Пристрій для запобігання зіткненню суден
Формула / Реферат
Пристрій для запобігання зіткненню суден, що містить блок порівняння, датчики пеленга, дальності, курсу і швидкості, який відрізняється тим, що в пристрій введена система первинної обробки, яка містить блок визначення всіх параметрів на загальні прямокутні координати, зв'язаний з автоматичною ідентифікаційною системою, блок перетворення полярних координат на прямокутні координати, зв'язаний з береговою радіолокаційною станцією, блок заданого алгоритму, що визначає параметри руху суден, підключений до автоматичної ідентифікаційної системи, блок порівняння розрахованих значень із припустимим, підключений до блоків визначення всіх параметрів на загальні прямокутні координати, перетворення полярних координат на прямокутні і заданого алгоритму, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення для оцінки і вирішення задачі розбіжності між суднами, блок графічного зображення для вибору виду маневру безпечного розходження суден, блок органів керування, блок табличної інформації про вид безпечного маневру і блок табличної інформації про безпечний кут зміни курсу судна.
Текст
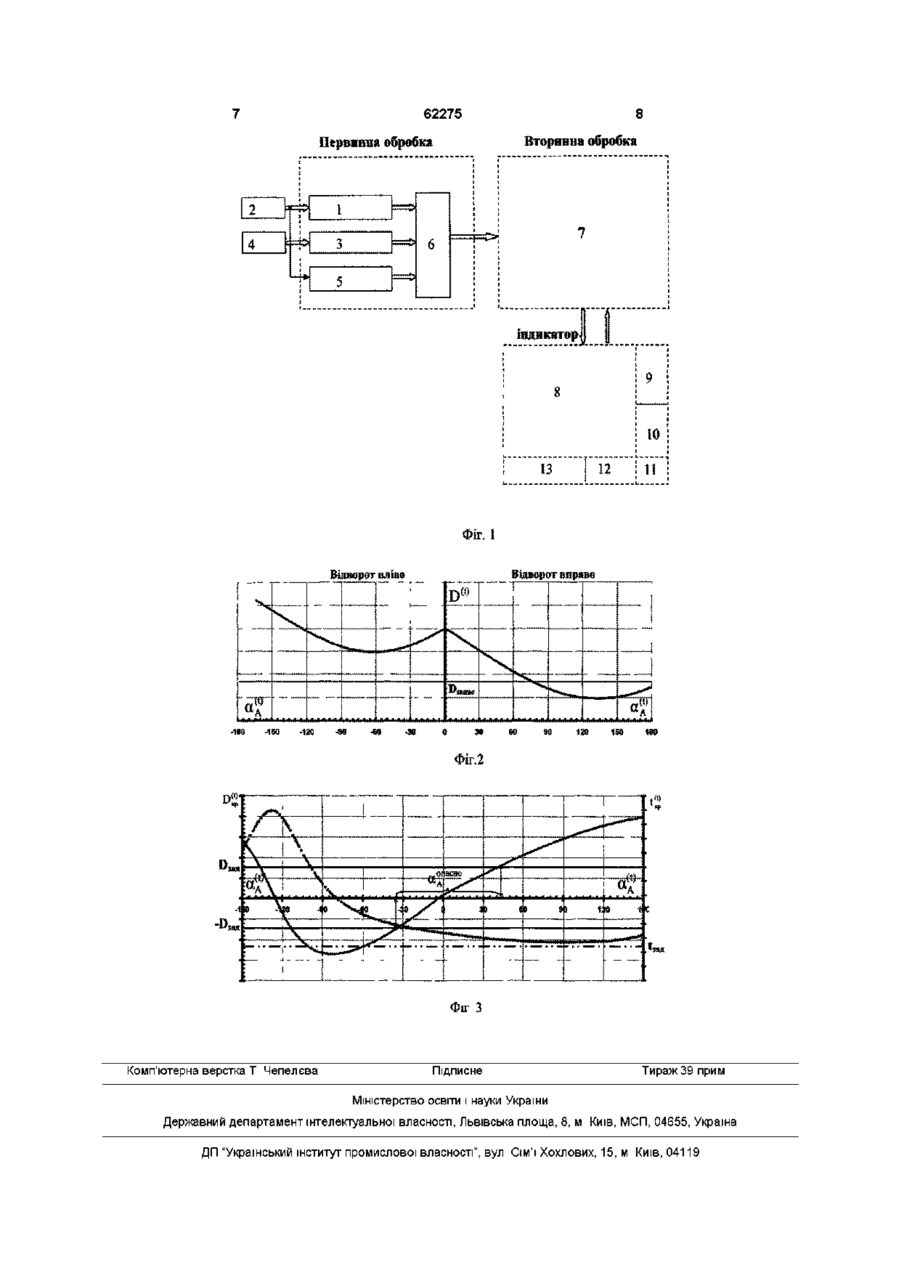
Пристрій для запобігання зіткненню суден, що містить блок порівняння, датчики пеленга, дальності, курсу і швидкості, який відрізняється тим, що в пристрій введена система первинної обробки, яка містить блок визначення всіх параметрів на загальні прямокутні координати, зв'язаний з автоматичною ідентифікаційною системою, блок перетворення полярних координат на прямокутні координати, зв'язаний з береговою радіолокаційною станцією, блок заданого алгоритму, що визначає параметри руху суден, підключений до автоматичної ідентифікаційної системи, блок порівняння розрахованих значень із припустимим, підключений до блоків визначення всіх параметрів на загальні прямокутні координати, перетворення полярних координат на прямокутні і заданого алгоритму, а також систему вторинної обробки, що містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення для оцінки і вирішення задачі розбіжності між суднами, блок графічного зображення для вибору виду маневру безпечного розходження суден, блок органів керування, блок табличної інформації про вид безпечного маневру і блок табличної інформації про безпечний кут зміни курсу судна Винахід відноситься до засобів автоматизованого керування суднами і може бути використаний як засіб автоматичної радіолокаційної прокладки курсу для запобігання зіткнення суден при прямолінійному і криволінійному русі Відомо, ЩО системи автоматичної радіолокаційної прокладки складаються з радіолокаційної станції й обчислювальної машини [1] Недоліком цієї системи є те, що не стійко супроводжуються ЦІЛІ зі слабкими сигналами, не виключена можливість обчислення помилкових параметрів руху цілей Найбільш