Бортовий комплекс літального апарата
Номер патенту: 2796
Опубліковано: 16.08.2004
Автори: Шервашидзе Володимир Варламович, Мурзаханов Олександр Валентинович, Шкляр Володимир Петрович, Самусь Андрій Ігорович
Формула / Реферат
Бортовий комплекс літального апарата, стабілізованого за креном, який містить розміщені у корпусі літального апарата: кардановий підвіс, що складається з рамки та платформи із закріпленою на ній головкою самонаведення; датчики кутової швидкості обертання (ДКШ), осі чутливості яких у початковий момент часу є взаємно ортогональними та паралельними осям рамки карданового підвісу і платформи; інтегратори; датчики кутів (ДК); виконавчі приводи відпрацювання кутів відхилення рамки карданового підвісу та платформи; блок автоматики та зв'язку з літаком-носієм (БАЗЛ); при цьому вихід першого ДКШ через перший інтегратор з'єднаний зі входом БАЗЛ, другі виходи першого та другого ДКШ з'єднані із БАЗЛ, виходи БАЗЛ з'єднані з приводами відпрацювання кутів відхилення рамки карданового підвісу та платформи, вихід приводу відпрацювання кута відхилення рамки карданового підвісу з'єднаний з рамкою карданового підвісу, на вихідній осі якої знаходиться датчик кута, вихід приводу кута відхилення платформи з'єднаний з платформою, на вихідній осі якої знаходиться датчик кута, виходи обох датчиків кутів з'єднані з БАЗЛ, у свою чергу БАЗЛ за входом та виходом з'єднаний з літаком-носієм, який відрізняється тим, що містить: блок обчислення тригонометричних функцій; два інтегратори; два ДК; один виконавчий привід відпрацювання кутів відхилення рамки карданового підвісу; два ДКШ; при цьому ДКШ розташовані на корпусі літального апарата, блок обчислення тригонометричних функцій з'єднаний із виходами другого ДКШ і першого інтегратора та входом другого інтегратора, а кардановий підвіс є двовісним.
Текст
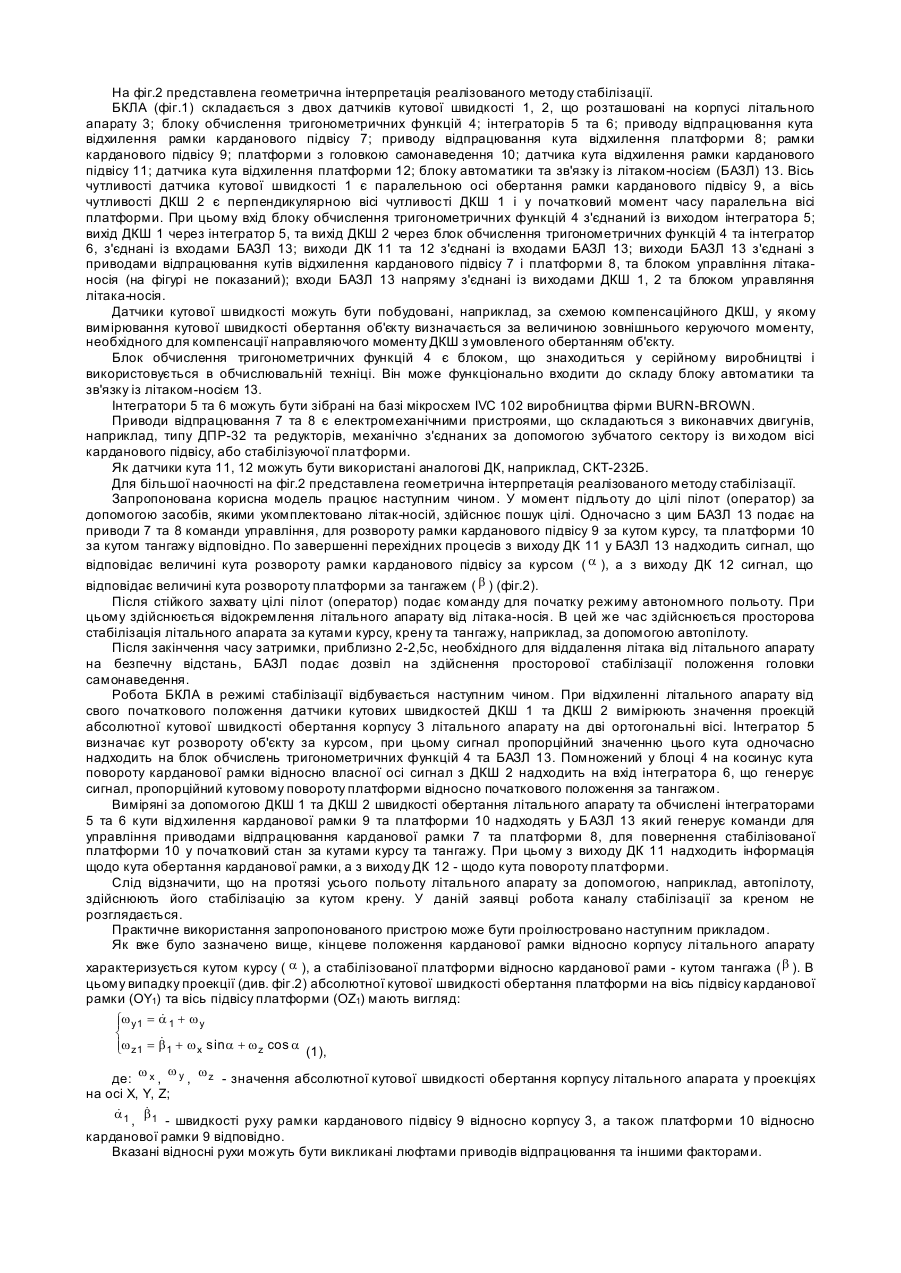
Корисна модель належить до гіроскопічної техніки і може бути використана у різних об'єктах авіаційної техніки для доставки з літальних апаратів на землю корисних вантажів з підвищеною точністю, зокрема для ліквідації, в різноманітних умовах експлуатації, широкого спектру перешкод, у тому числі залізобетонних споруд, те хніки, злітно-посадочних смуг, ангарів, а також заторів, при екстремальних ситуаціях та сти хійних лиха х. Спеціалістам відомо, що бортовий комплекс літального апарату (БКЛА) призначений для просторової стабілізації та наведення в горизонтальній та вертикальній площинах осі чутливості головки самонаведення, розташованої на гіростабілізованій платформі, а також для видачі сигналів, пропорційних кутам повороту осі чутливості головки самонаведення у горизонтальній та вертикальній площинах. Найближчим аналогом запропонованої корисної моделі є бортовий комплекс коригованого літального апарату, стабілізованого за креном, з телевізійною головкою самонаведення (патент Росії №2058011). Вищезгаданий бортовий комплекс складається з розміщених у корпусі літального апарату: телевізійної головки самонаведення, встановленої на трьохвісній