Система демпфірування кутових швидкостей космічного літального апарата
Номер патенту: 26160
Опубліковано: 10.09.2007
Автори: Колесников Геннадій Викторович, Бандура Іван Миколайович

Формула / Реферат
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між кожним датчиком і блоком керування виконавчими органами блок підключення відповідного датчика, блок визначення початку демпфірування подовжньої швидкості, перший вхід якого з'єднаний з виходом датчика першої поперечної кутової швидкості, другий вхід - з виходом датчика другої поперечної кутової швидкості, а вихід - з другим входом блока підключення датчика подовжньої кутової швидкості, другий вихід блока керування виконавчими органами подовжнього каналу з'єднаний з другими входами блоків підключення датчиків першої і другої поперечних кутових швидкостей, яка відрізняється тим, що в неї введені блок визначення потрібної подовжньої кутової швидкості, на перший вхід якого підключена величина потрібного часу демпфірування, другий і третій входи його з'єднані з виходами датчиків першої і другої поперечної кутової швидкості, блок мінімізації витрати робочого тіла, перший вхід якого з'єднаний з виходом блока визначення потрібної подовжньої кутової швидкості, другий вхід з'єднаний з виходом датчика подовжньої кутової швидкості, вихід блока мінімізації витрати робочого тіла з'єднаний з третіми входами блоків підключення датчиків, четвертий вхід блока підключення датчика подовжньої кутової швидкості з'єднаний з виходом блока визначення потрібної подовжньої кутової швидкості.
Текст
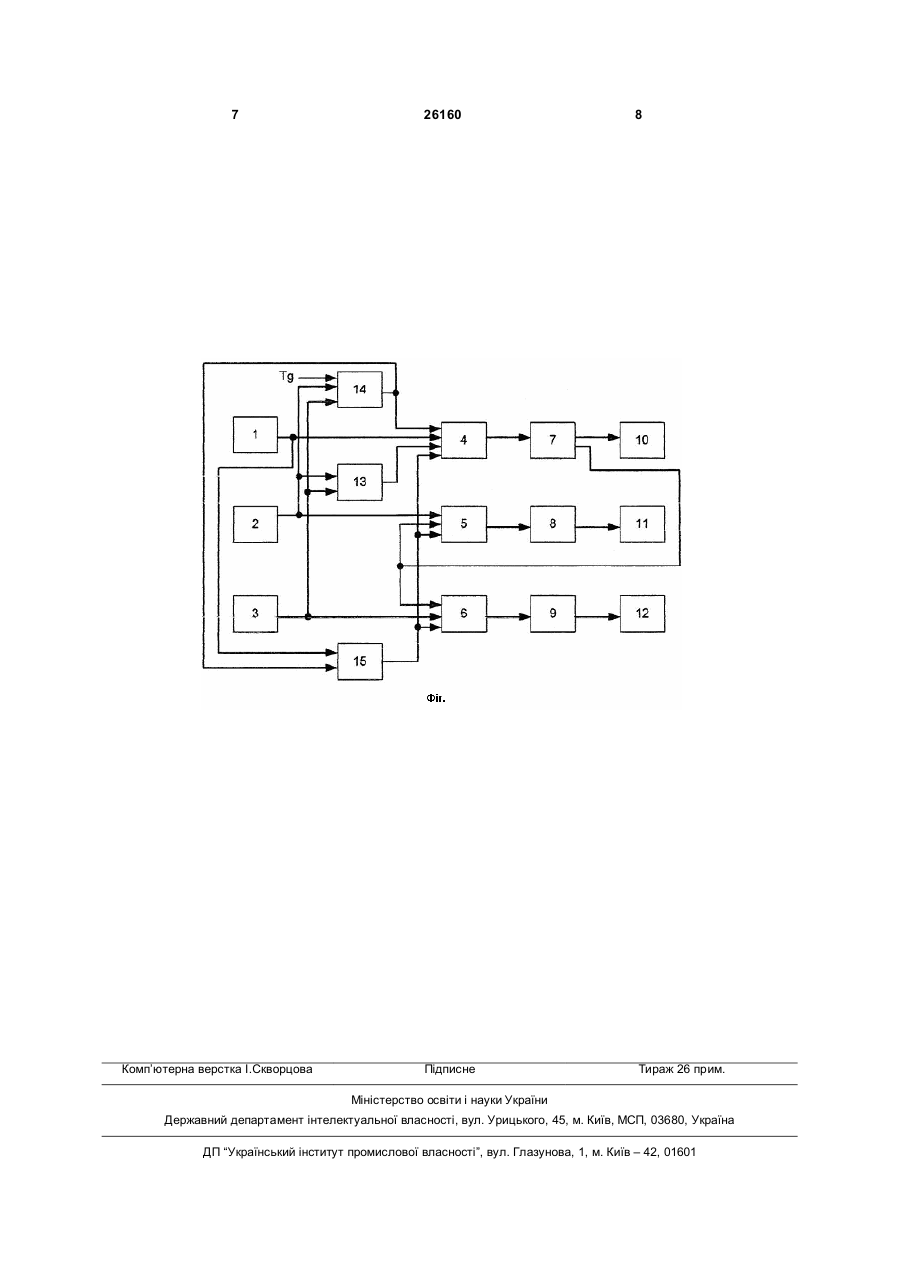
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між кожним датчиком і блоком керування виконавчими органами блок підключення відповідного датчика, блок визначення початку демпфірування подовжньої швидкості, перший вхід якого з'єднаний з виходом датчика першої U 2 (19) 1 3 другої поперечної кутової швидкості, а вихід - з другим входом блока підключення датчика подовжньої кутової швидкості, другий вихід блока керування виконавчими органами подовжнього каналу з'єднаний з другими входами блоків підключення датчиків першої і другої поперечних кутових швидкостей. Недоліком цієї системи є те, що при малих величинах початкової подовжньої кутової швидкості буде значний час демпфірування. В основу корисної моделі покладено задачу при малих величинах початкової подовжньої кутової швидкості збільшення подовжньої кутової швидкості, при якій забезпечується потрібний час демпфірування з мінімальними витратами робочого тіла. Поставлена задача вирішується тим, що в системі демпфірування кутових швидкостей космічного апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між кожним датчиком і блоком керування виконавчими органами блок підключення відповідного датчика, блок визначення початку демпфірування подовжньої швидкості, перший вхід якого з'єднаний з виходом датчика першої поперечної кутової швидкості, другий вхід - з виходом датчика другої поперечної кутової швидкості, а вихід - з другим входом блока підключення датчика подовжньої кутової швидкості, другий вихід блока керування виконавчими органами подовжнього каналу з'єднаний з другими входами блоків підключення датчиків першої і другої поперечних кутових швидкостей відповідно до корисної моделі, введені блок визначення потрібної подовжньої кутової швидкості, на перший вхід підключена величина потрібного часу демпфірування, другий і третій входи його з'єднані з виходами датчиків першої і другої поперечної