Пристрій для автоматизованого визначення координат тривимірної криволінійної поверхні об’єкта
Номер патенту: 31774
Опубліковано: 25.04.2008
Автори: Олефір Ганна Олексіївна, Астанін В'ячеслав Валентинович
Формула / Реферат
Пристрій для автоматизованого визначення координат тривимірної криволінійної поверхні об'єкта, що містить вимірювальний наконечник для контакту зі сканованою поверхнею, циліндричний напрямний стрижень з рухомим відносно нього повзуном, датчик переміщення повзуна відносно поверхні напрямного стрижня, розташований безпосередньо на повзуні, і вузол кріплення пристрою на сканованій поверхні, який відрізняється тим, що датчик переміщення повзуна відносно поверхні напрямного стрижня виконаний у вигляді блока реєстрації положень вимірювального наконечника, що включає елемент підсвічування поверхні напрямного стрижня, з'єднаний з виходом блока керування елементом підсвічування поверхні напрямного стрижня, систему фокусуючих світло підсвічування поверхні напрямного стрижня лінз, систему лінз, фокусуючих відображене від поверхні напрямного стрижня світло підсвічування на світлочутливу матрицю блока отримання зображень, з'єднаного з блоком процесора обробки зображень, вихід якого підключено до входу блока отримання і кодування даних від процесора обробки зображень про переміщення блока реєстрації положень вимірювального наконечника відносно напрямного стрижня для їх передачі на вхід блока виведення інформації на дисплей оперативної індикації результатів вимірювань та на вхід блока безпроводової передачі отриманих даних до електронного обчислювального блока розшифровки сигналу і збереження, обробки та аналізу отриманої інформації, причому блок керування елементом підсвічування поверхні напрямного стрижня, блок отримання зображень, блок процесора обробки зображень, блок отримання і кодування даних від процесора обробки зображень про переміщення блока реєстрації положень вимірювального наконечника відносно напрямного стрижня, блок виведення інформації на дисплей оперативної індикації результатів вимірювань та блок безпроводової передачі отриманих даних підключені до виходу блока живлення і виходу блока задавального кварцового генератора сигналу для синхронізації обчислювальних процесів, з'єднаного з виходом блока живлення.
Текст
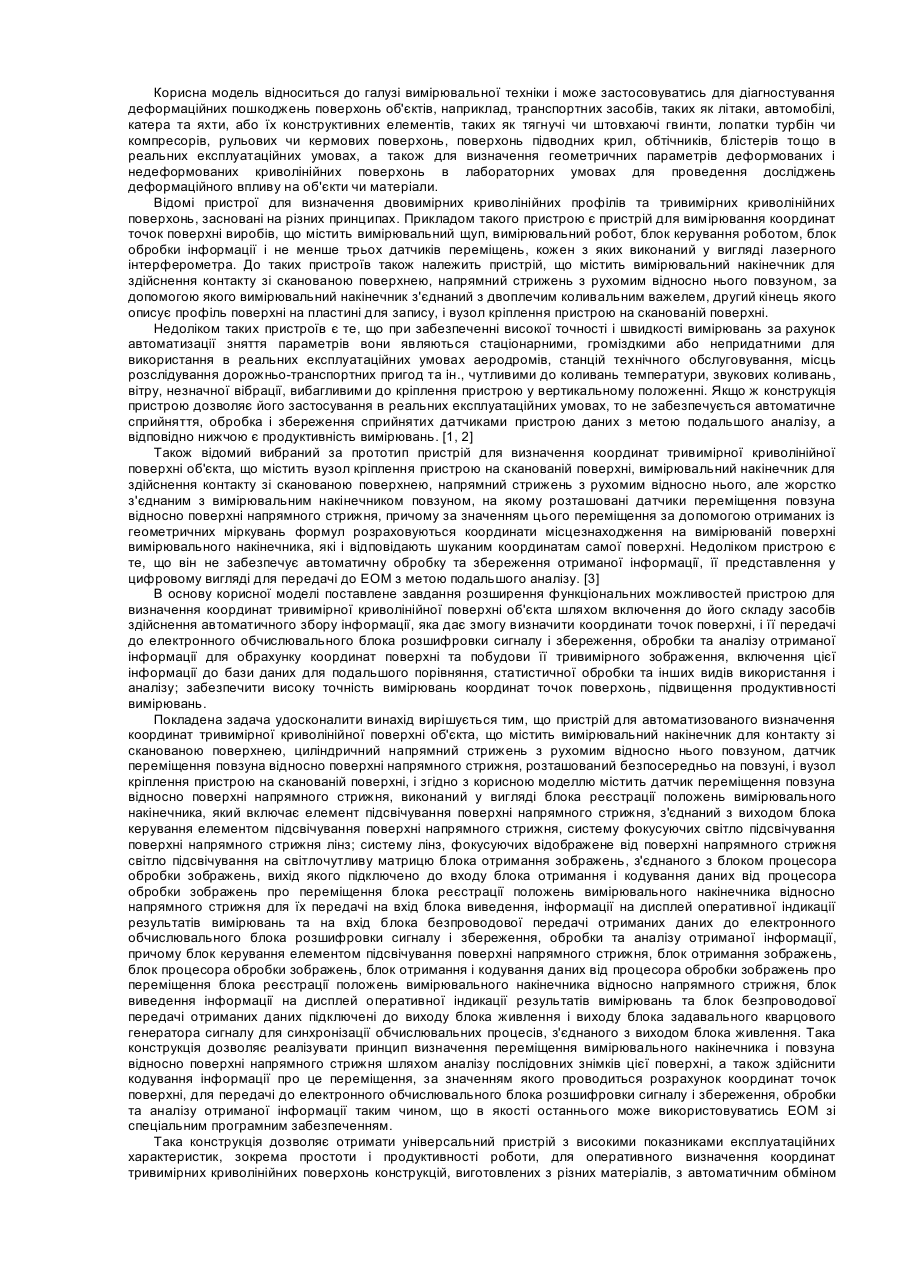
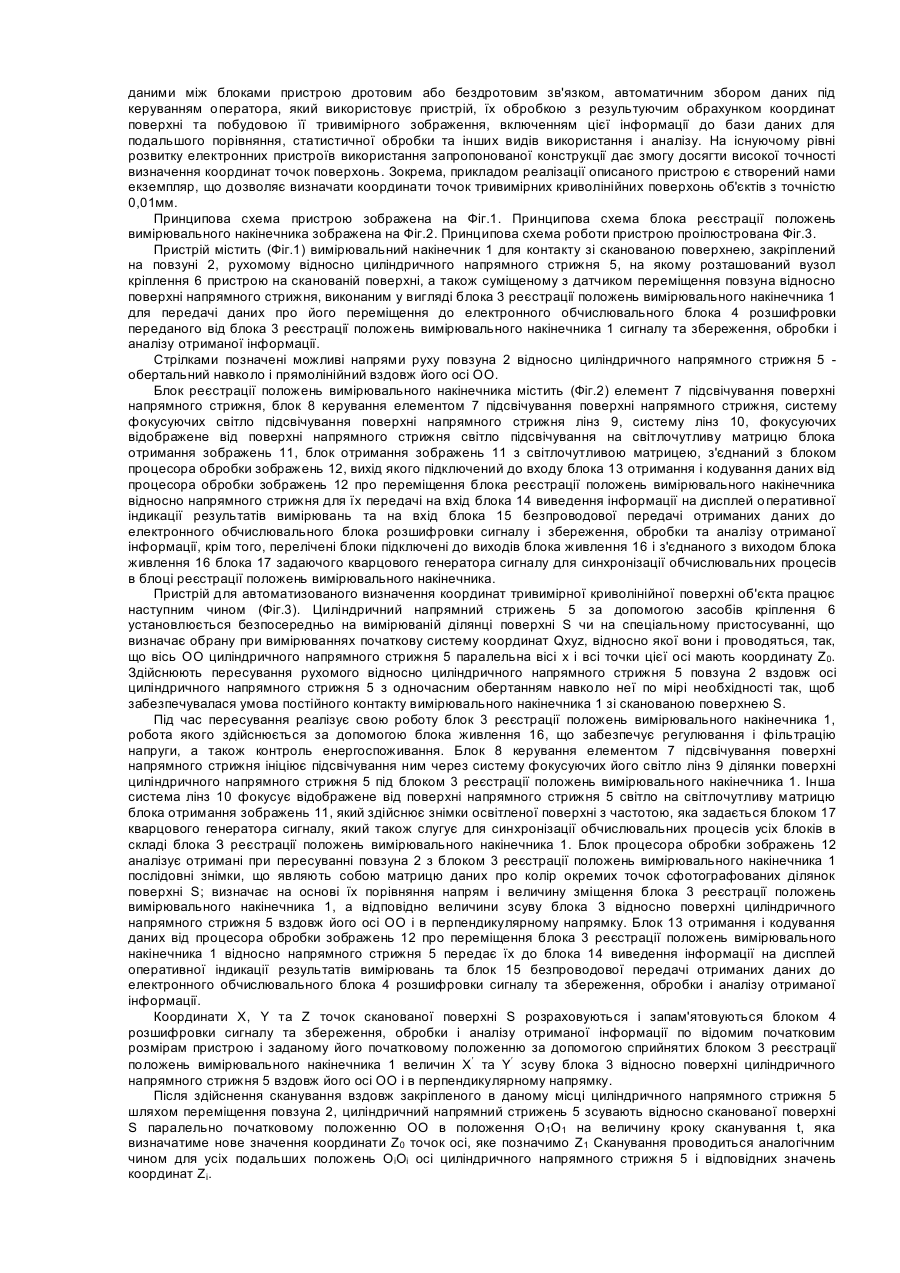
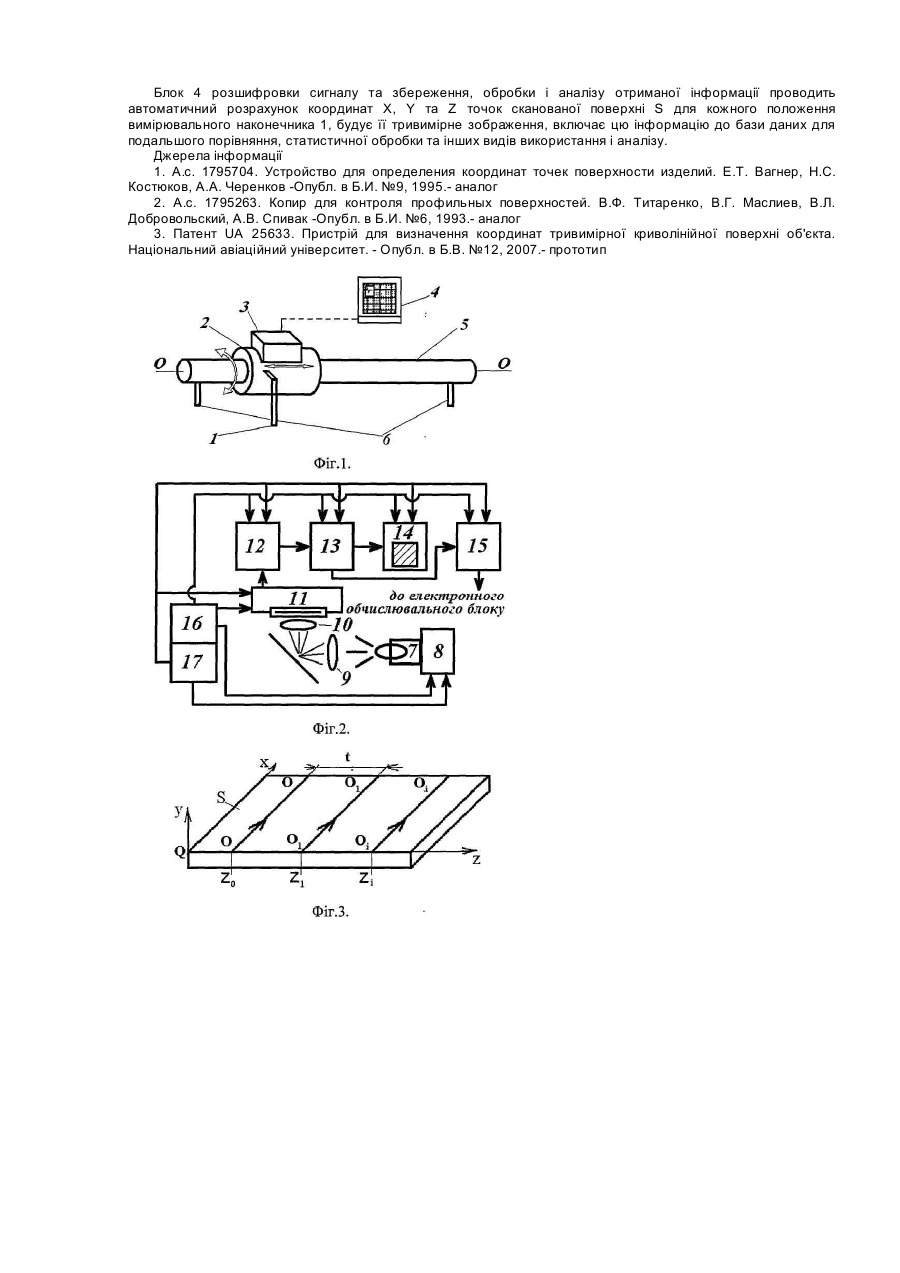