гіростабілізованій платформі; трьох датчиків кутової швидкості (ДКШ), розташованих на осях зовнішньої та внутрішньої рамок карданового підвісу та корпусі платформи (при цьому їх осі у початковому положенні є взаємноортогональними та паралельними відповідним осям виробу); трьох датчиків кутів (ДК) за осями карданового підвісу та платформи; трьох виконавчих приводів відпрацювання кутів відхилення за відповідними осями; блоку автоматики та зв'язку з літаком-носієм (БАЗЛ); трьох інтеграторів, а також автопілоту. При цьому виходи датчиків кутової швидкості через відповідні інтегратори, а блок управління літака-носія безпосередньо, з'єднані зі входами БАЗЛ, а виходи БАЗЛ з'єднані з приводами відпрацювання кутів відхилення зовнішньої та внутрішньої рамок карданового підвісу та приводом відпрацювання кута відхилення платформи. Робота вищезгаданого аналога здійснюється за допомогою БАЗЛ, який генерує керуючі імпульси для забезпечення руху та стабілізації гіроплатформи, вимірювання параметрів кутового р уху відносно її центру мас, формування сигналів для управління рухом літального апарату, а також комутує та узгоджує сигнали і команди між літаком-носієм та бортовим комплексом літального апарата. Після виявлення цілі, пілот (оператор) подає команду на розаретування гіростабілізатора за осями курсу та тангажу. За сигналами цілевказування головка самонаведення здійснює пошук цілі із подальшим її захватом та наведенням на неї літального апарату. Після захоплення цілі відбувається розаретування ДКШ крену автопілоту і пілот (оператор) здійснює переведення літального апарату з режиму роботи під носієм у режим автономного польоту. При відокремленні апарату від літака-носія автопілот за допомогою БАЗЛ здійснює стабілізацію апарата за кутами крену, тангажу та рискання. Датчики кутової швидкості генерують сигнали, пропорційні проекціям абсолютної кутової швидкості обертання платформи в інерційному просторі на осі: а) зовнішньої рамки карданового підвісу; б) внутрішньої рамки карданового підвісу; в) платформи. Одержані величини швидкостей інтегрують за допомогою інтеграторів та визначають кути відхилення гіроплатформи від свого початкового положення, після чого БАЗЛ формує керуючі сигнали, пропорційні кутам відхилення та швидкостям руху і подає їх на відповідні виконавчі органи, які відпрацьовують зовнішню і внутрішню рамки карданового підвісу та платформу у початкове положення. Закінчення перехідного процесу визначають за допомогою датчиків кутів, розташованих на відповідних осях зовнішньої і внутрішньої рамок карданового підвісу та платформи. При роботі у режимі наведення центру мас на ціль сигнали неузгодженості цілі за кутами курсу та тангажу, що знімають з головки самонаведення, подають на автопілот для керування рулями. Крім того, для забезпечення відповідної якості перехідного процесу, в закон керування вводять сигнали кутової швидкості обертання апарату за відповідними осями. До недоліків описаного пристрою, зокрема належить розташування датчиків кутової швидкості на рухомих елементах