Лінійний індукторний електродвигун

Формула / Реферат
Линейный индукторный электродвигатель, содержащий ферромагнитный зубча тый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг, отличающийся тем, что подвижный элемент снабжен третьим фазным электромагнитным модулем, причем первый электромагнитный модуль смещен относительно второго на - (n + 1/3)·. ![]() , а третий относительно второго - на + (n +1/3) .
, а третий относительно второго - на + (n +1/3) . ![]() , где n - любое целое число, а
, где n - любое целое число, а ![]() - шаг зубцовой зоны двигателя.
- шаг зубцовой зоны двигателя.
Текст
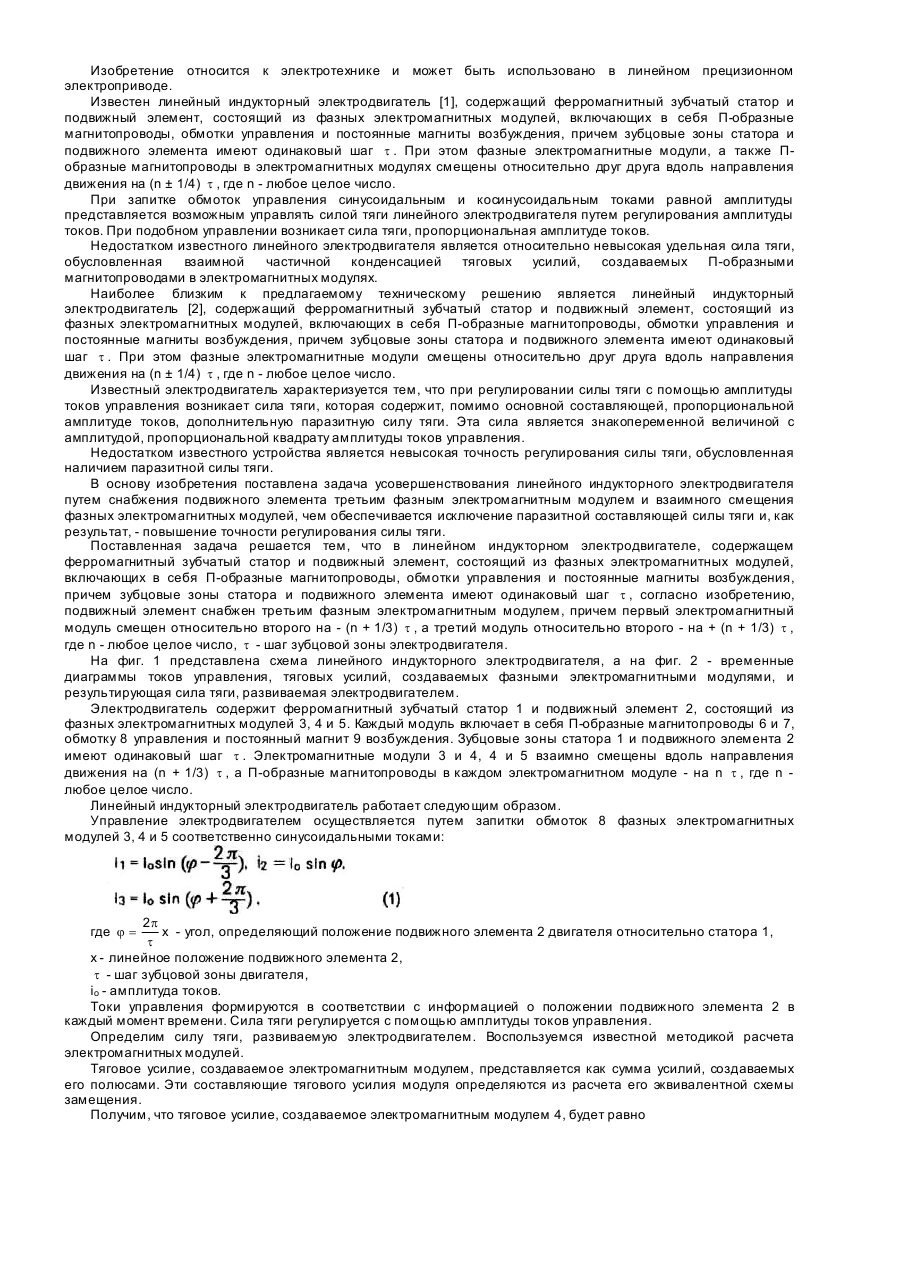
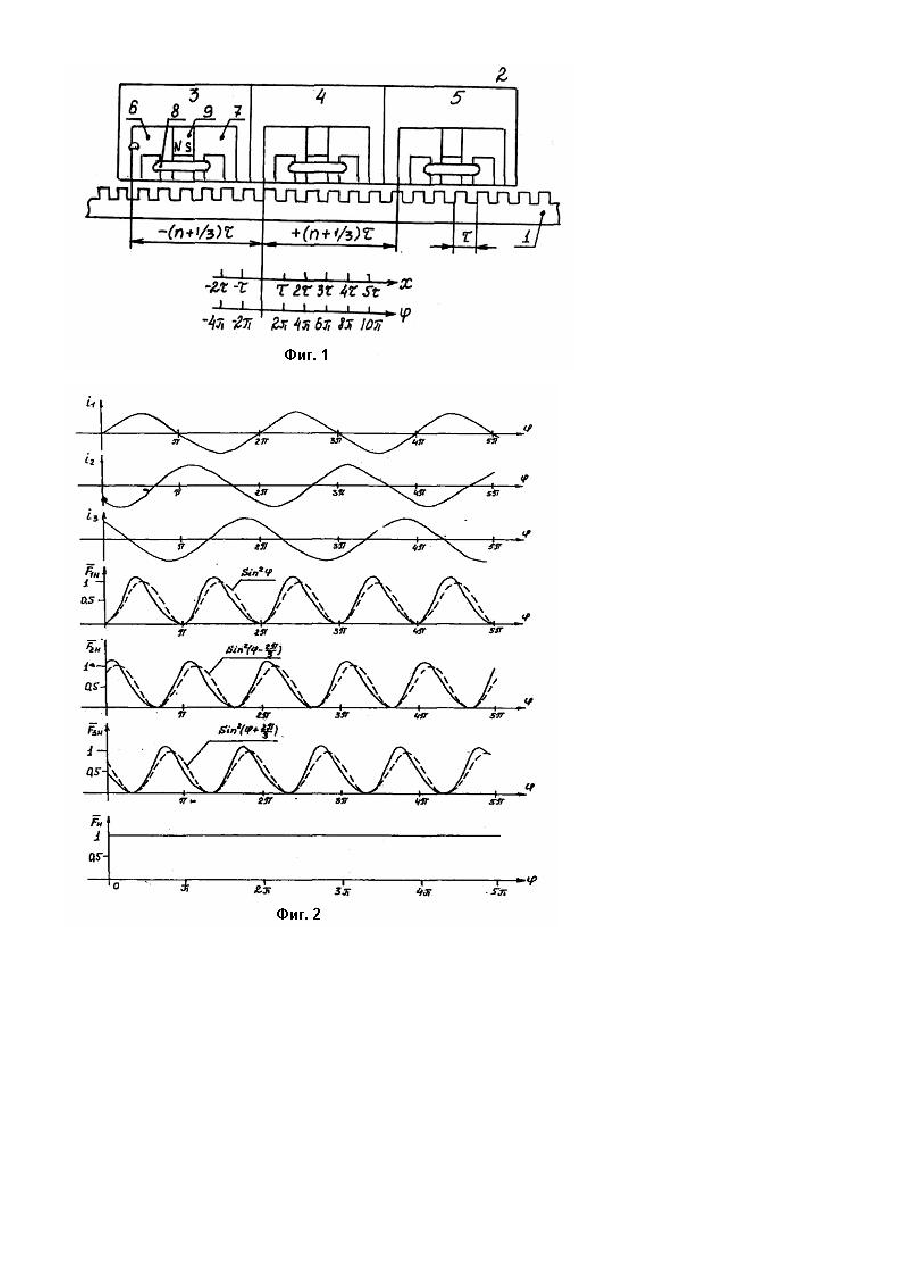
Изобретение относится к электротехнике и может быть использовано в линейном прецизионном электроприводе. Известен линейный индукторный электродвигатель [1], содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг t . При этом фазные электромагнитные модули, а также Побразные магнитопроводы в электромагнитных модулях смещены относительно друг друга вдоль направления движения на (n ± 1/4) t , где n - любое целое число. При запитке обмоток управления синусоидальным и косинусоидальным токами равной амплитуды представляется возможным управлять силой тяги линейного электродвигателя путем регулирования амплитуды токов. При подобном управлении возникает сила тяги, пропорциональная амплитуде токов. Недостатком известного линейного электродвигателя является относительно невысокая удельная сила тяги, обусловленная взаимной частичной конденсацией тяговых усилий, создаваемых П-образными магнитопроводами в электромагнитных модулях. Наиболее близким к предлагаемому техническому решению является линейный индукторный электродвигатель [2], содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг t . При этом фазные электромагнитные модули смещены относительно друг друга вдоль