Корисна модель відноситься до галузі вимірювальної техніки і може застосовуватись для діагностування деформаційних пошкоджень поверхонь об'єктів, наприклад, транспортних засобів, таких як літаки, автомобілі, катера та яхти, або їх конструктивних елементів, таких як тягнучі чи штовхаючі гвинти, лопатки турбін чи компресорів, рульових чи кермових поверхонь, поверхонь підводних крил, обтічників, блістерів тощо в реальних експлуатаційних умовах, а також для визначення геометричних параметрів деформованих і недеформованих криволінійних поверхонь в лабораторних умовах для проведення досліджень деформаційного впливу на об'єкти чи матеріали. Відомі пристрої для визначення двовимірних криволінійних профілів та тривимірних криволінійних поверхонь, засновані на різних принципах. Прикладом такого пристрою є пристрій для вимірювання координат точок поверхні виробів, що містить вимірювальний щуп, вимірювальний робот, блок керування роботом, блок обробки інформації і не менше трьох датчиків переміщень, кожен з яких виконаний у вигляді лазерного інтерферометра. До таких пристроїв також належить пристрій, що містить вимірювальний накінечник для здійснення контакту зі сканованою поверхнею, напрямний стрижень з рухомим відносно нього повзуном, за допомогою якого вимірювальний накінечник з'єднаний з двоплечим коливальним важелем, другий кінець якого описує профіль поверхні на пластині для запису, і вузол кріплення пристрою на сканованій поверхні. Недоліком таких пристроїв є те, що при забезпеченні високої точності і швидкості вимірювань за рахунок автоматизації зняття параметрів вони являються стаціонарними, громіздкими або непридатними для використання в реальних експлуатаційних умовах аеродромів, станцій технічного обслуговування, місць розслідування дорожньо-транспортних пригод та ін., чутливими до коливань температури, звукових коливань, вітру, незначної вібрації, вибагливими до кріплення пристрою у вертикальному положенні. Якщо ж конструкція пристрою дозволяє його застосування в реальних експлуатаційних умовах, то не забезпечується автоматичне сприйняття, обробка і збереження сприйнятих датчиками пристрою даних з метою подальшого аналізу, а відповідно нижчою є продуктивність вимірювань. [1, 2] Також відомий вибраний за прототип пристрій для визначення координат тривимірної криволінійної поверхні об'єкта, що містить вузол кріплення пристрою на сканованій поверхні, вимірювальний накінечник для здійснення контакту зі сканованою поверхнею, напрямний стрижень з рухомим відносно нього, але жорстко з'єднаним з вимірювальним накінечником повзуном, на якому розташовані датчики переміщення повзуна відносно поверхні напрямного стрижня, причому за значенням цього переміщення за допомогою отриманих із геометричних міркувань формул розраховуються координати місцезнаходження