гіростабілізованої платформи, що призводить до значних ускладнень під час компонування виробу та його балансування, враховуючи жорсткі вимоги за габаритно-масовим характеристикам класу виробів, що розглядаються. Ще одним суттєвим недоліком прототипу є відсутність зв'язку між літаком-носієм та літальним апаратом під час автономного польоту останнього, що позбавляє пілота (оператора) можливості вносити необхідні корективи, у тому числі видати команду на самознищення літального апарату, за умов його суттєви х відхилень від польотного завдання. Метою запропонованої корисної моделі є підвищення точності доставки корисного вантажу з літаків-носіїв на землю, спрощення конструкції виробу та забезпечення безперебійного зв'язку між літаком-носієм та літальним апаратом під час автономного польоту останнього. Вказана мета досягається шляхом створення бортового комплексу літального апарату, стабілізованого за креном, який містить розміщені у корпусі літального апарату: дво хвісний кардановий підвіс, що складається з рамки карданового підвісу та платформи із закріпленою на ній головкою самонаведення; два датчики кутової швидкості обертання розміщених на корпусі літального апарату, при чому вісь чутливості першого ДКШ є паралельною вісі рамки карданового підвісу, а вісь чутливості другого ДКШ є перпендикулярною вісі чутливості першого ДКШ і у початковий момент часу паралельна вісі платформи; два інтегратори; два датчики кутів; БАЗЛ; блок тригонометричних функцій. При цьому вихід першого ДКШ через перший інтегратор з'єднаний зі входом БАЗЛ, другі ви ходи першого та другого ДКШ з'єднані з БАЗЛ , ви ходи БАЗЛ з'єднані з приводами відпрацювання кутів відхилення рамки карданового підвісу та платформи, вихід приводу відпрацювання кута відхилення рамки карданового підвісу з'єднаний з рамою карданового підвісу, на вихідній вісі якого знаходиться датчик кута, ви хід приводу кута відхилення платформи з'єднаний з платформою на вихідній вісі якого знаходиться датчик кута, виходи обох датчиків кутів з'єднані з БАЗЛ, за входом та виходом БАЗЛ з'єднаний з літаком-носієм, виходи другого ДКШ та першого інтегратора через блок обчислення тригонометричних функцій та другий інтегратор з'єднані з БАЗЛ. На фіг.1 представлена функціональна схема запропонованого пристрою. На фіг.2 представлена геометрична інтерпретація реалізованого методу стабілізації. БКЛА (фіг.1) складається з двох датчиків кутової швидкості 1, 2, що розташовані на корпусі літального апарату 3; блоку обчислення тригонометричних функцій 4; інтеграторів 5 та 6; приводу відпрацювання кута відхилення рамки карданового підвісу 7; приводу відпрацювання кута відхилення платформи 8; рамки карданового підвісу 9; платформи з головкою самонаведення 10; датчика кута відхилення рамки карданового підвісу 11; датчика кута відхилення платформи 12; блоку автоматики та зв'язку із літаком-носієм (БАЗЛ) 13. Вісь чутливості датчика кутової швидкості 1 є паралельною осі обертання рамки карданового підвісу 9, а вісь чутливості ДКШ 2 є перпендикулярною