кутової швидкості, блок мінімізації витрат робочого тіла, перший вхід якого з'єднаний з виходом блока визначення потрібної подовжньої кутової швидкості, другий вхід з’єднаний з виходом датчика подовжньої кутової швидкості, вихід блока мінімізації витрат робочою тіла з'єднаний з третіми входами блоків підключення датчиків, четвертий вхід блоку підключення датчика подовжньої кутової швидкості з'єднаний з виходом блока визначення потрібної подовжньої кутової швидкості. Сутність корисної моделі пояснюється кресленням, де на Фіг. представлена структурна схема системи демпфірування кутових швидкостей космічного літального апарата з реактивними виконавчими органами. Система містить датчик подовжньої кутової швидкості 1, датчик першої поперечної кутової швидкості 2, датчик другої поперечної кутової швидкості 3, блок 4 підключення датчика 1, блок 5 підключення датчика 2, блок 6 підключення датчика 3, блок 7 керування виконавчими органами по 26160 4 довжнього каналу, блок 8 керування виконавчими органами першого поперечного каналу, блок 9 керування виконавчими органами другого поперечного каналу, виконавчі органи подовжнього каналу 10, виконавчі органи першого поперечного каналу 11, виконавчі органи другого поперечного каналу 12, блок 13 визначення початку демпфірування подовжньої швидкості, блок 14 визначення потрібної подовжньої кутової швидкості, блок 15 мінімізації витрат робочого тіла. Після відділення від носія виникають початкові кутові швидкості, які необхідно демпфірувати. Запропонована система дозволяє вирішити цю задачу, за потрібний час демпфірування, забезпечуючи мінімізацію витрат робочого тіла. Рівняння руху для вісесиметричного космічного апарата в зв'язаній системі координат OXYZ (приймемо, що віссю симетрії є вісь X) записуються в наступному вигляді (збурюючі моменти передбачаються малими і не враховуються) [див. Алексеев К. Б., Бабенин Г. Г. Управление космическими летательными аппаратами. М, «Машиностроение», 1974. 340с]: · w x = mx ; · w y - a × wz × wx = my ; (1) · w z + a × wy × wx = m z ; де wx, wz, wy - проекції кутової швидкості космічного апарата на осі зв'язаної системи координат: wx - подовжня кутова швидкість; wy - перша поперечна кутова швидкість; wz - друга поперечна кутова швидкість; m x , m y , m z - проекції приведеного керуючого моменту, my = mz = m ; a - константа. Вважаємо, що в початковий момент часу складові кутової швидкості задовольняють співвідношенню wi = wi0, i = X, Y, Z . Знайдемо вільний рух апарата шляхом інтегрування системи (1) при mi = 0 : wx = wxo ; wy = r0 × sin a ; (2) wz = r0 × cos a , де r0 = wy0 2 + wz0 2 - модуль поперечної ку тової швидкості; a = a × wxo × t + arctg · wyo = a0 × t + a 0 wzo (3) a - кут між напрямком поперечної кутової швидкості і віссю Z. Згідно і формулою (2) поперечна кутова швидкість перерозподіляється між проекціями на осі Y і Z, при цьому перша і друга поперечні кутові швидкості змінюються в часі від 0 до r0 . Коли напрямок поперечної кутової швидкості збігається з віссю Y, тоді wy = r0 , wz = 0 , а якщо з віссю Z 5 26160 wz = r0 , wy = 0 . Згідно з формулою (3) час руху до цього положення дорівнює: a T= 0 (4) · a0 В цей момент необхідно демпфірувати подовжню кутову швидкість, тоді поперечна кутова швидкість не змінюється і збігається з віссю Y чи віссю Z . При цьому при демпфіруванні поперечної кутової швидкості мінімізується витрата робочого тіла через коллинеарність векторів поперечної кутової швидкості і керуючого моменту і