на вимірюваній поверхні вимірювального накінечника, які і відповідають шуканим координатам самої поверхні. Недоліком пристрою є те, що він не забезпечує автоматичну обробку та збереження отриманої інформації, її представлення у цифровому вигляді для передачі до ЕОМ з метою подальшого аналізу. [3] В основу корисної моделі поставлене завдання розширення функціональних можливостей пристрою для визначення координат тривимірної криволінійної поверхні об'єкта шляхом включення до його складу засобів здійснення автоматичного збору інформації, яка дає змогу визначити координати точок поверхні, і її передачі до електронного обчислювального блока розшифровки сигналу і збереження, обробки та аналізу отриманої інформації для обрахунку координат поверхні та побудови її тривимірного зображення, включення цієї інформації до бази даних для подальшого порівняння, статистичної обробки та інших видів використання і аналізу; забезпечити високу точність вимірювань координат точок поверхонь, підвищення продуктивності вимірювань. Покладена задача удосконалити винахід вирішується тим, що пристрій для автоматизованого визначення координат тривимірної криволінійної поверхні об'єкта, що містить вимірювальний накінечник для контакту зі сканованою поверхнею, циліндричний напрямний стрижень з рухомим відносно нього повзуном, датчик переміщення повзуна відносно поверхні напрямного стрижня, розташований безпосередньо на повзуні, і вузол кріплення пристрою на сканованій поверхні, і згідно з корисною моделлю містить датчик переміщення повзуна відносно поверхні напрямного стрижня, виконаний у вигляді блока реєстрації положень вимірювального накінечника, який включає елемент підсвічування поверхні напрямного стрижня, з'єднаний з виходом блока керування елементом підсвічування поверхні напрямного стрижня, систему фокусуючих світло підсвічування поверхні напрямного стрижня лінз; систему лінз, фокусуючих відображене від поверхні напрямного стрижня світло підсвічування на світлочутливу матрицю блока отримання зображень, з'єднаного з блоком процесора обробки зображень, вихід якого підключено до входу блока отримання і кодування даних від процесора обробки зображень про переміщення блока реєстрації положень вимірювального накінечника відносно напрямного стрижня для їх передачі на вхід блока виведення, інформації на дисплей оперативної індикації результатів вимірювань та на вхід блока безпроводової передачі отриманих даних до електронного обчислювального блока розшифровки сигналу і збереження, обробки та аналізу отриманої інформації, причому блок керування елементом підсвічування поверхні