вісі чутливості ДКШ 1 і у початковий момент часу паралельна вісі платформи. При цьому вхід блоку обчислення тригонометричних функцій 4 з'єднаний із виходом інтегратора 5; вихід ДКШ 1 через інтегратор 5, та вихід ДКШ 2 через блок обчислення тригонометричних функцій 4 та інтегратор 6, з'єднані із входами БАЗЛ 13; виходи ДК 11 та 12 з'єднані із входами БАЗЛ 13; виходи БАЗЛ 13 з'єднані з приводами відпрацювання кутів відхилення карданового підвісу 7 і платформи 8, та блоком управління літаканосія (на фігурі не показаний); входи БАЗЛ 13 напряму з'єднані із виходами ДКШ 1, 2 та блоком управляння літака-носія. Датчики кутової швидкості можуть бути побудовані, наприклад, за схемою компенсаційного ДКШ, у якому вимірювання кутової швидкості обертання об'єкту визначається за величиною зовнішнього керуючого моменту, необхідного для компенсації направляючого моменту ДКШ з умовленого обертанням об'єкту. Блок обчислення тригонометричних функцій 4 є блоком, що знаходиться у серійному виробництві і використовується в обчислювальній техніці. Він може функціонально входити до складу блоку автоматики та зв'язку із літаком-носієм 13. Інтегратори 5 та 6 можуть бути зібрані на базі мікросхем IVC 102 виробництва фірми BURN-BROWN. Приводи відпрацювання 7 та 8 є електромеханічними пристроями, що складаються з виконавчих двигунів, наприклад, типу ДПР-32 та редукторів, механічно з'єднаних за допомогою зубчатого сектору із ви ходом вісі карданового підвісу, або стабілізуючої платформи. Як датчики кута 11, 12 можуть бути використані аналогові ДК, наприклад, СКТ-232Б. Для більшої наочності на фіг.2 представлена геометрична інтерпретація реалізованого методу стабілізації. Запропонована корисна модель працює наступним чином. У момент підльоту до цілі пілот (оператор) за допомогою засобів, якими укомплектовано літак-носій, здійснює пошук цілі. Одночасно з цим БАЗЛ 13 подає на приводи 7 та 8 команди управління, для розвороту рамки карданового підвісу 9 за кутом курсу, та платформи 10 за кутом тангажу відповідно. По завершенні перехідних процесів з виходу ДК 11 у БАЗЛ 13 надходить сигнал, що відповідає величині кута розвороту рамки карданового підвісу за курсом ( a ), а з виходу ДК 12 сигнал, що відповідає величині кута розвороту платформи за тангажем ( b ) (фіг.2). Після стійкого захвату цілі пілот (оператор) подає команду для початку режиму автономного польоту. При цьому здійснюється відокремлення літального апарату від літака-носія. В цей же час здійснюється просторова стабілізація літального апарата за кутами курсу, крену та тангажу, наприклад, за допомогою автопілоту. Після закінчення часу затримки, приблизно 2-2,5с, необхідного для віддалення літака від літального апарату на безпечну відстань, БАЗЛ подає дозвіл на здійснення просторової стабілізації положення головки самонаведення. Робота БКЛА в режимі стабілізації відбувається наступним чином. При відхиленні літального апарату від свого початкового положення датчики кутових швидкостей ДКШ 1 та ДКШ 2 вимірюють значення проекцій абсолютної кутової