направления движения на (n ± 1/4) t , где n - любое целое число. Известный электродвигатель характеризуется тем, что при регулировании силы тяги с помощью амплитуды токов управления возникает сила тяги, которая содержит, помимо основной составляющей, пропорциональной амплитуде токов, дополнительную паразитную силу тяги. Эта сила является знакопеременной величиной с амплитудой, пропорциональной квадрату амплитуды токов управления. Недостатком известного устройства является невысокая точность регулирования силы тяги, обусловленная наличием паразитной силы тяги. В основу изобретения поставлена задача усовершенствования линейного индукторного электродвигателя путем снабжения подвижного элемента третьим фазным электромагнитным модулем и взаимного смещения фазных электромагнитных модулей, чем обеспечивается исключение паразитной составляющей силы тяги и, как результат, - повышение точности регулирования силы тяги. Поставленная задача решается тем, что в линейном индукторном электродвигателе, содержащем ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг t , согласно изобретению, подвижный элемент снабжен третьим фазным электромагнитным модулем, причем первый электромагнитный модуль смещен относительно второго на - (n + 1/3) t , а третий модуль относительно второго - на + (n + 1/3) t , где n - любое целое число, t - шаг зубцовой зоны электродвигателя. На фиг. 1 представлена схема линейного индукторного электродвигателя, а на фиг. 2 - временные диаграммы токов управления, тяговых усилий, создаваемых фазными электромагнитными модулями, и результирующая сила тяги, развиваемая электродвигателем. Электродвигатель содержит ферромагнитный зубчатый статор 1 и подвижный элемент 2, состоящий из фазных электромагнитных модулей 3, 4 и 5. Каждый модуль включает в себя П-образные магнитопроводы 6 и 7, обмотку 8 управления и постоянный магнит 9 