напрямного стрижня, блок отримання зображень, блок процесора обробки зображень, блок отримання і кодування даних від процесора обробки зображень про переміщення блока реєстрації положень вимірювального накінечника відносно напрямного стрижня, блок виведення інформації на дисплей оперативної індикації результатів вимірювань та блок безпроводової передачі отриманих даних підключені до виходу блока живлення і виходу блока задавального кварцового генератора сигналу для синхронізації обчислювальних процесів, з'єднаного з виходом блока живлення. Така конструкція дозволяє реалізувати принцип визначення переміщення вимірювального накінечника і повзуна відносно поверхні напрямного стрижня шляхом аналізу послідовних знімків цієї поверхні, а також здійснити кодування інформації про це переміщення, за значенням якого проводиться розрахунок координат точок поверхні, для передачі до електронного обчислювального блока розшифровки сигналу і збереження, обробки та аналізу отриманої інформації таким чином, що в якості останнього може використовуватись ЕОМ зі спеціальним програмним забезпеченням. Така конструкція дозволяє отримати універсальний пристрій з високими показниками експлуатаційних характеристик, зокрема простоти і продуктивності роботи, для оперативного визначення координат тривимірних криволінійних поверхонь конструкцій, виготовлених з різних матеріалів, з автоматичним обміном даними між блоками пристрою дротовим або бездротовим зв'язком, автоматичним збором даних під керуванням оператора, який використовує пристрій, їх обробкою з результуючим обрахунком координат поверхні та побудовою її тривимірного зображення, включенням цієї інформації до бази даних для подальшого порівняння, статистичної обробки та інших видів використання і аналізу. На існуючому рівні розвитку електронних пристроїв використання запропонованої конструкції дає змогу досягти високої точності визначення координат точок поверхонь. Зокрема, прикладом реалізації описаного пристрою є створений нами екземпляр, що дозволяє визначати координати точок тривимірних криволінійних поверхонь об'єктів з точністю 0,01мм. Принципова схема пристрою зображена на Фіг.1. Принципова схема блока реєстрації положень вимірювального накінечника зображена на Фіг.2. Принципова схема роботи пристрою проілюстрована Фіг.3. Пристрій містить (Фіг.1) вимірювальний накінечник 1 для контакту зі сканованою поверхнею, закріплений на повзуні 2, рухомому відносно циліндричного напрямного стрижня 5, на якому розташований вузол кріплення 6 пристрою на сканованій поверхні, а також суміщеному з датчиком переміщення повзуна відносно