швидкості обертання корпусу 3 літального апарату на дві ортогональні вісі. Інтегратор 5 визначає кут розвороту об'єкту за курсом, при цьому сигнал пропорційний значенню цього кута одночасно надходить на блок обчислень тригонометричних функцій 4 та БАЗЛ 13. Помножений у блоці 4 на косинус кута повороту карданової рамки відносно власної осі сигнал з ДКШ 2 надходить на вхід інтегратора 6, що генерує сигнал, пропорційний кутовому повороту платформи відносно початкового положення за тангажом. Виміряні за допомогою ДКШ 1 та ДКШ 2 швидкості обертання літального апарату та обчислені інтеграторами 5 та 6 кути відхилення карданової рамки 9 та платформи 10 надходять у БАЗЛ 13 який генерує команди для управління приводами відпрацювання карданової рамки 7 та платформи 8, для повернення стабілізованої платформи 10 у початковий стан за кутами курсу та тангажу. При цьому з виходу ДК 11 надходить інформація щодо кута обертання карданової рамки, а з виходу ДК 12 - щодо кута повороту платформи. Слід відзначити, що на протязі усього польоту літального апарату за допомогою, наприклад, автопілоту, здійснюють його стабілізацію за кутом крену. У даній заявці робота каналу стабілізації за креном не розглядається. Практичне використання запропонованого пристрою може бути проілюстровано наступним прикладом. Як вже було зазначено вище, кінцеве положення карданової рамки відносно корпусу лі тального апарату характеризується кутом курсу ( a ), а стабілізованої платформи відносно карданової рами - кутом тангажа ( b ). В цьому випадку проекції (див. фіг.2) абсолютної кутової швидкості обертання платформи на вісь підвісу карданової рамки (OY1) та вісь підвісу платформи (OZ1) мають вигляд: & ìw y1 = a 1 + w y ï í & + w sina + w cos a ïw z1 = b 1 î x z (1), w y wz де: w x , , - значення абсолютної кутової швидкості обертання корпусу літального апарата у проекціях на осі X, Y, Z; & & a 1 , b 1 - швидкості руху рамки карданового підвісу 9 відносно корпусу 3, а також платформи 10 відносно карданової рамки 9 відповідно. Вказані відносні рухи можуть бути викликані люфтами приводів відпрацювання та іншими факторами. Так як має місце стабілізація об'єкту за віссю Х (крен об'єкту), то w x = 0 . Інтегр уючи (1) за часом отримаємо: t ì ïa = a + w dt = a + a t = a + a &1 &1 y 1 ï ï 0 í t ï & ïb = b 1 + w y cos a dt = b cos a + b 1 ï 0 î (2), де: a , b - кути відхилення стабілізованої площини, викликані обертанням основи літального апарату. ò( ò( ) ) Відносні кути відхилення a 1 , b 1 вимірюють за допомогою датчиків кута 11 та 12, розташованих на відповідних осях. Стабілізацію літального апарату за кутами курсу та тангажу здійснюють шляхом відпрацювання рамкою карданового підвісу та платформою у протилежний бік за виміряними кутами a та b відповідно. З цього витікає, що запропонований бортовий комплекс літального апарату стабілізованого за креном дозволяє здійснювати його просторову стабілізацію за кутами курсу та тангажу, використовуючи для цього два датчики кутової швидкості, які розташовані на корпусі апарату.
