Система стабілізації бокового каналу безпілотного літального апарата
Номер патенту: 36498
Опубліковано: 27.10.2008
Автори: Жалніна Вікторія Василівна, Бондар Катерина Михайлівна, Амелін Сергій Вікторович
Формула / Реферат
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та датчик кутової швидкості, які послідовно з'єднані з виходами об'єкта керування, яка відрізняється тим, що до її складу введені нормуючі підсилювачі, входи яких з'єднані з виходами блока датчиків кутів і блока датчиків кутових швидкостей, блок датчиків кутів відхилення елеронів та керма напрямку, вхід котрого з'єднаний з об'єктом керування, а виходи - з входами блоків формування керуючої напруги, другий блок формування керуючої напруги, перший вхід якого з'єднаний з виходом нормуючого підсилювача через електронний ключ, а вихід - з входом сервоприводу, блоки підстройки нулів операційних підсилювачів, виходи яких з'єднані з нормуючими підсилювачами, другим порівнювальним пристроєм та першим і другим блоками формування керуючої напруги.
Текст
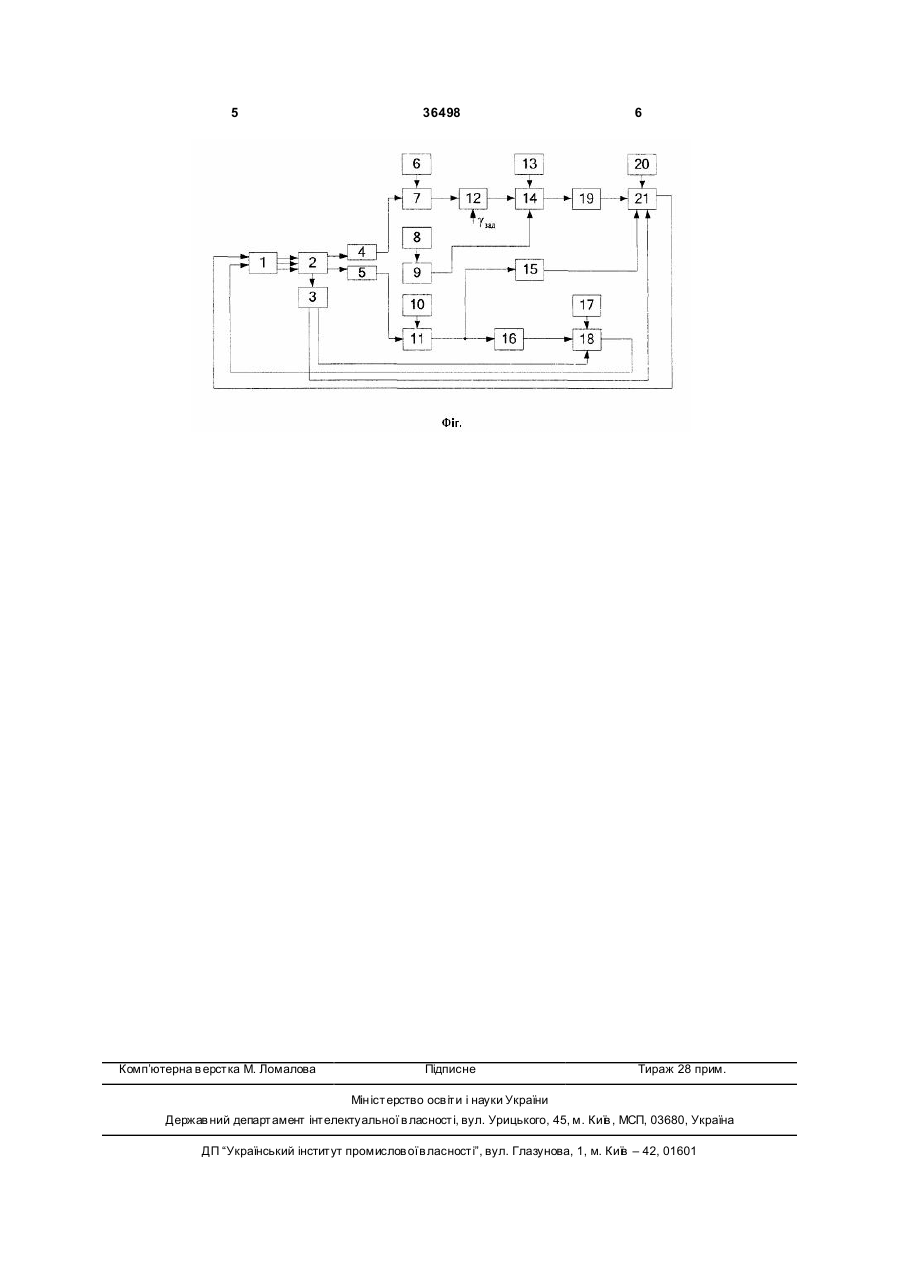
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та 3 36498 виходом нормуючого підсилювача через електронний ключ, а вихід - з входом сервоприводу, блоки підстройки нулів операційних підсилювачів, виходи яких з'єднані з нормуючими підсилювачами, другим порівнювальним пристроєм та першим і другим блоками формування керуючої напруги. Сутність корисної моделі пояснюється кресленням, де на Фіг. зображена загальна блок-схема запропонованої системи стабілізації бокового каналу безпілотного літального апарата. Система стабілізації бокового каналу безпілотного літального апарата містить: об'єкт керування 2, що має в своєму складі блок датчиків кутів 4, блок датчиків кутови х швидкостей 5, блок датчиків кутів відхилення елеронів та керма напрямку 3, виходи яких з'єднані з входами першого, другого і третього нормуючих підсилювачів (7, 9, 11) і першого, другого блоків формування керуючої напруги (18, 21) відповідно; виходи відповідних блоків підстройки нулів операційних підсилювачів (6, 8, 10, 13, 17, 20) з'єднані з блоками (7, 9, 11, 14, 18, 21); вихід першого нормуючого підсилювача 7 з'єднаний з входом першого порівнювального пристрою 12; вихід першого порівнювального пристрою 12 з'єднаний з входом другого порівнювального пристрою 14; вихід др угого порівнювального пристрою 14 з'єднаний з входом першого блоку формування керуючої напруги 21 через перший ключ 19, а вихід блоку 21 з'єднаний з блоком сервоприводів 1, що входить до складу об'єкта керування 2; перший вхід першого блоку формування керуючої напруги 21 з'єднаний з виходом блоку датчиків кутів відхилення елеронів та керма напрямку 3, а другий вхід - з виходом блоку датчиків кутової швидкості 5 через третій нормуючий підсилювач 11 та третій ключ 15; вхід блоку формування керуючої напруги 18 з'єднаний з виходом блоку датчиків кутової швидкості 5 через третій нормуючий підсилювач 11 та другий ключ 16; вихід другого блоку формування керуючої напруги 18 з'єднаний з входом блоку сервоприводу 1. Система стабілізації бокового каналу безпілотного літального апарата працює таким чином: під час польоту на перший вхід порівнювального пристрою 12 подається сигнал про задане значення кута крену, який порівнюється з сигналом дійсного значення кута крену, що вимірюється блоком дат 4 ків кутів 4 та подається через нормуючий підсилювач 7 на другий вхід порівнювального пристрою 12. Якщо між цими сигналами є різниця, то сигнал передається на порівнювальний пристрій 14. Сигнал про кутову швидкість крену поступає від блоку датчиків кутових швидкостей 5 на підсилювач 9, а далі - на другий вхід порівнювального пристрою 14 для забезпечення демпфірування пружних коливань корпуса літального апарата під час польоту. Сигнал з виходу порівнювального пристрою 14 через ключ 19 поступає на вхід блоку формування керуючої напруги 21, на який також приходить сигнал від блоку датчиків кутів відхилення елероні та керма напрямку 3 про заданий кут відхилення елеронів та сигнал перехресного зв'язку від блоку датчиків кутової швидкості 5 через нормуючий підсилювач 11 та ключ 15. Якщо ключ 15 вимкнений, то сигнал перехресного зв'язку не поступає до блоку формування керуючої напруги 21 і тоді реалізується закон керування лише по крену. Керуючий сигнал подається на блок сервоприводів 1, який перетворює сигнали керування у відповідні переміщення елеронів, які подаються на об'єкт керування 2. Для керування кермом напрямку керуючий сигнал формується другим блоком формування керуючої напруги 18 на основі інформації про дійсне значення кутової швидкості курсу, котра поступає від об'єкта керування 2 через блок датчиків кутової швидкості 5 через нормуючий підсилювач 11 та ключ 16, а також про необхідне значення кута відхилення керма напрямку, яка поступає від блоку датчиків кутів відхилення елероні та керма напрямку 3. Сигнал виходу другого блоку формування керуючої напруги 18 поступає на блок сервоприводів 1, що входить до складу об'єкта керування 2. Нормуючі підсилювачі (7, 9, 11), порівнювальні пристрої (12, 14) та блоки формування керуючої напруги (18, 21) побудовані на операційних підсилювачах, нулі котрих можна підстроїти за допомогою відповідних блоків підстройки нулів операційних підсилювачів (6, 8, 10, 13, 17, 20). Таким чином, система забезпечує підвищення точності керування положенням безпілотного літального апарата в боковому каналі руху та підвищення стійкості бокового руху. 5 Комп’ютерна в ерстка М. Ломалова 36498 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of stabilization of side channel of pilot-less aircraft