поверхні напрямного стрижня, виконаним у вигляді блока 3 реєстрації положень вимірювального накінечника 1 для передачі даних про його переміщення до електронного обчислювального блока 4 розшифровки переданого від блока 3 реєстрації положень вимірювального накінечника 1 сигналу та збереження, обробки і аналізу отриманої інформації. Стрілками позначені можливі напрями руху повзуна 2 відносно циліндричного напрямного стрижня 5 обертальний навколо і прямолінійний вздовж його осі ОО. Блок реєстрації положень вимірювального накінечника містить (Фіг.2) елемент 7 підсвічування поверхні напрямного стрижня, блок 8 керування елементом 7 підсвічування поверхні напрямного стрижня, систему фокусуючих світло підсвічування поверхні напрямного стрижня лінз 9, систему лінз 10, фокусуючих відображене від поверхні напрямного стрижня світло підсвічування на світлочутливу матрицю блока отримання зображень 11, блок отримання зображень 11 з світлочутливою матрицею, з'єднаний з блоком процесора обробки зображень 12, вихід якого підключений до входу блока 13 отримання і кодування даних від процесора обробки зображень 12 про переміщення блока реєстрації положень вимірювального накінечника відносно напрямного стрижня для їх передачі на вхід блока 14 виведення інформації на дисплей оперативної індикації результатів вимірювань та на вхід блока 15 безпроводової передачі отриманих даних до електронного обчислювального блока розшифровки сигналу і збереження, обробки та аналізу отриманої інформації, крім того, перелічені блоки підключені до виходів блока живлення 16 і з'єднаного з виходом блока живлення 16 блока 17 задаючого кварцового генератора сигналу для синхронізації обчислювальних процесів в блоці реєстрації положень вимірювального накінечника. Пристрій для автоматизованого визначення координат тривимірної криволінійної поверхні об'єкта працює наступним чином (Фіг.3). Циліндричний напрямний стрижень 5 за допомогою засобів кріплення 6 установлюється безпосередньо на вимірюваній ділянці поверхні S чи на спеціальному пристосуванні, що визначає обрану при вимірюваннях початкову систему координат Qxyz, відносно якої вони і проводяться, так, що вісь OO циліндричного напрямного стрижня 5 паралельна вісі х і всі точки цієї осі мають координату Z0. Здійснюють пересування рухомого відносно циліндричного напрямного стрижня 5 повзуна 2 вздовж осі циліндричного напрямного стрижня 5 з одночасним обертанням навколо неї по мірі необхідності так, щоб забезпечувалася умова постійного контакту вимірювального накінечника 1 зі сканованою поверхнею S. Під час пересування реалізує свою роботу блок 3 