Інтегратор сигналів системи автоматики неелектричного типу
Номер патенту: 41780
Опубліковано: 10.06.2009
Автори: Божок Аркадій Михайлович, Венгер Микола Анатолійович, Волинкін Микола Петрович, Майсус Василь Володимирович
Формула / Реферат
Інтегратор сигналів систем автоматики неелектричного типу, що містить циліндричний порожнистий корпус з торцевими фланцями, співвісно установленими наскрізною тягою з поршнем, який відрізняється тим, що в циліндрі закріплений з одного торця фланець, а протилежний торець вільний, через який усередину додатково установлені другий рухомий і між першим і ним порожнистий нерухомий поршні, які зв'язані між собою і фланцем зовнішніми сильфонами і утворюють першу і другу порожнини з додатково установленими першим і другим внутрішніми сильфонами, причому один торець першого сильфона з'єднаний з першим рухомим поршнем, а другий торець - з тягою, а один торець другого сильфона - з тягою, а другий його торець - з фланцем, до якого додатково приєднаний фланець компенсаційного сильфона з циліндричною напрямною рухомого поршня, взаємодіючого через пружину з регулювальною кришкою, а порожнина компенсаційного сильфона з другою порожниною сполучена через регулюючий дросель.
Текст
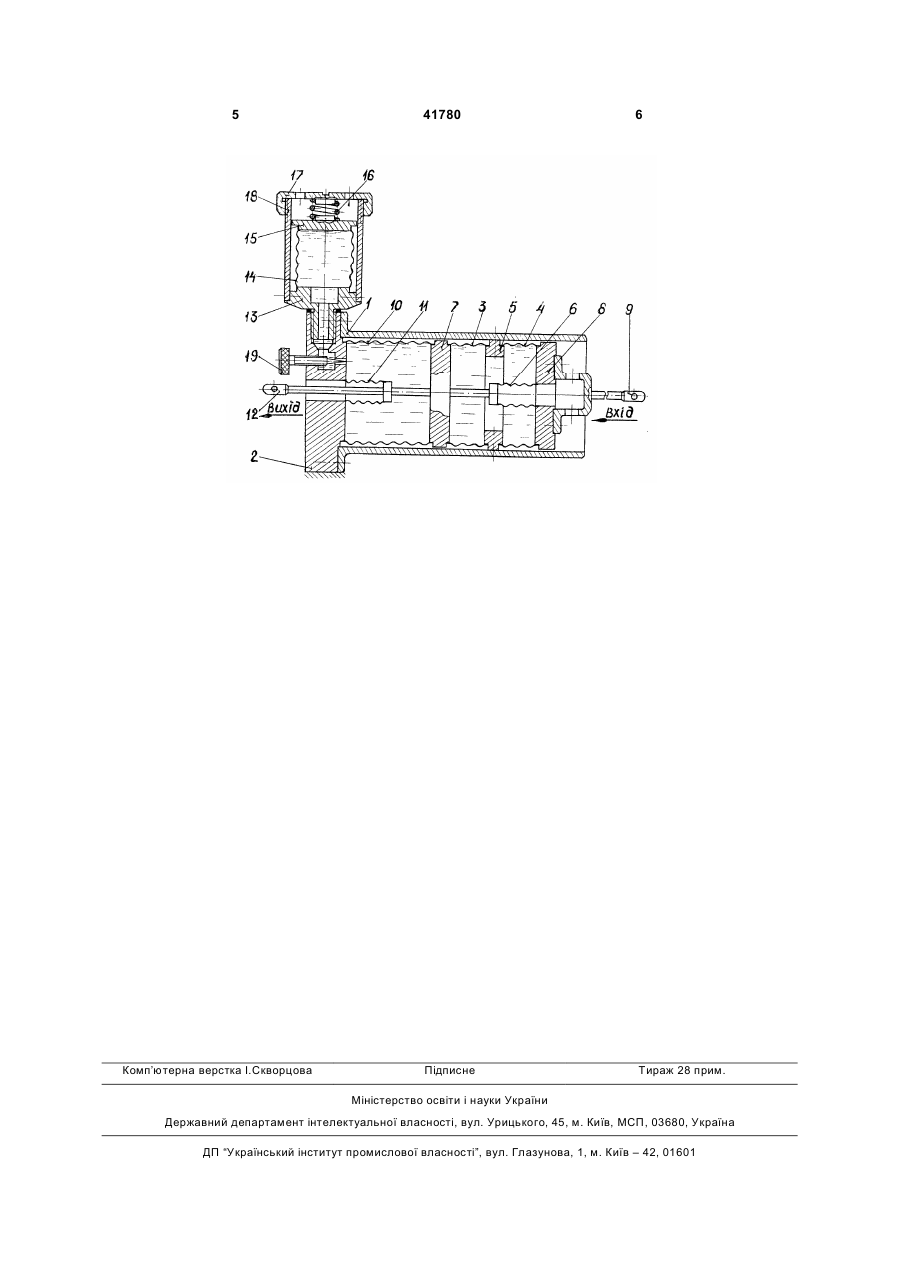
Інтегратор сигналів систем автоматики неелектричного типу, що містить циліндричний порожнистий корпус з торцевими фланцями, співвісно установленими наскрізною тягою з поршнем, який відрізняється тим, що в циліндрі закріплений з одного торця фланець, а протилежний торець ві 3 В перехідному процесі при такому технічному рішенні різко змінений вхідний сигнал на виході буде зменшуватися пропорційно змінюванню його швидкості, забезпечуючи вихідній тязі переміщення, пропорційне змінюванню вхідного сигнал і інтегралу від його змінювання. При мірі стабілізації вхідного сигналу складова пропорційна інтегралу зникає і на вихідній тязі залишається переміщення пропорційне тільки змінюванню вхідного сигналу. На представленому кресленні схематично показано загальний вигляд запропонованого інтегратора сигналів систем автоматики неелектричного типу. Запропонований інтегратор сигналів містить циліндричний корпус 1, до одного торця якого жорстко прикріплений нерухомий фланець 2, а другий торець виконаний вільним. Усередині корпуса 1 розміщені перша замкнена "а" і друга "б" порожнини. Порожнина "а" утворена зовнішніми 3, 4 сильфонами, з'єднаними нерухомим порожнистим поршнем 5 і першим внутрішнім сильфоном 6, зв'язаним із другим рухомим поршнем 7 і першим рухомим поршнем 8, який з'єднаний з тягою 9 вхідного сигнала. Друга порожнина "б" утворена зовнішнім 10 і другим внутрішнім 11 сильфонами, зв'язаними одними торцями з нерухомим фланцем 2, а другими торцями - 3 другим рухомим поршнем 7, з'єднаним вихідною тягою 12 з регулюючим органом CAP. До фланця 2 жорстко приєднаний нерухомий фланець 13 компенсаційного сильфона 14, рухомий поршень 15 якого впирається через пружину 16 в, регулюючу її ступінь затяжки, кришку 17 і переміщується в циліндричній напрямній 18, жорстко зв'язаний з фланцем 13. Друга "б" порожнина сполучена з порожниною компенсаційного сильфона через регулюючий дросель 19 голчатого типу. Роботу інтегратора сигналів, послідовно установленого в CAP, розглянемо для випадків різкого (миттєвого) і плавного (повільного) змінювання вхідного діяння. У першому випадку при різкому переміщенні тяг 9 і поршня 8 вліво тиск у першій "а" порожнині