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F42B 15/00, G01C 21/00
Мітки: апарата, бортовий, літального, комплекс
Код посилання
<a href="https://ua.patents.su/3-2796-bortovijj-kompleks-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Бортовий комплекс літального апарата</a>
Бортовий радіолокатор літального апарата
Номер патенту: 37472
Опубліковано: 15.05.2001
Автори: Бахвалов Борис Миколайович, Гомозов Андрій Владимирович
МПК: G01S 13/46
Мітки: бортовий, радіолокатор, апарата, літального
Формула / Реферат:
Бортовий радіолокатор літального апарата, що містить в собі антенну систему, передавач, приймач та індикатор, який відрізняється тим, що передавач виконаний з безперервним синусоїдальним сигналом високої частоти та постійної амплітуди, антенна система виконана з еквідистантної лінійки несиметричних передавальних вібраторів та ідентичної лінійки несиметричних приймальних вібраторів, лінійки розташовані вздовж фюзеляжу літального апарата, а...
Крило літального апарата
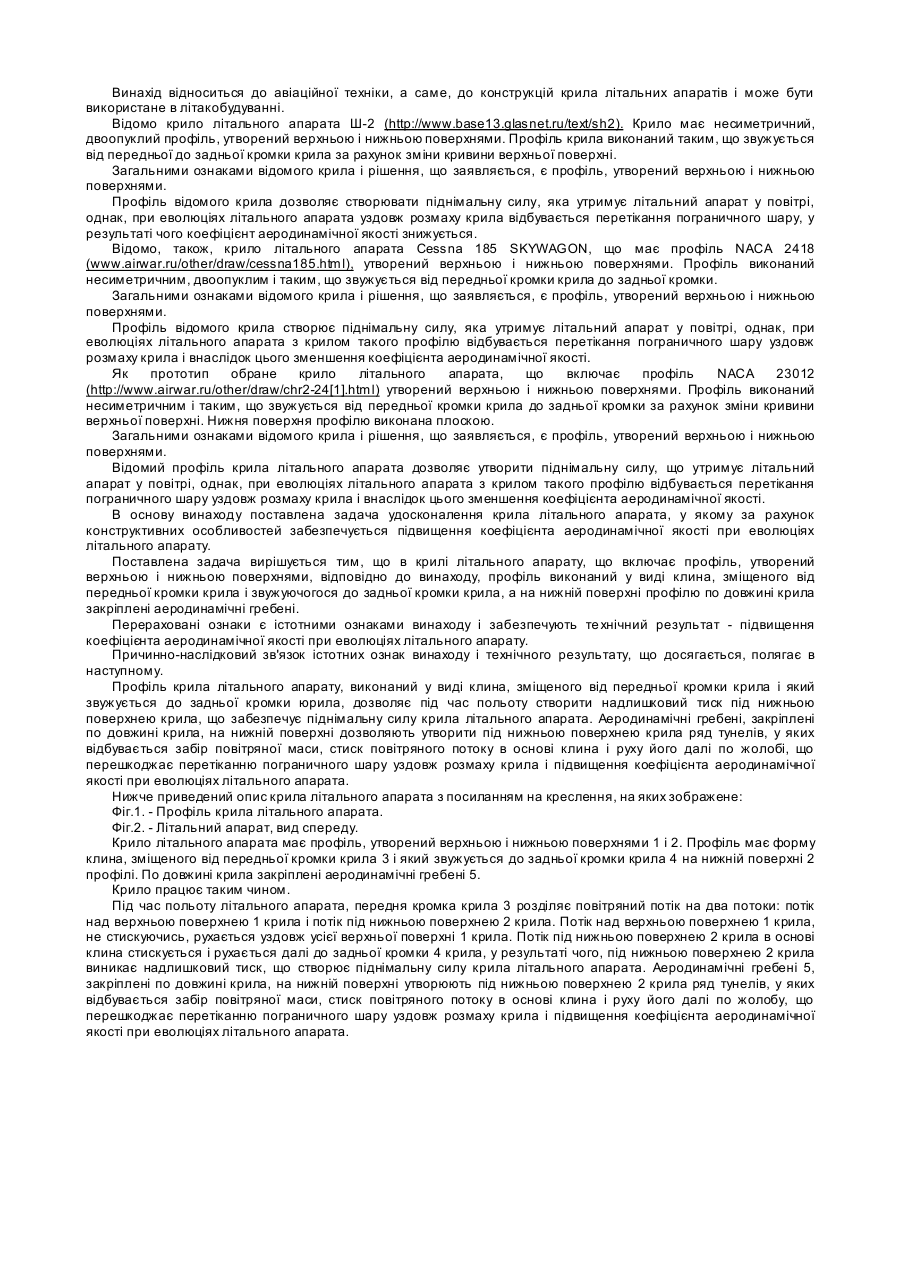
Номер патенту: 64342
Опубліковано: 16.02.2004
Автор: Руднєв Юрій Миколайович
Мітки: літального, крило, апарата
Формула / Реферат:
Крило літального апарата, що включає профіль, утворений верхньою і нижньою поверхнями, яке відрізняється тим, що профіль виконаний у вигляді клина, зміщеного від передньої кромки крила і який звужується до задньої кромки крила, а на нижній поверхні профілю по довжині крила закріплені аеродинамічні гребені.
Рушій літального апарата
Номер патенту: 57505
Опубліковано: 16.06.2003
Автор: Корнійчук Микола Федорович
МПК: B64C 11/00, B64C 27/32
Мітки: апарата, рушій, літального
Формула / Реферат:
1. Рушій літального апарата, що містить раму з напрямними, ведучий і ведений вали з зірочками, з'єднаними замкнутою гнучкою передачею, до ланок якої одними кінцями рівномірно прикріплені осі з лопатями і механізмами установки кутів атаки лопатей у вигляді важелів, які одними кінцями прикріплені до лопатей, а другими шарнірно з’єднані з приводом у вигляді замкнутої гнучкої передачі; осі другими кінцями опираються при допомозі опорних елементів...