реєстрації положень вимірювального накінечника 1, робота якого здійснюється за допомогою блока живлення 16, що забезпечує регулювання і фільтрацію напруги, а також контроль енергоспоживання. Блок 8 керування елементом 7 підсвічування поверхні напрямного стрижня ініціює підсвічування ним через систему фокусуючих його світло лінз 9 ділянки поверхні циліндричного напрямного стрижня 5 під блоком 3 реєстрації положень вимірювального накінечника 1. Інша система лінз 10 фокусує відображене від поверхні напрямного стрижня 5 світло на світлочутливу матрицю блока отримання зображень 11, який здійснює знімки освітленої поверхні з частотою, яка задається блоком 17 кварцового генератора сигналу, який також слугує для синхронізації обчислювальних процесів усіх блоків в складі блока З реєстрації положень вимірювального накінечника 1. Блок процесора обробки зображень 12 аналізує отримані при пересуванні повзуна 2 з блоком 3 реєстрації положень вимірювального накінечника 1 послідовні знімки, що являють собою матрицю даних про колір окремих точок сфотографованих ділянок поверхні S; визначає на основі їх порівняння напрям і величину зміщення блока 3 реєстрації положень вимірювального накінечника 1, а відповідно величини зсуву блока 3 відносно поверхні циліндричного напрямного стрижня 5 вздовж його осі OO і в перпендикулярному напрямку. Блок 13 отримання і кодування даних від процесора обробки зображень 12 про переміщення блока 3 реєстрації положень вимірювального накінечника 1 відносно напрямного стрижня 5 передає їх до блока 14 виведення інформації на дисплей оперативної індикації результатів вимірювань та блок 15 безпроводової передачі отриманих даних до електронного обчислювального блока 4 розшифровки сигналу та збереження, обробки і аналізу отриманої інформації. Координати X, Y та Z точок сканованої поверхні S розраховуються і запам'ятовуються блоком 4 розшифровки сигналу та збереження, обробки і аналізу отриманої інформації по відомим початковим розмірам пристрою і заданому його початковому положенню за допомогою сприйнятих блоком 3 реєстрації положень вимірювального накінечника 1 величин X¢ та Y¢ зсуву блока 3 відносно поверхні циліндричного напрямного стрижня 5 вздовж його осі OO і в перпендикулярному напрямку. Після здійснення сканування вздовж закріпленого в даному місці циліндричного напрямного стрижня 5 шляхом переміщення повзуна 2, циліндричний напрямний стрижень 5 зсувають відносно сканованої поверхні S паралельно початковому положенню OO в положення О1О1 на величину кроку сканування t, яка визначатиме нове значення координати Z0 точок осі, яке позначимо Z1 