близьким по технічній сутності є пристрій для запобігання зіткнення суден, що містить блок порівняння, датчик дальності, датчик пеленга, датчик курсу і датчик швидкості [2] Недоліком є неточність виміру і великі габарити пристрою, неможливість визначення безпечного кута зміни курсу судна В основу винаходу поставлена задача створення пристрою для запобігання зіткнення суден, у якому передбачений блок перетворення прямокутних координат, блок визначення параметрів і порівняння, система вторинної обробки, це забезпе чує рішення задачі безпечної розбіжності суден, що запобігає зіткнення і забезпечує безпеку мореплавства Поставлена задача зважується тим, що в пристрої для запобігання зіткнення суден, який містить блок порівняння, датчики пеленга, дальності, курсу і швидкості, ВІДПОВІДНО до винаходу, введена система первинної обробки, що містить блок визначення всіх параметрів на загальні прямокутні координати, зв'язаний з автоматичною ідентифікаційною системою, блок перетворення полярних координат на прямокутні координати, зв'язаний з береговою радіолокаційною станцією, блок заданого алгоритму, що визначає параметри руху суден, підключений до автоматичної ідентифікаційної системи, блок порівняння розрахованих значень із припустимими, підключений до блоків визначення всіх параметрів на загальні прямокутні координати, перетворення полярних координат на прямокутні і заданого алгоритму Система вторинної обробки містить електронну обчислювальну машину, зв'язану з індикатором, що має дисплей, блок графічного зображення для оцінки і рішення задачі розбіжності між суднами, блок графічного ю (О 62275 зображення для вибору виду маневру безпечної ження для вибору виду маневру безпечної розбіжрозбіжності суден, блок органів керування, блок ності суден 10, блок органів керування 11, блок табличної інформації про вид безпечного маневру табличної інформації про вид безпечного маневру і блок табличної інформації про безпечний кут змі12 і блок табличної інформації про безпечний кут ни курсу судна зміни курсу судна 13 На фіг 1 - блок-схема пристрою для запобіганПристрій для запобігання зіткнення суден праня зіткнення суден цює в такий спосіб У системі первинної обробки, сигнали (назва, координати, швидкості, курси, маНа фіг 2 - графік для вибору виду маневру неврені характеристики суден) від АІСу 2 надхобезпечної розбіжності суден дять у блок визначення всіх параметрів на загальНа фіг 3 - графік для оцінки і рішення задачі ні прямокутні координати 1 Сигнали (пеленги і розбіжності між суднами дистанції) від БРЛС 4 надходять у блок перетвоПристрій для запобігання зіткнення суден, має рення полярних координат на прямокутні коордисистему первинної обробки, що містить блок винати 3, одночасно блок заданого алгоритму 5 одезначення всіх параметрів на загальні прямокутні ржує сигнали від АІСу 2 (координати, осадка, координати 1, зв'язаний з автоматичною ідентифіводотоннажність, характеристики руля і гвинта, ) каційною системою 2 (АІС), блок перетворення і виробляє сигнали (місце положення, радіуси цирполярних координат на прямокутні координати З, куляцій суден, ), що після цього надходять у блок зв'язаний з береговою радіолокаційною станцією 4 6, де відбувається порівняння трьох сигналів від (БРЛС) Блок заданого алгоритму 5, що визначає блоків 1, 3 і 5, після чого одержують достовірну параметри руху суден, підключений до автоматичінформацію про рух суден (координати, швидкості, ної ідентифікаційної системи 2 Блок порівняння курси, ) розрахованих сигналів із припустимими значеннями 6 підключений до блоків визначення всіх параУ системі вторинної обробки за допомогою метрів на загальні прямокутні координати 1, переелектронної обчислювальної машини 7 обчислютворення полярних координат на прямокутні 3 і ють кути небезпечної зміни курсу судна, вид незаданого алгоритму 5 Система вторинної обробки безпечного відвороту і також малюють графіки для містить електронну обчислювальну машину 7, оцінки і рішення задачі розбіжності між суднами і зв'язану з індикатором, що має дисплей 8, блок для вибору виду маневру безпечної розбіжності графічного зображення для оцінки і рішення задачі суден по формулах (1), (2), (3), (4), (5) і (6) розбіжності між суднами 9, блок графічного зобраДля відвороту вправо Otf-YT)+(V£°> + dpyBnp sln ( (1) -V(°) cos(K(°))) , + dpxBnp + dpxBnp 7 S(iyBnp (2) dpyBnp COS(KJ?>)- V™ (3) Дпя відвороту вліво D(tl = cos(K(°))-VB°) )-Ув°>5іп(К)] (4) 62275 cos(K(°))) (tl t = (5) /(V™ cos(K
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for preventing collision of vessels
Назва патенту російськоюУстройство для предотвращения столкновения судов
МПК / Мітки
МПК: G08G 3/00
Мітки: пристрій, зіткненню, суден, запобігання
Код посилання
<a href="https://ua.patents.su/4-62275-pristrijj-dlya-zapobigannya-zitknennyu-suden.html" target="_blank" rel="follow" title="База патентів України">Пристрій для запобігання зіткненню суден</a>
Спосіб і пристрій для запобігання зіткненню літального апарата з землею, з поліпшеним оглядом
Номер патенту: 61915
Опубліковано: 15.12.2003
Автори: Мьон'є Юге, Лепер Жерар
МПК: B64D 45/00, G05D 1/00, G01C 5/00, G08G 5/00
Мітки: пристрій, апарата, запобігання, літального, поліпшеним, землею, зіткненню, оглядом, спосіб
Формула / Реферат:
1. Пристрій сприяння забезпеченню повітряної навігації, що містить:- вхід, призначений для прийому інформації про стан, репрезентативний для просторового положення і вектора швидкості літального апарата,- робочий запам'ятовуючий пристрій, призначений для зберігання просторового тривимірного зображення рельєфу земної поверхні в області, яку пролітає даний літальний апарат,- засоби обробки інформації, здатні визначити в...
Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів з перешкодами
Номер патенту: 50101
Опубліковано: 15.10.2002
Автор: Лялько Віктор Григорович
МПК: G01C 21/00, B64C 19/00
Мітки: спосіб, автоматичного, перешкодами, апаратів, комбінований, літальних, запобігання, зіткненню
Формула / Реферат:
1 .Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів (ЛА) з перешкодами на висотах польоту Нс = Нвд + 400 м і нижче, де: Нс - висота стабілізації ЛА на термін зміни режиму управління; Hвд - висота, обчислена бортовою цифровою обчислювальною машиною (БЦОМ), висота відносна мінімально допустима в момент початку вертикального маневру по запобіганню зіткненню з наземною перешкодою; 400 м - запас висоти на термін...
Пристрій для попередження зіткнень повітряних суден
Номер патенту: 25757
Опубліковано: 30.10.1998
Автори: Шутко Микола Олександрович, Білецький Анатолій Якович, Совтус Інна Кузьмівна, Корнійчук Май Тихонович, Семенченко Андрій Іванович, Троценко Володимир Петрович
МПК: G06F 15/17
Мітки: повітряних, попередження, суден, пристрій, зіткнень
Формула / Реферат:
1. Пристрій для попередження зіткнень повітряних суден [1], що містить три регістри, дешифратор, три елементи АБО, два суматори, блок постійної пам'яті, n елементів І, n блоків обробки першої, другої та третьої координати, n блоків аналізу курсу, виходи яких утворюють n перших керуючих виходів пристрою, інформаційні входи першого, другого й третього регістрів є першою, другою й третьою групами одноіменних входів пристрою відповідно, виходи...
Понтонний пристрій для підйому суден, що затонули
Номер патенту: 36984
Опубліковано: 16.04.2001
Автори: Кобилянський Валентин Олександрович, Свірідов Володимир Степанович
МПК: B63C 7/02
Мітки: понтонний, підйому, затонули, суден, пристрій
Текст:
...2 вибирають слабину вантаж ного троса до натягу, фіксують того гальмовими стопорами 3. Після цього процес опускання блока понтонів і підняття судна, що затонуло, повторюється, поки воно не опиниться усередині блока понтонів. Фіг. 1 2 36984 Фіг. 2 Фіг. 3 3 36984 Фіг. 4 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі...
Пристрій для зменшення гідродинамічного опору суден при великих швидкостях руху
Номер патенту: 46883
Опубліковано: 17.06.2002
Автори: Юрченко Іван Валерійович, Юрченко Андрій Валерійович, Юрченко Валерій Іванович
МПК: B63B 1/32
Мітки: великих, руху, пристрій, гідродинамічного, суден, опору, зменшення, швидкостях
Формула / Реферат:
Пристрій для зменшення гідродинамічного опору суден при великих швидкостях руху, що складається з циліндричних коліс, встановлених на корпусі судна, який відрізняється тим, що на колесах встановлено замкнену еластичну стрічку, яка є основним елементом контакту судна з поверхнею води, колеса виконано спрямовуючими і вибірково ведучими з амортизацією, причому ведучі колеса виконано з можливістю рухатись під дією рушія тільки після виходу судна...
Попередній патент: Силова секція-поршень для магнітного транспорту
Наступний патент: Пристрій для навчання письма
Випадковий патент: Спосіб одержання складного ефіру органічних кислот і 5-гідроксиметилфурфуролу