Система протиобледеніння літального апарата
Номер патенту: 50674
Опубліковано: 15.10.2002
Автори: Жихарев Володимир Якович, Торчило Віталій Микитович, Шилова Тетяна Вікторівна, Кас'ян Ольга Викторівна, Чечуй Олександр Вікторович
МПК: B64D 15/00
Мітки: протиобледеніння, система, апарата, літального
Формула / Реферат:
Система протиобледеніння літального апарата, яка має n датчиків струму, n контакторів, n нагрівальних елементів, пристрій управління, джерело живлення, до якого через відповідні контактори підключені нагрівальні елементи, яка відрізняється тим, що містить n формувачів імпульсів, n детекторів фронту і n детекторів спаду, причому виходи і-го датчика струму з'єднані з входами і-го формувача імпульсів, вихід якого з'єднаний через і-тий детектор...
Адаптивна система протиобледеніння літального апарата
Номер патенту: 50673
Опубліковано: 15.10.2002
Автори: Чечуй Олександр Вікторович, Торчило Віталій Микитович, Кас'ян Ольга Викторівна, Жихарев Володимир Якович, Шилова Тетяна Вікторівна
МПК: B64D 15/00
Мітки: протиобледеніння, апарата, літального, адаптивна, система
Формула / Реферат:
Адаптивна система протиобледеніння літального апарата, яка має n контакторів, n нагрівальних елементів, джерело живлення, до якого через відповідні контактори підключені нагрівальні елементи, n індикаторів відмови, яка відрізняється тим, що містить блок пам'яті, двійковий лічильник, генератор імпульсів, причому вихід і-го індикатора відмови з'єднаний з і-им входом блока пам'яті, вихід генератора імпульсів з'єднаний з рахунковим входом...
Попередній патент: Система реєстрації та збереження польотної інформації
Наступний патент: Колісний бронетранспортер
Випадковий патент: Зразок для дослідження триботехнічних властивостей матеріалів і покриттів при ударних навантаженнях