Спосіб вертикального переміщення вантажів краном
Номер патенту: 27558
Опубліковано: 12.11.2007
Автори: Клімченкова Наталія Валеріївна, Спаська Анна Михайлівна

Формула / Реферат
Спосіб вертикального переміщення вантажів краном, що включає підготовчі технологічні операції повороту платформи зі стрілою, зміни вильоту стріли, вертикального переміщення каната з вантажозахватним пристроєм до місця розташування вантажу, що піднімається, кріплення вантажу на вантажозахватному пристрої, додаткову контрольну технологічну операцію з візуального визначення кута відхилення нитки каната від її прямовисного положення і ліквідації цього кута шляхом додаткових переміщень платформи і стріли, основну технологічну операцію з вертикального переміщення вантажу шляхом вмикання електродвигуна механізму підйому на номінальну (розрахункову) частоту обертання ротора, технологічні операції з горизонтального і вертикального переміщеннях вантажу в задане місце, який відрізняється тим, що додаткову контрольну технологічну операцію з візуального визначення кута відхилення нитки каната від її прямовисного положення і ліквідації цього кута переміщенням платформи і стріли проводять з використанням виска, що складається з нитки з грузилом, закріпленого на канаті, а основну технологічну операцію з вертикального переміщення вантажу проводять у два етапи, на першому етапі проводять вибір слабини каната і люфту в кінематичній передачі до натягу каната під дією ваги вантажу, що піднімається, при низькій частоті обертання ротора електродвигуна в механізмі підйому, на другому етапі плавно підвищують частоту обертання до номінального (розрахункового) значення.
Текст
Спосіб вертикального переміщення вантажів краном, що включає підготовчі технологічні операції повороту платформи зі стрілою, зміни вильоту стріли, вертикального переміщення каната з вантажозахватним пристроєм до місця розташування вантажу, що піднімається, кріплення вантажу на вантажозахватному пристрої, додаткову контрольну технологічну операцію з візуального визначення кута відхилення нитки каната від її прямовисного положення і ліквідації цього кута шляхом додаткових переміщень платформи і стріли, основну технологічну операцію з вертикального переміщення вантажу 3 переміщень платформи і стріли в процесі опускання вантажозахватного пристрою до місця розташування вантажу, що піднімається. Найбільш близьким за технічною сутністю є спосіб вертикального переміщення вантажів, прийнятий за прототип, що включає підготовчі технологічні операції повороту платформи зі стрілою, зміни вильоту стріли, вертикального переміщення каната з вантажозахватним пристроєм, додаткову контрольну технологічну операцію з візуального визначення кута відхилення нитки каната від її прямовисного положення (стосовно центра ваги вантажу) і ліквідації кута відхилення шляхом додаткових переміщень платформи і стріли за командами, що подає стропальник, основну технологічну операцію з вертикального переміщення вантажу шляхом вмикання електродвигуна в механізмі підйому на номінальну частоту обертання ротора, наступні технологічні операції по горизонтальному і вертикальному переміщеннях вантажу в задане місце. (Ключев В.