возбуждения. Зубцовые зоны статора 1 и подвижного элемента 2 имеют одинаковый шаг t . Электромагнитные модули 3 и 4, 4 и 5 взаимно смещены вдоль направления движения на (n + 1/3) t , а П-образные магнитопроводы в каждом электромагнитном модуле - на n t , где n любое целое число. Линейный индукторный электродвигатель работает следующим образом. Управление электродвигателем осуществляется путем запитки обмоток 8 фазных электромагнитных модулей 3, 4 и 5 соответственно синусоидальными токами: 2p x - угол, определяющий положение подвижного элемента 2 двигателя относительно статора 1, t x - линейное положение подвижного элемента 2, t - шаг зубцовой зоны двигателя, iο - амплитуда токов. Токи управления формируются в соответствии с информацией о положении подвижного элемента 2 в каждый момент времени. Сила тяги регулируется с помощью амплитуды токов управления. Определим силу тяги, развиваемую электродвигателем. Воспользуемся известной методикой расчета электромагнитных модулей. Тяговое усилие, создаваемое электромагнитным модулем, представляется как сумма усилий, создаваемых его полюсами. Эти составляющие тягового усилия модуля определяются из расчета его эквивалентной схемы замещения. Получим, что тяговое усилие, создаваемое электромагнитным модулем 4, будет равно где j = l m и ls - вн утренняя магнитная проводимость и проводимость рассеяния постоянного магнита 9, Fm - МДС постоянного магнита 9, g0 и g1- постоянная составляющая и амплитуда изменения магнитной проводимости зазора, W - число ви тков обмотки 8 управления. Учитывая, что электромагнитные модули 3 и 5 смещены относительно модуля 4 вдоль направления движения на - (n + 1/3) t и на + (n + 1/3) t , а токи управления i1 и і3 смещены относительно тока i2 по фазе на 2p 2p углы и + соответственно, тяговые усилия, создаваемые модулями 3 и 5, определим из выражения (2) 3 3 æ 2p ö æ 2p ö путем