різко зростає, від чого другий рухомий поршень 7 переміститься вліво, створивши при цьому додатковий тиск робочої рідини в другій "б" порожнині. Однак тиск в цій порожнині буде знижуватись через перетікання крізь дросель 19 робочої рідини в компенсаційний сильфон 14, рухомий фланець 15 якого, долаючи зусилля пружини 16, буде підніматися. В результаті перепаду тисків в першій "а" і другій "б" порожнинах, рухомий поршень 7 буде 41780 4 переміщатися вліво з певним сповільненням, діючи через тягу 12 на регулюючий орган CAP. При цьому вхідною координатою інтегратора є переміщення тяги 9, спричинене дією вхідного сигналу, а вихідною координатою - переміщення другого рухомого поршня 7 і зв'язаної з ним вихідної тяги, яке пропорційне змінюванню вхідного сигналу і швидкості його змінювання, залежної від настроювання голчатого дроселя 19. Таким чином, вихід інтегратора буде складатися із різниці двох переміщень: першого, викликаного змінюванням вхідного сигналу (переміщенням тяги 9) і другого, викликаного швидкістю (першою похідною) його змінювання (сповільнене переміщення поршня 7, обумовлене перетіканням робочої рідини із порожнини "б" в порожнину компенсаційного сильфона 14). Причому при більш різкому змінюванні вхідного сигналу друга складова вихідного переміщення зростає. У випадку різкого переміщення тяги 9 і поршня 8 вправо описаний інтегратор працюватиме аналогічно лише з тією різницею, що вихідне переміщення тяги 12 і його рухомих деталей будуть направлені в протилежний бік. В описаних двох випадках різкого змінювання вхідного сигналу інтегратор працює як підсилювально-інтегруюча ланка систем автоматики. У випадку плавного переміщення тяги 9 і поршня 8 вліво, перепад тисків робочої рідини в першій "а" і другій "б" порожнинах практично буде відсутній, , тому перший 8 і другий 7 рухомі поршні будуть переміщатися вліво з однаковою швидкістю. В даному випадку вихідне переміщення інтегратора (вихідної тяги 12) буде складатися тільки з переміщення, викликаного змінюванням вхідного сигналу і він працюватиме як підсилювальна ланка систем автоматики. Отже, запропонований інтегратор сигналів є гнучким і ефективним засобом покращення параметрів перехідних процесів CAP і САК неелектричного типу. Застосування запропонованого інтегратора, у порівнянні з уже відомим, дасть можливість: - підвищити точність функціонування CAP і САК шляхом вилучення тертьових кінематичних пар корпус-поршень і корпус-шток, витікань через них робочої рідини, сил тертя і пов'язаних з цим нелінійностей; - локально використовувати в будь-яких CAP і САК як підсилювально-інтегруючу динамічну ланку, послідовно включену в ланцюг системи регулювання або керування, що розширить область його застосування. 5 Комп’ютерна верстка І.Скворцова 41780 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIntegrator of signals of system of automation of non-electric type
Автори англійськоюBozhok Arkadii Mykhailovych, Maisus Vasyl Volodymyrovych, Volynkin Mykola Petrovych, Venher Mykola Anatoliiovych
Назва патенту російськоюИнтегратор сигналов системы автоматики неэлектрического типа
Автори російськоюБожок Аркадий Михайлович, Майсус Василий Владимирович, Волынкин Николай Петрович, Венгер Николай Анатольевич
МПК / Мітки
Мітки: інтегратор, сигналів, неелектричного, автоматики, типу, системі
Код посилання