И. Ограничение динамических нагрузок электропривода. -М.; Энергия, 1971.320с.). Для цього способу вертикального переміщення вантажів краном властиві наступні недоліки: - суттєве збільшення ударного механічного навантаження у вантажопідйомному канаті і кінематичній передачі механізмів крана, обумовлене виникненням ривка при підхопленні вантажу на номінальній частоті обертання ротора; - розгойдування вантажу, що піднімається, відносно положення рівноваги, викликані наближеним визначенням кута відхилення нитки каната від її прямовисного положення, підвищують механічні напруги в канаті і конструкції механізмів крана, знижують точність розміщення вантажів у заданому місці, підвищують імовірність виникнення аварійних ситуацій. Загальними суттєвими ознаками відомого способу і того, що заявляється, є наявність підготовчих технологічних операцій з переміщення платформи, стріли і каната, додаткової контрольної технологічної операції по визначенню кута відхилення нитки каната від її прямовисного положення і ліквідації кута відхилення, основної технологічної операції з вертикального переміщення вантажу шляхом вмикання електродвигуна в механізмі підйому, наступних технологічних операцій по горизонтальному і вертикальному переміщеннях вантажу в задане місце. В основу корисної моделі поставлена задача удосконалення способу вертикального переміщення вантажів краном, що включає підготовчі технологічні операції повороту платформи зі стрілою, зміни вильоту стріли, вертикального переміщення каната з вантажозахватним пристроєм до місця розташування вантажу, що піднімається, кріплення вантажу на вантажозахватному пристрої, додаткову контрольну технологічну операцію з візуального визначення кута відхилення нитки каната від її прямовисного положення і ліквідації 27558 4 кута відхилення шляхом додаткових операцій з переміщення платформи і стріли за командами стропальника, основну технологічну операцію з вертикального переміщення вантажу шляхом вмикання електродвигуна в механізмі підйому, наступні технологічні операції з горизонтального і вертикального переміщеннях вантажу в задане місце. Поставлена задача вирішується за рахунок того, що додаткову контрольну технологічну операцію з визначення кута відхилення нитки каната від її прямовисного положення і ліквідації цього кута переміщеннями платформи і стріли проводять з використанням виску, що складається з нитки з тягарем і закріплюється на канаті, а основну технологічну операцію з вертикального переміщення вантажу проводять у два етапи, на першому етапі проводять вибір слабини каната і люфту в кінематичній передачі до натягу каната під дією ваги вантажу, що піднімається, при низькій (повзучій) частоті обертання ротора електродвигуна в механізмі підйому, на другому етапі плавно