замены аргумента φ на ç j ÷ и на ç j + ÷ соответственно. Получим,что 3 ø 3 ø è è Из анализа полученных результатов (2)-(4) следует, что тяговое усилие, создаваемое каждым электромагнитным модулем, содержит основную и паразитную составляющие. Паразитные составляющие электромагнитных модулей создают две системы взаимокомпенсирующи хся усилий, а основные составляющие суммируются, формируя силу тяги электродвигателя, равную Для иллюстрации на фиг. 2 приведены зависимости токов управления, тяговых усилий, создаваемых фазными электромагнитными модулями, а также результирующей силы тяги электродвигателя, равной сумме усилий все х электромагнитных модулей для случая, когда отношение коэффициентов f1/f o = 0,2 Теперь определим силу тяги, развиваемую известным электродвигателем. Фазные электромагнитные модули известного электродвигателя создают тяговые усилия Следовательно, сила тяги известного электродвигателя будет равной Полученные результаты (5) и (6) непосредственно подтверждают преимущество предлагаемого линейного электродвигателя, поскольку развиваемая им сила тяги пропорциональна амплитуде токов управления и не содержит паразитной силы тяги. При этом удельная сила тяги остается неизменной, Таким образом, снабжение подвижного элемента известного линейного индукторного электродвигателя третьим фазным электромагнитным модулем и выполнение фазных электромагнитных модулей с указанным смещением относительно друг друга вдоль направления движения позволяет в сравнении с известным электродвигателем повысить точность регулирования силы тяги, при этом удельная сила тяги остается неизменной.
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear inductor motor
Автори англійськоюYaroslavtsev Mykhailo Ivanovych
Назва патенту російськоюЛинейный индукторный электродвигатель
Автори російськоюЯрославцев Михаил Иванович
МПК / Мітки
МПК: H02K 41/03