Сканування проводиться аналогічним чином для усіх подальших положень OіОі осі циліндричного напрямного стрижня 5 і відповідних значень координат Zі. Блок 4 розшифровки сигналу та збереження, обробки і аналізу отриманої інформації проводить автоматичний розрахунок координат X, Y та Z точок сканованої поверхні S для кожного положення вимірювального наконечника 1, будує її тривимірне зображення, включає цю інформацію до бази даних для подальшого порівняння, статистичної обробки та інших видів використання і аналізу. Джерела інформації 1. А.с. 1795704. Устройство для определения координат точек поверхности изделий. Е.Т. Вагнер, Н.С. Костюков, А.А. Черенков -Опубл. в Б.И. №9, 1995.- аналог 2. А.с. 1795263. Копир для контроля профильных поверхностей. В.Ф. Титаренко, В.Г. Маслиев, В.Л. Добровольский, А.В. Спивак -Опубл. в Б.И. №6, 1993.- аналог 3. Патент UA 25633. Пристрій для визначення координат тривимірної криволінійної поверхні об'єкта. Національний авіаційний університет. - Опубл. в Б.В. №12, 2007.- прототип
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automated determination of coordinates of three-dimensional curvilinear surface of object
Автори англійськоюAstanin Viacheslav Valentynovych, Olefir Hanna Oleksiivna
Назва патенту російськоюУстройство для автоматизированного определения координат трехмерной криволинейной поверхности объекта
Автори російськоюАстанин Вячеслав Валентинович, Олефир Анна Алексеевна
МПК / Мітки
МПК: G01B 5/30
Мітки: тривимірної, об'єкта, координат, криволінійної, автоматизованого, поверхні, визначення, пристрій
Код посилання
<a href="https://ua.patents.su/3-31774-pristrijj-dlya-avtomatizovanogo-viznachennya-koordinat-trivimirno-krivolinijjno-poverkhni-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматизованого визначення координат тривимірної криволінійної поверхні об’єкта</a>
Пристрій для визначення координат тривимірної криволінійної поверхні об`єкта
Номер патенту: 25633
Опубліковано: 10.08.2007
Автори: Олефір Ганна Олексіївна, Астанін В'ячеслав Валентинович
МПК: G01B 5/30
Мітки: криволінійної, пристрій, тривимірної, поверхні, об'єкта, координат, визначення
Формула / Реферат:
Пристрій для визначення координат тривимірної криволінійної поверхні об'єкта, що містить вимірювальний наконечник для здійснення контакту зі сканованою поверхнею, напрямний стрижень з рухомим відносно нього повзуном і вузол кріплення пристрою на сканованій поверхні, який відрізняється тим, що напрямний стрижень виконаний циліндричним і забезпечений засобами кріплення безпосередньо на вимірюваній ділянці поверхні, а жорстко з'єднаний з...
