрации формируются доплеровские траектории скоростей движения рассеивателей объекта, движущи хся с разными радиальными скоростями. Работоспособность предлагаемого способа проверена на записях натурных сигналов, получаемых посредством: по гидроакустическому каналу - аппаратурой, принимающей сигналы вертолетов Ми-14 и Ка-25 в диапазоне 1 - 500Гц; по радиолокационному каналу по длине волны 3см и 0,8см - аппаратурой, позволяющей получать огибающую пачек импульсов в диапазоне частот 1 - 500Гц. Установлена идентичность огибающих (формы) спектров сигналов двух физических полей, наличие сильной корреляции; аддитивной и мультипликативной, что позволяет выявлять устойчивые информативные признаки воздушных и надводных винтомоторных морских объектов, характеризующи х и х класс. Вышеописанный способ Повышает эффективность распознавания низколетящих аэродинамических объектов в современных комплексированных системах и расширяет функциональные возможности обработки сигналов.
ДивитисяДодаткова інформація
Автори англійськоюBaeanov Oleksandr Mykolaiovych
Автори російськоюБаранов Александр Николаевич
МПК / Мітки
МПК: G01S 13/42, G01S 13/78
Мітки: об'єктів, аеродинамічних, гвинтомоторних, низької, спосіб, літають, розпізнавання
Код посилання
<a href="https://ua.patents.su/3-25466-sposib-rozpiznavannya-aerodinamichnikh-gvintomotornikh-obehktiv-yaki-nizko-litayut.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання аеродинамічних гвинтомоторних об’єктів, які низько літають</a>
Пристрій радіолокаційного розпізнавання об’єктів

Номер патенту: 24164
Опубліковано: 07.07.1998
Автори: Краснов Леонід Михайлович, Баранов Олександр Миколайович, Говоров Валентін Сергійович, Братішко Микола Федорович
МПК: G01S 13/78
Мітки: об'єктів, розпізнавання, радіолокаційного, пристрій
Формула / Реферат:
Устройство радиолокационного распознавания объектов, содержащее передатчик, приемник, передающую и приемную антенны и последовательно соединенные первый смеситель, первый фильтр нижних частот и устройство воспроизведения образа объекта, причем вход передающей антенны подключен к первому выходу передатчика, второй выход которого подсоединен к первому входу первого смесителя, выход приемной антенны через приемник подключен ко второму входу...
Спосіб розпізнавання симетричності зображень об’єктів і пристрій для його реалізації
Номер патенту: 3741
Опубліковано: 27.12.1994
Автори: Кожем'яко Володимир Прокопович, Буда Антоніна Георгіївна, Мартинюк Тетяна Борисівна, КРАСИЛЕНКО ВОЛОДИМИР ГРИГОРОВИЧ
МПК: G06K 9/52, G06K 9/58, G06K 11/00
Мітки: об'єктів, зображень, розпізнавання, реалізації, симетричності, пристрій, спосіб
Формула / Реферат:
1. Способ распознавания симметричности изображений объектов, включающий формирование светового потока исходного изображения в неподвижной системе координат с первой и второй ортогональными осями, разделение сформированного светового потока на два одинаковых равноинтенсивных световых потока, пространственную модуляцию первого и второго разделенных световых потоков вдоль одноименной координатной оси с симметрией относительно другой...
Пристрій розпізнавання радіолокаційних об’єктів

Номер патенту: 9978
Опубліковано: 30.09.1996
Автори: Гребенюк Андрій Юрійович, Кулько Аркадій В'ячеславович, Новіков Володимир Пилипович, Берека Валерій Веніамінович
МПК: G01S 13/78, G01S 13/02
Мітки: розпізнавання, радіолокаційних, пристрій, об'єктів
Формула / Реферат:
Устройство распознавания радиолокационных объектов, содержащее N каналов обработки, каждый из которых включает блок задержки, приемник и ключ, причем информационные выходы первых блоков сдвигающих регистров соединены с адресными входами блоков постоянных запоминающих устройств, информационные выходы которых соединены с соответствующими входами вторых блоков сдвигающих регистров, выходы которых соединены с соответствующими входами блока...
Нейрокомп’ютерний пристрій розпізнавання повітряних об’єктів

Номер патенту: 9979
Опубліковано: 30.09.1996
Автори: Берека Валерій Веніамінович, Гребенюк Андрій Юрійович, Кулько Аркадій В'ячеславович, Новіков Володимир Пилипович
МПК: G01S 13/78, G01S 13/02
Мітки: пристрій, об'єктів, розпізнавання, нейрокомп'ютерний, повітряних
Формула / Реферат:
Нейтрокомпьютерное устройство распознавания воздушных объектов, содержащее блок управления, состоящий из последовательно соединенных RS-триггера, второго элемента И, счетчика импульсов, регистра кодов дальности и цифроаналогового преобразователя, выход которого является первым выходом блока управления, последовательно соединенных элемента НЕ, вход которого является первым входом блока управления и соединен с R-входом RS-триггера и входом...
Пристрій розпізнавання типу транспортних одиниць залізничого составу
Номер патенту: 3668
Опубліковано: 27.12.1994
Автори: Сальніков Ігор Михайлович, Нор Олег Віталійович, Єрмошенко Анатолій Олександрович
МПК: B61L 25/00
Мітки: пристрій, составу, розпізнавання, одиниць, типу, залізничого, транспортних
Формула / Реферат:
Устройство опознавания типа транспортных единиц железнодорожного состава, содержащее установленный на участке считывания оптический датчик наличия транспортной единицы, выходом соединенный с одним входом одного из ключевых элементов, триггеры, выход первого из которых соединен с одним входом второго, одновибратор, элементы И, вход одного из которых подключен к инверсному выходу третьего триггера, прямым выходом соединенного с одним входом...
Попередній патент: Автоматична формувальна лінія для виготовлення ливарних півформ
Наступний патент: Форсунка для утилізації замазучених стоків
Випадковий патент: Котел електродний