Мітки: індукторний, електродвигун, лінійний
Код посилання
<a href="https://ua.patents.su/3-2926-linijjnijj-induktornijj-elektrodvigun.html" target="_blank" rel="follow" title="База патентів України">Лінійний індукторний електродвигун</a>
Лінійний індукторний двигун
Номер патенту: 3221
Опубліковано: 26.12.1994
Автори: Зільберт Ігор Михайлович, Ярославцев Михайло Іванович, Волков Геннадій Дмитрович
МПК: H02K 41/03
Мітки: двигун, лінійний, індукторний
Формула / Реферат:
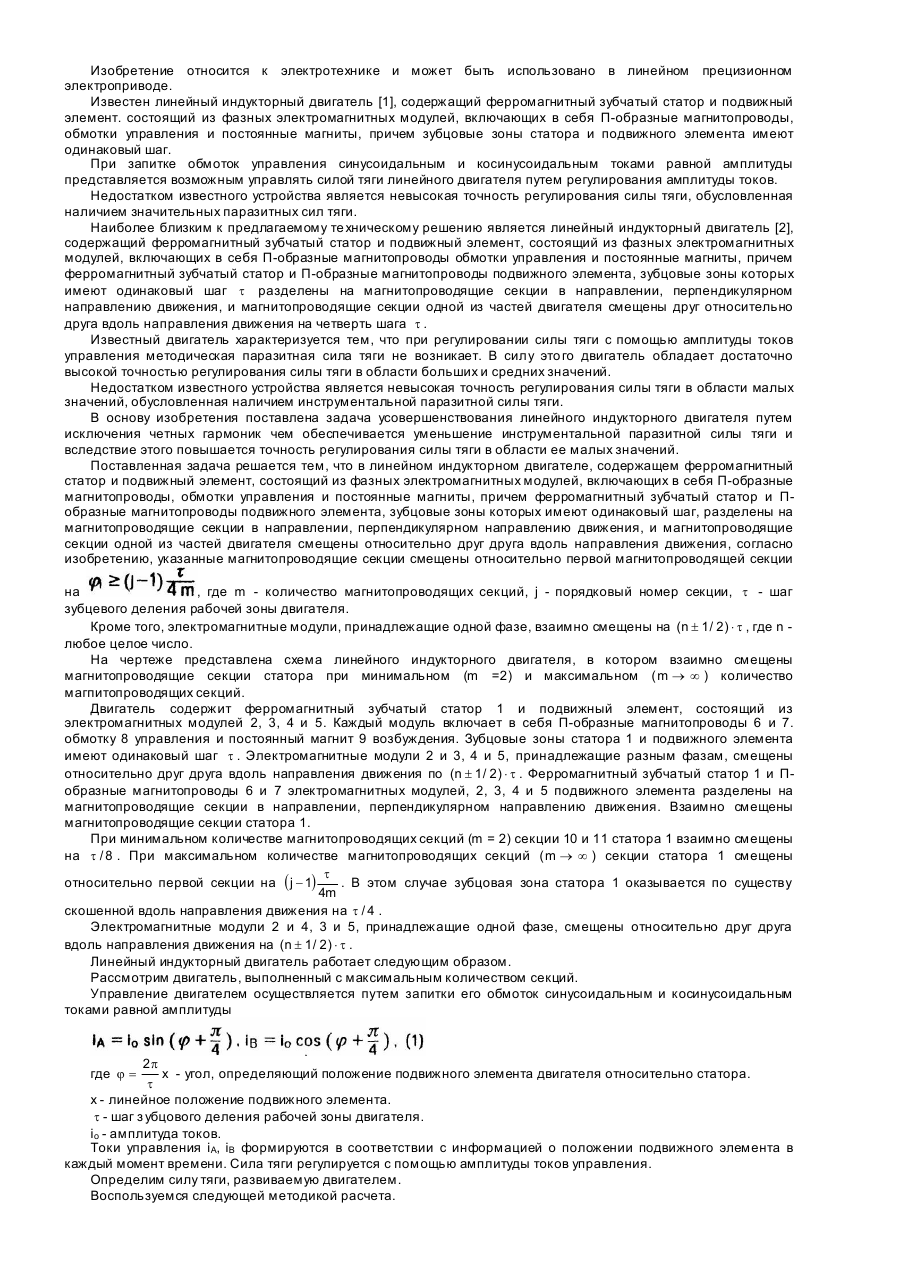
1. Линейный индукторный двигатель, содержащий ферромагнитный статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающий в себя П-образные магнитопроводы, обмотки управления и постоянные магниты, причем ферромагнитный зубчатый статор и П-образные магнитопроводы подвижного элемента, зубцовые зоны которых имеют одинаковый шаг, разделены на магнитопроводящие секции в направлении, перпендикулярном направлению движения, и...
Лінійний індукторний двигун
Номер патенту: 1825
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02K 41/02
Мітки: двигун, лінійний, індукторний
Формула / Реферат:
1. Линейный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, отличающийся тем, что, с целью повышения точности регулирования силы тяги, по крайней мере два магнитопроводящих элемента, принадлежащие одной фазе, смещены друг относительно друга вдоль направления...
Лінійний кроковий електродвигун

Номер патенту: 2136
Опубліковано: 26.12.1994
Автори: Ненека Мирослав Федорович, Завгородній Віктор Дмитрович
МПК: H02K 41/03
Мітки: лінійний, кроковий, електродвигун
Формула / Реферат:
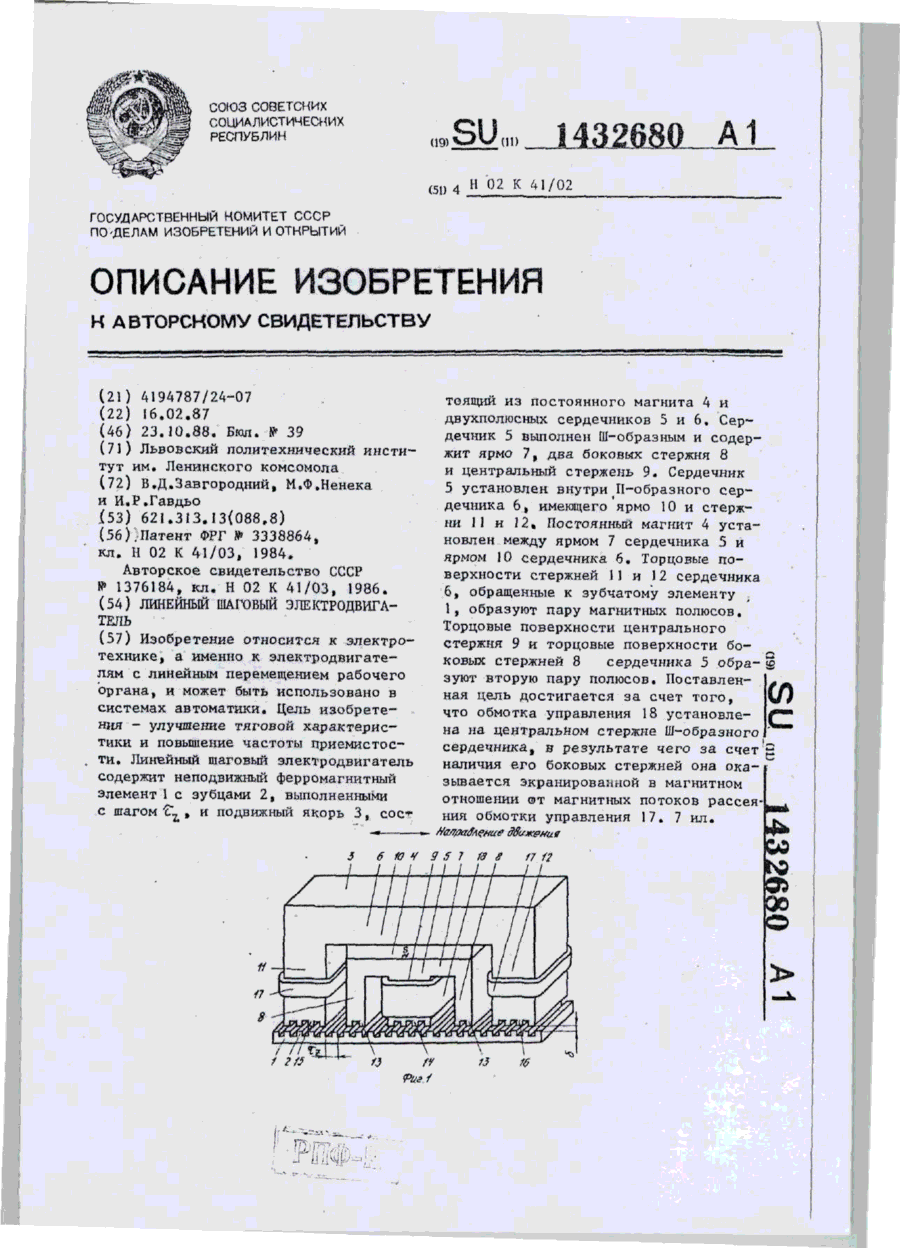
Линейный шаговый электродвигатель, содержащий зубчатый ферромагнитный индуктор и якорь, состоящий из двух П-образных сердечников с зубчатыми полюсами, на которых расположены обмотки управления, и постоянного магнита, установленного между сердечниками, отличающийся тем, что, с целью повышения точности позиционирования, один П-образный сердечник расположен в другом с возможностью их взаимного смещения относительно полюсов, при этом...