підвищують частоту обертання ротора до номінальної. Далі проводять наступні технологічні операції з переміщенню вантажу в задане місце відомими способами. Запропонований спосіб вертикального переміщення вантажів краном здійснюють таким чином. Вмиканням електродвигуна в механізмі повороту платформи крана переміщають платформу зі стрілою так, щоб вісь стріли розташувалася над центром ваги вантажу, що піднімається. Вмиканням електродвигуна в механізмі повороту стріли змінюють її виліт так, щоб лінія нитки каната з вантажозахватним пристроєм приблизно була перпендикулярна (прямовисна) до площини розміщення центра ваги вантажу, що піднімається. Вмиканням електродвигуна в механізмі підйому вантажу переміщають вантажозахватний пристрій до місця розташування вантажу. Стропальник закріплює вантаж на вантажозахватному пристрої. Підготовчі технологічні операції на цьому завершуються. Для проведення додаткової контрольної технологічної операції з визначення кута відхилення нитки каната від її прямовисного положення і ліквідації цього кута стропальник прикріплює висок до каната поблизу вантажозахватного пристрою. Відомий пристрій, призначений для визначення прямовисного положення частин конструкції, називається виском. Наприклад, висок застосовують для визначення прямовисності цегляної стіни, що споруджується, і виключення її відхилення від цього положення. Пристрій складається з нитки з підвішеним грузилом. Нитку виску кріплять на канаті за допомогою захоплювача, виконаного у вигляді прищіпки. Кут, виявлений між ниткою каната і ниткою виску, указує стропальнику на необхідність додаткових переміщень платформи і стріли, напрямок цих переміщень - до збігу обох ниток і ліквідації кута неузгодженості. При проведенні додаткової контрольної технологічної операції стропальник подає крановикові команди, передбачені 5 інструкцією з експлуатації крана. Основну технологічну операцію з вертикального переміщення вантажу проводять у два етапи. На першому етапі вмикають електродвигун у механізмі підйому на низьку (повзучу) частоту обертання ротора (близько 15-30 оборотів у хвилину). За 1-1,5 обороту ротора відбувається вибір люфту в кінематичній передачі механізму підйому, слабини каната і строп практично без механічного навантаження на валу електродвигуна і при нерухомому вантажі. Про закінчення першого етапу і достатньому натягу каната під дією ваги вантажу, що піднімається, свідчить початок збільшення електричного струму, споживаного електродвигуном і відмічуваного по шкалі амперметра. Після цього сигналу зі шкали приладу (амперметра) проводять другий етап технологічної операції шляхом плавного підвищення частоти обертання ротора до номінальної (розрахункової). Команди про перехід до першого і другого етапів вертикального переміщення вантажу може подавати крановику стропальник, що знаходиться біля закріпленого вантажу. Наступні технологічні операції з горизонтального і вертикального переміщеннях вантажу у задане місце проводять за відомою технологією. Запропонований спосіб вертикального переміщення вантажів краном дозволяє знизити максимальні ударні механічні навантаження і напруги в механізмах крана, імовірність виникнення аварійних ситуацій, підвищити довговічність і експлуатаційну надійність крана. 27558 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of vertical shifting of cargo by crane