величина економії витрат робочого тіла DG ek рівняється: r DGek = Gc 0 (sin a 0 + cos a0 - 1) , m (5) де Gc - секундна витрата робочого тіла. В випадку коли час демпфірування обмежений заданою величиною Tg, то при малих значеннях wxo час Т (див. формулу (4)) може перевершити Tg. Щоб цього запобігти необхідно подовжню кутову a0 , швидкість збільшити до величини wпр x = a × Tg шляхом включення керуючих двигунів в подовжньому каналі. При цьому додаткові витрати робочого тіла DGвит рівняються: DGвит = Gc × 2 wпр x - wxo mx (6) Якщо DG ek ñ DGвит , то подальша послідовність дій по управлінню така як і в випадку T
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of damping angular velocities of spaceship
Автори англійськоюBandura Ivan Mykolaiovych, Kolesnykov Hennadii Viktorovych
Назва патенту російськоюСистема демпфирования угловых скоростей космического летательного аппарата
Автори російськоюБандура Иван Николаевич, Колесников Геннадий Викторович
МПК / Мітки
МПК: B64G 1/24
Мітки: літального, кутових, космічного, демпфірування, система, швидкостей, апарата
Код посилання
<a href="https://ua.patents.su/4-26160-sistema-dempfiruvannya-kutovikh-shvidkostejj-kosmichnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система демпфірування кутових швидкостей космічного літального апарата</a>
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11855
Опубліковано: 16.01.2006
Автори: Снагіцький Сергій Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: система, літального, космічного, кутових, апарата, швидкостей, демпфірування, вісесиметричного
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Войченко Оксана Олександрівна
МПК: B64G 1/24
Мітки: демпфірування, спосіб, літального, космічного, швидкостей, кутових, вісесиметричного, апарата
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 12002
Опубліковано: 16.01.2006
Автори: Шапранов Ілля Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: космічного, кутових, початкових, система, швидкостей, вісесиметричного, апарата, літального, гасіння
Формула / Реферат:
Система гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої і другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого і другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Гіроскопічна система керування кутовим станом космічного літального апарата
Номер патенту: 24489
Опубліковано: 10.07.2007
Автори: Великородня Юлія Сергіївна, Дибська Ирина Юріївна, Гордін Олександр Григорович
МПК: B64G 1/28
Мітки: апарата, літального, гіроскопічна, керування, станом, кутовим, система, космічного
Формула / Реферат:
1. Гіроскопічна система керування кутовим станом космічного літального апарата, яка містить по кожній осі ортогональної системи координат, зв'язаної з корпусом, триступеневий силовий гіроскоп змінної структури, що дозволяє трансформувати його в двоступеневий силовий гіроскоп, аретуючий пристрій на зовнішній рамі гіроскопа, датчик моменту та демпфіруючий пристрій на осі підвісу внутрішньої рами, яка відрізняється тим, що по кожній осі...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Величко Надія Вікторівна, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: стабілізації, безпілотного, літального, апарата, система
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Попередній патент: Послідовний резонансний інвертор
Наступний патент: Фотопапір для виготовлення фотокарток
Випадковий патент: Літак конструкції, що забезпечує врятування пасажирів і екіпажу при наближенні неминучої катастрофи