Лінійний кроковий електродвигун
Номер патенту: 2137
Опубліковано: 26.12.1994
Автори: Ненека Мирослав Федорович, Завгородній Віктор Дмитрович, Гавдьо Ігор Романович
МПК: H02K 41/02
Мітки: кроковий, електродвигун, лінійний
Формула / Реферат:
Линейный шаговый электродвигатель, содержащий ферромагнитный зубчатый элемент с шагом зубцов tz и якорь, состоящий из охватывающего и охваченного двухполюсных сердечников с установленными на них обмотками управления постоянного магнита, расположенного между ярмами сердечников, причем на торцовых поверхностях стержней сердечников, обращенных к зубчатому элементу, выполнены группы зубцов с шагом tz, отличающийся тем, что, с целью улучшения...
Спосіб передачі та прийому команд управління по проводах трифазної мережі соколова в.ф.
Номер патенту: 1080
Опубліковано: 30.12.1993
Автор: Соколов Вячеслав Федорович
МПК: G08C 19/02
Мітки: трифазної, управління, прийому, проводах, спосіб, мережі, соколова, в.ф, передачі, команд
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Способ передачи и приема команд управления по проводам трехфазной сети, основанный на формировании команды управления из сигнала заданной полуволны напряжения переменного тока в одном из фазных проводов трехфазной сети, передаче команды управления по одному из фазных проводов трехфазной сети, приеме команды управления и преобразовании ее в сигнал управления исполнительным элементом, о т л и ч а ю щ...
Попередній патент: Спосіб керування кровлею
Наступний патент: Інтегральний перетворювач тиску
Випадковий патент: Спосіб електровимірювальної оцінки іскробезпечності індуктивних електричних ланцюгів змінного та пульсуючого постійного струму