Автори англійськоюKlimchenkova Nataliya Valeriivna, Spaska Anna Mykhailivna
Назва патенту російськоюСпособ вертикального перемещення грузов краном
Автори російськоюКлимченкова Наталья Валерьевна, Спасская Анна Михайловна
МПК / Мітки
МПК: B66F 19/00
Мітки: краном, вертикального, переміщення, спосіб, вантажів
Код посилання
<a href="https://ua.patents.su/3-27558-sposib-vertikalnogo-peremishhennya-vantazhiv-kranom.html" target="_blank" rel="follow" title="База патентів України">Спосіб вертикального переміщення вантажів краном</a>
Пристрій для піднімання та переміщення вантажів
Номер патенту: 15841
Опубліковано: 17.07.2006
Автори: Шевченко Олександр Юхимович, Резнік Вячеслав Григорович, Соколенко Анатолій Іванович, Піддубний Володимир Антонович, Бут Сергій Анатолійович
МПК: B65B 5/10
Мітки: переміщення, пристрій, вантажів, піднімання
Формула / Реферат:
1. Пристрій для піднімання та переміщення вантажів, що складається з механізмів вертикального і горизонтального переміщення, який відрізняється тим, що кінцевий елемент підвіски механізму вертикального переміщення виконано у вигляді ролика, що утворює вищу кінематичну пару з двома симетричними коромислами, встановленими на спільному каркасі зі змонтованими на них опорними роликами для базування на них підвіски гака.2. Пристрій за п. 1,...
Пристрій для переміщення вантажів
Номер патенту: 3604
Опубліковано: 15.12.2004
Автор: Чиннов В'ячеслав Андрійович
МПК: B66D 1/02
Мітки: вантажів, пристрій, переміщення
Формула / Реферат:
Пристрій для переміщення вантажів, що містить редуктор із зубчатою передачею, який взаємодіє з приводом і барабаном-котушкою, що несе трос, який відрізняється тим, що редуктор виконано у вигляді диференційно-гвинтової планетарної передачі, гвинт якої з'єднано з демпфером, наприклад повітряним, який оснащений вентилем, що має можливість змінювати швидкість демпфірування і швидкість троса-вантажу.
Демпферний пристрій для переміщення вантажів
Номер патенту: 3605
Опубліковано: 15.12.2004
Автор: Чиннов В'ячеслав Андрійович
МПК: F16F 13/00
Мітки: пристрій, демпферний, переміщення, вантажів
Формула / Реферат:
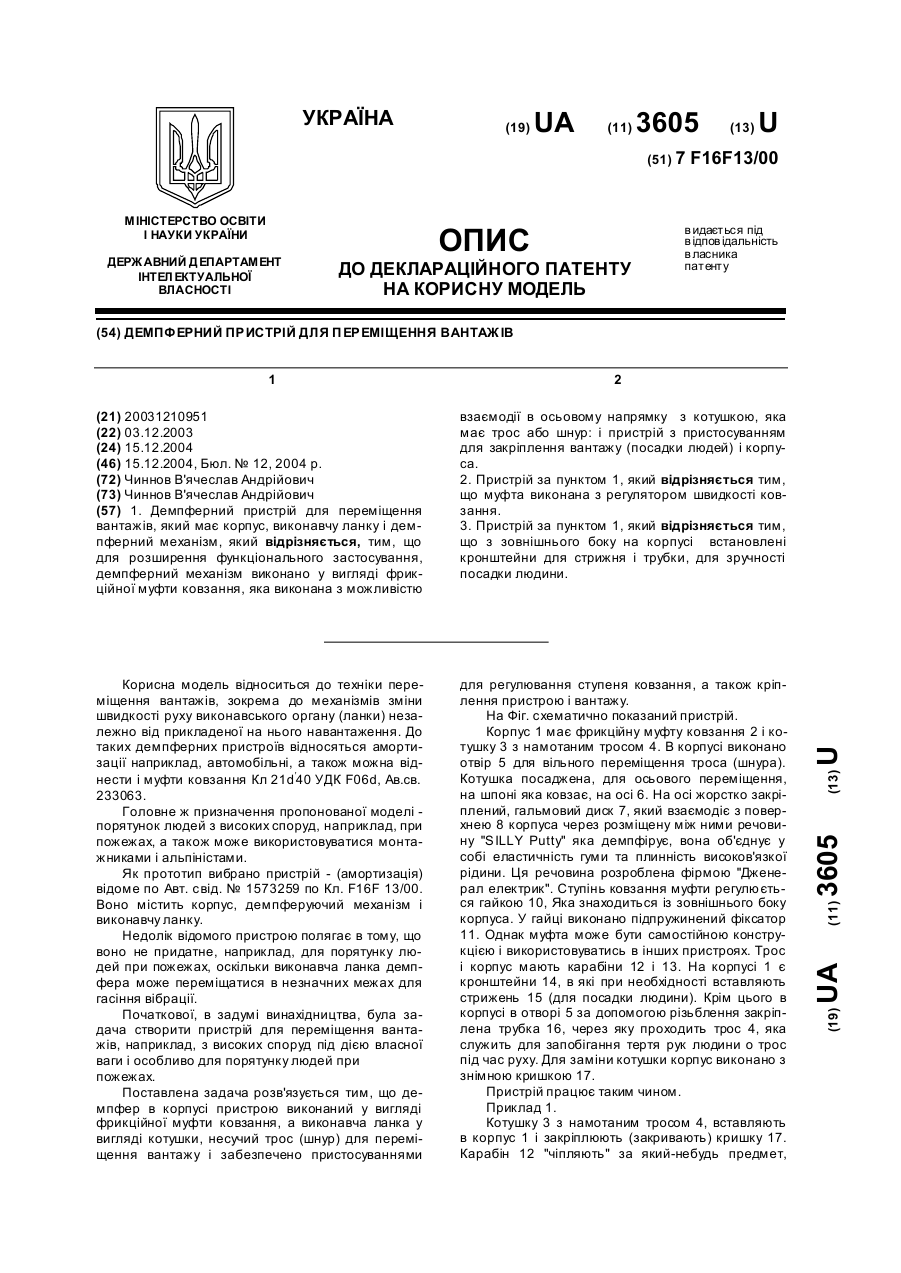
1. Демпферний пристрій для переміщення вантажів, який має корпус, виконавчу ланку і демпферний механізм, який відрізняється, тим, що для розширення функціонального застосування, демпферний механізм виконано у вигляді фрикційної муфти ковзання, яка виконана з можливістю взаємодії в осьовому напрямку з котушкою, яка має трос або шнур: і пристрій з пристосуванням для закріплення вантажу (посадки людей) і корпуса.2. Пристрій за пунктом 1,...