Автори англійськоюAmelin Serhii Viktorovych, Zhalnina Viktoria Vasylivna, Bondar Kateryna Mykhailivna
Назва патенту російськоюСистема стабилизации бокового канала беспилотного летательного аппарата
Автори російськоюАмелин Сергей Викторович, Жалнина Виктория Васильевна, Бондарь Катерина Михайловна
МПК / Мітки
МПК: G05D 1/03
Мітки: каналу, система, апарата, літального, бокового, безпілотного, стабілізації
Код посилання
<a href="https://ua.patents.su/3-36498-sistema-stabilizaci-bokovogo-kanalu-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації бокового каналу безпілотного літального апарата</a>
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Симонов Володимир Федорович, Литвиненко Денис Володимирович, Паніна Алла Володимирівна
МПК: G05D 1/03
Мітки: апарата, система, стабілізації, літального, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Амеліна Ірина Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: кутової, адаптивна, стабілізації, апарата, безпілотного, літального, система
Формула / Реферат:
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу,...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Величко Надія Вікторівна, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, безпілотного, система, літального, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Антошик Вікторія Миколаївна, Бандура Іван Миколайович, Амелін Сергій Вікторович
МПК: B64C 13/00, G05D 1/03
Мітки: система, апарата, літального, безпілотного, стабілізації
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Пристрій для кутової стабілізації безпілотного літального апарата

Номер патенту: 29176
Опубліковано: 10.01.2008
Автори: Субота Анатолій Максимович, Амеліна Ірина Вікторівна, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: літального, пристрій, стабілізації, безпілотного, кутової, апарата
Формула / Реферат:
Пристрій для кутової стабілізації безпілотного літального апарата, що містить датчик відхилення кутового положення літального апарата від програмного значення, перетворювач аналог-код, форсуючу ланку, перший перетворювач код-аналог, рульовий привід органів керування, перший, другий, третій та четвертий блоки інтегрування, перший, другий та третій інвертори, перший і другий блоки виділення знака сигналу, блок визначення функції зсуву та...
Попередній патент: Спосіб підвищення захисту організму молодняку птиці при вакцинації
Наступний патент: Спосіб моделювання гострого перитоніту
Випадковий патент: Спосіб одержання деталей з високоміцного чавуну