Пристрій для визначення координат енергетичного центру зображення світлової плями
Номер патенту: 28111
Опубліковано: 26.11.2007
Автори: Кухарчук Василь Васильович, Білинський Володимир Йосипович, Білинський Йосип Йосипович
МПК: G06K 9/46
Мітки: світлової, координат, енергетичного, центру, зображення, визначення, пристрій, плями
Формула / Реферат:
Пристрій для визначення координат енергетичного центру зображення світлової плями, що містить фотоприймальний блок у вигляді фотоматриці, блок керування та обробки даних, який відрізняється тим, що в нього введено аналогово-цифровий перетворювач, вхід якого пов'язаний з виходом фотоматриці, а вихід є входом блока керування та обробки даних, системи горизонтального та вертикального зсуву, входи яких пов'язані з виходами блока керування та...
Спосіб визначення координат точок поверхні манекена
Номер патенту: 63491
Опубліковано: 15.01.2004
Автори: Славінська Алла Людвігівна, Михайловський Юрій Броніславович, Мица Вікторія Василівна
МПК: A41H 1/00
Мітки: точок, манекена, координат, визначення, поверхні, спосіб
Формула / Реферат:
Спосіб визначення координат точок поверхні манекена, який здійснюється за допомогою градуйованої платформи з манекеном, що обертається, приводів для обертання манекена та переміщення вертикального стержня, механізму фіксування координат точок, який відрізняється тим, що координати точок поверхні манекена - кут повороту манекена, величина переміщення вертикального стержня з механізмом ролика, відстань від поверхні манекена до осі обертання...
Спосіб визначення координат точок на земній поверхні
Номер патенту: 81303
Опубліковано: 25.12.2007
Автори: Шевченко Тарас Георгійович, Глотов Володимир Миколайович, Третяк Корнилій Романович
Мітки: спосіб, координат, точок, визначення, поверхні, земній
Формула / Реферат:
Спосіб визначення координат точок на земній поверхні, який полягає у тому, що встановлюють пристрій для закріплення антени GPS-приймача, встановлюють антену GPS-приймача і центрують її над закріпленою на земній поверхні точкою, з'єднують між собою елементи GPS-станції (систему живлення, приймач і антену), орієнтують антену, здійснюють ініціалізацію і виконують вимірювання, який відрізняється тим, що, за наявності перешкоди, антену...
Пристрій для визначення координат джерела випромінювання
Номер патенту: 6730
Опубліковано: 16.05.2005
Автор: Литвин Ігор Сергійович
МПК: H01L 31/08
Мітки: визначення, випромінювання, координат, джерела, пристрій
Формула / Реферат:
Пристрій визначення координат джерела випромінювання, що містить напівпровідникову структуру, виконану із шарів із різним типом провідності, оснащених електродами, попарно нанесеними на кожен шар, підключені до кожного електрода блоки реєстрації та обробки сигналів і джерело напруги, який відрізняється тим, що напівпровідникові шари структури розділені діелектричним шаром, товщина напівпровідникового шару, що опромінюється першим, вибрана із...
Попередній патент: Датчик швидкості
Наступний патент: Спосіб комплексного лікування недрібноклітинного раку легені
Випадковий патент: Спосіб проведення реовазографії регіональних судин порожнини рота