Пристрій для переміщення вантажів
Номер патенту: 5315
Опубліковано: 15.03.2005
Автор: Чиннов В'ячеслав Андрійович
МПК: B66B 9/16
Мітки: вантажів, пристрій, переміщення
Формула / Реферат:
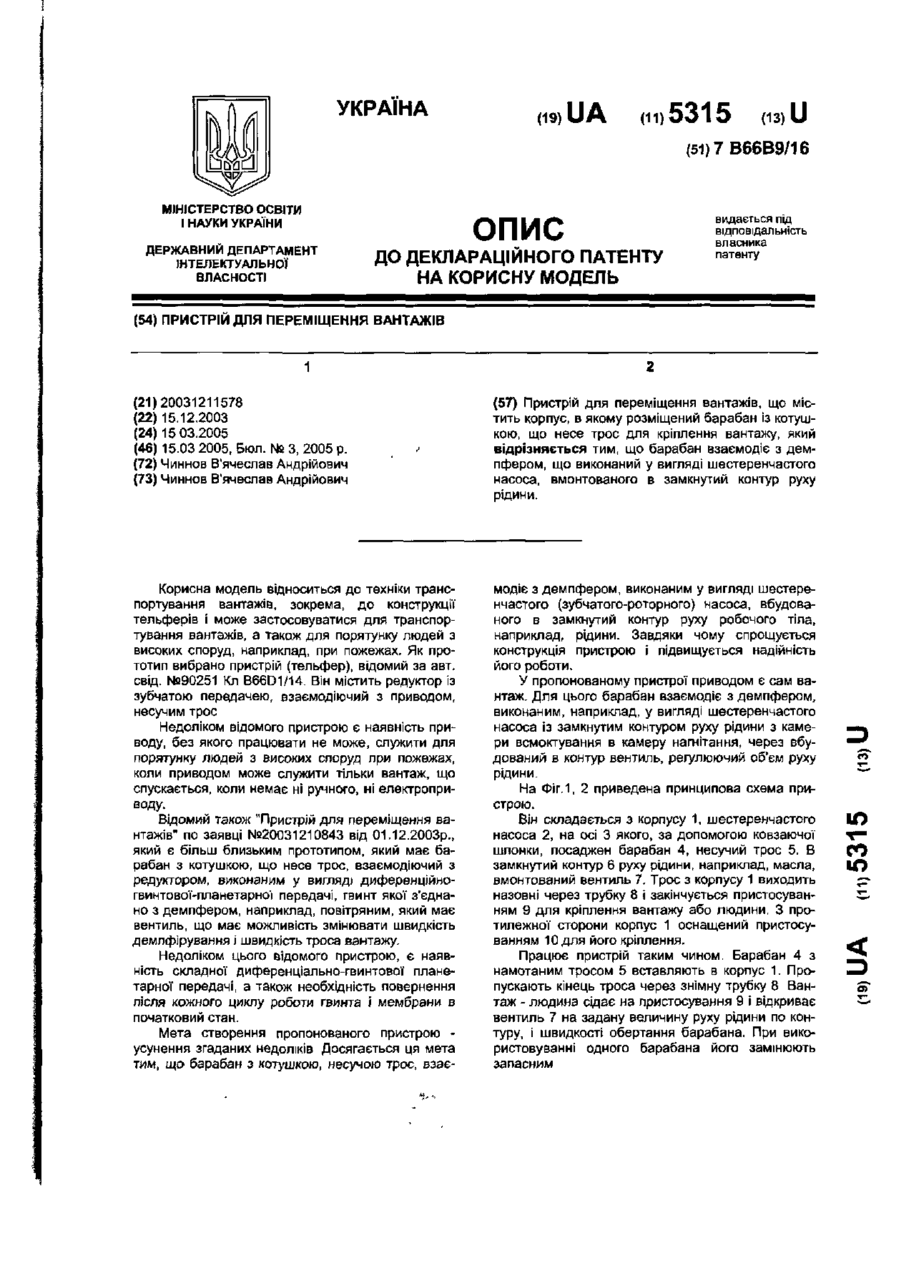
Пристрій для переміщення вантажів, що містить корпус, в якому розміщений барабан із котушкою, що несе трос для кріплення вантажу, який відрізняється тим, що барабан взаємодіє з демпфером, що виконаний у вигляді шестеренчастого насоса, вмонтованого в замкнутий контур руху рідини.