<a href="https://ua.patents.su/3-41780-integrator-signaliv-sistemi-avtomatiki-neelektrichnogo-tipu.html" target="_blank" rel="follow" title="База патентів України">Інтегратор сигналів системи автоматики неелектричного типу</a>
Диференціатор сигналів систем автоматики неелектричного типу
Номер патенту: 31153
Опубліковано: 25.03.2008
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
Мітки: сигналів, неелектричного, типу, диференціатор, систем, автоматики
Формула / Реферат:
Диференціатор сигналів систем автоматики неелектричного типу, що містить підсумовуючий важіль, вузол приймання вхідних сигналів, з'єднаний через дросель з першим сильфоном перетворювача і безпосередньо - з другим сильфоном, жорстко з'єднаним з першим сильфоном через фланець, зв'язаний тягою з одним із кінців підсумовуючого важеля, а сильфони перетворювача і вузла приймання вхідних сигналів розміщені в циліндричних напрямних втулках, жорстко...
Диференціатор сигналів неелектричного типу
Номер патенту: 39856
Опубліковано: 10.03.2009
Автор: Божок Аркадій Михайлович
Мітки: диференціатор, неелектричного, типу, сигналів
Формула / Реферат:
Диференціатор сигналів неелектричного типу, що містить вхідну і вихідну тяги, рухомий корпус з першим поршнем, підсумовуючий важіль, вісь якого з'єднана з вхідною тягою, двоплечий важіль, зв'язаний верхнім плечем з вхідною тягою, нижнім плечем - з рухомим корпусом, а усередині поршня корпуса розміщений другий поршень, причому на бокових поверхнях поршнів і корпусі виконані співвісні отвори під підсумовуючий важіль, один із кінців яких рухомо...
Інтегратор
Номер патенту: 36109
Опубліковано: 16.04.2001
Автори: Петров Олексій Андрійович, Панкратов Анатолій Іванович
МПК: H02M 7/10
Мітки: інтегратор
Текст:
...першого ланцюжка під'єднана до анодів відповідних парних діодів 3 діодного ланцюжка через М-є резистори 6. Інтегратор працює таким чином. Якщо на вхідні виводи 4 і 5 поступає періодичний сигнал, то при позитивному сигналі діється заряд першого конденсатора першого ланцюжка до напруги: tö T ö æ æ UC1 = UВХ ç 1 - е - ÷ = UВХ ç 1 - е - 0 ÷ tø 2t ø è è (1) де UBX - амплітуда вхідного сигналу; T t = 0 - час заряду, дорівнює...
Комбінований диференціатор
Номер патенту: 31232
Опубліковано: 25.03.2008
Автори: Понеділок Володимир Францович, Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: комбінований, диференціатор
Формула / Реферат:
Комбінований диференціатор, що містить підсумовуючий механізм, два сильфони, з'єднані один з одним торцями рухомим фланцем і установлені в напрямній, і вузол приймання вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, при цьому підсумовуючий механізм виконаний у вигляді сильфона, розміщеного...
Диференціатор сигналів пневмоавтоматики
Номер патенту: 39887
Опубліковано: 10.03.2009
Автори: Божок Аркадій Михайлович, Понеділок Володимир Францович
Мітки: сигналів, пневмоавтоматики, диференціатор
Формула / Реферат:
Диференціатор сигналів пневмоавтоматики, що містить корпус з магістраллю повітропостачання і з дроселем, два вимірювачі тиску у вигляді підпружинених основної і додаткової діафрагм, з'єднаних з корпусом та утворюючих з ним основну і додаткову камери, з яких додаткова камера з магістраллю повітропостачання сполучена через дросель, основна камера - безпосередньо, і в основній камері розміщений перший підсумовуючий важіль з тягами, з'єднаними в...
Попередній патент: Спосіб спалювання твердого палива
Наступний патент: Спосіб виробництва двошарових біметалічних листових композицій
Випадковий патент: Дисковий подрібнювач