Пристрій для переміщення вантажів
Номер патенту: 10894
Опубліковано: 15.12.2005
Автор: Чиннов В'ячеслав Андрійович
Мітки: переміщення, пристрій, вантажів
Формула / Реферат:
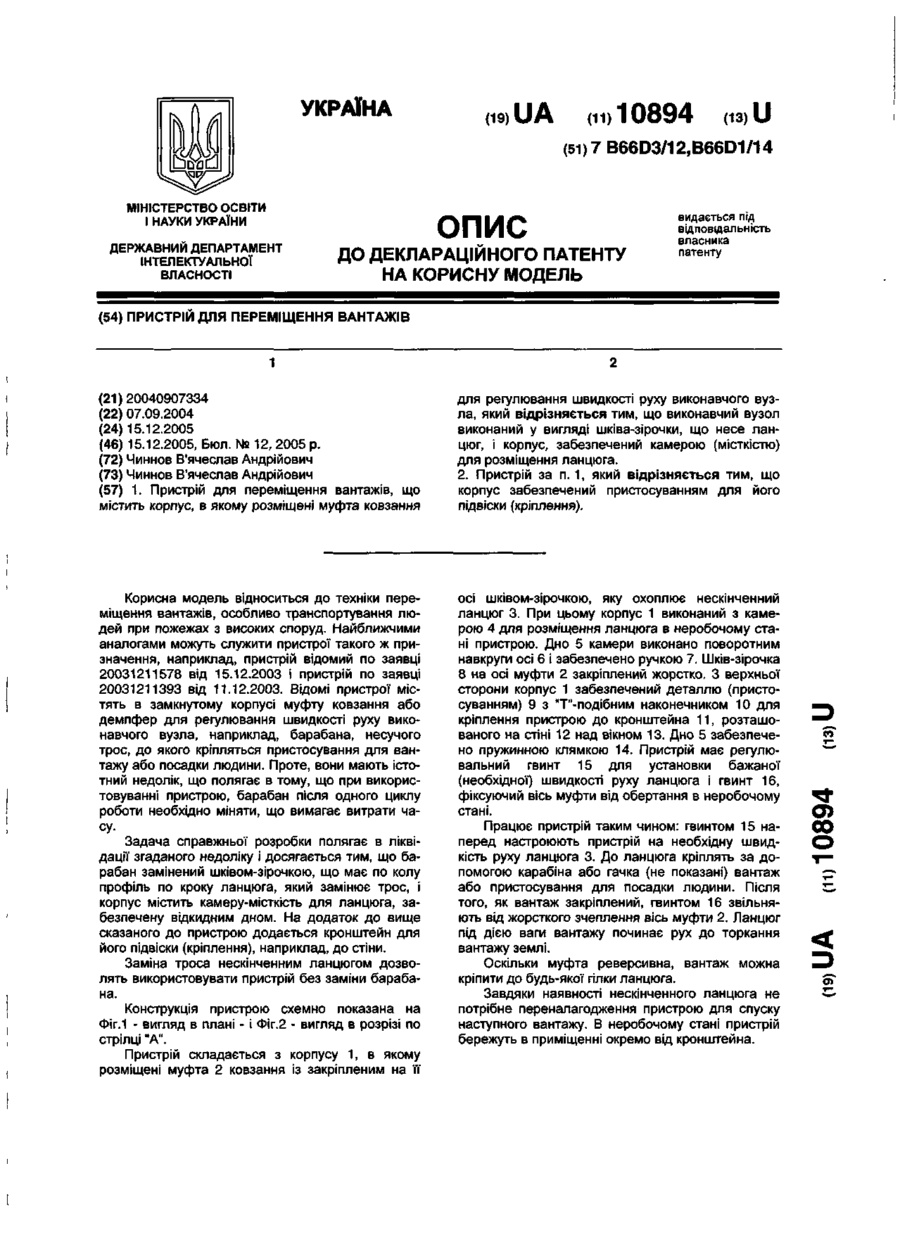
1. Пристрій для переміщення вантажів, що містить корпус, в якому розміщені муфта ковзання для регулювання швидкості руху виконавчого вузла, який відрізняється тим, що виконавчий вузол виконаний у вигляді шківа-зірочки, що несе ланцюг, і корпус, забезпечений камерою (місткістю) для розміщення ланцюга.2. Пристрій за п. 1, який відрізняється тим, що корпус забезпечений пристосуванням для його підвіски (кріплення).
Попередній патент: Спосіб визначення товщини і розташування межі наплавленого шару
Наступний патент: Високошвидкісний пневмогідравлічний молот
Випадковий патент: Спосіб виготовлення водостійких деревинно-полімерних плит